ストレージデバイスの管理
ローカルおよびリモートのストレージデバイスの設定と管理
概要
- 要件に従ってディスクパーティションを作成します。ディスク暗号化を使用して、ブロックデバイス上のデータを保護します。
- RAID (Redundant Array of Independent Disks) を作成して、複数のドライブにデータを保存し、データ損失を回避します。
- iSCSI および NVMe over Fabrics を使用して、ネットワーク経由でストレージにアクセスします。
- 物理ストレージデバイスのプールを管理するように Stratis をセットアップします。
Red Hat ドキュメントへのフィードバック (英語のみ)
Red Hat は質の高いドキュメントを提供することに尽力しており、皆様からのフィードバックを大切にしています。改善にご協力いただくため、Red Hat Jira トラッキングシステムを通じてご提案やエラー報告をお寄せください。
手順
Jira の Web サイトにログインします。
アカウントがない場合、アカウント作成オプションを選択します。
- 上部のナビゲーションバーで Create をクリックします。
- Summary フィールドにわかりやすいタイトルを入力します。
- Description フィールドに、ドキュメントの改善に関するご意見を記入してください。ドキュメントの該当部分へのリンクも追加してください。
- ダイアログの下部にある Create をクリックします。
第1章 利用可能なストレージオプションの概要
RHEL 9 では、複数のローカル、リモート、およびクラスターベースのストレージオプションを利用できます。
ローカルストレージは、ストレージデバイスがシステムにインストールされているか、システムに直接接続されていることを意味します。
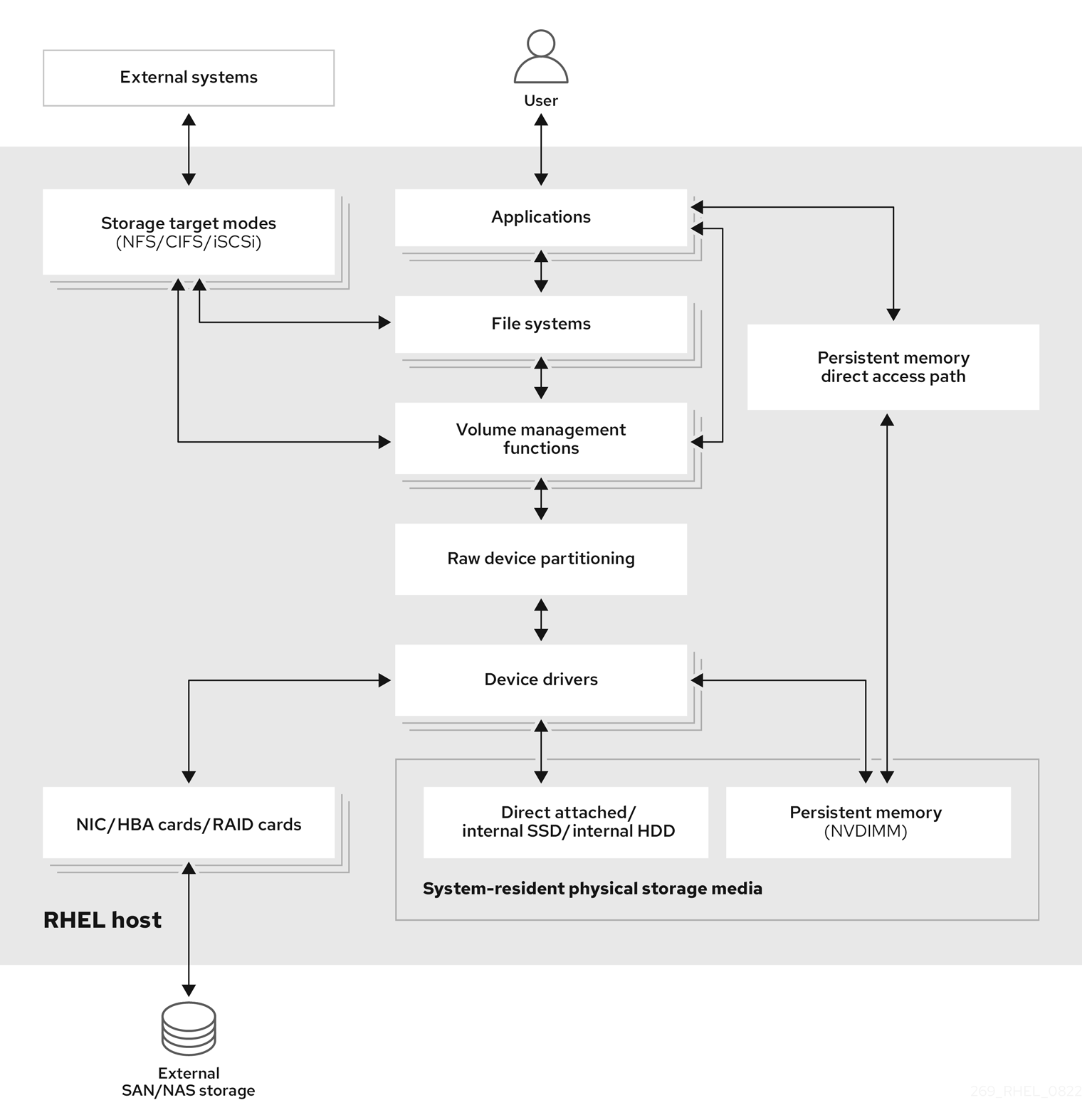
リモートストレージでは、LAN、インターネット、またはファイバーチャネルネットワークを介してデバイスにアクセスします。以下の Red Hat Enterprise Linux ストレージダイアグラムの概要では、さまざまなストレージオプションを説明します。
図1.1 Red Hat Enterprise Linux ストレージダイアグラム (概要)
1.1. ローカルストレージの概要
Red Hat Enterprise Linux 9 は、ローカルストレージオプションを複数提供します。
- 基本的なディスク管理:
partedとfdiskを使用して、ディスクパーティションの作成、変更、削除、および表示を行うことができます。パーティショニングレイアウトの標準は以下のようになります。- マスターブートレコード (MBR)
- BIOS ベースのコンピューターで使用されます。プライマリーパーティション、拡張パーティション、および論理パーティションを作成できます。
- GUID パーティションテーブル (GPT)
- Globally Unique Identifier (GUID) を使用し、一意のディスクおよびパーティション GUID を提供します。
- ストレージ使用オプション
- NVDIMM (Non-Volatile Dual In-line Memory Modules) の管理
- メモリーとストレージの組み合わせです。システムに接続した NVDIMM デバイスで、さまざまな種類のストレージを有効にして管理できます。
- ブロックストレージ管理
- 各ブロックに固有の識別子を持つブロックの形式でデータを保存します。
- ファイルストレージ
- データは、ローカルシステムのファイルレベルに保存されます。これらのデータは、XFS (デフォルト) または ext4 を使用してローカルでアクセスしたり、NFS と SMB を使用してネットワーク上でアクセスできます。
- 論理ボリューム
- 論理ボリュームマネージャー (LVM)
- 物理デバイスから論理デバイスを作成します。論理ボリューム (LV) は、物理ボリューム (PV) とボリュームグループ (VG) の組み合わせです。
- VDO (Virtual Data Optimizer)
重複排除、圧縮、およびシンプロビジョニングを使用して、データの削減に使用されます。VDO の下で論理ボリュームを使用すると、次のことができます。
- VDO ボリュームの拡張
- 複数のデバイスにまたがる VDO ボリューム
- ローカルファイルシステム
- XFS
- デフォルトの RHEL ファイルシステム。
- Ext4
- レガシーファイルシステム。
- Stratis
- Stratis は、高度なストレージ機能に対応する、ユーザーとカーネルのハイブリッドローカルストレージ管理システムです。
1.2. リモートストレージの概要
RHEL 9 で利用可能なリモートストレージオプションは次のとおりです。
- ストレージの接続オプション
- iSCSI
- RHEL 9 は targetcli ツールを使用して、iSCSI ストレージの相互接続を追加、削除、表示、および監視します。
- ファイバーチャネル (FC)
RHEL 9 は、以下のネイティブファイバーチャネルドライバーを提供します。
-
lpfc -
qla2xxx -
Zfcp
-
- NVMe (Non-volatile Memory Express)
ホストソフトウェアユーティリティーがソリッドステートドライブと通信できるようにするインターフェイス。NVMe over Fabrics を設定するには、次のタイプの fabric トランスポートを使用します。
- Remote Direct Memory Access (NVMe/RDMA) を使用する NVMe over Fabrics
- ファイバーチャネルを使用した NVMe over Fabrics (NVMe/FC)
- TCP を使用した NVMe over Fabrics (NVMe/TCP)
- Device Mapper Multipath (DM Multipath)
- サーバーノードとストレージアレイ間の複数の I/O パスを 1 つのデバイスに設定できます。これらの I/O パスは、個別のケーブル、スイッチ、コントローラーを含むことができる物理的な SAN 接続です。
- ネットワークファイルシステム
- NFS
- SMB
1.3. GFS2 ファイルシステムの概要
Red Hat Global File System 2 (GFS2) ファイルシステムは、64 ビットの対称クラスターファイルシステムで、共有名前空間を提供し、一般的なブロックデバイスを共有する複数のノード間の一貫性を管理します。GFS2 ファイルシステムは、ローカルファイルシステムに可能な限り近い機能セットを提供すると同時に、ノード間でクラスターの完全な整合性を強制することを目的としています。これを実現するため、ノードはファイルシステムリソースにクラスター全体のロックスキームを使用します。このロックスキームは、TCP/IP などの通信プロトコルを使用して、ロック情報を交換します。
場合によっては、Linux ファイルシステム API では、GFS2 のクラスター化された性質を完全に透過的にすることができません。たとえば、GFS2 で POSIX ロックを使用しているプログラムは、GETLK の使用を回避する必要があります。なぜなら、クラスター環境では、プロセス ID が、クラスター内の別のノードに対するものである可能性があるためです。ただし、ほとんどの場合、GFS2 ファイルシステムの機能は、ローカルファイルシステムのものと同じです。
Red Hat Enterprise Linux Resilient Storage Add-On は GFS2 を提供します。GFS2 が必要とするクラスター管理の提供は Red Hat Enterprise Linux High Availability Add-On により提供されます。
gfs2.ko カーネルモジュールは GFS2 ファイルシステムを実装し、GFS2 クラスターノードに読み込まれます。
GFS2 環境を最大限に利用するためにも、基礎となる設計に起因するパフォーマンス事情を考慮することが重要です。GFS2 では、ローカルファイルシステムと同様、ページキャッシュで、頻繁に使用されるデータのローカルキャッシングを行ってパフォーマンスを向上します。クラスターのノード間で一貫性を維持するために、glock ステートマシンでキャッシュ制御が提供されます。
第2章 永続的な命名属性
ストレージデバイスを識別および管理する方法により、システムの安定性と予測可能性が確保されます。RHEL 9 では、この目的のために、従来のデバイス名と永続的な命名属性という 2 つの主要な命名スキームを使用します。
従来のデバイス名
Linux カーネルは、システム内でのデバイスの表示順序または列挙に基づいて、従来のデバイス名を割り当てます。たとえば、通常、最初の SATA ドライブには /dev/sda というラベルが付けられ、2 番目の SATA ドライブには /dev/sdb というラベルが付けられます。これらの名前はわかりやすいですが、デバイスが追加または削除されたり、ハードウェア設定が変更されたり、システムが再起動されたりすると、変更される可能性があります。これにより、スクリプトと設定ファイルに問題が生じる可能性があります。さらに、従来の名前には、デバイスの目的や特性についての説明的な情報が欠けています。
永続的な命名属性
永続的な命名属性 (PNA) は、ストレージデバイスの固有の特性に基づいているため、システムに対して提示された際に、システムの再起動後もより安定して予測可能な名前付けが可能になります。PNA の主な利点の 1 つは、ハードウェア設定の変更に対する回復力であり、一貫した命名規則を維持するのに最適であることです。PNA を使用すると、予期しない名前の変更を心配することなく、スクリプト、設定ファイル、管理ツール内でストレージデバイスを参照できます。さらに、PNA には、ベンダー、モデル名、シリアル番号の組み合わせなどのデバイスタイプや製造元情報などの貴重なメタデータが含まれることが多く、効果的なデバイス識別と管理のための記述性が向上します。PNA は最終的に、個々のデバイスにアクセスするために /dev/disk ディレクトリーにデバイスリンクを作成するために使用されます。デバイスリンク名の構築および管理方法は、udev ルールによって決まります。
以下は /dev/disk/ にあるディレクトリーのリストです。
システムの再起動後もコンテンツが一意のままであるディレクトリー:
-
by-id:vendor/model/serial_string組み合わせを使用したハードウェア属性に基づきます。 -
by-path*: 物理的なハードウェアの配置に基づきます。マシンに物理的に接続されているデバイスまたはディスクの場合、これはマザーボード上のホストバスに物理的に接続されているスロットまたはポートです。ただし、ネットワーク経由で接続されたデバイスまたはディスクの場合、これにはネットワークアドレスの指定が含まれます。 -
by-partlabel: デバイスパーティションに割り当てられたラベルに基づきます。これらのラベルはユーザーによって割り当てられます。 -
by-partuuid: 自動生成されるUUID形式の一意の番号に基づきます。 -
by-uuid: 自動生成される UUID 形式の一意の番号に基づきます。
-
現在のシステム実行中は一意のままであるが、システムの再起動後は一意ではなくなるコンテンツを含むディレクトリー:
-
by-diskseq:diskseqは、システムの起動時に 1 から始まる 'disk sequence number' 番号です。この番号は新しく接続されたディスクに割り当てられ、その後の各ディスクには順番に次の番号が割り当てられます。システムを再起動すると、カウンターは 1 から再開されます。
-
ループデバイス専用に使用されるコンテンツを含むディレクトリー:
-
by-loop-ref -
by-loop-inode
-
2.1. ファイルシステムとブロックデバイスを識別するための永続属性
RHEL 9 のストレージでは、永続的な命名属性 (PNA) は、システムの再起動、ハードウェアの変更、またはその他のイベント全体にわたってストレージデバイスに一貫した信頼性の高い命名を提供するメカニズムです。これらの属性は、ストレージデバイスが追加、削除、または再設定された場合でも、一貫してストレージデバイスを識別するために使用されます。
PNA はファイルシステムとブロックデバイスの両方を識別するために使用されますが、目的は異なります。
- ファイルシステムを識別するための永続属性
ユニバーサル一意識別子 (UUID)
UUID は主に、ストレージデバイス上のファイルシステムを一意に識別するために使用されます。各ファイルシステムインスタンスには独自の UUID が自動的に割り当てられ、ファイルシステムがアンマウントや再マウントされたり、デバイスが切断されて再接続されたりしても、この識別子は一定のままです。
ラベル
ラベルは、ユーザーがファイルシステムに割り当てた名前です。これらはファイルシステムの識別と参照に使用できますが、UUID ほど標準化されていません。ファイルシステムラベルはユーザーが割り当てるため、その一意性はユーザーの選択によって決まります。ラベルは、設定ファイルでファイルシステムを指定するための UUID の代替としてよく使用されます。
ファイルシステムにラベルを割り当てると、そのラベルはファイルシステムのメタデータの一部になります。このラベルは、ファイルシステムがアンマウントや再マウントされたり、デバイスが切断されて再接続されたりしても、ファイルシステムに関連付けられたままになります。
- ブロックデバイスを識別するための永続属性
ユニバーサル一意識別子 (UUID)
UUID を使用してストレージブロックデバイスを識別できます。ストレージデバイスがフォーマットされると、多くの場合、デバイス自体に UUID が割り当てられます。このような UUID は通常、実際のデバイスが最下位レベルにある他のブロックデバイスの上に階層化された仮想ブロックデバイスに生成され、割り当てられます。たとえば、device-mapper (DM) ベースのデバイスと、論理ボリュームマネージャー (LVM) や暗号化などの関連サブシステムは、論理ボリューム UUID (LVUUID) や暗号化 UUID などの UUID を使用してデバイスを識別します。
また、multiple-device (MD) ベースのデバイスには UUID が割り当てられています。仮想デバイスは通常、基盤となるデバイスをコンポーネント UUID でマークします。たとえば、LVM は基盤となるデバイスを物理ボリューム UUID (PVUUID) でマークし、MD は基盤となるデバイスを MD コンポーネント UUID でマークします。
これらの UUID は仮想ブロックデバイスのメタデータ内に埋め込まれ、永続的な命名属性として使用されます。これにより、ブロックデバイス上に存在するファイルシステムを変更した場合でも、ブロックデバイスを一意に識別できるようになります。UUID はデバイスパーティションにも割り当てられます。
このような UUID は他のデバイス ID と共存できます。たとえば、デバイススタックの下部にある sda デバイスは、
vendor/model/serial_numberの組み合わせまたは WWID によって識別されますが、LVM によって割り当てられた PVUUID を持つこともできます。これは LVM 自体によって認識され、その上の層にボリュームグループ (VG) または論理ボリューム (LV) が構築されます。- ラベル、名前ラベル、または名前は、特定のブロックデバイスにも割り当てることができます。これは、ユーザーがラベルを割り当てることができるパーティションに適用されます。device-mapper (DM) ベースのデバイスや multiple-device (MD) ベースのデバイスなど、一部の仮想ブロックデバイスも、デバイスを識別するために名前を使用します。
World Wide Identifier (WWID)
WWID は、グローバルに一意であり、一般的にストレージブロックデバイスまたはストレージコンポーネントに関連付けられている識別子のファミリーを包含します。これらは、ファイバーチャネル (FC) などのエンタープライズレベルの Storage Area Network (SAN) で、ストレージノード (World Wide Node Name (WWNN)) またはノード上のストレージデバイスへの実際のポート/接続 (World Wide Port Name (WWPN)) を識別するためによく使用されます。WWID は、サーバーと SAN ストレージデバイス間の一貫した通信を実現し、ストレージデバイスへの冗長パスの管理に役立ちます。
NVME デバイスなど、他の種類のデバイスでも WWID の形式が使用される場合があります。これらのデバイスは、必ずしもネットワークまたは SAN 経由でアクセスする必要はなく、エンタープライズレベルのデバイスである必要もありません。
WWID 形式は単一の標準に従っていません。たとえば、SCSI では NAA、T10、EUI などの形式が使用されます。NVME は、EUI-64、NGUUID、UUID などの形式を使用します。
serial 文字列
serial 文字列は、製造元によって各ストレージブロックデバイスに割り当てられた一意の文字列識別子です。これはストレージデバイスを区別するために使用できます。また、デバイス管理のために UUID や WWID などの他の属性と組み合わせて使用することもできます。
udev rules内、つまり/dev/disk/by-idコンテンツ内では、'short serial string' は通常、デバイス自体によって報告される実際の serial 文字列を表します。一方、'serial string' は複数のコンポーネントで構成され、通常は<bus_type>-<vendor_name>_<model_name>_<short_serial_string>となります。実際のデバイスには WWID と serial 文字列が推奨されます。仮想デバイスの場合、UUID または名前が推奨されます。
2.2. udev デバイスの命名規則
ユーザー空間デバイスマネージャー (udev) サブシステムを使用すると、デバイスに永続的な名前を割り当てるためのルールを定義できます。これらのルールは、.rules 拡張子を持つファイルに保存されます。udev ルールを保存する主な場所は 2 つあります。
-
/usr/lib/udev/rules.d/ディレクトリーには、インストールされたパッケージに付属するデフォルトのルールが含まれています。 -
/etc/udev/rules.dディレクトリーはカスタムudevルール用です。
/usr/lib/udev/rules.d/ のルールが変更された場合、更新中にパッケージのルールファイルによって上書きされます。したがって、手動またはカスタムのルールは /etc/udev/rules.d に追加する必要があります。これらのルールは、明示的に削除されるまで保持されます。使用する前に、両方のディレクトリーの udev ルールがマージされます。/etc/udev/rules.d 内のルールが /usr/lib/udev/rules.d/ 内のルールと同じ名前である場合、前者のルールが優先されます。
これらのルールの目的は、システムの再起動後や設定の変更後も、ストレージデバイスが一貫して予測どおりに識別されるようにすることです。
udev ルールは、デバイスの追加、変更、または削除を通知する受信イベントに基づいて実行するアクションを定義します。これは、永続ストレージ属性の値を収集し、収集された情報に基づいて udev に /dev コンテンツを作成するように指示するのにも役立ちます。udev ルールは、キーと値のペアを使用して人間が読める形式で記述されます。
ストレージデバイスの場合、udev ルールは /dev/disk/ ディレクトリー内のシンボリックリンクの作成を制御します。これらのシンボリックリンクはストレージデバイスに使いやすいエイリアスを提供するため、これらのデバイスの参照と管理がより便利になります。
カスタムの udev ルールを作成して、シリアル番号、World Wide Name (WWN) 識別子、その他のデバイス固有の特性などのさまざまな属性に基づいてデバイスに名前を付ける方法を指定できます。特定の命名規則を定義することにより、システム内でデバイスを識別する方法を正確に制御できます。デバイスの特定のカスタムシンボリックリンクを/dev に作成するには、システムの udev(7) man ページを参照してください。
udev ルールは非常に柔軟ですが、udev の制限事項に注意することが重要です。
-
アクセス可能なタイミング: 一部のストレージデバイスは、
udevクエリー時にアクセスできない場合があります。 -
イベントベースの処理: カーネルはいつでも
udevイベントを送信できます。そのため、デバイスがアクセスできない場合は、ルール処理とリンクの削除をトリガーする可能性があります。 - 処理の遅延: 特に多数のデバイスがある場合、イベントの生成と処理の間に遅延が発生する可能性があります。これにより、カーネルがデバイスを検出してからリンクが利用可能になるまでに遅れが生じます。
-
デバイスのアクセシビリティー:
udevルールによって呼び出される外部プログラム (blkidなど) がデバイスを一時的に開き、他のタスクからデバイスに一時的にアクセスできなくなる可能性があります。 -
リンクの更新:
/dev/disk/でudevによって管理されるデバイス名は、メジャーリリース間で変更される可能性があります。その場合、リンクの更新が必要になります。
次の表は、/dev/disk で使用可能なシンボリックリンクを示しています。
