スケーリングおよびパフォーマンスガイド
OpenShift Container Platform 3.10 スケーリングおよびパフォーマンスガイド
概要
第1章 概要
本ガイドは、OpenShift Container Platform クラスターのパフォーマンスを向上し、OpenShift Container Platform プロダクションスタックの異なるレベルでスケーリングを行う方法についてその手順や例を提供しています。また、本書には、OpenShift Container Platform クラスターのビルド、スケーリング、チューニングの推奨プラクティスが説明されています。
チューニングの留意点は、クラスターの設定により異なり、本書に記載のパフォーマンスに関する推奨事項を実行することで他の部分に影響が及ぶ可能性があるので注意してください。
第2章 推奨されるインストール方法
2.1. 依存関係の事前インストール
ノードホストは、ネットワークにアクセスして、atomic-openshift-*、iptables および docker などの RPM 依存関係をインストールします。これらの依存関係を事前にインストールすると、RPM がインストール時にホストごとに何度もアクセスされるのではなく、必要な場合にのみにアクセスされるため、より効率的にインストールを実行できます。
また、この方法はセキュリティー上の理由でレジストリーにアクセスできないマシンにも役立ちます。
2.2. Ansible インストールの最適化
OpenShift Container Platform のインストール手法では Ansible を使用します。Ansible は並行して実行する操作に役立ち、迅速かつ効率的なインストールを促進します。ただし、これらの操作はチューニングオプションを追加してさらに強化することができます。利用可能な Ansible 設定オプションの一覧については、「Ansible の設定」を参照してください。
並行動作は、イメージレジストリーや Red Hat Satellite サーバーなどのコンテンツソースに負荷をかける可能性があります。サーバーのインフラストラクチャー Pod やオペレーティングシステムのパッチを用準備することで、この問題の回避できる可能性があります。
レイテンシーを最小限に抑えたコントロールノード (LAN 速度) からインストーラーを実行します。ワイドエリアネットワーク (WAN) での実行や、ネットワーク接続が途切れる可能性のある環境でのインストールの実行は推奨しません。
Ansible では、RHEL 6.6 以降を使用して OpenSSH のバージョンが ControlPersist をサポートすることを確認することや、クラスター内のマシンから 実行せずに、クラスターと同じ LAN からインストーラーが実行されるようにするなどの、独自のパフォーマンスやスケーリングに関する指針が提供されます。
以下は、Ansible で文書化されている推奨事項が組み込まれた、大規模なクラスターのインストールや管理を行うための Ansible の設定例です。
# cat /etc/ansible/ansible.cfg
# config file for ansible -- http://ansible.com/
# ==============================================
[defaults]
forks = 20
host_key_checking = False
remote_user = root
roles_path = roles/
gathering = smart
fact_caching = jsonfile
fact_caching_connection = $HOME/ansible/facts
fact_caching_timeout = 600
log_path = $HOME/ansible.log
nocows = 1
callback_whitelist = profile_tasks
[privilege_escalation]
become = False
[ssh_connection]
ssh_args = -o ControlMaster=auto -o ControlPersist=600s -o ServerAliveInterval=60
control_path = %(directory)s/%%h-%%r
pipelining = True
timeout = 102.3. ネットワークの留意事項
ネットワークサブネットの変更はインストール後に実行できますが、これを容易に実行することはできません。サイズを少なく見積もってしまうとクラスターを拡張する際に問題が発生する可能性があるので、ネットワークサブネットのサイズをインストール前に検討することにより作業を大幅に容易にすることができます。
ネットワークサブネットに関する推奨プラクティスは、「ネットワークの最適化」のトピックを参照してください。
第3章 ホストの推奨プラクティス
3.1. OpenShift Container Platform マスターホストの推奨プラクティス
OpenShift Container Platform インフラストラクチャーで、Pod トラフィックの他に最も使用されるデータパスは OpenShift Container Platform マスターホストと etcd 間のデータパスです。OpenShift Container Platform API サーバー (マスターバイナリーの一部) は、ノードのステータス、ネットワーク設定、シークレットなどについて etcd に確認します。
以下を実行してこのトラフィックパスを最適化します。
- マスターホストと etcd サーバーを共存させる
- マスターホスト間でレイテンシーが低く、混雑しない LAN 通信リンクを確保する
OpenShift Container Platform マスターは、CPU 負荷を軽減するためにデシリアライズされたバージョンのリソースを積極的にキャッシュします。ただし、1000 Pod 未満の小規模なクラスターでは、このキャッシュにより、無視できる程度の CPU 負荷を削減するために大量のメモリーが浪費される可能性があります。デフォルトのキャッシュサイズは 50,000 エントリーですが、リソースのサイズによっては 1 から 2 GB メモリーを占有する程度まで拡大する可能性があります。キャッシュのサイズは、/etc/origin/master/master-config.yaml で以下の設定を使用して縮小できます。
kubernetesMasterConfig:
apiServerArguments:
deserialization-cache-size:
- "1000"3.2. OpenShift Container Platform ノードホストの推奨プラクティス
OpenShift Container Platform ノード設定ファイルには、iptables 同期期間、SDN ネットワークの Maximum Transmission Unit (MTU)、プロキシーモードなどの重要なオプションが含まれます。ノードを設定するには、適切な「ノード設定マップ」を変更します。
node-config.yaml ファイルを直接編集しないでください。
ノード設定ファイルでは、kubelet (node) プロセスに引数を渡すことができます。kubelet --help を実行すると、利用可能なオプション一覧を表示できます。
kubelet オプションは、OpenShift Container Platform ですべてサポートされておらず、アップストリームの Kubernetes ですべてが使用されている訳ではないので、オプションによってはサポートに制限があります。
OpenShift Container Platform の各バージョンでサポートされている最大の制限については、「クラスターの制限」のページを参照してください。
/etc/origin/node/node-config.yaml ファイルでは、pods-per-core および max-pods の 2 つのパラメーターがノードにスケジュールできる Pod の最大数を制御します。オプションがどちらも使用されている場合には、2 つの内の低い値を使用して、ノードの Pod 数が制限されます。これらの値を超えると、以下の状況が発生します。
- OpenShift Container Platform と Docker の両方で CPU 使用率が上昇する。
- Pod のスケジューリングの速度が遅くなる。
- メモリー不足のシナリオが生じる可能性がある (ノードのメモリー量による)。
- IP アドレスのプールを消費する。
- リソースのオーバーコミットが起こり、アプリケーションのパフォーマンスが低下する。
Kubernetes では、単一コンテナーを保持する Pod は実際には 2 つのコンテナーを使用します。2 つ目のコンテナーは実際のコンテナーの起動前にネットワークを設定するために使用されます。そのため、10 の Pod を実行するシステムでは、実際には 20 のコンテナーが実行されていることになります。
pods-per-core は、ノードのプロセッサーコア数に基づいてノードが実行できる Pod 数を設定します。たとえば、4 プロセッサーコアを搭載したノードで pods-per-core が 10 に設定される場合、このノードで許可される Pod の最大数は 40 になります。
kubeletArguments:
pods-per-core:
- "10"
pods-per-core を 0 に設定すると、この制限が無効になります。
max-pods は、ノードのプロパティーにかかわらず、ノードが実行できる Pod 数を固定値に設定します。「クラスターの制限」では max-pods のサポートされる最大の値について説明しています。
kubeletArguments:
max-pods:
- "250"
上記の例では、pods-per-core のデフォルト値は 10 であり、max-pods のデフォルト値は 250 です。これは、ノードにあるコア数が 25 以上でない場合、デフォルトでは pods-per-core が制限を設定する要素になります。
OpenShift Container Platform クラスターの推奨制限については、インストールドキュメントの「サイジングに関する考慮事項」セクションを参照してください。推奨のサイズは、コンテナーのステータス更新時の OpenShift Container Platform と Docker の連携が基になっています。このように連携されることで、大量のログデータの書き込みなど、マスターや Docker プロセスの CPU に負荷がかかります。
3.3. OpenShift Container Platform etcd ホストの推奨プラクティス
etcd は、OpenShift Container Platform が設定に使用するキーと値の分散ストアです。
|
OpenShift Container Platform のバージョン |
etcd のバージョン |
ストレージスキーマのバージョン |
|
3.3 以前 |
2.x |
v2 |
|
3.4 および 3.5 |
3.x |
v2 |
|
3.6 |
3.x |
v2 (アップグレード) |
|
3.6 |
3.x |
v3 (新規インストール) |
etcd 3.x では、クラスターのサイズに拘わらず、CPU、メモリー、ネットワーク、ディスク要件を軽減する、スケーラビリティーおよびパフォーマンスの重要な強化機能が導入されました。etcd 3.x は、on-disk etcd データベースの 2 ステップ移行を簡素化する後方互換対応のストレージ API を実装します。移行の目的で、OpenShift Container Platform 3.5 の etcd 3.x は v2 モードのままとなっています。OpenShift Container Platform 3.6 以降では、新規インストールで v3 のストレージモードが使用されます。OpenShift Container Platform の以前のバージョンからアップグレードしても、v2 から v3 に自動で 移行されません。提供されている Playbook を使用して、ドキュメントに記載のプロセスに従い、データを移行する必要があります。
etcd バージョン 3 には、on-disk etcd データベースの 2 ステップ移行を簡素化する後方互換対応のストレージ API が実装されています。移行の目的で、OpenShift Container Platform 3.5 の etcd 3.x は v2 モードのままとなっています。OpenShift Container Platform 3.6 以降では、新規インストールで v3 のストレージモードが使用されます。お客様が etcd スキーマを v2 から v3 に移行する準備 (移行に関連するダウンタイムや検証など含む) ができるように、OpenShift Container Platform 3.6 では強制的にこのアップグレードは実行されません。ただし、幅広いテストを行った結果、Red Hat は既存の OpenShift Container Platform クラスターを etcd 3.x ストレージモード v3 に移行することを強く推奨します。これは特に、大規模なクラスターを使用されている場合や、SSD ストレージを利用できないシナリオなどが該当します。
今後の OpenShift Container Platform のアップグレードでは、etcd スキーマの移行が必要です。
新規インストールでストレージモードを v3 に変更するのに加え、OpenShift Container Platform 3.6 は、全 OpenShift Container Platform タイプに対して強制的に quorum reads を実行します。これは、etcd に対するクエリーが古くなったデータを返さないようにするために実行されます。単一ノードの etcd クラスターでは、古くなったデータが入っていても懸念はありませんが、実稼働クラスターで一般的に使用される高可用性の etcd デプロイメントでは、quorum read はクエリーの結果が有効になるようにします。quorum read は、データベース用語の 線形化可能性 (linearizable) と同じです。すべてのクライアントにクラスターが最新の状態に更新されたものが表示され、同じ順番の読み取りおよび書き込みが表示されます。パフォーマンスの向上に関する情報は、etcd 3.1 の announcement を参照してください。