| デバイスの種別 | 非永続名 (カーネル名) | 永続的なシンボリックリンク名 |
|---|---|---|
| 実際のデバイス | ||
| nvme (Non-Volatile Memory Express) | /dev/nvme* |
/dev/disk/by-id/nvme-<wwid> |
| scsi (Small Computer System Interface) | /dev/sd*、/dev/sr* |
/dev/disk/by-id/scsi-<model>_<serial> |
| ata (Advanced Technology Attachment)/atapi (ATA Packet Interface) | /dev/sd*、/dev/sr* |
/dev/disk/by-id/ata-<model>_<serial> |
| cciss (Compaq Command Interface for SCSI-3 Support) | /dev/cciss* |
/dev/disk/by-id/cciss-<model>_<serial> |
| virtio (Virtual Input Output) | /dev/vd* | /dev/disk/by-id/virtio-<serial> |
| pmem (Persistent Memory) | /dev/pmem* | /dev/disk/by-id/pmem-<uuid> |
| mmc (MultiMedia Card) | /dev/mmcblk* | /dev/disk/by-id/mmc-<name>_<serial> |
| memstick (Memory Stick) | /dev/msblk* | /dev/disk/by-id/memstick-<name>_<serial> |
| 仮想デバイス | ||
| loop | /dev/loop* |
/dev/disk/by-loop-inode/<id_loop_backing_device>-<id_loop_backing_inode> |
| dm (device-mapper) | /dev/dm-* |
/dev/mapper/<name> |
| md (multiple device) | /dev/md* |
/dev/md/<devname> |
| パーティション (実デバイス上または仮想デバイス上) | ||
| (any) | (any) |
/dev/disk/by-partuuid/<uuid> |
| LVM PV (論理ボリュームマネージャー物理ボリューム。実デバイスまたは仮想デバイス上) | ||
| (any) | (any) | /dev/disk/by-id/lvm-pv-uuid-<pvuuid> |
2.2.1. 既存デバイスのデバイスリンク値を取得する
現在の udev データベースから、既存のデバイスのデバイスリンクの値を取得できます。
前提条件
- デバイスが存在し、システムに接続されています。
手順
既存のデバイスの
/dev配下のベースカーネルデバイスノード (DEVNAME) に割り当てられたすべてのデバイスシンボリックリンク (DEVLINKS) をリスト表示します。# udevadm info --name /dev/nvme0n1 --query property --property DEVLINKS --value /dev/disk/by-path/pci-0000:00:02.0-nvme-1 /dev/disk/by-diskseq/6 /dev/disk/by-id/nvme-QEMU_NVMe_Ctrl_nvme-1_1 /dev/disk/by-id/nvme-QEMU_NVMe_Ctrl_nvme-1 /dev/disk/by-id/nvme-QEMU_NVMe_Ctrl_nvme-1-ns-1 /dev/disk/by-id/nvme-nvme.8086-6e766d652d31-51454d55204e564d65204374726c-00000001nvme0n1 をデバイス名に置き換えます。
次のコマンドを使用して、すべての devlink が指すベースカーネル名を取得することもできます。
# udevadm info --name /dev/nvme0n1 --query property --property DEVNAME --value /dev/nvme0n1カーネル名とその devlink は互換的に使用できます。
次のコマンドを使用し、devlink の 1 つを使用して devlink の完全なリストを取得できます。
# udevadm info --name /dev/disk/by-id/nvme-nvme.8086-6e766d652d31-51454d55204e564d65204374726c-00000001 --query property --property DEVLINKS --value /dev/disk/by-id/nvme-QEMU_NVMe_Ctrl_nvme-1 /dev/disk/by-diskseq/6 /dev/disk/by-id/nvme-nvme.8086-6e766d652d31-51454d55204e564d65204374726c-00000001 /dev/disk/by-id/nvme-QEMU_NVMe_Ctrl_nvme-1-ns-1 /dev/disk/by-id/nvme-QEMU_NVMe_Ctrl_nvme-1_1 /dev/disk/by-path/pci-0000:00:02.0-nvme-1
第3章 ディスクパーティション
ディスクを 1 つ以上の論理領域に分割するには、ディスクのパーティション設定ユーティリティーを使用します。これにより、各パーティションを個別に管理できます。
3.1. パーティションの概要
ハードディスクは、パーティションテーブルの各ディスクパーティションの場所とサイズに関する情報を保存します。オペレーティングシステムは、パーティションテーブルの情報を使用して、各パーティションを論理ディスクとして扱います。ディスクパーティション設定には、次のような利点があります。
- 物理ボリュームの管理上の見落としの可能性を減らす。
- 十分なバックアップを確保する。
- 効率的なディスク管理を提供する。
3.2. パーティションテーブルの種類の比較
デバイスでパーティションを有効にするには、さまざまな種類のパーティションテーブルでブロックデバイスをフォーマットします。次の表では、ブロックデバイスで作成できるさまざまな種類のパーティションテーブルのプロパティーを比較しています。
このセクションでは、IBM Z アーキテクチャーに固有の DASD パーティションテーブルを説明しません。
| パーティションテーブル | パーティションの最大数 | パーティションの最大サイズ |
|---|---|---|
| マスターブートレコード (MBR) | 4 つのプライマリーパーティション、または 3 つのプライマリーパーティションと 12 の論理パーティションを持つ 1 つの拡張パーティション |
512 b セクターのドライブを使用する場合は 2 TiB |
| GUID パーティションテーブル (GPT) | 128 |
512 b セクターのドライブを使用する場合は 8 ZiB |
3.3. MBR ディスクパーティション
パーティションテーブルはそのディスクの先頭部分となる、他のファイルシステムまたはユーザーデータの前に格納されています。わかりやすくするために、次の図ではパーティションテーブルを区切って示しています。
図3.1 MBR パーティションテーブルがあるディスク

上記の図で示したとおり、パーティションテーブルは使用していない 4 つのプライマリーパーティションの 4 つのセクションに分けられます。プライマリーパーティションは、論理ディスクドライブ (またはセクション) を 1 つだけ含むハードドライブのパーティションです。各論理ドライブは、1 つのパーティションの定義に必要な情報を保持できます。つまり、パーティションテーブルで定義できるプライマリーパーティションは 4 つまでです。
各パーティションテーブルエントリーには、パーティションの重要な特徴が含まれています。
- ディスク上のパーティションの開始点と終了点
-
パーティションの状態 (
アクティブとしてフラグを立てることができるのは 1 つのパーティションのみ) - パーティションのタイプ
開始点と終了点は、ディスク上のパーティションのサイズと場所を定義します。一部のオペレーティングシステムブートローダーは、active フラグを使用します。つまり、"active" とマークされているパーティションのオペレーティングシステムが起動します。
タイプとは、パーティションの用途を識別する番号です。一部のオペレーティングシステムでは、パーティションの種類を使用して以下を行います。
- 特定のファイルシステムタイプを示します。
- 特定のオペレーティングシステムに関連付けられているパーティションにフラグを付けます。
- パーティションに起動可能なオペレーティングシステムが含まれていることを示します。
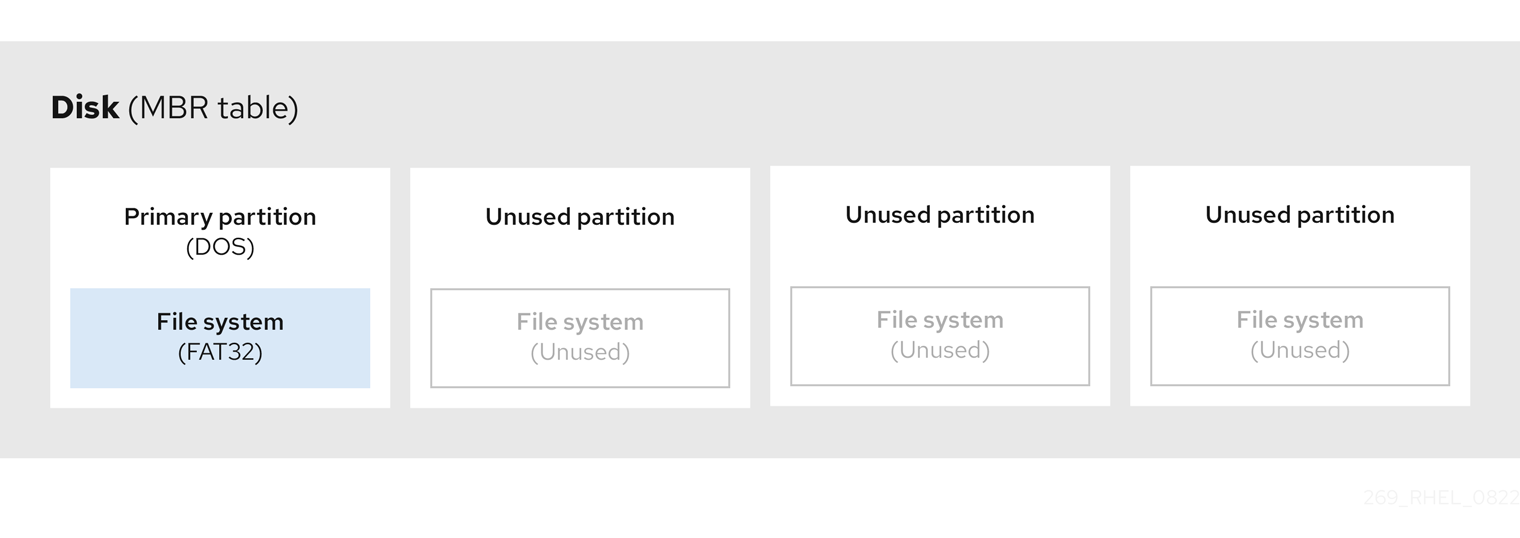
以下の図は、パーティションが 1 つあるドライブの例を示しています。この例では、最初のパーティションには DOS パーティションタイプのラベルが付けられています。
図3.2 1 つのパーティションを持つディスク
3.4. 拡張 MBR パーティション
必要があれば、タイプを extended に設定して追加のパーティションを作成します。
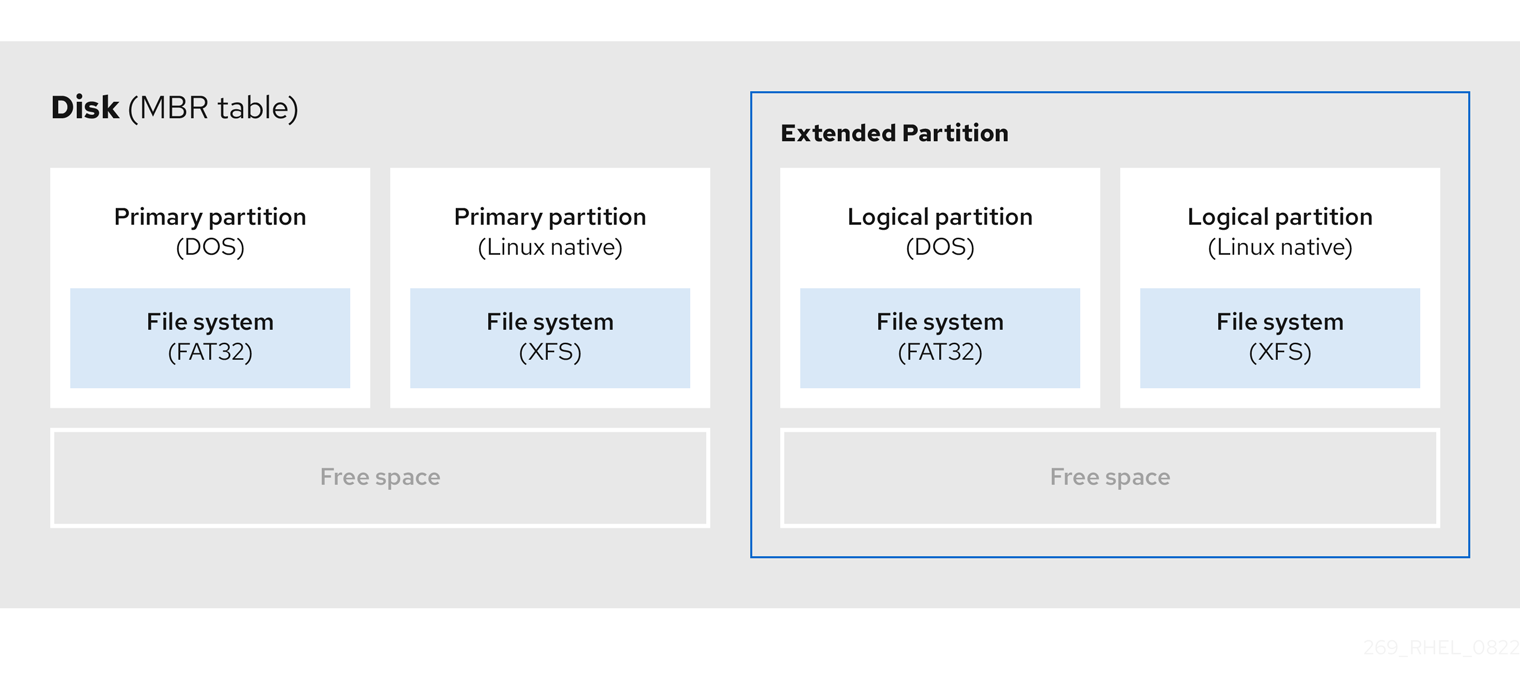
拡張パーティションは、ディスクドライブに似ています。拡張パーティション内に完全に含まれる 1 つ以上の論理パーティションを指す独自のパーティションテーブルがあります。次の図は、2 つのプライマリーパーティションと、2 つの論理パーティションを含む 1 つの拡張パーティションおよびいくつかの未パーティションの空き領域を備えたディスクドライブを示しています。
図3.3 2 つのプライマリーパーティションと拡張 MBR パーティションの両方を備えたディスク
最大 4 つのプライマリーパーティションと拡張パーティションのみを使用できますが、論理パーティションの数に制限はありません。Linux ではパーティションへのアクセスに制限があり、1 つのディスクドライブでは最大 15 個のパーティションが許可されます。
3.5. MBR パーティションタイプ
次の表は、最も一般的に使用される MBR パーティションタイプとそれらを表す 16 進数のリストです。
| MBR パーティションタイプ | 値 | MBR パーティションタイプ | 値 |
| Empty | 00 | Novell Netware 386 | 65 |
| DOS 12 ビット FAT | 01 | PIC/IX | 75 |
| XENIX root | O2 | 旧 MINIX | 80 |
| XENIX usr | O3 | Linux/MINUX | 81 |
| DOS 16 ビット (32M 以下) | 04 | Linux swap | 82 |
| Extended | 05 | Linux ネイティブ | 83 |
| DOS 16 ビット (32 以上) | 06 | Linux 拡張 | 85 |
| OS/2 HPFS | 07 | Amoeba | 93 |
| AIX | 08 | Amoeba BBT | 94 |
| AIX ブート可能 | 09 | BSD/386 | a5 |
| OS/2 Boot Manager | 0a | OpenBSD | a6 |
| Win95 FAT32 | 0b | NEXTSTEP | a7 |
| Win95 FAT32 (LBA) | 0c | BSDI fs | b7 |
| Win95 FAT16 (LBA) | 0e | BSDI swap | b8 |
| Win95 Extended (LBA) | 0f | Syrinx | c7 |
| Venix 80286 | 40 | CP/M | db |
| Novell | 51 | DOS アクセス | e1 |
| PRep Boot | 41 | DOS R/O | e3 |
| GNU HURD | 63 | DOS セカンダリー | f2 |
| Novell Netware 286 | 64 | BBT | ff |
3.6. GUID パーティションテーブル
GUID パーティションテーブル (GPT) は、Globally Unique Identifier (GUID) に基づくパーティション設定スキームです。
GPT は、Mater Boot Record (MBR) パーティションテーブルの制限に対処します。MBR パーティションテーブルは、約 2.2 TB に相当する 2 TiB を超えるストレージに対応できません。代わりに、GPT は大容量のハードディスクをサポートします。アドレス指定可能な最大ディスクサイズは、512b セクタードライブを使用する場合は 8 ZiB、4096b セクタードライブを使用する場合は 64 ZiB です。さらに、デフォルトで、GPT は最大 128 のプライマリーパーティションの作成をサポートします。パーティションテーブルにより多くの領域を割り当てて、プライマリーパーティションの最大量を拡張します。
GPT には GUID に基づくパーティションタイプがあります。特定のパーティションには特定の GUID が必要です。たとえば、Extensible Firmware Interface (EFI) ブートローダーのシステムパーティションには、GUID C12A7328-F81F-11D2-BA4B-00A0C93EC93B が必要です。
GPT ディスクは、論理ブロックアドレス指定 (LBA) とパーティションレイアウトを以下のように使用します。
- MBR ディスクとの下位互換性のために、システムは MBR データ用に GPT の最初のセクター (LBA 0) を予約し、"protective MBR" という名前を適用します。
プライマリー GPT
- ヘッダーは、デバイスの 2 番目の論理ブロック (LBA 1) から始まります。ヘッダーには、ディスク GUID、プライマリーパーティションテーブルの場所、セカンダリー GPT ヘッダーの場所、および CRC32 チェックサム、およびプライマリーパーティションテーブルが含まれます。また、テーブルにあるパーティションエントリーの数も指定します。
- デフォルトでは、プライマリー GPT には 128 のパーティションエントリーが含まれます。各パーティションには、128 バイトのエントリーサイズ、パーティションタイプ GUID、一意のパーティション GUID があります。
セカンダリー GPT
- リカバリーの場合は、プライマリーパーティションテーブルが破損した場合にバックアップテーブルとして役立ちます。
- ディスクの最後の論理セクターにはセカンダリー GPT ヘッダーが含まれており、プライマリーヘッダーが破損した場合に備えて GPT 情報を回復します。
以下が含まれます。
- ディスク GUID
- セカンダリーパーティションテーブルとプライマリー GPT ヘッダーの場所
- それ自体の CRC32 チェックサム
- セカンダリーパーティションテーブル
- 可能なパーティションエントリーの数
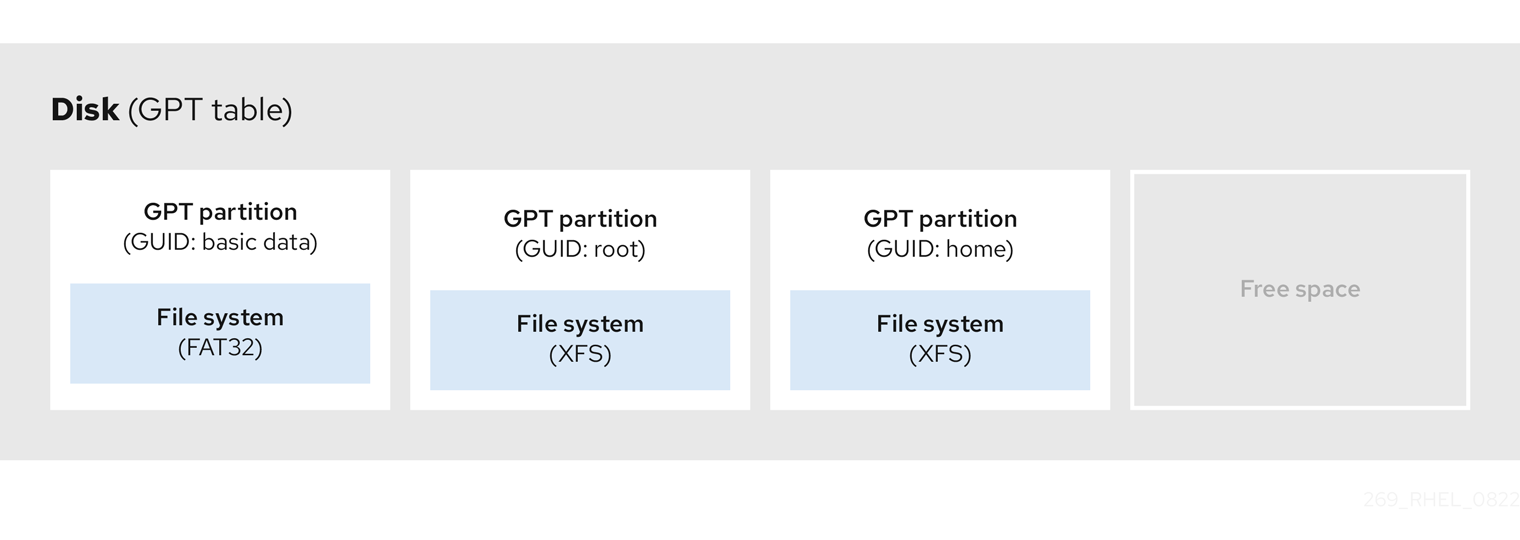
図3.4 GUID パーティションテーブルを含むディスク
GPT ディスクにブートローダーを正常にインストールするには、BIOS ブートパーティションが存在する必要があります。ディスクにすでに BIOS ブートパーティションが含まれている場合にのみ、再利用が可能です。これには、Anaconda インストールプログラムによって初期化されたディスクが含まれます。
3.7. パーティションタイプ
パーティションタイプを管理する方法は複数あります。
-
fdiskユーティリティーは、16 進数コードを指定することで、あらゆる種類のパーティションタイプに対応します。 -
systemd-gpt-auto-generatorはユニットジェネレーターユーティリティーで、パーティションタイプを使用してデバイスを自動的に識別し、マウントします。 partedユーティリティーは、フラグ を使用してパーティションタイプをマップします。partedユーティリティーは、LVM、swap、RAID など、特定のパーティションタイプのみを処理します。partedユーティリティーは、次のフラグの設定をサポートしています。-
boot -
root -
swap -
hidden -
raid -
lvm -
lba -
legacy_boot -
irst -
esp -
palo
-
parted 3.5 を使用する Red Hat Enterprise Linux 9 では、追加のフラグ chromeos_kernel および bls_boot を使用できます。
parted ユーティリティーは、パーティションを作成するときにオプションでファイルシステムタイプ引数を受け付けます。必要な条件のリストについては、parted を使用したパーティションの作成 を参照してください。値を使用して以下を行います。
- MBR にパーティションフラグを設定します。
-
GPT にパーティションの UUID タイプを設定します。たとえば、ファイルシステムタイプの
swap、fat、またはhfsには、異なる GUID が設定されます。デフォルト値は Linux Data GUID です。
この引数では、パーティションのファイルシステムは変更されません。サポート対象フラグと GUID のみ区別します。
次のファイルシステムのタイプがサポートされています。
-
xfs -
ext2 -
ext3 -
ext4 -
fat16 -
fat32 -
hfs -
hfs+ -
linux-swap -
ntfs -
reiserfs
3.8. パーティション命名スキーム
Red Hat Enterprise Linux は、/dev/xxyN 形式のファイル名を持つファイルベースの命名スキームを使用します。
デバイスおよびパーティション名は、以下の構造で構成されています。
/dev/-
すべてのデバイスファイルが含まれるディレクトリーの名前。ハードディスクにはパーティションが含まれるため、すべてのパーティションを表すファイルは
/devにあります。 xx- パーティション名の最初の 2 文字は、パーティションを含むデバイスのタイプを示します。
y-
この文字は、パーティションを含む特定のデバイスを示します。たとえば、
/dev/sdaは最初のハードディスク、/dev/sdbは 2 番目のハードディスクです。ドライブの数が 26 を超えるシステムでは、さらに多くの文字を使用できます (例:/dev/sdaa1)。 N-
最後の文字は、パーティションを表す数字を示します。最初の 4 つのパーティション (プライマリーまたは拡張) のパーティションには、
1から4までの番号が付けられます。論理パーティションは5から始まります。たとえば、/dev/sda3は 1 番目のハードディスクの 3 番目のプライマリーパーティションまたは拡張パーティションで、2 番目のハードディスク上の 2 番目の論理パーティション/dev/sdb6です。ドライブのパーティション番号は、MBR パーティションテーブルにのみ適用されます。N は常にパーティションを意味するものではないことに注意してください。
Red Hat Enterprise Linux が すべて のタイプのディスクパーティションを識別して参照できる場合でも、ファイルシステムを読み取れないため、すべてのパーティションタイプに保存されているデータにアクセスできます。ただし、多くの場合、別のオペレーティングシステム専用のパーティション上にあるデータには問題なくアクセスすることができます。
3.9. マウントポイントとディスクパーティション
Red Hat Enterprise Linux では、各パーティションは、ファイルおよびディレクトリーの単一セットをサポートするのに必要なストレージの一部を形成します。パーティションをマウントすると、指定されたディレクトリー (マウントポイント と呼ばれる) を開始点としてそのパーティションのストレージが利用可能になります。
たとえば、パーティション /dev/sda5 が /usr/ にマウントされている場合、/usr/ 下にあるすべてのファイルとディレクトリーは物理的に /dev/sda5 上に存在することになります。ファイル /usr/share/doc/FAQ/txt/Linux-FAQ は /dev/sda5 にありますが、ファイル /etc/gdm/custom.conf はありません。
また、この例では、/usr/ 以下の 1 つ以上のディレクトリーが他のパーティションのマウントポイントになる可能性もあります。たとえば、/usr/local にマウントされた /dev/sda7 パーティションが含まれる場合、/usr/local/man/whatis は /dev/sda5 ではなく /dev/sda7 にあります。
第4章 パーティションの使用
ディスクパーティション設定を使用して、ディスクを 1 つ以上の論理領域に分割し、各パーティションで個別に作業できるようにします。ハードディスクは、パーティションテーブルの各ディスクパーティションの場所とサイズに関する情報を保存します。このテーブルを使用すると、各パーティションはオペレーティングシステムへの論理ディスクとして表示されます。その後、それらの個々のディスクで読み取りと書き込みを行うことができます。
ブロックデバイスでパーティションを使用する利点と欠点の概要については、Red Hat ナレッジベースソリューション What are the advantages and disadvantages to using partitioning on LUNs, either directly or with LVM in between? を参照してください。