OpenShift Container Platform は、etcd を使用して Kubernetes 自体が必要な情報以外の追加情報を保存する点を留意することが重要です。たとえば、Kubernetes 以外に OpenShift Container Platform が追加する機能で必要になるので、OpenShift Container Platform は、etcd にイメージ、ビルド、他のコンポーネントの情報を保存します。最終的に、etcd ホストのパフォーマンスやサイジングに関する指針やその他の推奨事項は、Kubernetes とは大幅に異なります。Red Hat は、OpenShift Container Platform のユースケースやパラメーターを考慮に入れて etcd のスケーラビリティーやパフォーマンスをテストし、最も正確な推奨事項を提案できるようにしています。
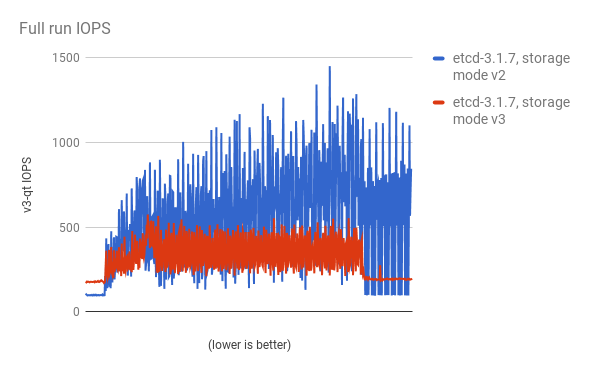
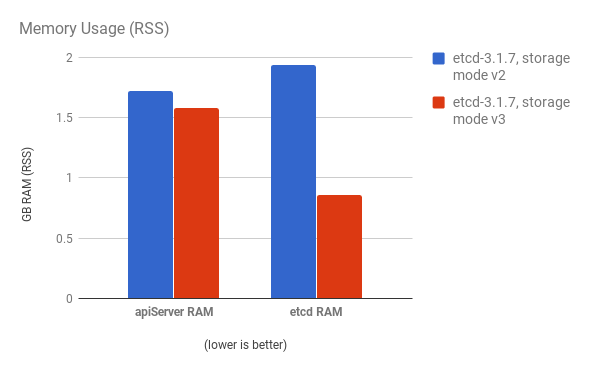
パフォーマンスの向上は、cluster-loader ユーティリティーで 300 ノードの OpenShift Container Platform 3.6 クラスターを使用して、定量化されています。etcd 3.x (ストレージモード v2) と etcd 3.x (ストレージモード v3) を比較すると、以下の図に示されるようにパフォーマンスの向上が明確に確認できます。
負荷のある状態でのストレージ IOPS が大幅に減少している:
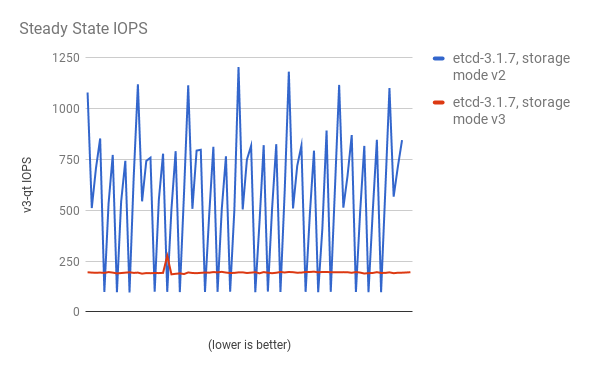
安定した状態でのストレージ IOPS が大幅に減少している:
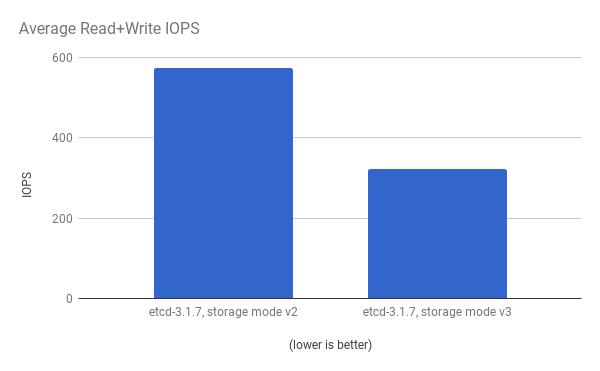
同じ I/O データの表示。両モードでの平均 IOPS
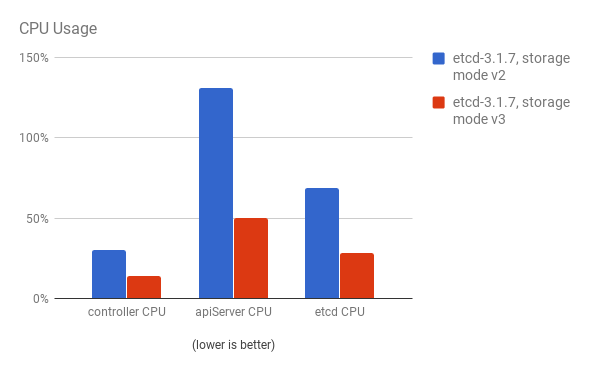
API サーバー (マスター) と etcd プロセスの両方の CPU 使用率が減少している:
API サーバー (マスター) と etcd プロセスの両方のメモリー使用率も減少している:
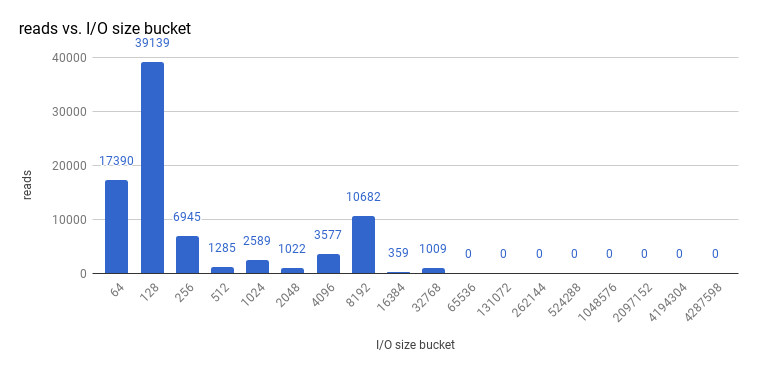
OpenShift Container Platform で etcd をプロファイリングした後に、etcd は少量のストレージインプットおよびアウトプットを頻繁に実行しています。SSD など、少量の読み取り/書き込み操作をすばやく処理するストレージで etcd を使用することを強く推奨します。
etcd 3.1 の 3 ノードクラスター (quorum reads を有効にしてストレージ v3 モードを使用) で実行したサイズ I/O 操作を確認してみると、読み取りサイズは以下のようになります。
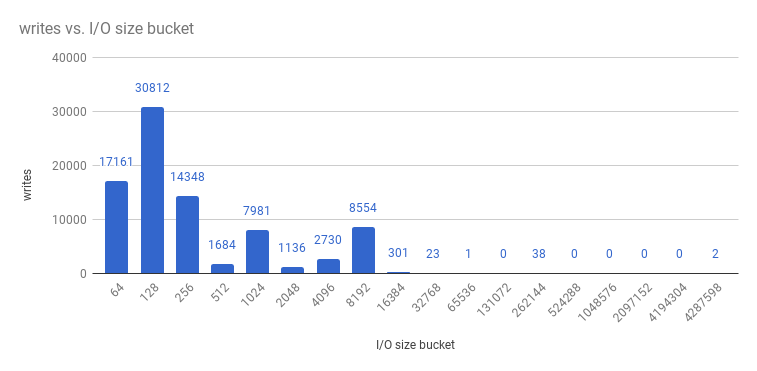
また、書き込みサイズは以下のようになります。
etcd プロセスは通常はメモリー集約型であり、マスター/ API サーバープロセスは CPU 集約型です。これらは、単一マシンや仮想マシン内で共同設置する上で有効なペアになります。etcd とマスターホスト間の通信を最適化するには、同じホストにマスターと etcd を共同設置するか、専用のネットワークを設定します。
3.3.1. OpenStack で PCI パススルーを使用した etcd ノードへのストレージ提供
大規模な環境で etcd を安定させるために etcd ノードにストレージをすばやく提供するには、NVMe (Non-Volatile Memory express) デバイスを直接 etcd ノードに渡す PCI パススルーを使用します。これを Red Hat OpenStack 11 以降で設定するには、PCI デバイスが存在する OpenStack コンピュートノードで以下を実行してください。
- Intel Vt-x が BIOS で有効化されているようにします。
-
IOMMU (Input-Output Memory Management Unit) を有効化します。/etc/sysconfig/grub ファイルで、
GRUB_CMDLINX_LINUXの行末に、引用符で囲ってintel_iommu=on iommu=ptを追加します。 以下を実行して /etc/grub2.cfg を再生成します。
$ grub2-mkconfig -o /etc/grub2.cfg- システムを再起動します。
コントローラーの /etc/nova.conf を以下のように設定します。
[filter_scheduler] enabled_filters=RetryFilter,AvailabilityZoneFilter,RamFilter,DiskFilter,ComputeFilter,ComputeCapabilitiesFilter,ImagePropertiesFilter,ServerGroupAntiAffinityFilter,ServerGroupAffinityFilter,PciPassthroughFilter available_filters=nova.scheduler.filters.all_filters [pci] alias = { "vendor_id":"144d", "product_id":"a820", "device_type":"type-PCI", "name":"nvme" }-
コントローラーで
nova-apiとnova-schedulerを再起動します。 コンピュートノードの /etc/nova/nova.conf で以下のように設定します。
[pci] passthrough_whitelist = { "address": "0000:06:00.0" } alias = { "vendor_id":"144d", "product_id":"a820", "device_type":"type-PCI", "name":"nvme" }パススルーする NVMe デバイスの
address、vendor_idおよびproduct_idの必須値を取得するには、以下を実行します。# lspci -nn | grep devicename-
コンピュートノードで
nova-computeを再起動します。 - 実行する OpenStack バージョンで NVMe を使用するように設定し、etcd ノードで起動します。
3.4. Tuned プロファイルを使用したホストのスケーリング
Tuned は、Red Hat Enterprise Linux (RHEL) および他の Red Hat 製品で有効な Tuning プロファイルの配信メカニズムです。Tuned は、sysctls、電源管理、カーネルコマンドラインオプションなどの Linux の設定をカスタマイズして、異なるワークロードのパフォーマンスやスケーラビリティーの要件に対応するために、オペレーティングシステムを最適化します。
OpenShift Container Platform は tuned デーモンを活用して、openshift、openshift-node および openshift-control-plane と呼ばれる Tuned プロファイルを追加します。これらのプロファイルは、カーネルで一般的に発生する垂直スケーリングの上限を安全に増やし、インストール時に自動的にシステムに適用されます。
Tuned プロファイルは、プロファイル間の継承や、プロファイルが仮想環境で使用されるかどうかにより、親プロファイルを選択する親の自動割り当て機能もサポートします。openshift プロファイルは、openshift-node と openshift-control-plane プロファイルの親で、これらの両機能を使用します。OpenShift Container Platform アプリケーションノードとコントロールプレーンノードの両方に関連するチューニングが含まれます。openshift-node および openshift-control-plane プロファイルは、アプリケーションおよびコントロールプレーンノードにそれぞれ設定されます。
openshift プロファイルがプロファイル階層の親である場合に、OpenShift Container Platform システムに配信されるチューニングは、ベアメタルホスト向けの throughput-performance (RHEL のデフォルト) と、RHEL 向けの virtual-guest または RHEL Atomic Host ノード向けの atomic-guest を組み合わせて作成されます。
お使いのシステムでどの Tuned プロファイルが有効になっているかを確認するには以下を実行します。
# tuned-adm active
Current active profile: openshift-nodeTuned に関する詳細情報は、『Red Hat Enterprise Linux パフォーマンスチューニングガイド』を参照してください。
第4章 コンピュートリソースの最適化
4.1. オーバーコミット
CPU およびメモリーなどのリソースを必要とするクラスターの部分から、このようなリソースにアクセスしやすくなるように、オーバーコミットの手順を使用します。
オーバーコミットすると、別のアプリケーションが必要としているリソースを必要な時にアクセスできなくなってしまうリスクがあり、結果的にパフォーマンスが低下しますが、パフォーマンスが低下する代わりに、密度が高まり、コストが削減されるので、代償として妥当な範囲である場合もあります。たとえば、開発、品質保証 (QA) またはテスト環境でオーバーコミットできても、実稼働環境ではできないなどです。
OpenShift Container Platform は、コンピュートリソースモデルやクォータシステムでリソース管理を実装します。詳しい情報は、「OpenShift リソースモデル」を参照してください。
オーバーコミットに関する詳細情報およびストラテジーは、『クラスター管理ガイド』の「オーバーコミット」を参照してください。
4.2. イメージの留意事項
4.2.1. 事前デプロイ済みのイメージを使用した効率の強化
効率の強化や全ノードホストでの設定の一貫性の維持、反復タスクの削減を図るため、複数のタスクを組み込んだベースの OpenShift Container Platform イメージを作成できます。これは、事前デプロイ済みのイメージとして知られています。
たとえば、Pod を実行するために、すべてのノードには ose-pod イメージが必要なので、各ノードは定期的に Docker レジストリーに接続して最新のイメージをプルする必要があります。100 のノードが同時にレジストリーに接続し、最新のイメージをプルしようとすると問題が発生する場合があり、イメージレジストリーでのリソースの競合や、ネットワーク帯域幅の無駄な使用、および Pod の起動にかかる時間の増加などが生じる可能性があります。
事前にデプロイ済みのイメージをビルドするには、以下を実行します。
- 必要とされるタイプおよびサイズのインスタンスを作成します。
- コンテナー用の永続ボリュームとは別に、専用のストレージデバイスが Docker のローカルイメージやコンテナーストレージで利用できるようにします。
- システムを完全に更新すると共に、Docker がインストールされていることを確認します。
- ホストがすべての yum リポジトリーにアクセスできるようにします。
- シンプロビジョニングされた LVM ストレージを設定します。
- 一般的に使用するイメージ (rhel7 ベースイメージ) および OpenShift Container Platform インフラストラクチャーコンテナーイメージ (ose-pod、ose-deployer など) を事前にデプロイ済みのイメージに事前に設定します。
OpenStack または AWS で実行できるなど、事前デプロイ済みのイメージが適切なクラスター設定やその他のクラスター設定用に設定されていることを確認します。
4.2.2. イメージの事前プル
イメージを効率的に生成するには、全ノードホストに、必要とされるコンテナーイメージをすべてのノードホストに事前にプルしておきます。これは、最初にイメージをプルする必要がないことを意味するため、サイズが大きくなる可能性のある S2I、メトリクス、ロギングなどのイメージの場合などに、接続速度が遅いことが原因でパフォーマンスが低下することなく、時間を節約できます。
また、この方法はセキュリティー上の理由でレジストリーにアクセスできないマシンにも役立ちます。
または、指定したデフォルトレジストリーではなく、ローカルイメージを使用できます。このためには、以下を実行します。
-
Pod 設定の
imagePullPolicyパラメーターをIfNotPresentまたはNeverに設定して、ローカルイメージからプルします。 - クラスターのすべてのノードで、同じイメージがローカルに保存されていることを確認します。
ノードの設定を制御できる場合は、ローカルレジストリーからプルすることが適切ですが、GCE など、自動的にノードを交換しないクラウドプロバイダーでは確実に機能しない場合があります。Google Container Engine (GKE) で実行している場合は、各ノードに、Google Container Registry の認証情報が設定された .dockercfg ファイルが配置されています。
4.3. RHEL ツールのコンテナーイメージを使用したデバッグ