4.1. parted でディスクにパーティションテーブルを作成
parted ユーティリティーを使用して、より簡単にパーティションテーブルでブロックデバイスをフォーマットできます。
パーティションテーブルを使用してブロックデバイスをフォーマットすると、そのデバイスに保存されているすべてのデータが削除されます。
手順
インタラクティブな
partedシェルを起動します。# parted block-deviceデバイスにパーティションテーブルがあるかどうかを確認します。
(parted) printデバイスにパーティションが含まれている場合は、次の手順でパーティションを削除します。
新しいパーティションテーブルを作成します。
(parted) mklabel table-typetable-type を、使用するパーティションテーブルのタイプに置き換えます。
-
msdos(MBR の場合) -
gpt(GPT の場合)
-
例4.1 GUID パーティションテーブル (GPT) テーブルの作成
ディスクに GPT テーブルを作成するには、次のコマンドを使用します。
(parted) mklabel gptこのコマンドを入力すると、変更の適用が開始されます。
パーティションテーブルを表示して、作成されたことを確認します。
(parted) printpartedシェルを終了します。(parted) quit
4.2. parted でパーティションテーブルの表示
ブロックデバイスのパーティションテーブルを表示して、パーティションレイアウトと個々のパーティションの詳細を確認します。parted ユーティリティーを使用して、ブロックデバイスのパーティションテーブルを表示できます。
手順
partedユーティリティーを起動します。たとえば、次の出力は、デバイス/dev/sdaをリストします。# parted /dev/sdaパーティションテーブルを表示します。
(parted) print Model: ATA SAMSUNG MZNLN256 (scsi) Disk /dev/sda: 256GB Sector size (logical/physical): 512B/512B Partition Table: msdos Disk Flags: Number Start End Size Type File system Flags 1 1049kB 269MB 268MB primary xfs boot 2 269MB 34.6GB 34.4GB primary 3 34.6GB 45.4GB 10.7GB primary 4 45.4GB 256GB 211GB extended 5 45.4GB 256GB 211GB logicalオプション: 次に調べるデバイスに切り替えます。
(parted) select block-device
print コマンドの出力の詳細は、以下を参照してください。
Model: ATA SAMSUNG MZNLN256 (scsi)- ディスクタイプ、製造元、モデル番号、およびインターフェイス。
Disk /dev/sda: 256GB- ブロックデバイスへのファイルパスとストレージ容量。
Partition Table: msdos- ディスクラベルの種類。
Number-
パーティション番号。たとえば、マイナー番号 1 のパーティションは、
/dev/sda1に対応します。 StartおよびEnd- デバイスにおけるパーティションの開始場所と終了場所。
Type- 有効なタイプは、メタデータ、フリー、プライマリー、拡張、または論理です。
File system-
ファイルシステムの種類。ファイルシステムの種類が不明な場合は、デバイスの
File systemフィールドに値が表示されません。partedユーティリティーは、暗号化されたデバイスのファイルシステムを認識できません。 Flags-
パーティションのフラグ設定リスト。利用可能なフラグは、
boot、root、swap、hidden、raid、lvm、またはlbaです。
4.3. parted を使用したパーティションの作成
システム管理者は、parted ユーティリティーを使用してディスクに新しいパーティションを作成できます。
必要なパーティションは、swap、/boot/、および /(root) です。
前提条件
- ディスクのパーティションテーブル。
- 2TiB を超えるパーティションを作成する場合は、GUID Partition Table (GPT) でディスクをフォーマットしておく。
手順
partedユーティリティーを起動します。# parted block-device現在のパーティションテーブルを表示し、十分な空き領域があるかどうかを確認します。
(parted) print- 十分な空き容量がない場合は、パーティションのサイズを変更してください。
パーティションテーブルから、以下を確認します。
- 新しいパーティションの開始点と終了点
- MBR で、どのパーティションタイプにすべきか
新しいパーティションを作成します。
(parted) mkpart part-type name fs-type start end-
part-type を
primary、logical、またはextendedに置き換えます。これは MBR パーティションテーブルにのみ適用されます。 - name を任意のパーティション名に置き換えます。これは GPT パーティションテーブルに必要です。
-
fs-type を、
xfs、ext2、ext3、ext4、fat16、fat32、hfs、hfs+、linux-swap、ntfs、またはreiserfsに置き換えます。fs-type パラメーターは任意です。partedユーティリティーは、パーティションにファイルシステムを作成しないことに注意してください。 -
start と end を、パーティションの開始点と終了点を決定するサイズに置き換えます (ディスクの開始からカウントします)。
512MiB、20GiB、1.5TiBなどのサイズ接尾辞を使用できます。デフォルトサイズの単位はメガバイトです。
例4.2 小さなプライマリーパーティションの作成
MBR テーブルに 1024MiB から 2048MiB までのプライマリーパーティションを作成するには、次のコマンドを使用します。
(parted) mkpart primary 1024MiB 2048MiBコマンドを入力すると、変更の適用が開始されます。
-
part-type を
パーティションテーブルを表示して、作成されたパーティションのパーティションタイプ、ファイルシステムタイプ、サイズが、パーティションテーブルに正しく表示されていることを確認します。
(parted) printpartedシェルを終了します。(parted) quit新規デバイスノードを登録します。
# udevadm settleカーネルが新しいパーティションを認識していることを確認します。
# cat /proc/partitions
4.4. fdisk でパーティションタイプの設定
fdisk ユーティリティーを使用して、パーティションタイプまたはフラグを設定できます。
前提条件
- ディスク上のパーティション。
手順
インタラクティブな
fdiskシェルを起動します。# fdisk block-device現在のパーティションテーブルを表示して、パーティションのマイナー番号を確認します。
Command (m for help): print現在のパーティションタイプは
Type列で、それに対応するタイプ ID はId列で確認できます。パーティションタイプコマンドを入力し、マイナー番号を使用してパーティションを選択します。
Command (m for help): type Partition number (1,2,3 default 3): 2オプション: リストを 16 進数コードで表示します。
Hex code (type L to list all codes): Lパーティションタイプを設定します。
Hex code (type L to list all codes): 8e変更を書き込み、
fdiskシェルを終了します。Command (m for help): write The partition table has been altered. Syncing disks.変更を確認します。
# fdisk --list block-device
4.5. parted でパーティションのサイズ変更
parted ユーティリティーを使用して、パーティションを拡張して未使用のディスク領域を利用したり、パーティションを縮小してその容量をさまざまな目的に使用したりできます。
前提条件
- パーティションを縮小する前にデータをバックアップする。
- 2TiB を超えるパーティションを作成する場合は、GUID Partition Table (GPT) でディスクをフォーマットしておく。
- パーティションを縮小する場合は、サイズを変更したパーティションより大きくならないように、最初にファイルシステムを縮小しておく。
XFS は縮小に対応していません。
手順
partedユーティリティーを起動します。# parted block-device現在のパーティションテーブルを表示します。
(parted) printパーティションテーブルから、以下を確認します。
- パーティションのマイナー番号。
- 既存のパーティションの位置とサイズ変更後の新しい終了点。
パーティションのサイズを変更します。
(parted) resizepart 1 2GiB- 1 を、サイズを変更するパーティションのマイナー番号に置き換えます。
-
2 を、サイズを変更するパーティションの新しい終了点を決定するサイズに置き換えます (ディスクの開始からカウントします)。
512MiB、20GiB、1.5TiBなどのサイズ接尾辞を使用できます。デフォルトサイズの単位はメガバイトです。
パーティションテーブルを表示して、サイズ変更したパーティションのサイズが、パーティションテーブルで正しく表示されていることを確認します。
(parted) printpartedシェルを終了します。(parted) quitカーネルが新しいパーティションを登録していることを確認します。
# cat /proc/partitions- オプション: パーティションを拡張した場合は、そこにあるファイルシステムも拡張します。
4.6. parted でパーティションの削除
parted ユーティリティーを使用すると、ディスクパーティションを削除して、ディスク領域を解放できます。
手順
インタラクティブな
partedシェルを起動します。# parted block-device-
block-device を、パーティションを削除するデバイスへのパス (例:
/dev/sda) に置き換えます。
-
block-device を、パーティションを削除するデバイスへのパス (例:
現在のパーティションテーブルを表示して、削除するパーティションのマイナー番号を確認します。
(parted) printパーティションを削除します。
(parted) rm minor-number- minor-number を、削除するパーティションのマイナー番号に置き換えます。
このコマンドを実行すると、すぐに変更の適用が開始されます。
パーティションテーブルからパーティションが削除されたことを確認します。
(parted) printpartedシェルを終了します。(parted) quitパーティションが削除されたことをカーネルが登録していることを確認します。
# cat /proc/partitions-
パーティションが存在する場合は、
/etc/fstabファイルからパーティションを削除します。削除したパーティションを宣言している行を見つけ、ファイルから削除します。 システムが新しい
/etc/fstab設定を登録するように、マウントユニットを再生成します。# systemctl daemon-reloadスワップパーティション、または LVM の一部を削除した場合は、カーネルコマンドラインからパーティションへの参照をすべて削除します。
アクティブなカーネルオプションを一覧表示し、削除されたパーティションを参照するオプションがないか確認します。
# grubby --info=ALL削除されたパーティションを参照するカーネルオプションを削除します。
# grubby --update-kernel=ALL --remove-args="option"
アーリーブートシステムに変更を登録するには、
initramfsファイルシステムを再構築します。# dracut --force --verbose
第5章 ディスクを再設定するストラテジー
ディスクのパーティションを再設定する方法は複数あります。これには以下が含まれます。
- パーティションが分割されていない空き領域が利用できる。
- 未使用のパーティションが利用可能である。
- アクティブに使用されているパーティションの空き領域が利用可能である。
以下の例は、わかりやすくするために単純化されており、実際に Red Hat Enterprise Linux をインストールするときの正確なパーティションレイアウトは反映していません。
5.1. パーティションが分割されていない空き領域の使用
すでに定義されているパーティションはハードディスク全体にまたがらないため、定義されたパーティションには含まれない未割り当ての領域が残されます。次の図は、これがどのようになるかを示しています。
図5.1 パーティションが分割されていない空き領域があるディスク

最初の図は、1 つのプライマリーパーティションと未割り当て領域のある未定義のパーティションを持つディスクを表しています。2 番目の図は、スペースが割り当てられた 2 つの定義済みパーティションを持つディスクを表しています。
未使用のハードディスクもこのカテゴリーに分類されます。唯一の違いは、すべて の領域が定義されたパーティションの一部ではないことです。
新しいディスクでは、未使用の領域から必要なパーティションを作成できます。ほとんどのオペレーティングシステムは、ディスクドライブ上の利用可能な領域をすべて取得するように設定されています。
5.2. 未使用パーティションの領域の使用
次の例の最初の図は、未使用のパーティションを持つディスクを表しています。2 番目の図は、Linux の未使用パーティションの再割り当てを表しています。
図5.2 未使用のパーティションがあるディスク
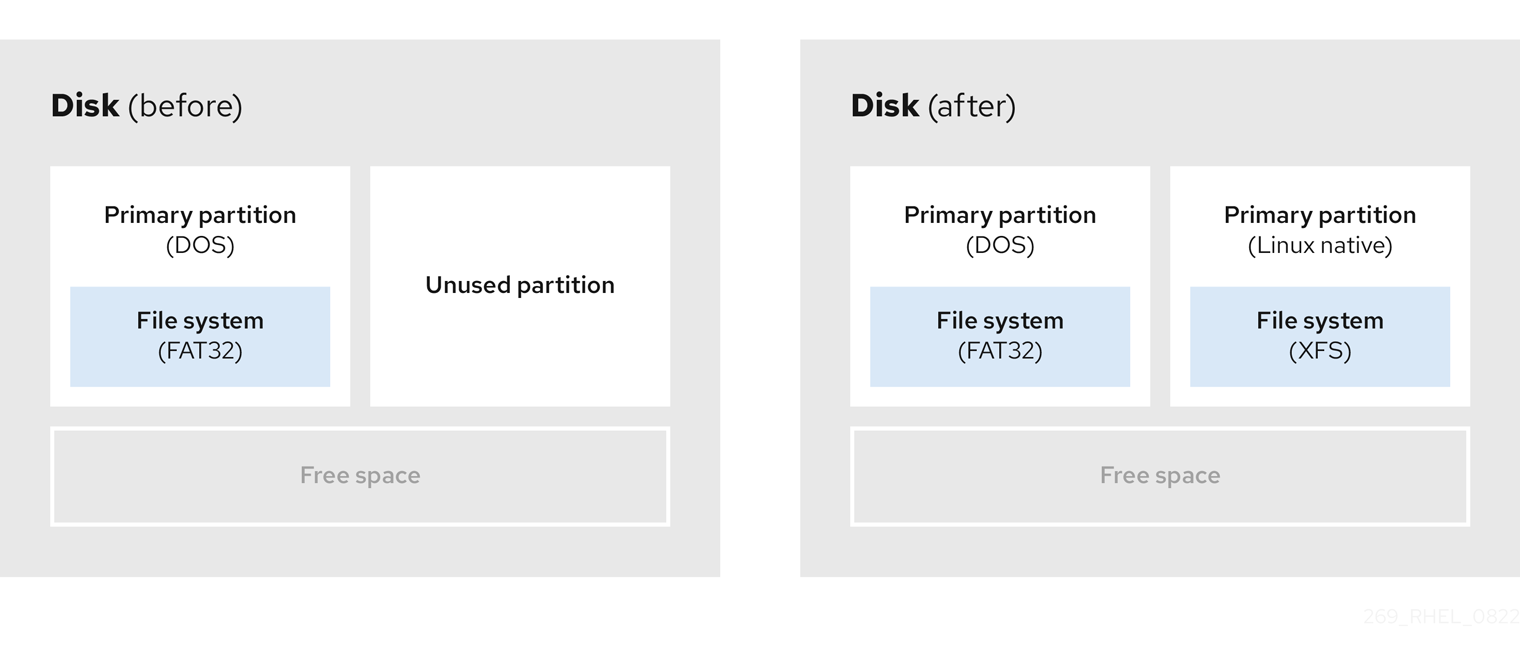
未使用のパーティションに割り当てられた領域を使用するには、パーティションを削除してから、代わりに適切な Linux パーティションを作成します。または、インストールプロセス時に未使用のパーティションを削除し、新しいパーティションを手動で作成します。
5.3. アクティブなパーティションの空き領域の使用
すでに使用されているアクティブなパーティションには、必要な空き領域が含まれているため、このプロセスの管理は困難な場合があります。ほとんどの場合、ソフトウェアが事前にインストールされているコンピューターのハードディスクには、オペレーティングシステムとデータを保持する大きなパーティションが 1 つ含まれます。
アクティブなパーティションでオペレーティングシステム (OS) を使用する場合は、OS を再インストールする必要があります。ソフトウェアが事前にインストールされている一部のコンピューターには、元の OS を再インストールするためのインストールメディアが含まれていないことに注意してください。元のパーティションと OS インストールを破棄する前に、これが OS に当てはまるか確認してください。
使用可能な空き領域の使用を最適化するには、破壊的または非破壊的なパーティション再設定の方法を使用できます。
5.3.1. 破壊的な再設定
破壊的なパーティション再設定は、ハードドライブのパーティションを破棄し、代わりにいくつかの小さなパーティションを作成します。この方法は完全にコンテンツを削除するため、元のパーティションから必要なデータをバックアップします。
既存のオペレーティングシステム用に小規模なパーティションを作成すると、以下が可能になります。
- ソフトウェアの再インストール。
- データの復元。
- Red Hat Enterprise Linux インストールの開始。
以下の図は、破壊的なパーティション再設定の方法を使用を簡潔に示しています。
図5.3 ディスク上での破壊的な再パーティション処理
このメソッドは、元のパーティションに保存されたデータをすべて削除します。
5.3.2. 非破壊的な再パーティション
非破壊的なパーティション再設定では、データの損失なしにパーティションのサイズを変更します。この方法は信頼性できますが、大きなドライブでは処理に時間がかかります。
以下は、破壊的なパーティション再設定の開始に役立つメソッドのリストです。
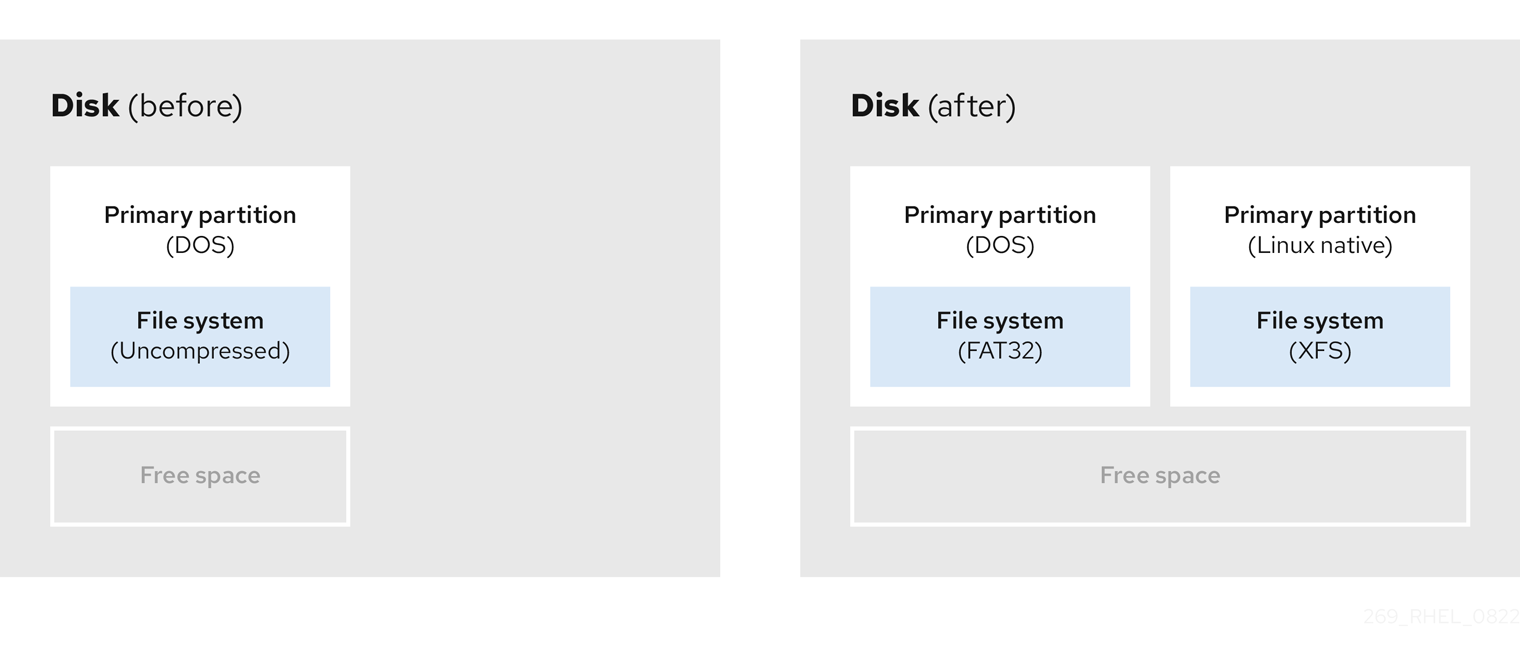
- 既存データの圧縮
一部のデータの保存場所は変更できません。これにより、必要なサイズへのパーティションのサイズ変更が妨げられ、最終的に破壊的なパーティション再設定プロセスが必要になる可能性があります。既存のパーティションでデータを圧縮すると、必要に応じてパーティションのサイズを変更できます。また、使用可能な空き容量を最大化することもできます。
以下の図は、このプロセスを簡略化したものです。
図5.4 ディスク上でのデータ圧縮
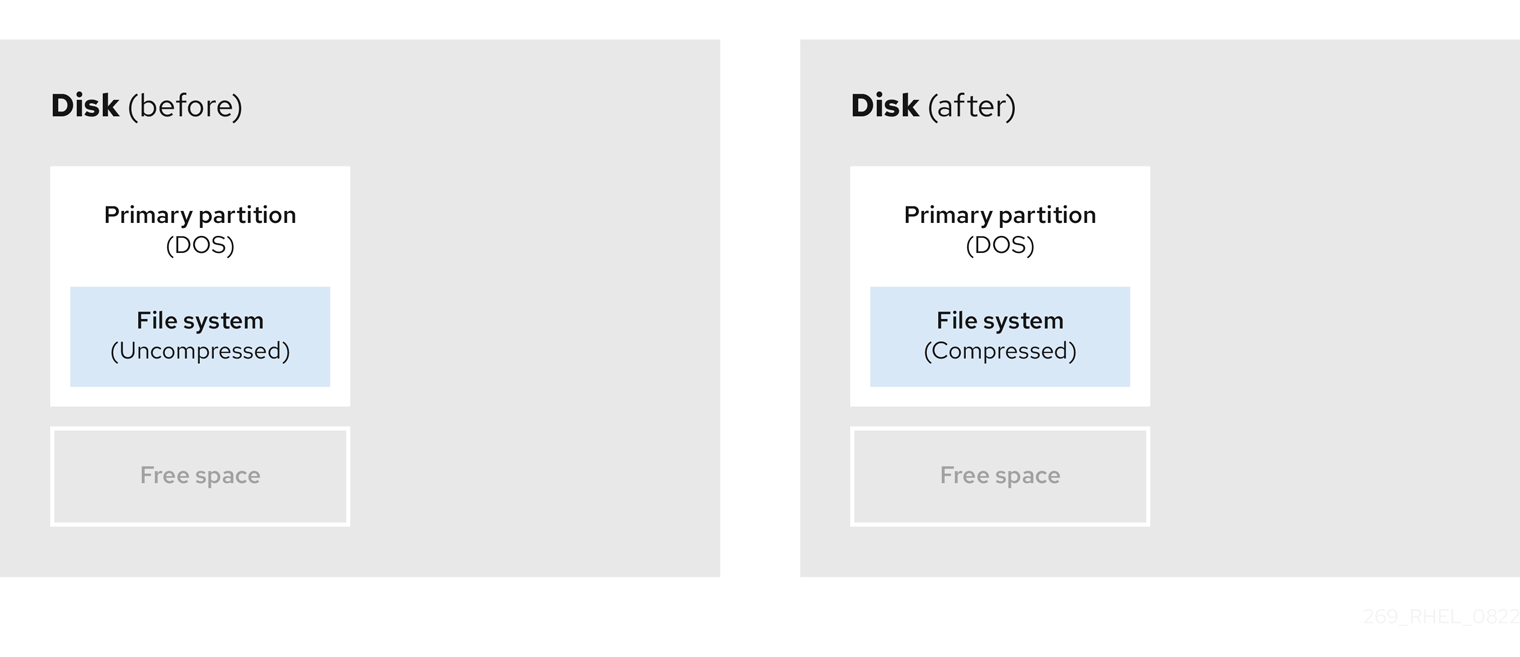
データ損失の可能性を回避するには、圧縮プロセスを続行する前にバックアップを作成します。
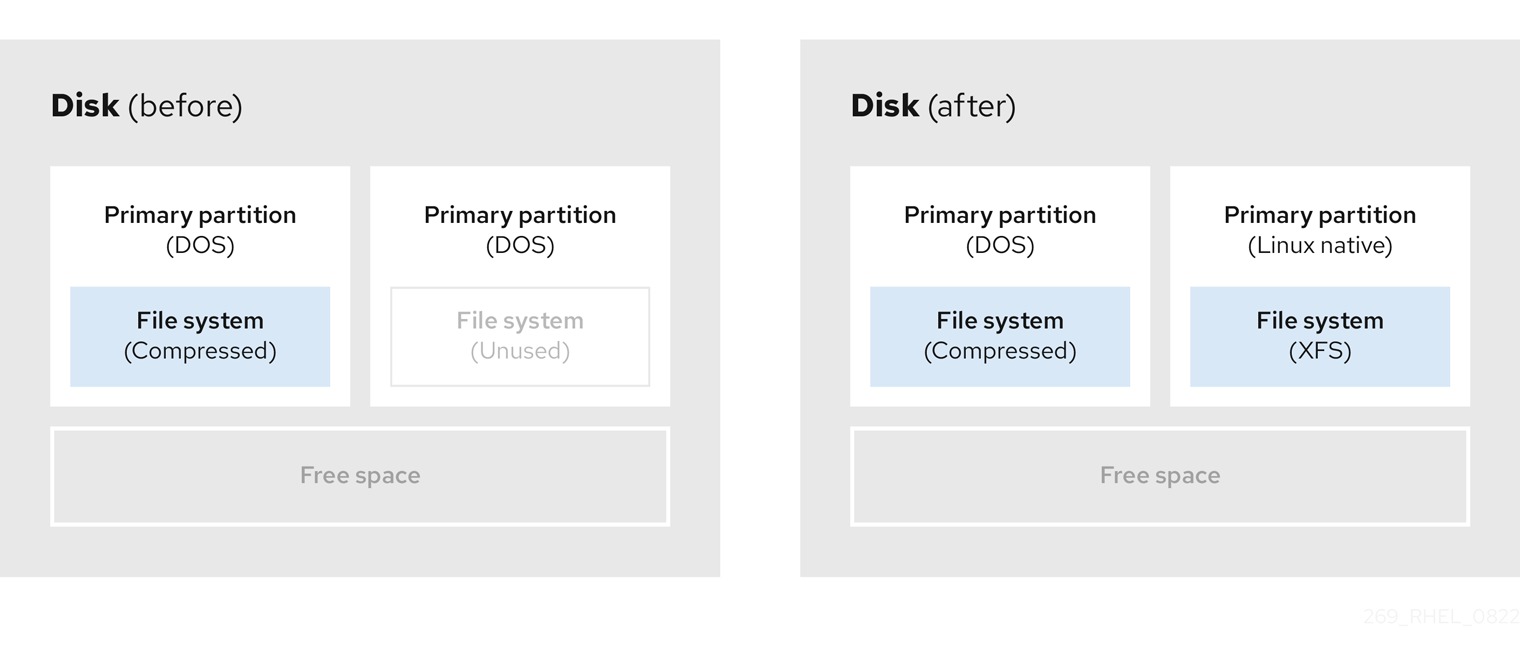
- 既存パーティションのサイズ変更
既存のパーティションのサイズを変更すると、より多くの領域を解放できます。結果は、サイズ変更ソフトウェアにより異なります。多くの場合、元のパーティションと同じタイプのフォーマットされていない新しいパーティションを作成できます。
サイズ変更後の手順は、使用するソフトウェアにより異なります。以下の例では、新しい DOS (Disk Operating System) パーティションを削除し、代わりに Linux パーティションを作成することを推奨します。サイズ変更プロセスを開始する前に、何がディスクに最適か確認してください。
図5.5 ディスク上でのパーティションのサイズ変更

- オプション: 新規パーティションの作成
一部のサイズ変更ソフトウェアは、Linux ベースのシステムをサポートしています。この場合、サイズ変更後に新たに作成されたパーティションを削除する必要はありません。新しいパーティションの作成方法は、使用するソフトウェアによって異なります。
以下の図は、新しいパーティションを作成する前後のディスクの状態を示しています。
図5.6 最終パーティション設定のディスク
第6章 iSCSI ターゲットの設定
Red Hat Enterprise Linux では、コマンドラインインターフェイスとして targetcli シェルを使用し、以下の操作を行います。
- iSCSI ハードウェアを使用できるように iSCSI ストレージ相互接続を追加、削除、表示、監視します。
- ファイル、ボリューム、ローカル SCSI デバイス、またはリモートシステムへの RAM ディスクで対応しているローカルストレージリソースをエクスポートします。
targetcli ツールには、組み込みタブ補完、自動補完サポート、インラインドキュメントなどのツリーベースのレイアウトがあります。
6.1. targetcli のインストール
targetcli ツールをインストールして、iSCSI ストレージの相互接続を追加、監視、削除します。
手順
targetcliツールをインストールします。# dnf install targetcliターゲットサービスを起動します。
# systemctl start targetシステムの起動時にターゲットサービスが起動するように設定するには、次のコマンドを実行します。
# systemctl enable targetファイアウォールの
3260ポートを開き、ファイアウォール設定を再読み込みします。# firewall-cmd --permanent --add-port=3260/tcp Success# firewall-cmd --reload Success
検証
targetcliレイアウトを表示します。# targetcli /> ls o- /........................................[...] o- backstores.............................[...] | o- block.................[Storage Objects: 0] | o- fileio................[Storage Objects: 0] | o- pscsi.................[Storage Objects: 0] | o- ramdisk...............[Storage Objects: 0] o- iscsi...........................[Targets: 0] o- loopback........................[Targets: 0]
6.2. iSCSI ターゲットの作成
iSCSI ターゲットを作成すると、クライアントの iSCSI イニシエーターがサーバー上のストレージデバイスにアクセスできるようになります。ターゲットとイニシエーターにはどちらも一意の識別名があります。
前提条件
-
targetcliをインストールして、実行している。詳細は、targetcli のインストール を参照してください。
手順
iSCSI ディレクトリーに移動します。
cdコマンドを使用して iSCSI ディレクトリーに移動することもできます。/> iscsi/iSCSI ターゲットを作成するには、以下のいずれかのオプションを使用します。
デフォルトのターゲット名を使用した iSCSI ターゲットの作成:
/iscsi> create Created target iqn.2003-01.org.linux-iscsi.hostname.x8664:sn.78b473f296ff Created TPG1特定の名前を使用した iSCSI ターゲットの作成:
/iscsi> create iqn.2006-04.com.example:444 Created target iqn.2006-04.com.example:444 Created TPG1 Here iqn.2006-04.com.example:444 is target_iqn_nameiqn.2006-04.com.example:444 を、特定のターゲット名に置き換えます。
新たに作成されたターゲットを確認します。
/iscsi> ls o- iscsi.......................................[1 Target] o- iqn.2006-04.com.example:444................[1 TPG] o- tpg1...........................[enabled, auth] o- acls...............................[0 ACL] o- luns...............................[0 LUN] o- portals.........................[0 Portal]
6.3. iSCSI バックストア
iSCSI バックストアは、エクスポートした LUN のデータをローカルマシンに保存するさまざまな方法に対応します。ストレージオブジェクトを作成して、バックストアが使用するリソースを定義します。
管理者は、LIO (Linux-IO) が対応する以下のバックストアデバイスのいずれかを選択できます。
fileioバックストア-
ローカルファイルシステム上の通常のファイルをディスクイメージとして使用する場合は、
fileioストレージオブジェクトを作成します。fileioバックストアの作成については、fileio ストレージオブジェクトの作成 を参照してください。 blockバックストア-
ローカルのブロックデバイスおよび論理デバイスを使用している場合には、
ブロックストレージオブジェクトを作成します。blockバックストアの作成については、ブロックストレージオブジェクトの作成 を参照してください。 pscsiバックストア-
ストレージオブジェクトが SCSI コマンドの直接パススルーに対応している場合は、
pscsiストレージオブジェクトを作成します。pscsiバックストアの作成については、pscsi ストレージオブジェクトの作成 を参照してください。 ramdiskバックストア-
一時的な RAM 対応デバイスを作成する場合は、
ramdiskストレージオブジェクトを作成します。ramdiskバックストアの作成については、メモリーコピーの RAM ディスクストレージオブジェクトの作成 を参照してください。
6.4. fileio ストレージオブジェクトの作成
fileio ストレージオブジェクトは、write_back または write_thru 操作のいずれかをサポートできます。write_back 操作では、ローカルファイルシステムキャッシュが有効になります。これにより、パフォーマンスが向上しますが、データの損失のリスクが高まります。
write_thru 操作を優先させるために、write_back=false を使用して write_back 操作を無効にすることが推奨されます。
前提条件
-
targetcliをインストールして、実行している。詳細は、targetcli のインストール を参照してください。
手順
backstores/ディレクトリーからfileio/に移動します。/> backstores/fileiofileioストレージオブジェクトを作成します。/backstores/fileio> create file1 /tmp/disk1.img 200M write_back=false Created fileio file1 with size 209715200
検証
作成された
fileioストレージオブジェクトを確認します。/backstores/fileio> ls
6.5. ブロックストレージオブジェクトの作成
ブロックドライバーを使用すると、/sys/block/ ディレクトリーにあるブロックデバイスを LIO (Linux-IO) で使用できます。これには、HDD、SSD、CD、DVD などの物理デバイス、およびソフトウェアやハードウェアの RAID ボリューム、LVM ボリュームなどの論理デバイスが含まれます。
前提条件
-
targetcliをインストールして、実行している。詳細は、targetcli のインストール を参照してください。
手順
backstores/ディレクトリーからblock/に移動します。/> backstores/block/blockバックストアを作成します。/backstores/block> create name=block_backend dev=/dev/sdb Generating a wwn serial. Created block storage object block_backend using /dev/sdb.
検証
作成された
blockストレージオブジェクトを確認します。/backstores/block> ls
6.6. pscsi ストレージオブジェクトの作成
SCSI エミュレーションがない場合、かつ /proc/scsi/scsi に lsscsi で表示される基盤の SCSI デバイスが存在する場合には、SCSI コマンドの直接パススルーをサポートするストレージオブジェクトであれば、どれでもバックストアとして設定できます。たとえば、SAS ハードドライブなどが該当します。このサブシステムでは、SCSI-3 以降に対応しています。
pscsi は、上級ユーザーのみが使用してください。非対称論理ユニット割り当て (ALUA) や永続予約 (VMware ESX や vSphere で使用される永続予約など) は、通常はデバイスのファームウェアに実装されず、誤作動やクラッシュが発生する原因となることがあります。確信が持てない場合は、実稼働の設定に block バックストアを使用してください。
前提条件
-
targetcliをインストールして、実行している。詳細は、targetcli のインストール を参照してください。
手順
backstores/ディレクトリーからpscsi/に移動します。/> backstores/pscsi/この例では、
/dev/sr0を使用して物理 SCSI デバイスである TYPE_ROM デバイスのpscsiバックストアを作成します。/backstores/pscsi> create name=pscsi_backend dev=/dev/sr0 Generating a wwn serial. Created pscsi storage object pscsi_backend using /dev/sr0
検証
作成した
pscsiストレージオブジェクトを確認します。/backstores/pscsi> ls
6.7. メモリーコピーの RAM ディスクストレージオブジェクトの作成
メモリーコピー RAM ディスク (ramdisk) は、完全な SCSI エミュレーションと、イニシエーターのメモリーコピーを使用した個別のメモリーマッピングが含まれる RAM ディスクを提供します。これにより、マルチセッションの機能を利用できます。これは、特に実稼働環境での高速で不揮発性の大容量ストレージで有用です。
前提条件
-
targetcliをインストールして、実行している。詳細は、targetcli のインストール を参照してください。
手順
backstores/ディレクトリーからramdisk/に移動します。/> backstores/ramdisk/1GB RAM ディスクバックストアを作成します。
/backstores/ramdisk> create name=rd_backend size=1GB Generating a wwn serial. Created rd_mcp ramdisk rd_backend with size 1GB.
検証
作成した
ramdiskストレージオブジェクトを確認します。/backstores/ramdisk> ls
6.8. iSCSI ポータルの作成
iSCSI ポータルを作成できます。これにより、IP アドレスとポートがターゲットに追加され、ターゲットが有効な状態に維持されます。
前提条件
-
targetcliをインストールして、実行している。詳細は、targetcli のインストール を参照してください。 - ターゲットポータルグループ (TPG) に関連付けられた iSCSI ターゲット。詳細は、iSCSI ターゲットの作成 を参照してください。
手順
TPG ディレクトリーに移動します。
/iscsi> iqn.2006-04.com.example:444/tpg1/iSCSI ポータルを作成するには、以下のいずれかのオプションを使用します。
デフォルトポータルを作成するには、デフォルトの iSCSI ポート
3260を使用し、ターゲットがそのポートのすべての IP アドレスをリッスンできるようにします。/iscsi/iqn.20...mple:444/tpg1> portals/ create Using default IP port 3260 Binding to INADDR_Any (0.0.0.0) Created network portal 0.0.0.0:3260特定の IP アドレスを使用したポータルの作成:
/iscsi/iqn.20...mple:444/tpg1> portals/ create 192.168.122.137 Using default IP port 3260 Created network portal 192.168.122.137:3260
検証
新たに作成されたポータルを確認します。
/iscsi/iqn.20...mple:444/tpg1> ls o- tpg.................................. [enabled, auth] o- acls ......................................[0 ACL] o- luns ......................................[0 LUN] o- portals ................................[1 Portal] o- 192.168.122.137:3260......................[OK]
6.9. iSCSI LUN の作成
論理ユニット番号 (LUN) は、iSCSI バックストアで対応している物理デバイスです。各 LUN には固有の番号があります。
前提条件
-
targetcliをインストールして、実行している。詳細は、targetcli のインストール を参照してください。 - ターゲットポータルグループ (TPG) に関連付けられた iSCSI ターゲット。詳細は、iSCSI ターゲットの作成 を参照してください。
- 作成したストレージオブジェクト。詳細は、iSCSI バックストア を参照してください。
手順
作成したストレージオブジェクトの LUN を作成します。
/iscsi/iqn.20...mple:444/tpg1> luns/ create /backstores/ramdisk/rd_backend Created LUN 0. /iscsi/iqn.20...mple:444/tpg1> luns/ create /backstores/block/block_backend Created LUN 1. /iscsi/iqn.20...mple:444/tpg1> luns/ create /backstores/fileio/file1 Created LUN 2.作成した LUN を確認します。
/iscsi/iqn.20...mple:444/tpg1> ls o- tpg.................................. [enabled, auth] o- acls ......................................[0 ACL] o- luns .....................................[3 LUNs] | o- lun0.........................[ramdisk/ramdisk1] | o- lun1.................[block/block1 (/dev/vdb1)] | o- lun2...................[fileio/file1 (/foo.img)] o- portals ................................[1 Portal] o- 192.168.122.137:3260......................[OK]デフォルトの LUN 名は
0から始まります。重要デフォルトでは、読み書きパーミッションを持つ LUN が作成されます。ACL の作成後に新しい LUN が追加されると、LUN は自動的に利用可能なすべての ACL にマッピングされ、セキュリティー上のリスクが発生します。読み取り専用権限を持つ LUN の作成については、Creating a read-only iSCSI LUN を参照してください。
- ACL を設定します。詳細は、iSCSI ACL の作成 を参照してください。
6.10. 読み取り専用の iSCSI LUN の作成
デフォルトでは、読み書きパーミッションを持つ LUN が作成されます。読み取り専用の LUN を作成できます。
前提条件
-
targetcliをインストールして、実行している。詳細は、targetcli のインストール を参照してください。 - ターゲットポータルグループ (TPG) に関連付けられた iSCSI ターゲット。詳細は、iSCSI ターゲットの作成 を参照してください。
- 作成したストレージオブジェクト。詳細は、iSCSI バックストア を参照してください。
手順
読み取り専用パーミッションを設定します。
/> set global auto_add_mapped_luns=false Parameter auto_add_mapped_luns is now 'false'.これにより、LUN が既存の ACL へ自動的にマッピングされないようになり、LUN を手動でマッピングできるようになります。
initiator_iqn_name ディレクトリーに移動します。
/> iscsi/target_iqn_name/tpg1/acls/initiator_iqn_name/LUN を作成します。
/iscsi/target_iqn_name/tpg1/acls/initiator_iqn_name> create mapped_lun=next_sequential_LUN_number tpg_lun_or_backstore=backstore write_protect=1たとえば、以下のようになります。
/iscsi/target_iqn_name/tpg1/acls/2006-04.com.example:888> create mapped_lun=1 tpg_lun_or_backstore=/backstores/block/block2 write_protect=1 Created LUN 1. Created Mapped LUN 1.作成した LUN を確認します。
/iscsi/target_iqn_name/tpg1/acls/2006-04.com.example:888> ls o- 2006-04.com.example:888 .. [Mapped LUNs: 2] | o- mapped_lun0 .............. [lun0 block/disk1 (rw)] | o- mapped_lun1 .............. [lun1 block/disk2 (ro)](mapped_lun0 の (
rw) とは異なり) mapped_lun1 行の最後に (ro) が表示されますが、これは、読み取り専用であることを表しています。- ACL を設定します。詳細は、iSCSI ACL の作成 を参照してください。
6.11. iSCSI ACL の作成
targetcli サービスは、アクセスコントロールリスト (ACL) を使用してアクセスルールを定義し、各イニシエーターに論理ユニット番号 (LUN) へのアクセスを許可します。
ターゲットとイニシエーターにはどちらも一意の識別名があります。ACL を設定するには、イニシエーターの一意の名前を知っている必要があります。iscsi-initiator-utils パッケージによって提供される /etc/iscsi/initiatorname.iscsi ファイルには、iSCSI イニシエーター名が含まれています。
前提条件
-
targetcliサービスが インストール され、実行されている。 - ターゲットポータルグループ (TPG) に関連付けられた iSCSI ターゲット。
手順
- オプション: ACL への LUN の自動マッピングを無効にするには、読み取り専用の iSCSI LUN の作成 を参照してください。
acls ディレクトリーへ移動します。
/> iscsi/target_iqn_name/tpg_name/acls/ACL を作成するには、以下のいずれかのオプションを使用します。
イニシエーターの
/etc/iscsi/initiatorname.iscsiファイルの initiator_iqn_name を使用します。iscsi/target_iqn_name/tpg_name/acls> create initiator_iqn_name Created Node ACL for initiator_iqn_name Created mapped LUN 2. Created mapped LUN 1. Created mapped LUN 0.Custom_name を使用し、それに一致するようにイニシエーターを更新します。
iscsi/target_iqn_name/tpg_name/acls> create custom_name Created Node ACL for custom_name Created mapped LUN 2. Created mapped LUN 1. Created mapped LUN 0.イニシエーター名の更新については、iSCSI イニシエーターの作成 を参照してください。
検証
作成した ACL を確認します。
iscsi/target_iqn_name/tpg_name/acls> ls o- acls .................................................[1 ACL] o- target_iqn_name ....[3 Mapped LUNs, auth] o- mapped_lun0 .............[lun0 ramdisk/ramdisk1 (rw)] o- mapped_lun1 .................[lun1 block/block1 (rw)] o- mapped_lun2 .................[lun2 fileio/file1 (rw)]
6.12. ターゲットのチャレンジハンドシェイク認証プロトコルの設定
Challenge-Handshake Authentication Protocol (CHAP) を使用すると、パスワードでターゲットを保護できます。イニシエーターは、このパスワードでターゲットに接続できることを認識している必要があります。
前提条件
- iSCSI ACL を作成している。詳細は、iSCSI ACL の作成 を参照してください。
手順
属性認証を設定します。
/iscsi/iqn.20...mple:444/tpg1> set attribute authentication=1 Parameter authentication is now '1'.useridとpasswordを設定します。/tpg1> set auth userid=redhat Parameter userid is now 'redhat'. /iscsi/iqn.20...689dcbb3/tpg1> set auth password=redhat_passwd Parameter password is now 'redhat_passwd'.aclsディレクトリーへ移動します。/> iscsi/target_iqn_name/tpg1/acls/initiator_iqn_name/属性認証を設定します。
/iscsi/iqn.20...:605fcc6a48be> set attribute authentication=1 Parameter authentication is now '1'.useridとpasswordを設定します。/iscsi/iqn.20...:605fcc6a48be> set auth userid=redhat Parameter userid is now 'redhat'. /iscsi/iqn.20...:605fcc6a48be> set auth password=redhat_passwd Parameter password is now 'redhat_passwd'.