Red Hat は rhel-tools コンテナーイメージを配信します。これは、スケーリングがパフォーマンスの問題のデバッグをサポートするパッケージツールです。このコンテナーイメージを使用すると、以下が可能です。
- ベースのディストリビューションからこのサポートコンテナーにパッケージを移動して、フットプリントが最小のコンテナーホストをデプロイできます。
- 不変のパッケージツリーを含む Red Hat Enterprise Linux 7 Atomic Host 用のデバッグ機能が提供されます。rhel-tools には、tcpdump、sosreport、git、gdb、perf など、多くの一般的なシステム管理ユーティリティーが含まれます。
以下を実行して rhel-tools コンテナーを使用します。
# atomic run rhel7/rhel-tools詳しい情報は、「RHEL ツールコンテナーのドキュメント」を参照してください。
4.4. Ansible ベースのヘルスチェックを使用したデバッグ
追加のヘルスチェックは、OpenShift Container Platform クラスターのインストールおよび管理に使用するAnsible ベースのツールで利用できます。このヘルスチェックでは、現行の OpenShift Container Platform インストールによくあるデプロイメントの問題を報告します。
これらのチェックは、ansible-playbook コマンドの使用 (クラスターインストールで使用されるのと同じ方式) によるか、または openshift-ansible の コンテナー化されたバージョンとして実行できます。ansible-playbook 方式については、チェックは atomic-openshift-utils RPM パッケージを使って行われます。コンテナー化方式の場合は、openshift3/ose-ansible コンテナーイメージが Red Hat Container Registry 経由で配布されます。
利用可能なヘルスチェックや使用例については、『クラスター管理ガイド』の「Ansible ベースのヘルスチェック」を参照してください。
第5章 永続ストレージの最適化
5.1. 概要
ストレージを最適化すると、全リソースでストレージの使用を最小限に抑えることができます。管理者は、ストレージを最適化することで、既存のストレージリソースが効率的に機能できるようにすることができます。
本ガイドでは、永続ストレージの最適化に重点を置いています。Pod の有効期間に使用されるデータ向けのローカルの一時ストレージのオプションは少なくなります。一時ストレージは、一時ストレージのテクノロジープレビューを有効化した場合のみ利用できます。この機能はデフォルトでは無効になっています。詳細情報は、「一時ストレージの設定」を参照してください。
5.2. 一般的なストレージガイドライン
以下の表では、OpenShift Container Platform で利用可能な永続ストレージ技術を紹介します。
| ストレージタイプ | 説明 | 例 |
|---|---|---|
|
ブロック |
|
コンバージドモード/インデペンデントモード GlusterFS [a] iSCSI、Fibre Channel、Ceph RBD、OpenStack Cinder、AWS EBS [a]、Dell/EMC Scale.IO、VMware vSphere Volume、GCE 永続ディスク[a]、Azure Disk |
|
ファイル |
|
コンバージドモード/インデペンデントモード GlusterFS [a]、RHEL NFS、NetApp NFS [b]、Azure File、Vendor NFS、Vendor GlusterFS [c]、Azure File、AWS EFS |
|
オブジェクト |
|
コンバージドモード/インデペンデントモード GlusterFS [a]、Ceph Object Storage (RADOS Gateway)、OpenStack Swift、Aliyun OSS、AWS S3、Google Cloud Storage、Azure Blob Storage、Vendor S3 [c]、Vendor Swift [c] |
[a]
コンバージドモード/インデペンデントモード GlusterFS、Ceph RBD、OpenStack Cinder、AWS EBS、Azure Disk、GCE 永続ディスク、および VMware vSphere は、OpenShift Container Platform で永続ボリューム (PV) の動的プロビジョニングをネイティブにサポートします。
[b]
NetApp NFS は Trident プラグインを使用する場合に動的 PV のプロビジョニングをサポートします。
[c]
Vendor GlusterFS、Vendor S3 および Vendor Swift のサポート機能および設定機能は異なる場合があります。
| ||
OpenShift Container Platform 3.6.1 では、コンバージドモード GlusterFS (ハイパーコンバージドまたはクラスターホストのストレージソリューション) およびインデペンデントモード GlusterFS (外部ホストのストレージソリューション) を、OpenShift Container Platform レジストリー、ロギング、メトリクス用のブロック、ファイルおよびオブジェクトストレージのインターフェースに使用できます。
5.3. ストレージの推奨事項
以下の表では、特定の OpenShift Container Platform クラスターアプリケーション向けに設定可能な推奨のストレージ技術についてまとめています。
| ストレージタイプ | ROX [a] | RWX [b] | レジストリー | スケーリングされたレジストリー | メトリクス | ロギング | アプリ |
|---|---|---|---|---|---|---|---|
|
ブロック |
はい [c] |
いいえ |
設定可能 |
設定不可 |
推奨 |
推奨 |
推奨 |
|
ファイル |
はい [c] |
はい |
設定可能 |
設定可能 |
設定可能 |
設定可能 |
推奨 |
|
オブジェクト |
はい |
はい |
推奨 |
推奨 |
設定不可 |
設定不可 |
設定不可 [d] |
[a]
ReadOnlyMany
[b]
ReadWriteMany
[c]
これは、物理ディスク、VM 物理ディスク、VMDK、NFS 経由のループバック、AWS EBS および Azure Disk には該当しません。
[d]
オブジェクトストレージは、OpenShift Container Platform の PV/永続ボリューム要求 (PVC: Persistent Volume Claim) で消費されません。アプリは、オブジェクトストレージの REST API と統合する必要があります。
| |||||||
スケーリングされたレジストリーとは、3 つ以上の Pod レプリカが稼働する OpenShift Container Platform レジストリーのことです。
5.3.1. 特定アプリケーションのストレージの推奨事項
5.3.1.1. レジストリー
スケーリングなし/高可用性 (HA) ではない OpenShift Container Platform レジストリークラスターのデプロイメント:
- 推奨されるストレージ技術はオブジェクトストレージであり、次はブロックストレージです。ストレージ技術は、RWX アクセスモードをサポートする必要はありません。
- ストレージ技術は、リードアフターライト (Read-After-Write) の一貫性を確保する必要があります。NAS ストレージ (オブジェクトストレージインターフェースを使用するのでコンバージドモード/インデペンデントモード GlusterFS 以外) は、実稼働環境のワークロードがある OpenShift Container Platform レジストリークラスターデプロイメントには推奨しません。
-
hostPathボリュームは、スケーリングなし/非 HA の OpenShift Container Platform レジストリー用に設定可能ですが、クラスターデプロイメントには推奨しません。
Red Hat のテスト時に、NFS (RHEL 上) をレジストリーのストレージバックエンドとして使用する場合の問題が確認されました。そのため、(RHEL 上で) NFS をレジストリーのストレージバックエンドとして使用することは推奨していません。
市場で提供されている他の NFS の実装には Red Hat のテスト時に確認された問題がない可能性があります。実施された可能性のあるテストに関する詳細情報は、個別の NFS 実装ベンダーにお問い合わせください。
5.3.1.2. スケーリングされたレジストリー
スケーリングされた/高可用性 (HA) の OpenShift Container Platform レジストリーのクラスターデプロイメント:
- 推奨されるストレージ技術はオブジェクトストレージです。ストレージ技術は、RWX アクセスモードをサポートし、リードアフターライトの一貫性を確保する必要があります。
- 実稼働環境のワークロードを処理するスケーリングされた/HA の OpenShift Container Platform レジストリークラスターのデプロイメントには、ファイルストレージやブロックストレージは推奨しません。
- すべての NAS ストレージ (オブジェクトストレージインターフェースを使用するので コンバージドモード/インデペンデントモード GlusterFS 以外) は、実稼働環境のワークロードがある OpenShift Container Platform レジストリーのクラスターデプロイメントには推奨しません。
Red Hat のテスト時に、NFS (RHEL 上) をレジストリーのストレージバックエンドとして使用する場合の問題が確認されました。そのため、(RHEL 上で) NFS をレジストリーのストレージバックエンドとして使用することは推奨していません。
市場で提供されている他の NFS の実装には Red Hat のテスト時に確認された問題がない可能性があります。実施された可能性のあるテストに関する詳細情報は、個別の NFS 実装ベンダーにお問い合わせください。
5.3.1.3. メトリクス
OpenShift Container Platform がホストするメトリクスのクラスターデプロイメント:
- 推奨されるストレージ技術はオブジェクトストレージです。
- NAS ストレージ (iSCSI からのオブジェクトストレージインターフェースを使用するのでコンバージドモード/インデペンデントモード GlusterFS 以外) は、実稼働環境のワークロードがあるホスト型のメトリクスクラスターデプロイメントには推奨しません。
実稼働環境のワークロードを処理するホスト型のメトリクスを、NFS を使用してバックアップすると、データが破損してしまう可能性があります。
5.3.1.4. ロギング
OpenShift Container がホストするロギングのクラスターデプロイメント:
- 推奨されるストレージ技術はオブジェクトストレージです。
- NAS ストレージ (iSCSI からのオブジェクトストレージインターフェースを使用するのでコンバージドモード/インデペンデントモード GlusterFS 以外) は、実稼働環境のワークロードがあるホスト型のメトリクスクラスターデプロイメントには推奨しません。
実稼働環境のワークロードを処理するホスト型のロギングを、NFS を使用してバックアップすると、データが破損してしまう可能性があります。
5.3.1.5. アプリケーション
以下の例で説明されているように、アプリケーションのユースケースはアプリケーションごとに異なります。
- 動的な PV プロビジョニングをサポートするストレージ技術は、マウント時のレイテンシーが低く、ノードに関連付けられておらず、正常なクラスターをサポートします。
- NFS はリードアフターライト (Read-After-Write) の一貫性を確保しないので、一貫性を確保する必要のあるアプリケーションには推奨していません。
- 同じ共有 NFS エクスポートに書き込みをする必要のあるアプリケーションは、実稼働環境のワークロードがかかると問題が発生する可能性があります。
5.3.2. 特定のアプリケーションおよびストレージの他の推奨事項
- OpenShift Container Platform Internal etcd: etcd の信頼性を最も高く保つには、一貫してレイテンシーが最も低くなるストレージ技術が推奨されます。
- OpenStack Cinder: OpenStack Cinder は ROX アクセスモードのユースケースで適切に機能する傾向にあります。
- データベース: データベース (RDBMS、NoSQL DB など) は、専用のブロックストレージで最適に機能する傾向にあります。
5.4. グラフドライバーの選択
コンテナーのランタイムは、イメージとコンテナーを DeviceMapper および OverlayFS などのグラフドライバー (プラグ可能なストレージ技術) に保存します。それぞれに長所と短所があります。
サポート内容や使用方法の注意点など、OverlayFS に関する詳しい情報は、『Red Hat Enterprise Linux (RHEL) 7 リリースノート』を参照してください。
| 名前 | 説明 | 利点 | 制限 |
|---|---|---|---|
|
デバイスマッパー loop-lvm |
デバイスマッパーのシンプロビジョニングモジュール (dm-thin-pool) を使用して、copy-on-write (CoW) スナップショットを実装します。デバイスマッパーグラフの場所ごとに、2 つのブロックデバイス (データとメタデータ用) をベースにシンプールが作成されます。デフォルトでは、これらのブロックデバイスは、自動作成されるスパースファイルのループバックマウントを使用して、自動的に作成されます。 |
カスタマイズなしですぐに使用できるので、プロトタイプ化や開発の目的で役立ちます。 |
|
|
デバイスマッパーのシンプロビジョニング |