6.13. targetcli ツールで iSCSI オブジェクトの削除
targetcli ツールを使用して iSCSI オブジェクトを削除できます。
手順
ターゲットからログオフします。
# iscsiadm -m node -T iqn.2006-04.com.example:444 -uターゲットへのログイン方法は、iSCSI イニシエーターの作成 を参照してください。
ACL、LUN、およびポータルのすべてを含め、ターゲット全体を削除します。
/> iscsi/ delete iqn.2006-04.com.example:444iqn.2006-04.com.example:444 を target_iqn_name に置き換えます。
iSCSI バックストアを削除するには、次のコマンドを実行します。
/> backstores/backstore-type/ delete block_backendbackstore-type を
fileio、block、pscsi、またはramdiskに置き換えます。block_backend を、削除する バックストア名 に置き換えます。
ACL などの iSCSI ターゲットの一部を削除するには、次のコマンドを実行します。
/> /iscsi/iqn-name/tpg/acls/ delete iqn.2006-04.com.example:444
検証
変更を表示します。
/> iscsi/ ls
第7章 iSCSI イニシエーターの設定
iSCSI イニシエーターは iSCSI ターゲットに接続するセッションを形成します。デフォルトでは、iSCSI サービスは起動に時間がかかり、iscsiadm コマンドの実行後にサービスが起動します。root が iSCSI デバイスにない場合や、node.startup = automatic でマークされたノードがない場合は、iscsiadm コマンドが実行するまで iSCSI サービスが起動しなくなります。これには、カーネルモジュール iscsid または iscsi の起動が必要になります。
iscsid サービスを強制的に実行し、iSCSI カーネルモジュールをロードするには、root として systemctl start iscsid コマンドを実行します。
7.1. iSCSI イニシエーターの作成
サーバー上のストレージデバイスにアクセスするために、iSCSI ターゲットに接続するための iSCSI イニシエーターを作成します。
前提条件
iSCSI ターゲットのホスト名と IP アドレスがあります。
- 外部ソフトウェアが作成したストレージターゲットに接続している場合は、ストレージ管理者からターゲットのホスト名と IP アドレスを取得します。
- iSCSI ターゲットを作成する場合は、iSCSI ターゲットの作成 を参照してください。
手順
クライアントマシンに
iscsi-initiator-utilsをインストールします。# dnf install iscsi-initiator-utilsiscsidサービスを再起動します。# systemctl start iscsidイニシエーター名を確認します。
# cat /etc/iscsi/initiatorname.iscsi InitiatorName=iqn.2006-04.com.example:888iSCSI ACL の作成 で ACL にカスタム名を指定した場合は、ACL と一致するようにイニシエーター名を更新します。
/etc/iscsi/initiatorname.iscsiファイルを開き、イニシエーター名を変更します。# vi /etc/iscsi/initiatorname.iscsi InitiatorName=custom-nameiscsidサービスを再起動します。# systemctl restart iscsid
ターゲットを検出し、表示されたターゲット IQN でターゲットにログインします。
# iscsiadm -m discovery -t st -p 10.64.24.179 10.64.24.179:3260,1 iqn.2006-04.com.example:444 # iscsiadm -m node -T iqn.2006-04.com.example:444 -l Logging in to [iface: default, target: iqn.2006-04.com.example:444, portal: 10.64.24.179,3260] (multiple) Login to [iface: default, target: iqn.2006-04.com.example:444, portal: 10.64.24.179,3260] successful.10.64.24.179 を、target-ip-address に置き換えます。
この手順では、iSCSI ACL の作成 で説明されているように、それぞれのイニシエーター名が ACL に追加されている場合は、同じターゲットに接続されている任意の数のイニシエーターに対してこの手順を使用できます。
iSCSI ディスク名を確認して、この iSCSI ディスクにファイルシステムを作成します。
# grep "Attached SCSI" /var/log/messages # mkfs.ext4 /dev/disk_namedisk_name を、
/var/log/messagesファイルに記載されている iSCSI ディスク名に置き換えます。ファイルシステムをマウントします。
# mkdir /mount/point # mount /dev/disk_name /mount/point/mount/point を、パーティションのマウントポイントに置き換えます。
システムの起動時にファイルシステムを自動的にマウントするように
/etc/fstabを編集します。# vi /etc/fstab /dev/disk_name /mount/point ext4 _netdev 0 0disk_name を iSCSI ディスク名に置き換え、/mount/point を、パーティションのマウントポイントに置き換えます。
7.2. イニシエーター用のチャレンジハンドシェイク認証プロトコルの設定
Challenge-Handshake Authentication Protocol (CHAP) を使用すると、パスワードでターゲットを保護できます。イニシエーターは、このパスワードでターゲットに接続できることを認識している必要があります。
前提条件
- iSCSI イニシエーターを作成しました。詳細は、iSCSI イニシエーターの作成 を参照してください。
-
ターゲットの
CHAPを設定します。詳細は、ターゲットのチャレンジハンドシェイク認証プロトコルの設定 を参照してください。
手順
iscsid.confファイルで CHAP 認証を有効にします。# vi /etc/iscsi/iscsid.conf node.session.auth.authmethod = CHAPデフォルトでは、
node.session.auth.authmethodはNoneに設定されています。ターゲットの
usernameとpasswordをiscsid.confファイルに追加します。node.session.auth.username = redhat node.session.auth.password = redhat_passwdiscsidサービスを再起動します。# systemctl restart iscsid
7.3. iscsiadm ユーティリティーを使用して iSCSI セッションを監視する
iscsiadm ユーティリティーを使用して iscsi セッションを監視できます。
デフォルトでは、iSCSI サービスは起動に時間がかかり、iscsiadm コマンドの実行後にサービスが起動します。root が iSCSI デバイスにない場合や、node.startup = automatic でマークされたノードがない場合は、iscsiadm コマンドが実行するまで iSCSI サービスが起動しなくなります。これには、カーネルモジュール iscsid または iscsi の起動が必要になります。
iscsid サービスを強制的に実行し、iSCSI カーネルモジュールをロードするには、root として systemctl start iscsid コマンドを使用します。
手順
クライアントマシンに
iscsi-initiator-utilsをインストールします。# dnf install iscsi-initiator-utils実行中のセッションに関する情報を検索します。
# iscsiadm -m session -P 3このコマンドは、セッションまたはデバイスの状態、セッション ID (sid)、いくつかのネゴシエートしたパラメーター、およびセッション経由でアクセス可能な SCSI デバイスを表示します。
より短い出力 (たとえば
sid-to-node間のマッピングのみの表示) には、次のコマンドを実行します。# iscsiadm -m session -P 0 or # iscsiadm -m session tcp [2] 10.15.84.19:3260,2 iqn.1992-08.com.netapp:sn.33615311 tcp [3] 10.15.85.19:3260,3 iqn.1992-08.com.netapp:sn.33615311このコマンドは、
driver [sid] target_ip:port,target_portal_group_tag proper_target_nameの形式で実行中のセッションのリストを表示します。
7.4. DM Multipath によるデバイスのタイムアウトのオーバーライド
sysfs オプションの recovery_tmo は、特定の iSCSI デバイスのタイムアウトを制御します。次のオプションは、recovery_tmo 値をグローバルにオーバーライドします。
-
replacement_timeout設定オプションは、すべての iSCSI デバイスのrecovery_tmo値をグローバルにオーバーライドします。 DM Multipath の
fast_io_fail_tmoオプションは、DM Multipath によって管理されるすべての iSCSI デバイスのrecovery_tmo値をグローバルにオーバーライドします。DM Multipath の
fast_io_fail_tmoオプションは、ファイバーチャネルデバイスのfast_io_fail_tmoオプションもオーバーライドします。
DM Multipath の fast_io_fail_tmo オプションは、replacement_timeout よりも優先されます。multipathd サービスがリロードされるたびに、recovery_tmo が fast_io_fail_tmo 設定オプションの値にリセットされます。DM Multipath によって管理されるデバイスの recovery_tmo をオーバーライドするには、DM Multipath の fast_io_fail_tmo 設定オプションを使用してください。
第8章 ファイバーチャネルデバイスの使用
Red Hat Enterprise Linux 9 は、以下のネイティブファイバーチャネルドライバーを提供します。
-
lpfc -
qla2xxx -
zfcp
8.1. LUN のサイズ変更後にファイバーチャネル論理ユニットを再スキャンする
外部ストレージの論理ユニット番号 (LUN) のサイズを変更した場合は、echo コマンドを使用してカーネルのサイズのビューを更新します。
手順
multipath論理ユニットのパスとなるデバイスを特定します。# multipath -llマルチパスを使用するシステムで、ファイバーチャネル論理ユニットを再スキャンします。
$ echo 1 > /sys/block/<device_ID>/device/rescan<device_ID>は、デバイスの ID (例:sda) に置き換えます。
8.2. ファイバーチャネルを使用したデバイスのリンク切れ動作の特定
ドライバーがトランスポートの dev_loss_tmo コールバックを実装している場合、トランスポートの問題が検出されるとリンクを経由したデバイスへのアクセス試行がブロックされます。
手順
リモートポートの状態を判断します。
$ cat /sys/class/fc_remote_ports/rport-host:bus:remote-port/port_stateこのコマンドは、次のいずれかの出力を返します。
-
リモートポートからアクセスしたデバイスとともにリモートポートがブロックされると
Blockedとなります。 リモートポートが正常に動作しているときには
Onlineとなりますdev_loss_tmo秒以内に問題が解決されない場合は、rportおよびデバイスのブロックが解除されます。そのデバイスで実行しているすべての I/O は、そのデバイスに送信された新しい I/O とともにすべて失敗します。
-
リモートポートからアクセスしたデバイスとともにリモートポートがブロックされると
リンクロスが dev_loss_tmo を超えると、scsi_device デバイスおよび sd_N_ デバイスが削除されます。通常、ファイバーチャネルクラスがデバイスを変更することはありません。たとえば、/dev/sda は /dev/sda のままです。これは、ターゲットバインディングがファイバーチャネルドライバーによって保存されており、ターゲットポートが復帰した際に SCSI アドレスが忠実に再作成されるためです。ただし、これは保証されません。ストレージボックス内の LUN 設定に追加の変更が加えられていない場合にのみ、デバイスが復元されます。
8.3. ファイバーチャネル設定ファイル
以下は、ユーザー空間の API をファイバーチャネルに提供する /sys/class/ ディレクトリーの設定ファイルのリストです。
項目は以下の変数を使用します。
H- ホスト番号
B- バス番号
T- ターゲット
L- 論理ユニット (LUN)
-R- リモートポート番号
システムでマルチパスソフトウェアを使用している場合は、本セクションで説明されている値を変更する前にハードウェアベンダーにお問い合わせください。
/sys/class/fc_transport/targetH:B:T/ のトランスポート設定
port_id- 24 ビットのポート ID/アドレス
node_name- 64 ビットのノード名
port_name- 64 ビットのポート名
/sys/class/fc_remote_ports/rport-H:B-R/ のリモートポート設定
-
port_id -
node_name -
port_name dev_loss_tmoscsi デバイスがシステムから削除されるタイミングを制御します。
dev_loss_tmoがトリガーされると、scsi デバイスが削除されます。multipath.confファイルでは、dev_loss_tmoをinfinityに設定できます。Red Hat Enterprise Linux 9 では、
fast_io_fail_tmoオプションを設定しないと、dev_loss_tmoは600秒に制限されます。デフォルトでは、multipathdサービスが実行している場合は、Red Hat Enterprise Linux 9 でfast_io_fail_tmoが5秒に設定されています。それ以外の場合はoffに設定されます。fast_io_fail_tmoリンクに "bad" のマークが付くまでの待機秒数を指定します。リンクに bad のマークが付けられると、対応するパス上の既存の実行中の I/O または新しい I/O が失敗します。
I/O がブロックされたキューに存在する場合は、
dev_loss_tmoの期限が切れ、キューのブロックが解除されるまでエラーを起こしません。fast_io_fail_tmoを off 以外の値に設定すると、dev_loss_tmoは取得されません。fast_io_fail_tmoを off に設定すると、システムからデバイスが削除されるまで I/O は失敗します。fast_io_fail_tmoに数値を設定すると、fast_io_fail_tmoタイムアウトが発生するとすぐに I/O が失敗します。
/sys/class/fc_host/hostH/ のホスト設定
-
port_id -
node_name -
port_name issue_lipリモートポートを再検出するようにドライバーに指示します。
第9章 NVMe over fabric デバイスの概要
Non-volatile Memory Express™ (NVMe™) は、ホストソフトウェアユーティリティーがソリッドステートドライブと通信できるようにするインターフェイスです。
次の種類のファブリックトランスポートを使用して、NVMe over fabric デバイスを設定します。
- NVMe over Remote Direct Memory Access (NVMe/RDMA)
- NVMe™/RDMA の設定方法については、NVMe/RDMA を使用した NVMe over Fabric の設定 を参照してください。
- NVMe over Fibre Channel (NVMe/FC)
- NVMe™/FC の設定方法については、NVMe/FC を使用した NVMe over Fabric の設定 を参照してください。
- NVMe over TCP (NVMe/TCP)
- NVMe™/TCP の設定方法については、NVMe/TCP を使用した NVMe over Fabrics の設定 を参照してください。
ファブリック上で NVMe を使用する場合、ソリッドステートドライブはシステムに対してローカルである必要はありません。NVMe over Fabrics デバイスを介してリモートで設定できます。
第10章 NVMe/RDMA を使用した NVMe over Fabrics の設定
Non-volatile Memory Express™ (NVMe™) over RDMA (NVMe™/RDMA) セットアップでは、NVMe コントローラーと NVMe イニシエーターを設定します。
10.1. configfs を使用した NVMe/RDMA コントローラーのセットアップ
configfs を使用して、Non-volatile Memory Express™ (NVMe™) over RDMA (NVMe™/RDMA) コントローラーを設定できます。
前提条件
-
nvmetサブシステムに割り当てるブロックデバイスがあることを確認する。
手順
nvmet-rdmaサブシステムを作成します。# modprobe nvmet-rdma # mkdir /sys/kernel/config/nvmet/subsystems/testnqn # cd /sys/kernel/config/nvmet/subsystems/testnqntestnqn を、サブシステム名に置き換えます。
すべてのホストがこのコントローラーに接続できるようにします。
# echo 1 > attr_allow_any_hostnamespace を設定します。
# mkdir namespaces/10 # cd namespaces/1010 を、namespace の数値に置き換えます。
NVMe デバイスへのパスを設定します。
# echo -n /dev/nvme0n1 > device_pathnamespace を有効にします。
# echo 1 > enableNVMe ポートでディレクトリーを作成します。
# mkdir /sys/kernel/config/nvmet/ports/1 # cd /sys/kernel/config/nvmet/ports/1mlx5_ib0 の IP アドレスを表示します。
# ip addr show mlx5_ib0 8: mlx5_ib0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 4092 qdisc mq state UP group default qlen 256 link/infiniband 00:00:06:2f:fe:80:00:00:00:00:00:00:e4:1d:2d:03:00:e7:0f:f6 brd 00:ff:ff:ff:ff:12:40:1b:ff:ff:00:00:00:00:00:00:ff:ff:ff:ff inet 172.31.0.202/24 brd 172.31.0.255 scope global noprefixroute mlx5_ib0 valid_lft forever preferred_lft forever inet6 fe80::e61d:2d03:e7:ff6/64 scope link noprefixroute valid_lft forever preferred_lft foreverコントローラーのトランスポートアドレスを設定します。
# echo -n 172.31.0.202 > addr_traddrRDMA をトランスポートタイプとして設定します。
# echo rdma > addr_trtype # echo 4420 > addr_trsvcidポートのアドレスファミリーを設定します。
# echo ipv4 > addr_adrfamソフトリンクを作成します。
# ln -s /sys/kernel/config/nvmet/subsystems/testnqn /sys/kernel/config/nvmet/ports/1/subsystems/testnqn
検証
NVMe コントローラーが指定されたポートでリッスンしていて、接続要求の準備ができていることを確認します。
# dmesg | grep "enabling port" [ 1091.413648] nvmet_rdma: enabling port 1 (172.31.0.202:4420)
10.2. nvmetcli を使用した NVMe/RDMA コントローラーのセットアップ
nvmetcli ユーティリティーを使用して、Non-volatile Memory Express™ (NVMe™) over RDMA (NVMe™/RDMA) コントローラーを設定できます。nvmetcli ユーティリティーには、コマンドラインと対話式のシェルオプションが用意されています。
前提条件
-
nvmetサブシステムに割り当てるブロックデバイスがあることを確認する。 -
root で、以下の
nvmetcli操作を実行する。
手順
nvmetcliパッケージをインストールします。# dnf install nvmetclirdma.jsonファイルをダウンロードします。# wget http://git.infradead.org/users/hch/nvmetcli.git/blob_plain/0a6b088db2dc2e5de11e6f23f1e890e4b54fee64:/rdma.json-
rdma.jsonファイルを編集して、traddrの値を172.31.0.202に変更します。 NVMe コントローラー設定ファイルをロードして、コントローラーをセットアップします。
# nvmetcli restore rdma.json
NVMe コントローラー設定ファイル名を指定しない場合は、nvmetcli が /etc/nvmet/config.json ファイルを使用します。
検証
NVMe コントローラーが指定されたポートでリッスンしていて、接続要求の準備ができていることを確認します。
# dmesg | tail -1 [ 4797.132647] nvmet_rdma: enabling port 2 (172.31.0.202:4420)オプション: 現在の NVMe コントローラーをクリアします。
# nvmetcli clear
10.3. NVMe/RDMA ホストの設定
NVMe 管理コマンドラインインターフェイス (nvme-cli) ツールを使用して、Non-volatile Memory Express™ (NVMe™) over RDMA (NVMe™/RDMA) ホストを設定できます。
手順
nvme-cliツールをインストールします。# dnf install nvme-clinvme-rdmaモジュールが読み込まれていない場合は、読み込みます。# modprobe nvme-rdmaNVMe コントローラーで使用可能なサブシステムを検出します。
# nvme discover -t rdma -a 172.31.0.202 -s 4420 Discovery Log Number of Records 1, Generation counter 2 =====Discovery Log Entry 0====== trtype: rdma adrfam: ipv4 subtype: nvme subsystem treq: not specified, sq flow control disable supported portid: 1 trsvcid: 4420 subnqn: testnqn traddr: 172.31.0.202 rdma_prtype: not specified rdma_qptype: connected rdma_cms: rdma-cm rdma_pkey: 0x0000検出されたサブシステムに接続します。
# nvme connect -t rdma -n testnqn -a 172.31.0.202 -s 4420 # lsblk NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT sda 8:0 0 465.8G 0 disk ├─sda1 8:1 0 1G 0 part /boot └─sda2 8:2 0 464.8G 0 part ├─rhel_rdma--virt--03-root 253:0 0 50G 0 lvm / ├─rhel_rdma--virt--03-swap 253:1 0 4G 0 lvm [SWAP] └─rhel_rdma--virt--03-home 253:2 0 410.8G 0 lvm /home nvme0n1 # cat /sys/class/nvme/nvme0/transport rdmatestnqn を NVMe サブシステム名に置き換えます。
172.31.0.202 をコントローラーの IP アドレスに置き換えます。
4420 を、ポート番号に置き換えます。
検証
現在接続されている NVMe デバイスのリストを表示します。
# nvme listオプション: コントローラーから切断します。
# nvme disconnect -n testnqn NQN:testnqn disconnected 1 controller(s) # lsblk NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT sda 8:0 0 465.8G 0 disk ├─sda1 8:1 0 1G 0 part /boot └─sda2 8:2 0 464.8G 0 part ├─rhel_rdma--virt--03-root 253:0 0 50G 0 lvm / ├─rhel_rdma--virt--03-swap 253:1 0 4G 0 lvm [SWAP] └─rhel_rdma--virt--03-home 253:2 0 410.8G 0 lvm /home
第11章 NVMe/FC を使用した NVMe over Fabrics の設定
Non-volatile Memory Express™ (NVMe™) over Fibre Channel (NVMe™/FC) トランスポートは、特定の Broadcom Emulex および Marvell Qlogic ファイバーチャネルアダプターと共に使用する場合、ホストモードで完全にサポートされます。
11.1. Broadcom アダプターの NVMe ホストの設定
NVMe 管理コマンドラインインターフェイス (nvme-cli) ユーティリティーを使用して、Broadcom アダプターで Non-volatile Memory Express™ (NVMe™) ホストを設定できます。
手順
nvme-cliユーティリティーをインストールします。# dnf install nvme-cliこれにより、
/etc/nvme/ディレクトリーにhostnqnファイルが作成されます。hostnqnファイルは、NVMe ホストを識別します。ローカルポートとリモートポートのワールドワイドノード名 (WWNN) とワールドワイドポート名 (WWPN) 識別子を見つけます。
# cat /sys/class/scsi_host/host*/nvme_info NVME Host Enabled XRI Dist lpfc0 Total 6144 IO 5894 ELS 250 NVME LPORT lpfc0 WWPN x10000090fae0b5f5 WWNN x20000090fae0b5f5 DID x010f00 ONLINE NVME RPORT WWPN x204700a098cbcac6 WWNN x204600a098cbcac6 DID x01050e TARGET DISCSRVC ONLINE NVME Statistics LS: Xmt 000000000e Cmpl 000000000e Abort 00000000 LS XMIT: Err 00000000 CMPL: xb 00000000 Err 00000000 Total FCP Cmpl 00000000000008ea Issue 00000000000008ec OutIO 0000000000000002 abort 00000000 noxri 00000000 nondlp 00000000 qdepth 00000000 wqerr 00000000 err 00000000 FCP CMPL: xb 00000000 Err 00000000これらの
host-traddrとtraddrの値を使用して、Subsystem NVMe Qualified Name (NQN) を検索します。# nvme discover --transport fc \ --traddr nn-0x204600a098cbcac6:pn-0x204700a098cbcac6 \ --host-traddr nn-0x20000090fae0b5f5:pn-0x10000090fae0b5f5 Discovery Log Number of Records 2, Generation counter 49530 =====Discovery Log Entry 0====== trtype: fc adrfam: fibre-channel subtype: nvme subsystem treq: not specified portid: 0 trsvcid: none subnqn: nqn.1992-08.com.netapp:sn.e18bfca87d5e11e98c0800a098cbcac6:subsystem.st14_nvme_ss_1_1 traddr: nn-0x204600a098cbcac6:pn-0x204700a098cbcac6nn-0x204600a098cbcac6:pn-0x204700a098cbcac6 を、
traddrに置き換えます。nn-0x20000090fae0b5f5:pn-0x10000090fae0b5f5 を、
host-traddrに置き換えます。nvme-cliを使用して NVMe コントローラーに接続します。# nvme connect --transport fc \ --traddr nn-0x204600a098cbcac6:pn-0x204700a098cbcac6 \ --host-traddr nn-0x20000090fae0b5f5:pn-0x10000090fae0b5f5 \ -n nqn.1992-08.com.netapp:sn.e18bfca87d5e11e98c0800a098cbcac6:subsystem.st14_nvme_ss_1_1 \ -k 5注記接続時間がデフォルトの keep-alive タイムアウト値を超えると
keep-alive timer (5 seconds) expired!と表示される場合は、-kオプションを使用して値を増やします。たとえば、-k 7を使用できます。ここでは、以下のようになります。
nn-0x204600a098cbcac6:pn-0x204700a098cbcac6 を、
traddrに置き換えます。nn-0x20000090fae0b5f5:pn-0x10000090fae0b5f5 を、
host-traddrに置き換えます。nqn.1992-08.com.netapp:sn.e18bfca87d5e11e98c0800a098cbcac6:subsystem.st14_nvme_ss_1_1 を、
subnqnに置き換えます。5 を keep-alive タイムアウト値 (秒単位) に置き換えます。
検証
現在接続されている NVMe デバイスのリストを表示します。
# nvme list Node SN Model Namespace Usage Format FW Rev ---------------- -------------------- ---------------------------------------- --------- -------------------------- ---------------- -------- /dev/nvme0n1 80BgLFM7xMJbAAAAAAAC NetApp ONTAP Controller 1 107.37 GB / 107.37 GB 4 KiB + 0 B FFFFFFFF # lsblk |grep nvme nvme0n1 259:0 0 100G 0 disk
11.2. QLogic アダプターの NVMe ホストの設定
NVMe 管理コマンドラインインターフェイス (nvme-cli) ユーティリティーを使用して、Qlogic アダプターで Non-volatile Memory Express™ (NVMe™) ホストを設定できます。
手順
nvme-cliユーティリティーをインストールします。# dnf install nvme-cliこれにより、
/etc/nvme/ディレクトリーにhostnqnファイルが作成されます。hostnqnファイルは、NVMe ホストを識別します。qla2xxxを再読み込みします。# modprobe -r qla2xxx # modprobe qla2xxxローカルポートとリモートポートのワールドワイドノード名 (WWNN) とワールドワイドポート名 (WWPN) 識別子を見つけます。
# dmesg |grep traddr [ 6.139862] qla2xxx [0000:04:00.0]-ffff:0: register_localport: host-traddr=nn-0x20000024ff19bb62:pn-0x21000024ff19bb62 on portID:10700 [ 6.241762] qla2xxx [0000:04:00.0]-2102:0: qla_nvme_register_remote: traddr=nn-0x203b00a098cbcac6:pn-0x203d00a098cbcac6 PortID:01050dこれらの
host-traddrとtraddrの値を使用して、Subsystem NVMe Qualified Name (NQN) を検索します。# nvme discover --transport fc \ --traddr nn-0x203b00a098cbcac6:pn-0x203d00a098cbcac6 \ --host-traddr nn-0x20000024ff19bb62:pn-0x21000024ff19bb62 Discovery Log Number of Records 2, Generation counter 49530 =====Discovery Log Entry 0====== trtype: fc adrfam: fibre-channel subtype: nvme subsystem treq: not specified portid: 0 trsvcid: none subnqn: nqn.1992-08.com.netapp:sn.c9ecc9187b1111e98c0800a098cbcac6:subsystem.vs_nvme_multipath_1_subsystem_468 traddr: nn-0x203b00a098cbcac6:pn-0x203d00a098cbcac6nn-0x203b00a098cbcac6:pn-0x203d00a098cbcac6 を、
traddrに置き換えます。nn-0x20000024ff19bb62:pn-0x21000024ff19bb62 を、
host-traddrに置き換えます。nvme-cliツールを使用して NVMe コントローラーに接続します。# nvme connect --transport fc \ --traddr nn-0x203b00a098cbcac6:pn-0x203d00a098cbcac6 \ --host-traddr nn-0x20000024ff19bb62:pn-0x21000024ff19bb62 \ -n nqn.1992-08.com.netapp:sn.c9ecc9187b1111e98c0800a098cbcac6:subsystem.vs_nvme_multipath_1_subsystem_468\ -k 5注記接続時間がデフォルトの keep-alive タイムアウト値を超えると
keep-alive timer (5 seconds) expired!と表示される場合は、-kオプションを使用して値を増やします。たとえば、-k 7を使用できます。ここでは、以下のようになります。
nn-0x203b00a098cbcac6:pn-0x203d00a098cbcac6 を、
traddrに置き換えます。nn-0x20000024ff19bb62:pn-0x21000024ff19bb62 を、
host-traddrに置き換えます。nqn.1992-08.com.netapp:sn.c9ecc9187b1111e98c0800a098cbcac6:subsystem.vs_nvme_multipath_1_subsystem_468 を、
subnqnに置き換えます。5 を keep-live タイムアウト値 (秒単位) に置き換えます。
検証
現在接続されている NVMe デバイスのリストを表示します。
# nvme list Node SN Model Namespace Usage Format FW Rev ---------------- -------------------- ---------------------------------------- --------- -------------------------- ---------------- -------- /dev/nvme0n1 80BgLFM7xMJbAAAAAAAC NetApp ONTAP Controller 1 107.37 GB / 107.37 GB 4 KiB + 0 B FFFFFFFF # lsblk |grep nvme nvme0n1 259:0 0 100G 0 disk
第12章 NVMe/TCP を使用した NVMe over Fabrics の設定
Non-volatile Memory Express™ (NVMe™) over TCP (NVMe/TCP) セットアップでは、ホストモードは完全にサポートされており、コントローラーセットアップはサポートされていません。
Red Hat は NVMe ターゲット (nvmet) 機能をサポートしていません。NVMe over Fabrics ブロックストレージターゲットデバイスを設定する方法については、ストレージ製造元のドキュメントを参照してください。
RHEL 9 では、ネイティブ NVMe マルチパスがデフォルトで有効になっています。DM マルチパスの有効化は、NVMe/TCP ではサポートされていません。
12.1. NVMe/TCP ホストの設定
NVMe 管理コマンドラインインターフェイス (nvme-cli) ツールを使用して、Non-volatile Memory Express™ (NVMe™) over TCP (NVMe/TCP) ホストを設定できます。
手順
nvme-cliツールをインストールします。# dnf install nvme-cliこのツールは、NVMe ホストを識別する
hostnqnファイルを/etc/nvme/ディレクトリーに作成します。nvme
hostidとhostnqnを見つけます。# cat /etc/nvme/hostnqn nqn.2014-08.org.nvmexpress:uuid:8ae2b12c-3d28-4458-83e3-658e571ed4b8 # cat /etc/nvme/hostid 09e2ce17-ccc9-412d-8dcf-2b0a1d581ee3hostid値およびhostnqnの値を使用して、NVMe/TCP コントローラーを設定します。コントローラーのステータスを確認します。
# nmcli device show ens6 GENERAL.DEVICE: ens6 GENERAL.TYPE: ethernet GENERAL.HWADDR: 52:57:02:12:02:02 GENERAL.MTU: 1500 GENERAL.STATE: 30 (disconnected) GENERAL.CONNECTION: -- GENERAL.CON-PATH: -- WIRED-PROPERTIES.CARRIER: on静的 IP アドレスを使用して、新しくインストールされたイーサネットコントローラーのホストネットワークを設定します。
# nmcli connection add con-name ens6 ifname ens6 type ethernet ip4 192.168.101.154/24 gw4 192.168.101.1ここで、192.168.101.154 をホスト IP アドレスに置き換えます。
# nmcli connection mod ens6 ipv4.method manual # nmcli connection up ens6NVMe/TCP ホストを NVMe/TCP コントローラーに接続するための新しいネットワークが作成されるため、コントローラーでもこの手順を実行します。
検証
新しく作成されたホストネットワークが正しく機能するかどうかを確認します。
# nmcli device show ens6 GENERAL.DEVICE: ens6 GENERAL.TYPE: ethernet GENERAL.HWADDR: 52:57:02:12:02:02 GENERAL.MTU: 1500 GENERAL.STATE: 100 (connected) GENERAL.CONNECTION: ens6 GENERAL.CON-PATH: /org/freedesktop/NetworkManager/ActiveConnection/5 WIRED-PROPERTIES.CARRIER: on IP4.ADDRESS[1]: 192.168.101.154/24 IP4.GATEWAY: 192.168.101.1 IP4.ROUTE[1]: dst = 192.168.101.0/24, nh = 0.0.0.0, mt = 101 IP4.ROUTE[2]: dst = 192.168.1.1/32, nh = 0.0.0.0, mt = 101 IP4.ROUTE[3]: dst = 0.0.0.0/0, nh = 192.168.1.1, mt = 101 IP6.ADDRESS[1]: fe80::27ce:dde1:620:996c/64 IP6.GATEWAY: -- IP6.ROUTE[1]: dst = fe80::/64, nh = ::, mt = 101
12.2. NVMe/TCP ホストを NVMe/TCP コントローラーに接続する
NVMe™ over TCP (NVMe/TCP) ホストを NVMe/TCP コントローラーシステムに接続して、NVMe/TCP ホストが名前空間にアクセスできるようになったことを確認します。
NVMe/TCP コントローラー (nvmet-tcp) モジュールはサポートされていません。
前提条件
- NVMe/TCP ホストを設定している。詳細は NVMe/TCP ホストの設定 を参照してください。
- 外部ストレージソフトウェアを使用して NVMe/TCP コントローラーを設定し、コントローラーでネットワークを設定しました。この手順では、192.168.101.55 が NVMe/TCP コントローラーの IP アドレスです。
手順
nvme_tcpモジュールをロードしていない場合はロードします。# modprobe nvme-tcpNVMe コントローラーで使用可能なサブシステムを検出します。
# nvme discover --transport=tcp --traddr=192.168.101.55 --host-traddr=192.168.101.154 --trsvcid=8009 Discovery Log Number of Records 2, Generation counter 7 =====Discovery Log Entry 0====== trtype: tcp adrfam: ipv4 subtype: current discovery subsystem treq: not specified, sq flow control disable supported portid: 2 trsvcid: 8009 subnqn: nqn.2014-08.org.nvmexpress.discovery traddr: 192.168.101.55 eflags: not specified sectype: none =====Discovery Log Entry 1====== trtype: tcp adrfam: ipv4 subtype: nvme subsystem treq: not specified, sq flow control disable supported portid: 2 trsvcid: 8009 subnqn: nqn.2014-08.org.nvmexpress:uuid:0c468c4d-a385-47e0-8299-6e95051277db traddr: 192.168.101.55 eflags: not specified sectype: noneここで、192.168.101.55 は NVMe/TCP コントローラーの IP アドレスで、192.168.101.154 は NVMe/TCP ホストの IP アドレスです。
/etc/nvme/discovery.confファイルを設定して、nvme discoverコマンドで使用されるパラメーターを追加します。# echo "--transport=tcp --traddr=192.168.101.55 --host-traddr=192.168.101.154 --trsvcid=8009" >> /etc/nvme/discovery.confNVMe/TCP ホストをコントローラーシステムに接続します。
# nvme connect-allNVMe/TCP 接続を永続化します。
# systemctl enable nvmf-autoconnect.service
検証
NVMe/TCP ホストが名前空間にアクセスできることを確認します。
# nvme list-subsys nvme-subsys3 - NQN=nqn.2014-08.org.nvmexpress:uuid:0c468c4d-a385-47e0-8299-6e95051277db \ +- nvme3 tcp traddr=192.168.101.55,trsvcid=8009,host_traddr=192.168.101.154 live optimized # nvme list Node Generic SN Model Namespace Usage Format FW Rev --------------------- --------------------- -------------------- ---------------------------------------- --------- -------------------------- ---------------- -------- /dev/nvme3n1 /dev/ng3n1 d93a63d394d043ab4b74 Linux 1 21.47 GB / 21.47 GB 512 B + 0 B 5.18.5-2
12.3. NVMe ホスト認証の設定
NVMe over Fabrics (NVMe-oF) コントローラーとの認証された接続を確立するには、Non-volatile Memory Express (NVMe) ホストで認証を設定できます。NVMe 認証では、共有シークレットまたはシークレットのペアと、チャレンジレスポンスプロトコル (NVMe DH-HMAC-CHAP など) が使用されます。
NVMe 認証は、NVMe/TCP トランスポートタイプでのみサポートされます。この機能は、NVMe over Remote Direct Memory Access (NVMe/RDMA) や NVMe over Fibre Channel (NVMe/FC) などの他のトランスポートでは使用できません。
前提条件
-
nvme-cliパッケージがインストールされている。 -
双方向認証を使用する場合は、Host NVMe Qualified Name (Host NQN) と Subsystem NVMe Qualified Name (Subsystem NQN) を把握している。システムのデフォルトの Host NQN を確認するには、
nvme show-hostnqnqを実行します。
手順
認証シークレットを生成します。
ホストの場合:
# hostkey=$(nvme gen-dhchap-key -n ${HOSTNQN})サブシステムの場合:
# ctrlkey= $(nvme gen-dhchap-key -n ${SUBSYSTEM})
認証用にホストを設定します。
# nvme connect -t tcp -n ${SUBSYSTEM} -a ${TRADDR} -s 4420 --dhchap-secret=${hostkey} --dhchap-ctrl-secret=${ctrlkey}これにより、
nvme-connectユーティリティーに認証シークレットが提供され、認証が行われ、ターゲットへの接続が確立されます。-
オプション: 自動ログインを有効にするには、永続的な NVMe fabrics 設定をセットアップします。これを行うには、
--dhchap-secretおよび--dhchap-ctrl-secretパラメーターを/etc/nvme/discovery.confまたは/etc/nvme/config.jsonに追加します。
-
オプション: 自動ログインを有効にするには、永続的な NVMe fabrics 設定をセットアップします。これを行うには、
検証
NVMe ストレージが接続されていることを確認します。
# nvme list現在ホストに接続されている NVMe デバイスのリストが表示されます。予期したストレージがリストされ、ストレージサーバーへの接続が成功したことを確認します。
第13章 NVMe デバイスでのマルチパスの有効化
ファイバーチャネル (FC) などのファブリックトランスポートを介して、システムに接続されている Non-volatile Memory Express™ (NVMe™) デバイスをマルチパスすることができます。複数のマルチパスソリューションを選択することができます。
13.1. ネイティブ NVMe マルチパスと DM Multipath
Non-volatile Memory Express™ (NVMe™) デバイスは、ネイティブなマルチパス機能をサポートしています。NVMe にマルチパスを設定する場合、標準の DM Multipath フレームワークと NVMe のネイティブなマルチパスのどちらかを選択できます。
DM Multipath と NVMe のネイティブマルチパスは、どちらも NVMe デバイスのマルチパス方式である ANA(Asymmetric Namespace Access) に対応しています。ANA は、コントローラーとホスト間の最適化されたパスを特定し、パフォーマンスを向上させます。
ネイティブ NVMe マルチパスを有効にすると、すべての NVMe デバイスにグローバルに適用されます。より高いパフォーマンスを提供できますが、DM Multipath が提供するすべての機能は含まれていません。例えば、ネイティブの NVMe マルチパスは、numa と round-robin のパス選択方法のみをサポートしています。
デフォルトでは、NVMe マルチパスは Red Hat Enterprise Linux 9 で有効になっており、これは推奨されるマルチパスソリューションです。
13.2. NVMe デバイスでの DM Multipath の有効化
nvme_core.multipath オプションのデフォルトのカーネル設定は Y に設定されています。これは、ネイティブ Non-volatile Memory Express™ (NVMe™) マルチパスが有効であることを意味します。ネイティブ NVMe マルチパスを無効にすることで、接続された NVMe デバイスで DM マルチパスを有効にできます。
前提条件
- NVMe デバイスがシステムに接続されていることを確認します。詳細は、NVMe over fabric デバイスの概要 を参照してください。
手順
ネイティブ NVMe マルチパスが有効になっているかどうかを確認します。
# cat /sys/module/nvme_core/parameters/multipathコマンドは以下のいずれかを表示します。
N- ネイティブ NVMe マルチパスは無効です。
Y- ネイティブ NVMe マルチパスは有効です。
ネイティブ NVMe マルチパスが有効になっている場合は、次のいずれかの方法を使用して無効にします。
カーネルオプションの使用
nvme_core.multipath=Nオプションをコマンドラインに追加します。# grubby --update-kernel=ALL --args="nvme_core.multipath=N"64 ビットの IBM Z アーキテクチャーでは、ブートメニューを更新します。
# zipl- システムを再起動します。
カーネルモジュール設定ファイルの使用
以下の内容で
/etc/modprobe.d/nvme_core.conf設定ファイルを作成します。options nvme_core multipath=Ninitramfsファイルをバックアップします。# cp /boot/initramfs-$(uname -r).img /boot/initramfs-$(uname -r).bak.$(date +%m%d-%H%M%S).imginitramfsを再構築します。# cp /boot/initramfs-$(uname -r).img /boot/initramfs-$(uname -r).bak.$(date +%m-%d-%H%M%S).img # dracut --force --verbose- システムを再起動します。
DM マルチパスを有効にします。
# systemctl enable --now multipathd.service利用可能なすべてのパスに I/O を分配します。
/etc/multipath.confファイルに以下の内容を追加します。devices { device { vendor "NVME" product ".*" path_grouping_policy group_by_prio } }注記DM Multipath が NVMe デバイスを管理する場合、
/sys/class/nvme-subsystem/nvme-subsys0/iopolicy設定ファイルは I/O ディストリビューションには影響を与えません。設定の変更を適用するために、
multipathdサービスをリロードします。# multipath -r
検証
ネイティブ NVMe マルチパスが無効になっているかどうかを確認します。
# cat /sys/module/nvme_core/parameters/multipath NDM Multipath が NVMe デバイスを認識しているかどうかを確認します。
# multipath -l eui.00007a8962ab241100a0980000d851c8 dm-6 NVME,NetApp E-Series size=20G features='0' hwhandler='0' wp=rw `-+- policy='service-time 0' prio=0 status=active |- 0:10:2:2 nvme0n2 259:3 active undef running `-+- policy='service-time 0' prio=0 status=enabled |- 4:11:2:2 nvme4n2 259:28 active undef running `-+- policy='service-time 0' prio=0 status=enabled |- 5:32778:2:2 nvme5n2 259:38 active undef running `-+- policy='service-time 0' prio=0 status=enabled |- 6:32779:2:2 nvme6n2 259:44 active undef running
13.3. ネイティブ NVMe マルチパスの実現
ネイティブ NVMe マルチパスが無効になっている場合は、次の解決策を使用して有効にできます。
前提条件
- NVMe デバイスがシステムに接続されていることを確認します。詳細は、NVMe over fabric デバイスの概要 を参照してください。
手順
カーネルでネイティブ NVMe マルチパスが有効になっているかどうかを確認します。
# cat /sys/module/nvme_core/parameters/multipathコマンドは以下のいずれかを表示します。
N- ネイティブ NVMe マルチパスは無効です。