LVM、デバイスマッパー、dm-thinp カーネルモジュールを使用します。ループバックデバイスを削除して、ローパーティション (ファイルシステムなし) に直接移動する点が異なります。 |
|
|
|
OverlayFS |
下層 (親) および上層 (子) のファイルシステムと作業ディレクトリー (子と同じファイルシステム) を組み合わせます。下層のファイルシステムはベースイメージで、新規コンテナーを作成すると、差分が含まれる新しい上層ファイルシステムが作成されます。 |
|
POSIX に準拠しません。 |
サポート内容や使用方法の注意点など、OverlayFS に関する詳しい情報は、『Red Hat Enterprise Linux (RHEL) 7 リリースノート』を参照してください。
実稼働環境の場合、コンテナーイメージやコンテナーの root ファイルシステムストレージには、通常のブロックデバイス (ループデバイス以外) の上層に、論理ボリューム管理 (LVM) シンプールを使用することを推奨します。
ループデバイスを使用すると、パフォーマンスに影響がある可能性があります。そのまま使用を継続できますが、以下の警告メッセージがログに記録されます。
devmapper: Usage of loopback devices is strongly discouraged for production use.
Please use `--storage-opt dm.thinpooldev` or use `man docker` to refer to
dm.thinpooldev section.
ストレージの設定を容易にするには、docker-storage-setup ユーティリティーを使用して、設定の詳細の多くを自動化します。
Docker ストレージ専用に別のディスクドライブがある場合 (例: /dev/xvdb) には、以下を /etc/sysconfig/docker-storage-setup ファイルに追加します。
DEVS=/dev/xvdb VG=docker_vgdocker-storage-setupサービスを再起動します。# systemctl restart docker-storage-setup再起動後に、
docker-storage-setupで、docker_vgという名前のボリュームを設定して、シンプールの論理ボリュームを作成します。RHEL でのシンプロビジョニングに関するドキュメントは、『LVM 管理ガイド』で確認できます。新規作成したボリュームは、lsblkコマンドで表示します。# lsblk /dev/xvdb NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT xvdb 202:16 0 20G 0 disk └─xvdb1 202:17 0 10G 0 part ├─docker_vg-docker--pool_tmeta 253:0 0 12M 0 lvm │ └─docker_vg-docker--pool 253:2 0 6.9G 0 lvm └─docker_vg-docker--pool_tdata 253:1 0 6.9G 0 lvm └─docker_vg-docker--pool 253:2 0 6.9G 0 lvm注記シンプロビジョニングされたボリュームはマウントされず、ファイルシステムもないので (個別のコンテナーには XFS ファイルシステムがない)、
dfの出力には表示されません。Docker が LVM シンプールを使用していることを確認して、ディスク領域の使用状況をモニタリングするには、
docker infoコマンドを使用します。Pool Nameは、/etc/sysconfig/docker-storage-setup で指定したVGと同じです。# docker info | egrep -i 'storage|pool|space|filesystem' Storage Driver: devicemapper Pool Name: docker_vg-docker--pool Pool Blocksize: 524.3 kB Backing Filesystem: xfs Data Space Used: 62.39 MB Data Space Total: 6.434 GB Data Space Available: 6.372 GB Metadata Space Used: 40.96 kB Metadata Space Total: 16.78 MB Metadata Space Available: 16.74 MB
デフォルトでは、シンプールは下層のブロックデバイスの 40% を使用するように設定されています。ストレージを使用していくにつれ、LVM は自動的にプールを最大 100% まで拡張します。Data Space Total の値が下層の LVM デバイスの古サイズに一致しないのは、この理由によります。この自動拡張技術は、Red Hat Enterprise Linux と、単一パーティションのみを使用する Red Hat Atomic Host の両方で使用するストレージのアプローチを統合するために使用されてきました。
開発において、Red Hat ディストリビューションの Docker はループバックマウントが実行されたスパースファイルにデフォルト設定されています。お使いのシステムでループバックモードを使用しているかどうかを確認するには、以下を実行します。
# docker info|grep loop0
Data file: /dev/loop0Red Hat は、実稼働環境のワークロードを使用するシンプールモードでは DeviceMapper ストレージドライバーを使用することを強く推奨します。
Overlay は、Red Hat Enterprise Linux 7.2 の時点で、コンテナーランタイムのユースケースについてもサポートされ、起動時間の加速化、ページキャッシュ共有が可能になるため、全体的なメモリー使用率を下げて高密度化できる可能性があります。
5.4.1. SELinux で OverlayFS または DeviceMapper を使用する利点
OverlayFS ファイルシステムの主な利点は、同じノードでイメージを共有するコンテナー間で Linux ページキャッシュが共有される点です。OverlayFS のこの特性により、コンテナーの起動時の出入力 (I/O) が減り (数百ミリ秒単位でコンテナーの起動時間が短縮)、同様のイメージがノードで実行されている場合にメモリーの使用率が減少します。これらはいずれも、(ビルドファームなど) コンテナーのチャーンレートを高め、密度を最適化する場合や、イメージの内容に重複が多い環境などの多くの環境で利点があります。
シンプロビジョニングのデバイスがコンテナーごとに割り当てられるので、DeviceMapper ではページキャッシュの共有はできません。
DeviceMapper は、Red Hat Enterprise Linux のデフォルトの Docker ストレージ設定です。コンテナーストレージ技術としての OverlayFS の使用は評価中であり、今後のリリースで Red Hat Enterprise Linux を OverlayFS にデフォルトで移行することも検討中です。
5.4.2. Overlay と Overlay2 のグラフドライバーの比較
OverlayFS はユニオンファイルシステムの 1 つです。ファイルシステムの上に別のファイルシステムを重ねる (オーバーレイする) ことができます。変更は上層のファイルシステムに記録され、下層のファイルシステムは未変更のままになります。コンテナーや DVD-ROM などのファイルシステムイメージを複数のユーザーで共有でき、ベースのイメージは読み取り専用メディアに置かれます。
OverlayFS は、単一の Linux ホストで 2 つのディレクトリーに階層化し、それらを 1 つのディレクトリーとして表示します。これらのディレクトリーは階層と呼ばれ、統合プロセスはユニオンプロセスと呼ばれます。
OverlayFS は、2 つのグラフドライバー overlay または overlay2 のいずれかを使用します。Red Hat Enterprise Linux 7.2 の時点では、overlay グラフドライバーがサポートされるようになりました。Red Hat Enterprise Linux 7.4 時点で、overlay2 がサポートされるようになりました。Docker デーモン上の SELinux は、Red Hat Enterprise Linux 7.4 でサポートされるようになりました。サポート内容やご利用のヒントなど、お使いの RHEL バージョンでの OverlayFS の使用に関する情報は、『Red Hat Enterprise Linux リリースノート』を参照してください。
overlay2 ドライバーは、最大 128 個の 下層にある OverlayFS 階層をネイティブでサポートしますが、overlay ドライバーは下層の OverlayFS 階層 1 つでしか機能しません。この機能が原因で、overlay2 ドライバーの方が、docker build などの階層関連の Docker コマンドのパフォーマンスが優れており、サポートするファイルシステムで使用する inode が少なくなります。
overlay ドライバーは、下層にある単一の OverlayFS 階層で機能するので、複数の OverlayFS 階層として複数階層のイメージを実装できません。代わりに、各イメージ階層は、/var/lib/docker/overlay の配下に独自のディレクトリーとして実装されます。下層にある階層と共有されるデータを参照する場合には、スペース効率が配慮された方法としてハードリンクが使用されます。
Docker は inode の使用において効率が良いので、overlay ドライバーではなく、OverlayFS のある overlay2 ドライバーを使用することが推奨されています。
RHEL または CentOS で Overlay2 を使用するには、バージョン 3.10.0-693 以降のバージョンが必要です。
第6章 一時ストレージの最適化
6.1. 概要
このトピックは、OpenShift Container Platform 3.10 で一時ストレージのテクノロジープレビューを有効化した場合にのみ適用されます。この機能は、デフォルトでは無効になっています。この機能を有効にするには、「一時ストレージの設定」を参照してください。
テクノロジープレビューリリースは、Red Hat 製品のサービスレベルアグリーメント (SLA) ではサポートされておらず、機能的に完全でない可能性があり、Red Hat では実稼働環境での使用を推奨しません。テクノロジープレビュー機能は、近々発表予定の製品機能をリリースに先駆けてご提供することにより、お客様に機能性をテストしていただき、開発プロセス中にフィードバックをお寄せいただくことを目的としています。Red Hat テクノロジープレビュー機能のサポート対象範囲に関する詳しい情報は、「テクノロジプレビュー機能のサポート範囲」を参照してください。
Pod は、一時ファイルの保存などの内部操作に一時ストレージを使用します。この一時ストレージは、個別の Pod の有効期間より長くなることはなく、一時ストレージは Pod 全体で共有できません。
OpenShift Container Platform 3.10 よりも前のバージョンでは、一時ローカルストレージは、コンテナーの書き込み可能な階層、logs ディレクトリー、EmptyDir ボリュームを使用して Pod に公開されていました。ローカルストレージのアカウントや分離がないことに関連する問題として、以下の問題が含まれます。
- Pod は利用可能なローカルストレージのサイズを認識しない。
- Pod がローカルストレージを要求しても確実に割り当てられない可能性がある。
- ローカルストレージは Best Effort (ベストエフォート) のリソースである。
- Pod は他の Pod でローカルストレージが一杯になるとエビクトされる可能性があり、十分なストレージが回収されるまで新しい Pod は許可されない。
一時ストレージは同様に Pod に公開されていますが、Pod の一時ストレージの使用に対する要求や制限を実装する新たな方法が追加されています。
CRI-O をコンテナーランタイムとして使用し、ファイルベースロギングをロギングに使用している場合にのみ、コンテナーログの管理は該当します。
一時ストレージはシステム内の Pod すべてで共有され、OpenShift Container Platform には管理者およびユーザーが確立した要求や制限を超えるサービスを保証する仕組みはない点を理解することが重要です。たとえば、一時ストレージでは、スループット、秒ごとの I/O 操作またはストレージパフォーマンスについての保証は一切ありません。
6.2. 一般的なストレージガイドライン
ノードのローカルストレージは、プライマリーパーティションとセカンダリーパーティションに分割できます。一時ローカルストレージには、プライマリーパーティションのみが使用できます。プライマリーパーティションでは、root とランタイムの 2 つがサポートされています。
Root
Root パーティションは、デフォルトで kubelet の root ディレクトリー
/var/lib/kubelet/と/var/log/ディレクトリーを保持します。このパーティションを Pod、オペレーティングシステム、OpenShift Container Platform システムデーモンの間で共有できます。Pod は、EmptyDir ボリューム、コンテナーログ、イメージ階層、コンテナーの書き込み可能階層を使用してこのパーティションにアクセスできます。OpenShift Container Platform は、このパーティションの共有アクセスと分離を管理します。ランタイム
ランタイムパーティションは、オーバーレイファイルシステムに使用可能なオプションのパーティションです。OpenShift Container Platform は、このパーティションの分離および共有アクセスを特定して提供します。このパーティションには、コンテナーイメージ階層と書き込み可能な階層が含まれます。ランタイムパーティションが存在する場合は、