Y- ネイティブ NVMe マルチパスは有効です。
ネイティブ NVMe マルチパスが無効になっている場合は、次のいずれかの方法を使用して有効にします。
カーネルオプションの使用
カーネルコマンドラインから
nvme_core.multipath=Nオプションを削除します。# grubby --update-kernel=ALL --remove-args="nvme_core.multipath=N"64 ビットの IBM Z アーキテクチャーでは、ブートメニューを更新します。
# zipl- システムを再起動します。
カーネルモジュール設定ファイルの使用
/etc/modprobe.d/nvme_core.conf設定ファイルを削除します。# rm /etc/modprobe.d/nvme_core.confinitramfsファイルをバックアップします。# cp /boot/initramfs-$(uname -r).img /boot/initramfs-$(uname -r).bak.$(date +%m-%d-%H%M%S).imginitramfsを再構築します。# dracut --force --verbose- システムを再起動します。
オプション: 実行中のシステムで、NVMe デバイスの I/O ポリシーを変更して、利用可能なすべてのパスに I/O を分散させます。
# echo "round-robin" > /sys/class/nvme-subsystem/nvme-subsys0/iopolicyオプション:
udevルールを使用して I/O ポリシーを永続的に設定します。以下の内容で/etc/udev/rules.d/71-nvme-io-policy.rulesファイルを作成します。ACTION=="add|change", SUBSYSTEM=="nvme-subsystem", ATTR{iopolicy}="round-robin"
検証
システムが NVMe デバイスを認識しているかどうかを確認します。次の例は、2 つの NVMe 名前空間を持つ NVMe over fabrics ストレージサブシステムが接続されていることを想定しています:
# nvme list Node SN Model Namespace Usage Format FW Rev ---------------- -------------------- ---------------------------------------- --------- -------------------------- ---------------- -------- /dev/nvme0n1 a34c4f3a0d6f5cec Linux 1 250.06 GB / 250.06 GB 512 B + 0 B 4.18.0-2 /dev/nvme0n2 a34c4f3a0d6f5cec Linux 2 250.06 GB / 250.06 GB 512 B + 0 B 4.18.0-2接続されているすべての NVMe サブシステムをリストアップします。
# nvme list-subsys nvme-subsys0 - NQN=testnqn \ +- nvme0 fc traddr=nn-0x20000090fadd597a:pn-0x10000090fadd597a host_traddr=nn-0x20000090fac7e1dd:pn-0x10000090fac7e1dd live +- nvme1 fc traddr=nn-0x20000090fadd5979:pn-0x10000090fadd5979 host_traddr=nn-0x20000090fac7e1dd:pn-0x10000090fac7e1dd live +- nvme2 fc traddr=nn-0x20000090fadd5979:pn-0x10000090fadd5979 host_traddr=nn-0x20000090fac7e1de:pn-0x10000090fac7e1de live +- nvme3 fc traddr=nn-0x20000090fadd597a:pn-0x10000090fadd597a host_traddr=nn-0x20000090fac7e1de:pn-0x10000090fac7e1de liveアクティブトランスポートタイプを確認します。例えば、
nvme0 fcはファイバーチャネルトランスポートで接続されていることを示し、nvme tcpは TCP で接続されていることを示しています。カーネルオプションを編集した場合は、カーネルコマンドラインでネイティブ NVMe マルチパスが有効になっているかどうかを確認します。
# cat /proc/cmdline BOOT_IMAGE=[...] nvme_core.multipath=YI/O ポリシーを変更した場合は、NVMe デバイス上で
round-robinがアクティブな I/O ポリシーであるかどうかを確認します。# cat /sys/class/nvme-subsystem/nvme-subsys0/iopolicy round-robin
第14章 リモートディスクレスシステムの設定
ネットワーク環境では、リモートディスクレスシステムをデプロイすることで、同一の設定で複数のクライアントをセットアップできます。現在の Red Hat Enterprise Linux サーバーバージョンを使用すると、これらのクライアントのハードドライブのコストを節約し、別のサーバーにゲートウェイを設定できます。
次の図は、Dynamic Host Configuration Protocol (DHCP) および Trivial File Transfer Protocol (TFTP) サービスを介したディスクレスクライアントとサーバーの接続を示しています。
図14.1 リモートディスクレスシステム設定のダイアグラム

14.1. リモートディスクレスシステムの環境の準備
リモートディスクレスシステムの実装を続行できるように環境を準備します。リモートディスクレスシステムの起動には次のサービスが必要です。
- tftp-server によって提供される Trivial File Transfer Protocol (TFTP) サービス。システムは、tftp サービスを使用して、Preboot Execution Environment (PXE) ローダーを通じてネットワーク経由でカーネルイメージと初期 RAM ディスク initrd を取得します。
- dhcp によって提供される Dynamic Host Configuration Protocol (DHCP) サービス。
前提条件
- ネットワーク接続が設定されている。
手順
dracut-networkパッケージをインストールします。# dnf install dracut-network/etc/dracut.conf.d/network.confファイルに次の行を追加します。add_dracutmodules+=" nfs "次の順序でサービスを設定して、環境内のリモートディスクレスシステムが正しく機能するようにします。
- TFTP サービスを設定します。詳細は、ディスクレスクライアントの TFTP サービスの設定 を参照してください。
- DHCP サーバーを設定します。詳細は、ディスクレスクライアントの DHCP サーバーの設定 を参照してください。
- ネットワークファイルシステム (NFS) とエクスポートしたファイルシステムを設定します。詳細は、ディスクレスクライアントのエクスポートしたファイルシステムの設定 を参照してください。
14.2. ディスクレスクライアントの TFTP サービスの設定
リモートディスクレスシステムを環境内で正しく機能させるには、まずディスクレスクライアントの Trivial File Transfer Protocol (TFTP) サービスを設定する必要があります。
この設定は、Unified Extensible Firmware Interface (UEFI) 経由では起動しません。UEFI ベースのインストールの場合は、UEFI ベースのクライアント向けに TFTP サーバーを設定する を参照してください。
前提条件
次のパッケージがインストールされている。
-
tftp-server -
syslinux
-
手順
TFTPサービスを有効にします。# systemctl enable --now tftptftpのルートディレクトリーにpxelinuxディレクトリーを作成します。# mkdir -p /var/lib/tftpboot/pxelinux//usr/share/syslinux/pxelinux.0ファイルを/var/lib/tftpboot/pxelinux/ディレクトリーにコピーします。# cp /usr/share/syslinux/pxelinux.0 /var/lib/tftpboot/pxelinux//usr/share/syslinux/ldlinux.c32を/var/lib/tftpboot/pxelinux/にコピーします。# cp /usr/share/syslinux/ldlinux.c32 /var/lib/tftpboot/pxelinux/tftpのルートディレクトリーにpxelinux.cfgディレクトリーを作成します。# mkdir -p /var/lib/tftpboot/pxelinux/pxelinux.cfg/
検証
サービス
tftpのステータスを確認します。# systemctl status tftp ... Active: active (running) ...
14.3. ディスクレスクライアントの DHCP サーバーの設定
リモートディスクレスシステムを正しく機能させるには、いくつかのサービスをあらかじめインストールしておく必要があります。
前提条件
- Trivial File Transfer Protocol (TFTP) サービスがインストールされている。
次のパッケージがインストールされている。
-
dhcp-server
-
-
ディスクレスクライアントの
tftpサービスが設定されている。詳細は、ディスクレスクライアントの TFTP サービスの設定 を参照してください。
手順
/etc/dhcp/dhcpd.confファイルに次の設定を追加して、DHCP サーバーをセットアップし、ブート用の Preboot Execution Environment (PXE) を有効にします。option space pxelinux; option pxelinux.magic code 208 = string; option pxelinux.configfile code 209 = text; option pxelinux.pathprefix code 210 = text; option pxelinux.reboottime code 211 = unsigned integer 32; option architecture-type code 93 = unsigned integer 16; subnet 192.168.205.0 netmask 255.255.255.0 { option routers 192.168.205.1; range 192.168.205.10 192.168.205.25; class "pxeclients" { match if substring (option vendor-class-identifier, 0, 9) = "PXEClient"; next-server 192.168.205.1; if option architecture-type = 00:07 { filename "BOOTX64.efi"; } else { filename "pxelinux/pxelinux.0"; } } }DHCP 設定は、リース時間や固定アドレスの設定など、環境によって異なる場合があります。詳細は、DHCP サービスの提供 を参照してください。
注記libvirt仮想マシンをディスクレスクライアントとして使用する場合、libvirtデーモンが DHCP サービスを提供し、スタンドアロン DHCP サーバーは使用されません。この状況では、libvirtネットワーク設定のvirsh net-editでbootp file=<filename>オプションを使用して、ネットワークブートを有効にする必要があります。dhcpd.serviceを有効にします。# systemctl enable --now dhcpd.service
検証
サービス
dhcpd.serviceのステータスを確認します。# systemctl status dhcpd.service ... Active: active (running) ...
14.4. ディスクレスクライアントのエクスポートしたファイルシステムの設定
環境にリモートディスクレスシステムを設定する一環として、ディスクレスクライアント用にエクスポートしたファイルシステムを設定する必要があります。
前提条件
-
ディスクレスクライアントの
tftpサービスが設定されている。ディスクレスクライアントの TFTP サービスの設定 セクションを参照してください。 - Dynamic Host Configuration Protocol (DHCP) サーバーが設定されている。ディスクレスクライアントの DHCP サーバーの設定 セクションを参照してください。
手順
-
/etc/exportsディレクトリーにルートディレクトリーを追加して、ルートディレクトリーをエクスポートするようにネットワークファイルシステム (NFS) サーバーを設定します。手順の詳細は、NFS サーバーのデプロイ を参照してください。 完全にディスクレスのクライアントに対応できるように、Red Hat Enterprise Linux の完全なバージョンをルートディレクトリーにインストールします。これを行うには、新しいベースシステムをインストールするか、既存のインストールのクローンを作成します。
exported-root-directory をエクスポートしたファイルシステムへのパスに置き換えて、エクスポートした場所に Red Hat Enterprise Linux をインストールします。
# dnf install @Base kernel dracut-network nfs-utils --installroot=exported-root-directory --releasever=/releaseverオプションを/に設定すると、releasever がホスト (/) システムから検出されます。rsyncユーティリティーを使用して、実行中のシステムと同期します。# rsync -a -e ssh --exclude='/proc/' --exclude='/sys/' example.com:/ exported-root-directory-
example.com は、
rsyncユーティリティーで同期する実行中のシステムのホスト名に置き換えます。 exported-root-directory を、エクスポートしたファイルシステムへのパスに置き換えます。
このオプションには、実行中の別のシステムが必要です。これは、このコマンドでサーバーにクローンを作成します。
-
example.com は、
ファイルシステムをディスクレスクライアントで使用する前に、エクスポートの準備が完了しているファイルシステムを設定します。
ディスクレスクライアントがサポートするカーネル (
vmlinuz-_kernel-version_pass:attributes) をtftpブートディレクトリーにコピーします。# cp /exported-root-directory/boot/vmlinuz-kernel-version /var/lib/tftpboot/pxelinux/initramfs-kernel-version.imgファイルをローカルに作成し、NFS をサポートするエクスポートされたルートディレクトリーに移動します。# dracut --add nfs initramfs-kernel-version.img kernel-version以下に例を示します。
# dracut --add nfs /exports/root/boot/initramfs-5.14.0-202.el9.x86_64.img 5.14.0-202.el9.x86_64現在実行中のカーネルバージョンを使用し、既存のイメージを上書きして initrd を作成する例を以下に示します。
# dracut -f --add nfs "boot/initramfs-$(uname -r).img" "$(uname -r)"initrdのファイル権限を0644に変更します。# chmod 0644 /exported-root-directory/boot/initramfs-kernel-version.img警告initrdのファイル権限を変更しないと、pxelinux.0ブートローダーが "file not found" エラーを表示して失敗します。作成された
initramfs-kernel-version.imgファイルをtftpブートディレクトリーにコピーします。# cp /exported-root-directory/boot/initramfs-kernel-version.img /var/lib/tftpboot/pxelinux//var/lib/tftpboot/pxelinux/pxelinux.cfg/defaultファイルに次の設定を追加して、initrdとカーネルを使用するためのデフォルトのブート設定を編集します。default rhel9 label rhel9 kernel vmlinuz-kernel-version append initrd=initramfs-kernel-version.img root=nfs:_server-ip_:/exported-root-directory rwこの設定は、ディスクレスクライアントのルートに、
/exported-root-directoryエクスポートファイルシステムを読み取り/書き込み形式でマウントするように指示します。オプション:
/var/lib/tftpboot/pxelinux/pxelinux.cfg/defaultファイルを次の設定で編集して、ファイルシステムをread-only形式でマウントします。+
default rhel9
label rhel9
kernel vmlinuz-_kernel-version_
append initrd=initramfs-_kernel-version_.img root=nfs:pass:attributes[{blank}]_server-ip_:pass:attributes[{blank}]/_exported-root-directory_ roNFS サーバーを再起動します。
# systemctl restart nfs-server.service
これで、NFS 共有をディスクレスクライアントにエクスポートできるようになりました。これらのクライアントは、Preboot Execution Environment (PXE) 経由でネットワーク経由で起動できます。
14.5. リモートディスクレスシステムの再設定
パッケージのインストール、サービスの再起動、または問題のデバッグを行う場合は、システムを再設定できます。
前提条件
-
エクスポートしたファイルシステムで
no_root_squashオプションが有効になっている。
手順
ユーザーパスワードを変更します。
コマンドラインを /exported/root/directory に変更します。
# chroot /exported/root/directory /bin/bash必要なユーザーのパスワードを変更します。
# passwd <username><username> は、パスワードを変更する実際のユーザーに置き換えます。
- コマンドラインを終了します。
リモートディスクレスシステムにソフトウェアをインストールします。
# dnf install <package> --installroot=/exported/root/directory --releasever=/ --config /etc/dnf/dnf.conf --setopt=reposdir=/etc/yum.repos.d/<package> を、インストールする実際のパッケージに置き換えます。
- 2 つの個別のエクスポートを設定して、リモートディスクレスシステムを /usr と /var に分割します。詳細は、NFS サーバーのデプロイ を参照してください。
14.6. リモートディスクレスシステムのロードに関する一般的な問題のトラブルシューティング
以前の設定を利用すると、リモートディスクレスシステムのロード中に問題が発生する可能性があります。以下に、Red Hat Enterprise Linux サーバーで最も一般的な問題とそのトラブルシューティングの例をいくつか示します。
例14.1 クライアントが IP アドレスを取得しない
サーバー上で Dynamic Host Configuration Protocol (DHCP) サービスが有効になっているかどうかを確認します。
dhcp.serviceが実行しているかどうかを確認します。# systemctl status dhcpd.servicedhcp.serviceが非アクティブな場合は、有効にして起動します。# systemctl enable dhcpd.service # systemctl start dhcpd.service- ディスクレスクライアントを再起動します。
-
DHCP 設定ファイル
/etc/dhcp/dhcpd.confを確認します。詳細は、ディスクレスクライアントの DHCP サーバーの設定 を参照してください。
ファイアウォールポートが開いているかどうかを確認します。
dhcp.serviceがアクティブなサービスにリストされているかどうかを確認します。# firewall-cmd --get-active-zones # firewall-cmd --info-zone=publicdhcp.serviceがアクティブなサービスにリストされていない場合は、リストに追加します。# firewall-cmd --add-service=dhcp --permanentnfs.serviceがアクティブなサービスに記載されているかどうかを確認します。# firewall-cmd --get-active-zones # firewall-cmd --info-zone=publicnfs.serviceがアクティブなサービスに記載されていない場合は、これをリストに追加します。# firewall-cmd --add-service=nfs --permanent
例14.2 リモートディスクレスシステムの起動時にファイルを使用できない
-
ファイルが
/var/lib/tftpboot/ディレクトリーにあるかどうかを確認します。 ファイルがディレクトリー内にある場合は、ファイルに次の権限があるかどうかを確認します。
# chmod 644 pxelinux.0- ファイアウォールポートが開いているかどうかを確認します。
例14.3 kernel/initrd のロード後にシステムの起動に失敗した
サーバーで NFS サービスが有効になっているかどうかを確認します。
nfs.serviceが実行中かどうかを確認します。# systemctl status nfs.servicenfs.serviceが非アクティブな場合は、それを起動して有効にする必要があります。# systemctl start nfs.service # systemctl enable nfs.service
-
/var/lib/tftpboot/pxelinux.cfg/ディレクトリーでパラメーターが正しいかどうかを確認してください。詳細は、ディスクレスクライアントのエクスポートしたファイルシステムの設定 を参照してください。 - ファイアウォールポートが開いているかどうかを確認します。
第15章 スワップの使用
スワップ領域を使用して、非アクティブなプロセスとデータに一時的なストレージを提供し、物理メモリーがいっぱいになった場合に発生するメモリー不足エラーを防ぎます。スワップ領域は物理メモリーの拡張として機能し、物理メモリーが使い果たされた場合でもシステムがスムーズに動作し続けることを可能にします。スワップ領域を使用するとシステムのパフォーマンスが低下する可能性があるため、スワップ領域を利用する前に物理メモリーの使用を最適化するほうが望ましい場合があることに注意してください。
15.1. スワップ領域の概要
Linux の スワップ領域 は、物理メモリー (RAM) が不足すると使用されます。システムに多くのメモリーリソースが必要で、RAM が不足すると、メモリーの非アクティブなページがスワップ領域に移動します。スワップ領域は、RAM が少ないマシンで役に立ちますが、RAM の代わりに使用しないようにしてください。
スワップ領域はハードドライブにあり、そのアクセス速度は物理メモリーに比べると遅くなります。スワップ領域の設定は、専用のスワップパーティション (推奨)、スワップファイル、またはスワップパーティションとスワップファイルの組み合せが考えられます。
過去数年、推奨されるスワップ領域のサイズは、システムの RAM サイズに比例して増加していました。しかし、最近のシステムには通常、数百ギガバイトの RAM が含まれます。結果として、推奨されるスワップ領域は、システムのメモリーではなく、システムメモリーのワークロードの機能とみなされます。
15.2. システムの推奨スワップ領域
スワップパーティションの適切なサイズは、最終的にはシステムメモリーの負荷量によって決まり、システムメモリー自体によって決まるわけではありません。ただし、以下の表は、システムに搭載されている RAM の容量に基づいて推奨されるスワップパーティションサイズの最小ガイドラインを示しています。これらのサイズは通常、インストール時に自動的に設定されます。
スワップパーティションのサイズは、インストール時に自動的に設定されます。ハイバネートを可能にするには、カスタムのパーティション分割段階でスワップ領域を編集する必要があります。
以下のガイドラインは、1GB 以下のメモリー容量の少ないシステムにおいて特に重要です。このようなシステムで十分なスワップ領域を割り当てられないと、システムが不安定になったり、インストールしたシステムが起動できなくなったりする可能性があります。
| システム内の RAM の容量 | 推奨されるスワップ領域 | ハイバネートを許可する場合に推奨されるスワップ領域 |
|---|---|---|
| 2 GiB 未満 | RAM 容量の 2 倍 | RAM 容量の 3 倍 |
| 2 GB - 8 GB | RAM 容量と同じ | RAM 容量の 2 倍 |
| 8 GB - 64 GB | 最低 4GB | RAM 容量の 1.5 倍 |
| 64 GiB を超える場合 | ワークロードによる (最小 4 GiB) | ハイバネートは推奨されない |
スワップ領域を複数のストレージデバイスに分散させると、特に高速ドライブ、コントローラー、およびインターフェイスを備えたシステムで、スワップ領域のパフォーマンスが向上します。
スワップ領域として割り当てたファイルシステムおよび LVM2 ボリュームは、変更時に 使用しない でください。システムプロセスまたはカーネルがスワップ領域を使用していると、スワップの修正に失敗します。free コマンドおよび cat /proc/swaps コマンドを使用して、スワップの使用量と、使用中の場所を確認します。
スワップ領域のサイズを変更するには、一時的にシステムからスワップ領域を削除する必要があります。これは、swapoff コマンドを使用してファイルのスワップボリュームを無効にすることで行います。これは、実行中のアプリケーションが追加のスワップ領域に依存し、メモリーが不足する可能性がある場合に問題になる可能性があります。
メモリー負荷が高い、またはページがロックされているためスワップを無効にするのに問題が発生する場合は、代わりにレスキューモードからスワップのサイズ変更を実行してください。デバッグブートオプション を参照してください。ファイルシステムをマウントするように指示されたら、 を選択します。
15.3. スワップ用の LVM2 論理ボリュームの作成
スワップ用の LVM2 論理ボリュームを作成できます。ここでは、追加するスワップボリュームを /dev/VolGroup00/LogVol02 とします。
前提条件
- 十分なディスク領域がある。
手順
サイズが 2 GB の LVM2 論理ボリュームを作成します。
# lvcreate VolGroup00 -n LogVol02 -L 2G新しいスワップ領域をフォーマットします。
# mkswap /dev/VolGroup00/LogVol02次のエントリーを
/etc/fstabファイルに追加します。/dev/VolGroup00/LogVol02 none swap defaults 0 0システムが新しい設定を登録するように、マウントユニットを再生成します。
# systemctl daemon-reload論理ボリュームでスワップをアクティブにします。
# swapon -v /dev/VolGroup00/LogVol02
検証