rootパーティションにはイメージ階層も書き込み可能階層も含まれません。
第7章 ネットワークの最適化
7.1. ネットワークパフォーマンスの最適化
OpenShift SDN は OpenvSwitch、VXLAN (Virtual extensible LAN) トンネル、OpenFlow ルール、iptables を使用します。このネットワークは、ジャンボフレーム、ネットワークインターフェースカード (NIC) のオフロード、マルチキュー、ethtool の設定を使用してチューニングが可能です。
VXLAN は、4096 から 1600 万以上にネットワーク数が増え、物理ネットワーク全体で階層 2 の接続が追加されるなど、VLAN での利点が提供されます。これにより、異なるシステム上で実行されている場合でも、サービスの背後にある Pod すべてが相互に通信できるようになります。
VXLAN は、User Datagram Protocol (UDP) パケットにトンネル化されたトラフィックをすべてカプセル化しますが、CPU 使用率が上昇してしまいます。これらの外部および内部パケットは、移動中にデータが破損しないようにするために通常のチェックサムルールの対象になります。CPU パフォーマンスによっては、このように処理オーバーヘッドが増えることで、従来のオーバーレイ以外のネットワークと比べると、スループットが少なくなり、レイテンシーが増します。
クラウド、仮想マシン、ベアメタルの CPU パフォーマンスでは、1 Gbps をはるかに超えるネットワークスループットを処理できます。10 または 40 Gbps などの高い帯域幅のリンクを使用する場合には、パフォーマンスが低減する場合があります。これは、VXLAN ベースの環境では既知の問題で、コンテナーや OpenShift Container Platform 固有の問題ではありません。VXLAN トンネルに依存するネットワークも、VXLAN 実装により同様のパフォーマンスになります。
1 Gbps 以上にするには、以下を実行してください。
- ネイティブのコンテナールーティングの設定を使用する。このオプションには、ルーターでのルーティングテーブルの更新など、OpenShift SDN の使用時には存在しない重要な操作上の注意事項があります。
- Border Gateway Protocol (BGP) など、異なるルーティング技術を実装するネットワークプラグインを評価する。
- VXLAN オフロード対応のネットワークアダプターを使用します。VXLAN オフロードは、パケットのチェックサム計算と関連の CPU オーバーヘッドを、システムの CPU からネットワークアダプター上の専用のハードウェアに移動します。これにより、CPU サイクルが Pod やアプリケーションで使用できるように解放され、ユーザーはネットワークインフラストラクチャーの帯域幅全体を活用できるようになります。
VXLAN オフロードではレイテンシーは軽減されませんが、CPU 使用率はレイテンシーテストでも減少します。
7.1.1. ネットワークでの MTU の最適化
重要な Maximum Transmission Unit (MTU) が 2 つあります (ネットワークインターフェースカード (NIC) MTU と、SDN オーバーレイ MTU です)。
NIC MTU は、お使いのネットワークでサポートされる最大値以下でなければなりません。スループットを最適化する場合は、最大の値を選択するようにしてください。最も低いレイテンシーにおいて最適化するには、小さい値を選択します。
SDN オーバーレイの MTU は、最低でも NIC MTU より 50 バイト少なくなければなりません。これは、SDN オーバーレイのヘッダーに相当します。そのため、通常の Ethernet ネットワークでは、この値を 1450 に設定してください。ジャンボフレームの Ethernet ネットワークの場合は、これを 8950 に設定してください。
50 バイトのオーバーレイヘッダーは OpenShift SDN に関連します。他の SDN ソリューションの場合はこの値を若干変動させる必要があります。
MTU を設定するには、適切なノード設定マップを編集して、以下のセクションを変更します。
networkConfig:
mtu: 1450
networkPluginName: "redhat/openshift-ovs-subnet" OpenShift Container Platform SDN を構成するすべてのマスターおよび ノードで MTU サイズを変更する必要があります。また、tun0 インターフェースの MTU サイズはクラスターを構成するすべてのノードで同一である必要があります。
7.2. ネットワークサブネットの設定
OpenShift Container Platform は、Pod とサービスに対して IP アドレス管理を提供します。デフォルト値の許容範囲は以下のとおりです。
- 最大のクラスターサイズは 1024 ノード
- 1024 ノードごとに、/23 を割り当てる (Pod で利用可能な IP は 510 個)
- サービス用の IP アドレスは約 65,536 個
多くの場合、これらのネットワークはデプロイメント後に変更することができません。そのため、拡張についての計画が必要になります。
ネットワークのサイズ変更に関する制限は、「SDN の設定」に記載されています。
より大規模な環境を計画する場合は、Ansible インベントリーファイルの [OSE3:vars] セクションに以下の推奨値を設定するようにしてください。
[OSE3:vars]
osm_cluster_network_cidr=10.128.0.0/10これにより、使用可能な IP アドレス 510 個が割り当てられる 8192 ノードが許可されます。
インストールしているソフトウェアバージョンのノード/Pod の上限については、OpenShift Container Platform ドキュメントにあるサポートの制限について参照してください。
7.3. IPSec の最適化
ノードホストの暗号化、復号化に CPU 機能が使用されるので、使用する IP セキュリティーシステムにかかわらず、ノードのスループットおよび CPU 使用率の両方でのパフォーマンスに影響があります。
IPSec は、NIC に到達する前に IP ペイロードレベルでトラフィックを暗号化して、NIC オフロードに使用されてしまう可能性のあるフィールドを保護します。つまり、IPSec が有効な場合には、NIC アクセラレーション機能を使用できない場合があり、スループットの減少、CPU 使用率の上昇につながります。
第8章 ルーティングの最適化
8.1. OpenShift Container Platform HAProxy ルーターのスケーリング
8.1.1. ベースラインのパフォーマンス
OpenShift Container Platform「ルーター」は、宛て先が OpenShift Container Platform サービスの外部トラフィックすべてに対する受信ポイントとなります。
1 秒に処理される HTTP 要求について、単一の HAProxy ルーターのパフォーマンスを評価する場合に、パフォーマンスは、以下を含む多くの要因によって変動します。
- HTTP keep-alive/close モード
- ルートタイプ
- TLS セッション再開のクライアントサポート
- ターゲットルートごとの同時接続数
- ターゲットルート数
- バックエンドサーバーのページサイズ
- 基礎となるインフラストラクチャー (ネットワーク/SDN ソリューション、CPU など)
個別の環境でのパフォーマンスは異なりますが、ラボは、サイズが 4 vCPU/16GB RAM のパブリッククラウドインスタンスでテストします。単一の HAProxy ルーターは、ルート 100 個を処理し、1kB 静的ページに対応するバックエンドで終端されますが、以下を処理できます。
HTTP keep-alive モードのシナリオの場合:
| 暗号化 | 秒ごとの HTTP(s) 要求 |
|---|---|
|
なし |
22577 |
|
edge |
11642 |
|
passthrough |
33335 |
|
re-encrypt |
11521 |
HTTP close (keep-alive なし) のシナリオの場合:
| 暗号化 | 秒ごとの HTTP(s) 要求 |
|---|---|
|
なし |
5771 |
|
edge |
1780 |
|
passthrough |
3488 |
|
re-encrypt |
1248 |
TLS セッション再開は、暗号化ルートに使用されていました。HTTP keep-alive の場合は、単一の HAProxy ルーターがページサイズが 8kB でも、1 Gbit の NIC を飽和させることができます。
最新のプロセッサーが搭載されたベアメタルで実行する場合は、上記のパブリッククラウドインスタンスのパフォーマンスの約 2 倍のパフォーマンスになることを予想できます。このオーバーヘッドは、パブリッククラウドにある仮想化層により発生し、これは多くの場合、プライベートクラウドベースの仮想化にも適用できます。以下の表は、ルーターの背後で使用するアプリケーション数についてのガイドです。
| アプリケーション数 | アプリケーションタイプ |
|---|---|
|
5-10 |
静的なファイル/Web サーバーまたはキャッシュプロキシー |
|
100-1000 |
動的なコンテンツを生成するアプリケーション |
通常、HAProxy は使用する技術によって異なりますが、約 5-1000 のアプリケーションでルートの負荷分散を行うことができます。静的なコンテンツのみにサービスを提供するアプリケーションの場合は、この数字は通常少なくなります。
アプリケーションに対して、より多くのルートを提供し、ルーティング層の水平スケーリングを図る場合には、ルーターのシャード を使用する必要があります。
8.1.2. パフォーマンスの最適化
8.1.2.1. 最大接続数の設定
HAProxy のスケーラビリティーで最も重要でチューニング可能なパラメーターの 1 つに、maxconn パラメーターがあります。このパラメーターは、プロセス別の最大同時接続数を特定の値に設定します。このパラメーターを調節するには、OpenShift Container Platform HAProxy ルーターのデプロイメント設定ファイルにある ROUTER_MAX_CONNECTIONS 環境変数を編集してください。
接続にはフロントエンドおよび内部バックエンドが含まれます。これは 2 つの接続としてカウントされます。必ず ROUTER_MAX_CONNECTIONS の値を作成しようとしている接続数の 2 倍以上になるように設定してください。
8.1.2.2. CPU および割り込みアフィニティー
OpenShift Container Platform では、HAProxy ルーターは単一のプロセスのとして実行されます。OpenShift Container Platform HAProxy ルーターは通常、周波数が低く、数の多いコアを持つ対称型マルチプロセッシング (SMP) よりも、周波数が高く、数の少ないコアが搭載されたシステムでより優れたパフォーマンスを実現します。
HAProxy プロセスを 1 つの CPU コアに、また別の CPU コアにネットワーク割り込みをピニングすると、ネットワークパフォーマンスが向上する傾向にあります。同じ Non-Uniform Memory Access (NUMA) ノードにプロセスと割り込みを配置すると、共有 L3 キャッシュを確保してメモリーアクセスを回避しやすくなります。ただし、このレベルの制御は、パブリッククラウド環境では一般的に不可能です。ベアメタルホストでは、irqbalance は、割り込み要求線 (IRQ) があれば、自動的に PCI (peripheral component interconnect) ローカリティーと NUMA アフィニティーを処理します。クラウド環境では、このレベルの情報は一般的にオペレーティングシステムには提供されません。
CPU ピニングは taskset または HAProxy の cpu-map パラメーターを使用して実行されます。このディレクティブは、プロセス ID と CPU コア ID の 2 つの引数を取ります。たとえば、HAProxy プロセス 1 を CPU コア 0 にピニングするには、以下の行を HAProxy の設定ファイルの Global セクションに追加します。
cpu-map 1 0HAProxy 設定ファイルの変更については、「カスタマイズされた HAProxy ルーターのデプロイ」を参照してください。
8.1.2.3. バッファー増加の影響
OpenShift Container Platform HAProxy ルーター要求のバッファー設定で、アプリケーションからの受信要求や応答のヘッダーサイズを制限します。HAProxy パラメーター tune.bufsize を増やして、より大きいヘッダーを処理し、多くのパブリッククラウドプロバイダーが提供するロードバランサーで許可されるアプリケーションなど、非常に大きい cookie を使用するアプリケーションを機能させることができます。ただし、これにより、多数の接続が開放されている場合など、合計のメモリー使用率に影響があります。非常に多くの接続が開かれている場合には、メモリー使用率は、このチューニング可能なパラメーターの増加とほぼ比例します。
8.1.2.4. HAProxy 再読み込みの最適化
Websocket 接続などの長時間続く接続が、長いクライアント/サーバー HAProxy タイムアウトと短い HAProxy 再読み込み間隔と組み合わされると、HAProxy プロセスが多数インスタンス化されてしまう可能性があります。これらのプロセスは、HAProxy 設定が再読み込みされる前に開始されていた古い接続を処理する必要があります。これらの数多くのプロセスは、システムに不必要な負荷がかかり、メモリー不足の状態などの問題につながる可能性があるために理想的とは言えません。
この動作に影響を与えるルーターの環境変数は、特に ROUTER_DEFAULT_TUNNEL_TIMEOUT、ROUTER_DEFAULT_CLIENT_TIMEOUT、ROUTER_DEFAULT_SERVER_TIMEOUT および RELOAD_INTERVAL などです。
第9章 クラスターメトリクスのスケーリング
9.1. 概要
OpenShift Container Platform は、Heapster で収集してバックエンドに保存可能なメトリクスを公開します。OpenShift Container Platform の管理者は、1 つのユーザーインターフェースでコンテナーやコンポーネントメトリクスを表示できます。これらのメトリクスは、スケーリングのタイミングと方法を判断するために、Horizontal Pod Autoscaler でも使用されます。
以下のトピックでは、メトリクスコンポーネントのスケーリングに関する情報を提供します。
Hawkular および Heapster などのメトリクスコンポーネントの自動スケーリングは OpenShift Container Platform ではサポートされていません。
9.2. OpenShift Container Platform の推奨事項
- 専用の OpenShift Container Platform インフラストラクチャーノード でメトリクス Pod を実行する
-
メトリクスの設定時は永続ストレージを使用する。
USE_PERSISTENT_STORAGE=trueを設定します。 -
OpenShift Container Platform メトリクスデプロイメントで
METRICS_RESOLUTION=30パラメーターを保持する。METRICS_RESOLUTIONをデフォルト値の30よりも小さい値に設定することは推奨していません。Ansible メトリクスのインストール手順を使用する場合は、このパラメーターはopenshift_metrics_resolutionに置き換えてください。 - ホストメトリクス Pod が指定された OpenShift Container Platform ノードを詳しくモニタリングして、ホストシステムの容量不足 (CPU およびメモリー) を早い段階で検出する。このような容量不足により、メトリクス Pod で問題が発生する可能性があります。
- OpenShift Container Platform バージョン 3.7 のテストでは、最大 Pod 数 25,000 のテストケースが OpenShift Container Platform クラスターでモニタリングされました。
9.3. クラスターメトリクスの容量計画
210 および 990 の OpenShift Container Platform ノードで実施したテストでは、10500 および 11000 の Pod がそれぞれモニタリングされ、Cassandra データベースのサイズが、以下の表に記載の速度で増加しました。
| ノード数 | Pod 数 | Cassandra ストレージの増加速度 | 1 日あたりの Cassandra ストレージの増加速度 | 1 週間あたりの Cassandra ストレージの増加速度 |
|---|---|---|---|---|
|
210 |
10500 |
1 時間に 500 MB |
15 GB |
75 GB |
|
990 |
11000 |
1 時間に 1 GB |
30 GB |
210 GB |
上記の計算では、ストレージ要件が算出した値を超えないように、予想のサイズにオーバーヘッドとして約 20 % 追加しました。
METRICS_DURATION および METRICS_RESOLUTION の値がデフォルト (それぞれ 7 日と 15 秒) のままの場合は、上記の値にあるように、安全策として週ごとの Cassandra ストレージのサイズ要件を計画することができます。
OpenShift Container Platform メトリクスは、メトリクスデータのデータストアとして Cassandra データベースを使用するので、メトリクス設定のプロセスで USE_PERSISTENT_STORAGE=true に設定した場合には、NFS でネットワークストレージの上層に PV がデフォルトで配置されます。ただし、Cassandra ドキュメントにあるように、ネットワークストレージと、Cassandra を組み合わせて使用することは推奨していません。
9.4. OpenShift Container Platform メトリクス Pod のスケーリング
メトリクス Pod (Cassandra/Hawkular/Heapster) 1 セットでは、最低 25,000 の Pod をモニタリングできます。
OpenShift Container Platform メトリクス Pod が実行されるノードのシステムの負荷に注意してください。この情報を使用して、OpenShift Container Platform メトリクス Pod の数をスケールアウトし、複数の OpenShift Container Platform ノードに負荷を分散する必要があるかどうかを判断します。OpenShift Container Platform メトリクス heapster Pod のスケーリングは推奨していません。
9.4.1. 前提条件
OpenShift Container Platform メトリクスのデプロイに永続ストレージを使用した場合には、OpenShift Container Platform メトリクスの Cassandra Pod 数をスケーリングする前に、新規 Cassandra Pod が使用されるように、永続ボリューム (PV) を作成する必要があります。ただし、動的にプロビジョニングされる PV を使用して Cassandra がデプロイされた場合には、この手順は必要ありません。
9.4.2. Cassandra コンポーネントのスケーリング
Cassandra ノードは永続ストレージを使用するので、レプリケーションコントローラーでスケールダウンやスケールアップを実行することはできません。
Cassandra クラスターのスケーリングには、openshift_metrics_cassandra_replicas 変数を変更して、デプロイメント を再実行する必要があります。デフォルトでは Cassandra クラスターは単一ノードのクラスターとなっています。
OpenShift Container Platform メトリクスの hawkular pod を 2 つのレプリカにスケールアップするには、以下を実行します。
# oc scale -n openshift-infra --replicas=2 rc hawkular-metricsまたは、インベントリーファイルを更新して、デプロイメントを再実行します。
Cassandra クラスターに対して、新規ノードを追加したり、既存のノードを削除した場合は、クラスターに保存したデータの負荷がクラスター全体で再度分散されます。
スケールダウンを実行するには、以下を実行します。
コンテナーにリモートからアクセスする場合は、削除する Cassandra ノードに対して以下を実行します。
$ oc exec -it <hawkular-cassandra-pod> nodetool decommissionコンテナーにローカルでアクセスする場合には、代わりに以下を実行します。
$ oc rsh <hawkular-cassandra-pod> nodetool decommissionこのコマンドは、データをクラスター全体にコピーするので、実行にしばらく時間がかかります。停止の進捗状況は
nodetool netstats -Hでモニタリングできます。先のコマンドに成功すると、Cassandra インスタンスの
rcを0にスケールダウンします。# oc scale -n openshift-infra --replicas=0 rc <hawkular-cassandra-rc>これで Cassandra Pod が削除されます。
スケールダウンプロセスが完了し、既存の Cassandra ノードが予想どおりに機能する場合には、この Cassandra インスタンスと対応する Persistent Volume Claim (PVC、永続ボリューム要求) の rc も削除できます。PVC を削除すると、この Cassandra インスタンスに関連付けられているデータが完全に削除されるので、スケールダウンが完全かつ正常に完了しなかった場合に、失われたデータを復元することはできません。
第10章 クラスターの制限
10.1. 概要
以下のトピックでは、OpenShift Container Platform のオブジェクトの制限についてまとめています。
多くの場合、これらのしきい値を超えると、全体的にパフォーマンスが低下します。必ずしも、クラスターに障害が発生するわけではありません。
このトピックで紹介している制限によっては、最大限のクラスターを対象にしているものもあります。クラスターの規模が小さい場合には、制限も比例して少なくなります。
etcd バージョンやストレージデータ形式など、記載のしきい値に影響を与える要因は多数あります。
10.2. OpenShift Container Platform クラスターの制限
| 制限の種類 | 3.7 の制限 | 3.9 の制限 | 3.10 の制限 |
|---|---|---|---|
|
ノード数 [a] |
2,000 |
2,000 |
2,000 |
|
Pod 数 [b] |
120,000 |
120,000 |
150,000 |
|
250 |
250 |
250 | |
|
デフォルト値は 10 です。サポートしている最大値は、ノードごとの Pod 数と同じです。 |
デフォルト値は 10 です。サポートしている最大値は、ノードごとの Pod 数と同じです。 |
デフォルト値はありません。サポートしている最大値は、ノードごとの Pod 数と同じです。 | |
|
namespaces 数 |
10,000 |
10,000 |
10,000 |
|
ビルド数: パイプラインストラテジー |
該当なし |
10,000 (デフォルトの Pod: メモリー 512Mi) |
10,000 (デフォルトの Pod: メモリー 512Mi) |
|
namespace ごとの Pod 数[c] |
3,000 |
3,000 |
3,000 |
|
サービス数 [d] |
10,000 |
10,000 |
10,000 |
|
namespace ごとのサービス数 |
該当なし |
該当なし |
5,000 |
|
サービスごとのバックエンド数 |
5,000 |
5,000 |
5,000 |
|
namespace ごとのデプロイメント数[c] |
2,000 |
2,000 |
2,000 |
[a]
記載の制限を超えるクラスターはサポートされません。複数のクラスターに分割することを検討してください。
[b]
ここに記載の Pod 数は、テスト用の Pod 数です。実際の Pod 数は、アプリケーションのメモリー、CPU、ストレージ要件により異なります。
[c]
これは、状態の変更に対する対応として、特定の namespace にある全オブジェクトに対して反復する必要のある、システム内のコントロールループ数のことです。単一の namespace に特定タイプのオブジェクトの数が多くなると、ループのコストが上昇し、特定の状態変更を処理する速度が低下します。
[d]
iptables では、各サービスポートと各サービスのバックエンドに対応するエントリーが含まれます。特定のサービスのバックエンド数は、エンドポイントのオブジェクトサイズに影響があり、その結果、システム全体に送信されるデータサイズにも影響を与えます。
| |||
10.3. クラスターの制限に合わせた環境計画
ノードで物理リソースを過剰にサブスクライブすると、Kubernetes スケジューラーが Pod の配置時に行うリソース保証に影響を与えます。Swap メモリーを無効にするために実行できる処置について確認してください。
環境の計画時に、ノードに配置できる Pod の数を判断します。
クラスターごとの最大 Pod 数 / ノードごとの予想 Pod 数 = ノード数合計ノードで適合する Pod 数は、アプリケーション自体により異なります。アプリケーションのメモリー、CPU、ストレージ要件を検討してください。
シナリオ例
クラスターごとに 2200 の Pod を設定する場合に、ノードごとに最大 250 の Pod があることを前提として、最低でも 9 のノードが必要になります。
2200 / 250 = 8.8ノード数を 20 に増やす場合には、ノード配分がノードごとに 110 の Pod に変わります。
2200 / 20 = 11010.4. アプリケーション要件に合わせた環境計画
アプリケーション環境の例を考えてみましょう。
| Pod タイプ | Pod 数 | 最大メモリー | CPU コア | 永続ストレージ |
|---|---|---|---|---|
|
apache |
100 |
500MB |
0.5 |
1 GB |
|
node.js |
200 |
1 GB |
1 |
1 GB |
|
postgresql |
100 |
1 GB |
2 |
10GB |
|
JBoss EAP |
100 |
1 GB |
1 |
1 GB |
推定要件: CPU コア 550 個、メモリー 450GB およびストレージ 1.4TB
ノードのインスタンスサイズは、希望に応じて増減を調整できます。ノードのリソースはオーバーコミットされることが多く、デプロイメントシナリオでは、小さいノードで数を増やしたり、大きいノードで数を減らしたりして、同じリソース量を提供することもできます。運用上の敏捷性やインスタンスごとのコストなどの要因を考慮する必要があります。
| ノード種別 | 数量 | CPU | RAM (GB) |
|---|---|---|---|
|
ノード (オプション 1) |
100 |
4 |
16 |
|
ノード (オプション 2) |
50 |
8 |
32 |
|
ノード (オプション 3) |
25 |
16 |
64 |
アプリケーションによっては オーバーコミット の環境に適しているものもあれば、そうでないものもあります。たとえば、Java アプリケーションや、大きいページを使用するアプリケーションの多くは、オーバーコミットに対応できません。対象のメモリーは、他のアプリケーションに使用できません。上記の例では、環境は一般的な比率として約 30 % オーバーコミットされています。
第11章 クラスターローダーの使用
11.1. クラスターローダーの機能
クラスターローダーとは、クラスターに対してさまざまなオブジェクトを多数デプロイするツールであり、ユーザー定義のクラスターオブジェクトを作成します。クラスターローダーをビルド、設定、実行して、さまざまなクラスターの状態にある OpenShift Container Platform デプロイメントのパフォーマンスメトリクスを測定します。
11.2. クラスターローダーのインストール
クラスターローダーは atomic-openshift-tests パッケージに含まれます。これをインストールするには、以下を実行します。
$ yum install atomic-openshift-testsインストールが終わると、テスト用の実行ファイル extended.test は /usr/libexec/atomic-openshift/extended.test に配置されます。
11.3. クラスターローダーの実行
KUBECONFIG変数は、管理者kubeconfigの場所に設定します。$ export KUBECONFIG=${KUBECONFIG-$HOME/.kube/config}組み込まれているテスト設定を使用してクラスターローダーを実行し、5 つのテンプレートビルドをデプロイして、デプロイメントが完了するまで待ちます。
$ cd /usr/libexec/atomic-openshift/ ./extended.test --ginkgo.focus="Load cluster"または
--viper-configのフラグを追加して、ユーザー定義の設定でクラスターローダーを実行します。$ ./extended.test --ginkgo.focus="Load cluster" --viper-config=config/test1 - 1
- この例では、config/ というサブディレクトリーに test.yml ファイルが配置されています。コマンドラインでは、ファイルタイプと拡張子はツールが自動的に判断するので、設定ファイルを拡張子なしで実行します。
11.4. クラスターローダーの設定
複数のテンプレートや Pod を含む、namespaces (プロジェクト) を複数作成します。
クラスターローダーの設定ファイルを config/ サブディレクトリーに配置します。これらの設定ファイルで参照される Pod ファイルとテンプレートファイルは、content/ サブディレクトリーにあります。
11.4.1. 設定フィールド
| フィールド | 説明 |
|---|---|
|
|
|
|
|
1 つまたは多数の定義が指定されたサブオブジェクト。 |
|
|
設定ごとに 1 つの定義が指定されたサブオブジェクト。 |
|
|
設定ごとに 1 つの定義が指定されたオプションのサブオブジェクト。オブジェクト作成時に同期できるかどうかを追加します。 |
| フィールド | 説明 |
|---|---|
|
|
整数。作成するプロジェクト数の 1つの定義。 |
|
|
文字列。プロジェクトのベース名の定義。競合が発生しないように、同一の namespaces の数が |
|
|
文字列。オブジェクトに適用するチューニングセットの 1 つの定義。これは対象の namespace にデプロイします。 |
|
|
キーと値のペア一覧。キーは ConfigMap の名前で、値はこの ConfigMap の作成元のファイルへのパスです。 |
|
|
キーと値のペア一覧。キーはシークレットの名前で、値はこのシークレットの作成元のファイルへのパスです。 |
|
|
デプロイする Pod の 1 つまたは多数の定義を持つサブオブジェクト |
|
|
デプロイするテンプレートの 1 つまたは多数の定義を持つサブオブジェクト |
| フィールド | 説明 |
|---|---|
|
|
このフィールドは使用しません。 |
|
|
整数。デプロイする Pod またはテンプレート数。 |
|
|
文字列。プルが可能なリポジトリーに対する Docker イメージの URL。 |
|
|
文字列。作成するテンプレート (または Pod) のベース名の 1 つの定義。 |
|
|
文字列。ローカルファイルへのパス。作成する PodSpec またはテンプレートのいずれかです。 |
|
|
キーと値のペア。 |
| フィールド | 説明 |
|---|---|
|
|
文字列。チューニングセットの名前。プロジェクトのチューニングを定義する時に指定した名前と一致します。 |
|
|
Pod に適用される |
|
|
テンプレートに適用される |
| フィールド | 説明 |
|---|---|
|
|
サブオブジェクト。ステップ作成パターンでオブジェクトを作成する場合に使用するステップ設定。 |
|
|
サブオブジェクト。オブジェクト作成速度を制限するための速度制限チューニングセットの設定。 |
| フィールド | 説明 |
|---|---|
|
|
整数。オブジェクト作成を一時停止するまでに作成するオブジェクト数。 |
|
|
整数。 |
|
|
整数。オブジェクト作成に成功しなかった場合に失敗するまで待機する秒数。 |
|
|
整数。次の作成要求まで待機する時間 (ミリ秒)。 |
| フィールド | 説明 |
|---|---|
|
|
|
|
|
ブール値。 |
|
|
ブール値。 |
|
|
|
|
|
文字列。 |
11.4.2. クラスターローダー設定ファイルの例
クラスターローダーの設定ファイルは基本的な YAML ファイルです。
provider: local
ClusterLoader:
cleanup: true
projects:
- num: 1
basename: clusterloader-cakephp-mysql
tuning: default
templates:
- num: 1
file: ./examples/quickstarts/cakephp-mysql.json
- num: 1
basename: clusterloader-dancer-mysql
tuning: default
templates:
- num: 1
file: ./examples/quickstarts/dancer-mysql.json
- num: 1
basename: clusterloader-django-postgresql
tuning: default
templates:
- num: 1
file: ./examples/quickstarts/django-postgresql.json
- num: 1
basename: clusterloader-nodejs-mongodb
tuning: default
templates:
- num: 1
file: ./examples/quickstarts/nodejs-mongodb.json
- num: 1
basename: clusterloader-rails-postgresql
tuning: default
templates:
- num: 1
file: ./examples/quickstarts/rails-postgresql.json
tuningset:
- name: default
pods:
stepping:
stepsize: 5
pause: 0 s
rate_limit:
delay: 0 ms11.5. 既知の問題
IDENTIFIER パラメーターがユーザーテンプレートで定義されていない場合には、テンプレートの作成が error: unknown parameter name "IDENTIFIER" エラーで失敗します。テンプレートをデプロイする場合は、このエラーが発生しないように、以下のパラメーターをテンプレートに追加してください。
{
"name": "IDENTIFIER",
"description": "Number to append to the name of resources",
"value": "1"
}Pod をデプロイする場合は、このパラメーターを追加する必要はありません。
第12章 CPU マネージャーの使用
12.1. CPU マネージャーの機能
CPU マネージャーは、CPU グループを管理して、ワークロードを特定の CPU に制限します。
CPU マネージャーは、以下のような属性が考慮されるワークロードに役立ちます。
- できるだけ長い CPU 時間が必要な場合
- プロセッサーのキャッシュミスの影響を受ける場合
- レイテンシーが低いネットワークアプリケーションの場合
- 他のプロセスと連携し、単一のプロセッサーキャッシュを共有することに利点がある場合
12.2. CPU マネージャーの設定
CPU マネージャーを設定するには、以下を実行します。
オプションで、ノードにラベルを指定します。
# oc label node perf-node.example.com cpumanager=trueターゲットノードで CPU マネージャーのサポートを有効にします。
# oc edit configmap <name> -n openshift-node例:
# oc edit cm node-config-compute -n openshift-node ... kubeletArguments: ... feature-gates: - CPUManager=true cpu-manager-policy: - static cpu-manager-reconcile-period: - 5s kube-reserved:1 - cpu=500m # systemctl restart atomic-openshift-node- 1
kube-reservedは必須の設定です。この値は、環境に合わせて調整する必要があります。
コア 1 つまたは複数を要求する Pod を作成します。制限および要求の CPU の値は整数にする必要があります。これは、対象の Pod 専用のコアの数になります。
# cat cpumanager.yaml apiVersion: v1 kind: Pod metadata: generateName: cpumanager- spec: containers: - name: cpumanager image: gcr.io/google_containers/pause-amd64:3.0 resources: requests: cpu: 1 memory: "1G" limits: cpu: 1 memory: "1G" nodeSelector: cpumanager: "true"Pod を作成します。
# oc create -f cpumanager.yamlPod がラベル指定されたノードにスケジュールされていることを確認します。
# oc describe pod cpumanager Name: cpumanager-4gdtn Namespace: test Node: perf-node.example.com/172.31.62.105 ... Limits: cpu: 1 memory: 1G Requests: cpu: 1 memory: 1G ... QoS Class: Guaranteed Node-Selectors: cpumanager=true region=primarycgroupsが正しく設定されていることを確認します。一時停止プロセスの PID を取得します。# systemd-cgls -l ├─1 /usr/lib/systemd/systemd --system --deserialize 20 ├─kubepods.slice │ ├─kubepods-pod0ec1ab8b_e1c4_11e7_bb22_027b30990a24.slice │ │ ├─docker-b24e29bc4021064057f941dc5f3538595c317d294f2c8e448b5e61a29c026d1c.scope │ │ │ └─44216 /pauseQoS 階層
Guaranteedの Pod は、kubepods.sliceに配置されます。他の QoS の Pod は、kubepodsの子であるcgroupsに配置されます。# cd /sys/fs/cgroup/cpuset/kubepods.slice/kubepods-pod0ec1ab8b_e1c4_11e7_bb22_027b30990a24.slice/docker-b24e29bc4021064057f941dc5f3538595c317d294f2c8e448b5e61a29c026d1c.scope # for i in `ls cpuset.cpus tasks` ; do echo -n "$i "; cat $i ; done cpuset.cpus 2 tasks 44216対象のタスクで許可される CPU 一覧を確認します。
# grep ^Cpus_allowed_list /proc/44216/status Cpus_allowed_list: 2システム上の別の Pod (この場合は
burstableQoS 階層にあるPod) が、GuaranteedPod に割り当てられたコアで実行できないことを確認します。# cat /sys/fs/cgroup/cpuset/kubepods.slice/kubepods-burstable.slice/kubepods-burstable-podbe76ff22_dead_11e7_b99e_027b30990a24.slice/docker-da621bea7569704fc39f84385a179923309ab9d832f6360cccbff102e73f9557.scope/cpuset.cpus 0-1,3# oc describe node perf-node.example.com ... Capacity: cpu: 4 memory: 16266720Ki pods: 40 Allocatable: cpu: 3500m memory: 16164320Ki pods: 40 --- Namespace Name CPU Requests CPU Limits Memory Requests Memory Limits --------- ---- ------------ ---------- --------------- ------------- test cpumanager-4gdtn 1 (28%) 1 (28%) 1G (6%) 1G (6%) test cpumanager-hczts 1 (28%) 1 (28%) 1G (6%) 1G (6%) test cpumanager-r9wrq 1 (28%) 1 (28%) 1G (6%) 1G (6%) ... Allocated resources: (Total limits may be over 100 percent, i.e., overcommitted.) CPU Requests CPU Limits Memory Requests Memory Limits ------------ ---------- --------------- ------------- 3 (85%) 3 (85%) 5437500k (32%) 9250M (55%)この仮想マシンには、CPU コアが 4 基あります。
kube-reservedを 500 ミリコアに設定して、Node Allocatableの数になるように、ノードの全容量からコア の半分を引きます。Allocatable CPUが 3500 ミリコアであることを確認できます。これは、それぞれがコアを 1 つ受け入れるので、CPU マネージャー Pod の内 3 つを実行できるという意味になります。1 つのコア全体は、1000 ミリコアに相当します。4 つ目の Pod をスケジュールしようとすると、システムは Pod を受け入れますが、スケジュールはされません。
# oc get pods --all-namespaces |grep test test cpumanager-4gdtn 1/1 Running 0 8m test cpumanager-hczts 1/1 Running 0 8m test cpumanager-nb9d5 0/1 Pending 0 8m test cpumanager-r9wrq 1/1 Running 0 8m
第13章 Huge Page の管理
13.1. Huge Page の機能
メモリーは、ページと呼ばれるブロックで管理されます。多くのシステムでは、1 ページは 4Ki です。メモリー 1Mi は 256 ページに、メモリー 1Gi は 256,000 ページに相当します。CPU には、内蔵のメモリー管理ユニットがあり、ハードウェアでこのようなページリストを管理します。トランスレーションルックアサイドバッファー (TLB: Translation Lookaside Buffer) は、仮想から物理へのページマッピングの小規模なハードウェアキャッシュのことです。ハードウェアの指示で渡された仮想アドレスが TLB にあれば、マッピングをすばやく決定できます。そうでない場合には、TLB ミスが発生し、システムは速度が遅く、ソフトウェアベースのアドレス変換にフォールバックされ、パフォーマンスの問題が発生します。TLB のサイズが固定されているので、ページサイズを増やすしか、TLB ミスの割合を減らす方法はありません。
Huge Page とは、4Ki より大きいメモリーページのことです。x86_64 アーキテクチャーでは、2Mi と 1Gi の 2 つが一般的な Huge Page サイズです。別のアーキテクチャーではサイズは異なります。Huge Page を使用するには、アプリケーションが認識できるようにコードを書き込む必要があります。Transparent Huge Pages (THP) は、アプリケーションによる認識なしに、Huge Page の管理を自動化しようとしますが、制約があります。特に、ページサイズは 2Mi に制限されます。THP では、THP のデフラグが原因で、メモリー使用率が高くなり、断片化が起こり、パフォーマンスの低下につながり、メモリーページがロックされてしまう可能性があります。このような理由から、アプリケーションは THP ではなく、事前割り当て済みの Huge Page を使用するように設計 (また推奨) される場合があります。
OpenShift Container Platform では、Pod のアプリケーションが事前割り当て済みの Huge Page を割り当て、消費できます。以下のトピックでは、その方法について説明します。
13.2. 前提条件
- ノードは、Huge Page の容量をレポートできるように Huge Page を事前に割り当てる必要があります。ノードは、単一サイズの Huge Page のみを事前に割り当てることができます。
13.3. Huge Page の消費
Huge Page は、リソース名の hugepages-<size> を使用してコンテナーレベルのリソース要件で消費可能です。サイズは、特定のノードでサポートされる最もコンパクトなバイナリー表示 (整数値を使用) に置き換えます。たとえば、ノードが 2048KiB のページサイズをサポートする場合は、スケジュール可能なリソース hugepages-2Mi を公開します。CPU やメモリーとは異なり、Huge Page はオーバーコミットをサポートしません。
kind: Pod
metadata:
generateName: hugepages-volume-
spec:
containers:
- securityContext:
privileged: true
image: rhel7:latest
command:
- sleep
- inf
name: example
volumeMounts:
- mountPath: /hugepages
name: hugepage
resources:
limits:
hugepages-2Mi: 100Mi
volumes:
- name: hugepage
emptyDir:
medium: HugePages- 1
hugepagesのメモリー量は、実際に割り当てる量に指定します。この値は、ページサイズで乗算したhugepagesのメモリー量に指定しないでください。たとえば、Huge Page サイズが 2MB と仮定し、アプリケーションに Huge Page でバックアップする RAM 100 MB を使用する場合には、Huge Page は 50 に指定します。OpenShift Container Platform により、計算処理が実行されます。上記の例にあるように、100MBを直接指定できます。
プラットフォームによっては、複数の Huge Page サイズをサポートするものもあります。特定のサイズの Huge Page を割り当てるには、Huge Page の起動コマンドパラメーターの前に、Huge Page サイズの選択パラメーター hugepagesz=<size> を指定してください。<size> の値は、バイトで指定する必要があります。その際、オプションでスケールサフィックス [kKmMgG] を指定できます。デフォルトの Huge Page サイズは、default_hugepagesz=<size> の起動パラメーターで定義できます。詳しい情報は、「Huge Page および Transparent Huge Pages」を参照してください。
Huge Page 要求は制限と同じでなければなりません。制限が指定されているにもかかわらず、要求が指定されていない場合には、これがデフォルトになります。
Huge Page は、Pod のスコープで分割されます。コンテナーの分割は、今後のバージョンで予定されています。
Huge Page がサポートする EmptyDir ボリュームは、Pod 要求よりも多くの Huge Page メモリーを消費することはできません。
shmget() で SHM_HUGETLB を使用して Huge Page を消費するアプリケーションは、proc/sys/vm/hugetlb_shm_group に一致する補助グループで実行する必要があります。
第14章 GlusterFS ストレージでの最適化
14.1. データベースのコンバージドモードに関するガイド
アプリケーションにコンバージドモードを使用する場合には、お使いのワークロードの種類によって、gluster-block と GlusterFS モードを使い分けられるように、このトピックで説明されているガイドとベストプラクティスに従うようにしてください。
14.2. テスト済みのアプリケーション
OpenShift Container Platform 3.10 では、これらの SQL データベースを使用する場合および使用しない場合に関連して広範なテストが行われました。
- Postgresql SQL v9.6
- MongoDB noSQL v3.2
これらのデータベースのストレージは、コンバージドモードのストレージクラスターから取得しています。
Postgresql SQL ベンチマークについては、pgbench がデータベースのベンチマークに使用されていました。MongoDB noSQL ベンチマークについては、YCSB Yahoo! Cloud Serving Benchmark がベンチマークに使用され、workloada、workloadb、workloadf がテストされました。
14.3. サポート表
|
データベース |
ストレージバックエンド: GlusterFS |
off にするパフォーマンス変換 |
on にするパフォーマンス変換 |
|
Postgresql SQL |
はい |
|
|
|
MongoDB noSQL |
はい |
|
|
|
データベース |
ストレージバックエンド: gluster-block |
|
Postgresql |
はい |
|
MongoDB |
はい |
上述のように GlusterFS のパフォーマンス変換は、コンバージドモードの最新イメージで提供されるデータベースプロファイルにすでに含まれています。
14.4. テスト結果
Postgresql SQL データベースの場合は、GlusterFS と gluster-block のパフォーマンスはほぼ同じ結果となりました。MongoDB noSQL データベースの場合は、gluster-block のパフォーマンスの方が優れていたので、MongoDB noSQL データベースには、gluster-block ベースのストレージを使用してください。
Legal Notice
Copyright © Red Hat
OpenShift documentation is licensed under the Apache License 2.0 (https://www.apache.org/licenses/LICENSE-2.0).
Modified versions must remove all Red Hat trademarks.
Portions adapted from https://github.com/kubernetes-incubator/service-catalog/ with modifications by Red Hat.
Red Hat, Red Hat Enterprise Linux, the Red Hat logo, the Shadowman logo, JBoss, OpenShift, Fedora, the Infinity logo, and RHCE are trademarks of Red Hat, Inc., registered in the United States and other countries.
Linux® is the registered trademark of Linus Torvalds in the United States and other countries.
Java® is a registered trademark of Oracle and/or its affiliates.
XFS® is a trademark of Silicon Graphics International Corp. or its subsidiaries in the United States and/or other countries.
MySQL® is a registered trademark of MySQL AB in the United States, the European Union and other countries.
Node.js® is an official trademark of the OpenJS Foundation.
The OpenStack® Word Mark and OpenStack logo are either registered trademarks/service marks or trademarks/service marks of the OpenStack Foundation, in the United States and other countries and are used with the OpenStack Foundation’s permission. We are not affiliated with, endorsed or sponsored by the OpenStack Foundation, or the OpenStack community.
All other trademarks are the property of their respective owners.