スワップ論理ボリュームが正常に作成され、アクティブになったかをテストするには、次のコマンドを使用して、アクティブなスワップ領域を調べます。
# cat /proc/swaps total used free shared buff/cache available Mem: 30Gi 1.2Gi 28Gi 12Mi 994Mi 28Gi Swap: 22Gi 0B 22Gi# free -h total used free shared buff/cache available Mem: 30Gi 1.2Gi 28Gi 12Mi 995Mi 28Gi Swap: 17Gi 0B 17Gi
15.4. 標準スワップパーティションの作成と管理
スワップ領域には標準のスワップパーティションを使用してください。fdisk や parted などの標準的なパーティション分割ツールを使用して、専用パーティションを作成できます。
前提条件
- ドライブには十分な未割り当てディスク容量があります。
-
ディスクデバイスの名前 (例:
/dev/sda) が分かっているはずです。
手順
ディスクのパーティションツールを起動します。たとえば、
/dev/sdaの場合です。$ fdisk /dev/sda希望するサイズの新しいパーティションを作成し、そのタイプを
Linux スワップに設定します。注記fdiskの場合、パーティションの種類を変更するには t コマンドを使用し、Linux のスワップの場合は 16 進数コード82を入力します。- 変更内容を書き込み、ユーティリティーを終了します。
新しいスワップパーティションをフォーマットします (新しいパーティションが
/dev/sda4であると仮定します)。# mkswap /dev/sda4起動時にスワップパーティションを有効にするには、
/etc/fstabファイルにエントリーを追加します。# /dev/sda4 none swap defaults 0 0マウントユニットを再生成して新しい設定を登録します。
# systemctl daemon-reloadスワップパーティションを直ちに有効化してください。
# swapon -v /dev/sda4
検証
スワップパーティションが作成され、アクティブ化されていることを確認するには、アクティブなスワップ領域を調べます。
# cat /proc/swaps # free -h
15.5. スワップファイルの作成
物理 RAM がいっぱいになったときにシステムクラッシュを防ぐ仮想メモリーを提供するスワップファイルを設定します。この方法は、ディスクのパーティションを再設定したり、既存のストレージ設定を変更したりせずに、追加のスワップ領域を確保する必要がある場合に特に便利です。
前提条件
- 十分なディスク領域がある。
手順
- 新しいスワップファイルのサイズをメガバイト単位で指定してから、そのサイズに 1024 をかけてブロック数を指定します。たとえばスワップファイルのサイズが 64 MB の場合は、ブロック数が 65536 になります。
空のファイルの作成:
# dd if=/dev/zero of=/swapfile bs=1024 count=6553665536 を、必要なブロックサイズと同じ値に置き換えます。
注記ext4 や XFS などの最新のファイルシステムでは、
ddの代わりにfallocate を使用する方が望ましいです。この方法はより高速で、不要なディスク I/O を回避できます。次のコマンドでスワップファイルをセットアップします。
# mkswap /swapfileスワップファイルのセキュリティーを変更して、全ユーザーで読み込みができないようにします。
# chmod 0600 /swapfileシステムの起動時にスワップファイルを有効にするには、次のエントリーを使用して
/etc/fstabファイルを編集します。/swapfile none swap defaults 0 0次にシステムが起動すると新しいスワップファイルが有効になります。
システムが新しい
/etc/fstab設定を登録するように、マウントユニットを再生成します。# systemctl daemon-reloadすぐにスワップファイルをアクティブにします。
# swapon /swapfile
検証
新しいスワップファイルが正常に作成され、有効になったかをテストするには、次のコマンドを使用して、アクティブなスワップ領域を調べます。
$ cat /proc/swaps$ free -h
15.6. storage RHEL システムロールを使用してスワップボリュームを作成する
storage RHEL システムロールを使用して、ブロックデバイス上にスワップボリュームを作成または変更できます。
前提条件
- コントロールノードと管理対象ノードの準備が完了している。
-
管理対象ノードへの接続に使用するアカウントに、そのノードに対する
sudo権限がある。
手順
次の内容を含む Playbook ファイル (例:
~/playbook.yml) を作成します。--- - name: Create a disk device with swap hosts: managed-node-01.example.com roles: - rhel-system-roles.storage vars: storage_volumes: - name: swap_fs type: disk disks: - /dev/sdb size: 15 GiB fs_type: swap現在、ボリューム名 (この例では
swap_fs) は任意です。storageロールは、disks:属性にリスト表示されているディスクデバイスでボリュームを特定します。Playbook の構文を検証します。
$ ansible-playbook --syntax-check ~/playbook.ymlこのコマンドは構文を検証するだけであり、有効だが不適切な設定から保護するものではないことに注意してください。
Playbook を実行します。
$ ansible-playbook ~/playbook.yml
15.7. LVM2 論理ボリュームでのスワップ領域の拡張
既存の LVM2 論理ボリューム上のスワップ領域を拡張できます。ここでは、2 GB 拡張するボリュームを /dev/VolGroup00/LogVol01 とします。
前提条件
- 十分なディスク領域がある。
手順
関連付けられている論理ボリュームのスワップ機能を無効にします。
# swapoff -v /dev/VolGroup00/LogVol01LVM2 論理ボリュームのサイズを 2 GB 増やします。
# lvresize /dev/VolGroup00/LogVol01 -L +2G新しいスワップ領域をフォーマットします。
# mkswap /dev/VolGroup00/LogVol01拡張論理ボリュームを有効にします。
# swapon -v /dev/VolGroup00/LogVol01
検証
スワップの論理ボリュームの拡張に成功したかどうかをテストするには、アクティブなスワップ容量を調べます。
# cat /proc/swaps Filename Type Size Used Priority /dev/dm-1 partition 16322556 0 -2 /dev/dm-4 partition 7340028 0 -3# free -h total used free shared buff/cache available Mem: 30Gi 1.2Gi 28Gi 12Mi 994Mi 28Gi Swap: 22Gi 0B 22Gi
15.8. LVM2 論理ボリュームでのスワップ領域の縮小
LVM2 論理ボリュームのスワップ領域を縮小できます。ここでは、縮小するボリュームを /dev/VolGroup00/LogVol01 とします。
手順
関連付けられている論理ボリュームのスワップ機能を無効にします。
# swapoff -v /dev/VolGroup00/LogVol01スワップ署名を削除します。
# wipefs -a /dev/VolGroup00/LogVol01LVM2 論理ボリュームのサイズを変更して 512 MB 削減します。
# lvreduce /dev/VolGroup00/LogVol01 -L -512M新しいスワップ領域をフォーマットします。
# mkswap /dev/VolGroup00/LogVol01論理ボリュームでスワップをアクティブにします。
# swapon -v /dev/VolGroup00/LogVol01
検証
スワップ論理ボリュームが正常に削減されたかをテストするには、次のコマンドを使用して、アクティブなスワップ領域を調べます。
$ cat /proc/swaps$ free -h
15.9. スワップ用の LVM2 論理ボリュームの削除
スワップ用の LVM2 論理ボリュームを削除できます。削除するスワップボリュームを /dev/VolGroup00/LogVol02 とします。
手順
関連付けられている論理ボリュームのスワップ機能を無効にします。
# swapoff -v /dev/VolGroup00/LogVol02LVM2 論理ボリュームを削除します。
# lvremove /dev/VolGroup00/LogVol02次の関連エントリーを
/etc/fstabファイルから削除します。/dev/VolGroup00/LogVol02 none swap defaults 0 0マウントユニットを再生成して新しい設定を登録します。
# systemctl daemon-reload
検証
論理ボリュームが正常に削除されたかどうかをテストし、次のコマンドを使用してアクティブなスワップ領域を調べます。
$ cat /proc/swaps$ free -h
15.10. スワップファイルの削除
スワップファイルを削除できます。
手順
/swapfileスワップファイルを無効にします。# swapoff -v /swapfile-
/etc/fstabファイルからエントリーを削除します。 システムが新しい設定を登録するように、マウントユニットを再生成します。
# systemctl daemon-reload実際のファイルを削除します。
# rm /swapfile
15.11. 仮想メモリー (仮想マシン) の調整項目を調整する
仮想メモリー (仮想マシン) チューニングパラメーターは、システムがメモリーをどのように管理するか、またスワップ領域をどれだけ積極的に使用するかなどを制御するカーネルパラメーターです。これらの設定を調整すると、ワークロードに応じてシステムのパフォーマンスに大きな影響を与える可能性があります。
vm.swappiness パラメーターは、カーネルがプロセスを物理メモリーからスワップ領域に移動させる傾向を制御します。値は 0 から 100 までのパーセンテージで表されます。
- 値が大きい場合 (例:60 または 100): カーネルはより積極的にプロセスをディスクにスワップします。これにより、物理メモリーを他の用途 (ファイルシステムキャッシュなど) に解放できますが、スワップ処理が頻繁に必要となる場合は、I/O 操作とレイテンシーが増加する可能性があります。
- 低い値 (例:0 または 10): カーネルはスワッピングを回避し、プロセスを可能な限り長く物理メモリーに保持しようとします。これは一般的に、高速な I/O と大容量の RAM を備えたデスクトップシステムやサーバーに適しています。
以下のその他の関連する仮想マシンチューニングパラメーターは、スワップの動作に影響を与える可能性があります。
- vm.dirty_ratio: カーネルが積極的に書き込みを開始する前に、ダーティーページ (変更されたがまだディスクに書き込まれていないメモリーページ) で埋めることができるシステムメモリーの割合。
-
vm.dirty_background_ratio: バックグラウンドカーネルプロセスがダーティーページを書き出す前に、ダーティーページで埋め尽くされるシステムメモリーの割合。これは、
vm.dirty_ratioよりも攻撃性の低いアクションです。
手順
現在の値を表示する:
$ cat /proc/sys/vm/swappinessデフォルト値は 60 です。
値を一時的に、たとえば 10 に設定します。
# sysctl vm.swappiness=10再起動後も設定が保持されるように永続的に設定するには、
/etc/sysctl.d/99-sysctl.conf または同様の設定ファイルを編集してください。vm.swappiness = 10変更を適用します。
# sysctl -p
第16章 Fibre Channel over Ethernet の設定
IEEE T11 FC-BB-5 標準に基づく Fibre Channel over Ethernet (FCoE) は、イーサネットネットワーク上でファイバーチャネルフレームを送信するためのプロトコルです。通常、データセンターには専用の LAN および Storage Area Network (SAN) があり、各個別設定に分けられます。FCoE は、これらのネットワークを単一のネットワーク設定とコンバージドネットワーク設定に統合します。FCoE の利点 (ハードウェアおよび電力の低さなど) の利点は以下のとおりです。
16.1. RHEL でハードウェア FCoE HBA の使用
RHEL では、ハードウェアの Fibre Channel over Ethernet (FCoE) Host Bus Adapter (HBA) を使用できます。これは、以下のドライバーでサポートされています。
-
qedf -
bnx2fc -
fnic
このような HBA を使用する場合は、HBA の設定で FCoE を設定します。詳細は、アダプターのドキュメントを参照してください。
HBA を設定すると、Storage Area Network (SAN) からエクスポートした論理ユニット番号 (LUN) が、/dev/sd* デバイスとして RHEL で自動的に利用可能になります。ローカルストレージデバイスと同様に、これらのデバイスを使用できます。
16.2. FCoE デバイスの設定
この手順を完了すると、ストレージエリアネットワーク (SAN) からのエクスポート LUN は、/dev/sd* デバイスとして RHEL で利用可能になります。このようなデバイスは、ローカルストレージデバイスと同様に使用できます。
前提条件
- VLAN に対応するようにネットワークスイッチを設定している。
- SAN は VLAN を使用して、通常のイーサネットトラフィックからストレージトラフィックを分離します。
- サーバーの HBA が BIOS で設定されている。
- HBA がネットワークに接続されており、リンクが起動している。詳細は、HBA のドキュメントを参照してください。
手順
fcoe-utilsパッケージをインストールします。# dnf install fcoe-utils/etc/fcoe/cfg-ethxテンプレートファイルを/etc/fcoe/cfg-interface_nameにコピーします。たとえば、FCoE を使用するようにenp1s0インターフェイスを設定する場合は、以下のコマンドを実行します。# cp /etc/fcoe/cfg-ethx /etc/fcoe/cfg-enp1s0fcoeサービスを有効にして起動します。# systemctl enable --now fcoeインターフェイス
enp1s0で FCoE VLAN を検出し、検出された VLAN のネットワークデバイスを作成して、イニシエーターを起動します。# fipvlan -s -c enp1s0 Created VLAN device enp1s0.200 Starting FCoE on interface enp1s0.200 Fibre Channel Forwarders Discovered interface | VLAN | FCF MAC ------------------------------------------ enp1s0 | 200 | 00:53:00:a7:e7:1b必要に応じて、検出されたターゲット、LUN、および LUN に関連付けられたデバイスの詳細を表示します。
# fcoeadm -t Interface: enp1s0.200 Roles: FCP Target Node Name: 0x500a0980824acd15 Port Name: 0x500a0982824acd15 Target ID: 0 MaxFrameSize: 2048 bytes OS Device Name: rport-11:0-1 FC-ID (Port ID): 0xba00a0 State: Online LUN ID Device Name Capacity Block Size Description ------ ----------- ---------- ---------- --------------------- 0 sdb 28.38 GiB 512 NETAPP LUN (rev 820a) ...この例では、SAN からの LUN 0 が
/dev/sdbデバイスとしてホストに割り当てられていることを示しています。
検証
アクティブなすべての FCoE インターフェイスの情報を表示します。
# fcoeadm -i Description: BCM57840 NetXtreme II 10 Gigabit Ethernet Revision: 11 Manufacturer: Broadcom Inc. and subsidiaries Serial Number: 000AG703A9B7 Driver: bnx2x Unknown Number of Ports: 1 Symbolic Name: bnx2fc (QLogic BCM57840) v2.12.13 over enp1s0.200 OS Device Name: host11 Node Name: 0x2000000af70ae935 Port Name: 0x2001000af70ae935 Fabric Name: 0x20c8002a6aa7e701 Speed: 10 Gbit Supported Speed: 1 Gbit, 10 Gbit MaxFrameSize: 2048 bytes FC-ID (Port ID): 0xba02c0 State: Online
第17章 テープデバイスの管理
テープデバイスは、データの保存先で順次アクセスされる磁気テープです。データは、テープドライブを使用してこのテープデバイスに書き込まれます。テープデバイスにデータを保存するためにファイルシステムを作成する必要はありません。テープドライブは、SCSI、FC、USB、SATA などのさまざまなインターフェイスを備えたホストコンピューターに接続できます。
17.1. テープデバイスの種類
以下は、さまざまなタイプのテープデバイスのリストです。
-
/dev/st0は、巻き戻しありのテープデバイスです。 -
/dev/nst0は、巻き戻しなしのテープデバイスです。日次バックアップには、巻き戻しなしのデバイスを使用します。
テープデバイスを使用するメリットは複数あります。コスト効率が高く、安定しています。テープデバイスは、データの破損に対しても回復力があり、データの保持に適しています。
17.2. テープドライブ管理ツールのインストール
テープドライブ操作用の mt-st パッケージをインストールします。磁気テープドライブの操作を制御するには mt ユーティリティーを使用します。SCSI テープドライバーを制御するには st ユーティリティーを使用します。
手順
mt-stパッケージをインストールします。# dnf install mt-st
17.3. テープコマンド
以下は、一般的な mt コマンドです。
| コマンド | 説明 |
|---|---|
|
| テープデバイスの状態を表示します。 |
|
| テープ全体を消去します。 |
|
| テープデバイスを巻き戻します。 |
|
| テープヘッドを正引きレコードに切り替えます。ここでは、n はオプションのファイル数です。ファイル数を指定すると、テープヘッドは n 件のレコードをスキップします。 |
|
| テープヘッドを以前のレコードに切り替えます。 |
|
| テープヘッドをデータの最後に切り替えます。 |
17.4. 巻き戻しテープデバイスへの書き込み
巻き戻しテープデバイスは、操作のたびにテープを巻き戻します。データをバックアップするには、tar コマンドを使用できます。デフォルトでは、テープデバイスの ブロックサイズ は 10KB (bs=10k) です。export TAPE=/dev/st0 属性を使用して TAPE 環境変数を設定できます。代わりに -f デバイスオプションを使用してテープデバイスファイルを指定します。このオプションは、複数のテープデバイスを使用する場合に役立ちます。
前提条件
-
mt-stパッケージがインストールされている。詳細は、テープドライブ管理ツールのインストール を参照。 テープドライブが読み込まれている。
# mt -f /dev/st0 load
手順
テープヘッドを確認します。
# mt -f /dev/st0 status SCSI 2 tape drive: File number=-1, block number=-1, partition=0. Tape block size 0 bytes. Density code 0x0 (default). Soft error count since last status=0 General status bits on (50000): DR_OPEN IM_REP_ENここでは、以下のようになります。
-
現在の
ファイル番号は -1 です。 -
block numberはテープヘッドを定義します。デフォルトでは、-1 に設定されます。 -
block size0 は、テープデバイスのブロックサイズが固定されていないことを示します。 -
Soft error countは、mt status コマンドの実行後に発生したエラーの数を示します。 -
General status bitsは、テープデバイスの統計を表示します。 -
DR_OPENは、ドアが開き、テープデバイスが空であることを示します。IM_REP_ENは即時レポートモードです。
-
現在の
テープデバイスが空でない場合は、それを上書きします。
# tar -czf /dev/st0 _/source/directoryこのコマンドは、テープデバイスのデータを
/source/directoryの内容で上書きします。/source/directoryをテープデバイスにバックアップします。# tar -czf /dev/st0 _/source/directory tar: Removing leading `/' from member names /source/directory /source/directory/man_db.conf /source/directory/DIR_COLORS /source/directory/rsyslog.conf [...]テープデバイスのステータスを表示します。
# mt -f /dev/st0 status
検証
テープデバイスにあるすべてのファイルのリストを表示します。
# tar -tzf /dev/st0 /source/directory/ /source/directory/man_db.conf /source/directory/DIR_COLORS /source/directory/rsyslog.conf [...]
17.5. 巻き戻しなしのテープデバイスへの書き込み
特定のコマンドの実行を完了した後、巻き戻しなしのテープデバイスはテープをその状態のままにします。たとえば、巻き戻しなしのテープデバイスでは、バックアップの後にさらにデータを追加できます。また、これを使用して予期しない巻き戻しを回避することもできます。
前提条件
-
mt-stパッケージがインストールされている。詳細は、テープドライブ管理ツールのインストール を参照。 テープドライブが読み込まれている。
# mt -f /dev/nst0 load
手順
巻き戻しなしのテープデバイス
/dev/nst0のテープヘッドを確認します。# mt -f /dev/nst0 statusテープのヘッドまたはテープの最後にポインターを指定します。
# mt -f /dev/nst0 rewindテープデバイスにデータを追加するには、次のコマンドを実行します。
# mt -f /dev/nst0 eod # tar -czf /dev/nst0 /source/directory//source/directory/をテープデバイスにバックアップします。# tar -czf /dev/nst0 /source/directory/ tar: Removing leading `/' from member names /source/directory/ /source/directory/man_db.conf /source/directory/DIR_COLORS /source/directory/rsyslog.conf [...]テープデバイスのステータスを表示します。
# mt -f /dev/nst0 status
検証
テープデバイスにあるすべてのファイルのリストを表示します。
# tar -tzf /dev/nst0 /source/directory/ /source/directory/man_db.conf /source/directory/DIR_COLORS /source/directory/rsyslog.conf [...]
17.6. テープデバイスでのテープヘッドの切り替え
eod オプションを使用して、テープデバイス内のテープヘッドを切り替えることができます。
前提条件
-
mt-stパッケージがインストールされている。詳細は、テープドライブ管理ツールのインストール を参照。 - データはテープデバイスに書き込まれる。詳細は、Writing to rewinding tape devices または Writing to non-rewinding tape devices を参照。
手順
テープポインターの現在の位置を表示するには、次のコマンドを実行します。
# mt -f /dev/nst0 tellデータをテープデバイスに追加する際にテープヘッドを切り替えるには、次のコマンドを実行します。
# mt -f /dev/nst0 eod前のレコードに移動するには、以下を実行します。
# mt -f /dev/nst0 bsfm 1次のレコードに移動するには、以下を行います。
# mt -f /dev/nst0 fsf 1
17.7. テープデバイスからのデータの復元
tar コマンドを使用して、テープデバイスからデータを復元できます。
前提条件
-
mt-stパッケージがインストールされている。詳細は、テープドライブ管理ツールのインストール を参照。 - データはテープデバイスに書き込まれる。詳細は、Writing to rewinding tape devices または Writing to non-rewinding tape devices を参照。
手順
巻き戻しありのテープデバイス
/dev/st0の場合、以下を実行します。/source/directory/を復元します。# tar -xzf /dev/st0 /source/directory/
巻き戻しなしのテープデバイス
/dev/nst0の場合、以下を実行します。テープデバイスを巻き戻します。
# mt -f /dev/nst0 rewind/etcディレクトリーを復元します。# tar -xzf /dev/nst0 /source/directory/
17.8. テープデバイスのデータの消去
erase オプションを使用して、テープデバイスからデータを消去できます。
前提条件
-
mt-stパッケージがインストールされている。詳細は、テープドライブ管理ツールのインストール を参照。 - データはテープデバイスに書き込まれる。詳細は、Writing to rewinding tape devices または Writing to non-rewinding tape devices を参照。
手順
テープデバイスからデータを削除します。
# mt -f /dev/st0 eraseテープデバイスをアンロードします。
# mt -f /dev/st0 offline
第18章 RAID の管理
Redundant Array of Independent Disks (RAID) を使用して、複数のドライブにデータを保存できます。ドライブに障害が発生した場合に、データの損失を回避することができます。
18.1. RAID の概要
RAID では、HDD、SSD、または NVMe などの複数のデバイスをアレイに組み合わせて、1 つの大型で高価なドライブでは達成できないパフォーマンスまたは冗長性の目標を達成することができますこのデバイスのアレイは、1 つの論理ストレージユニットまたはドライブとしてコンピューターに表示されます。
RAID は、レベル 0、1、4、5、6、10、リニアなどのさまざまな設定に対応します。RAID は、ディスクストライピング (RAID レベル 0)、ディスクミラーリング (RAID レベル 1)、およびパリティーによるディスクストライピング (RAID レベル 4、5、および 6) などの技術を使用して、冗長性、低遅延、帯域の増加、ハードディスクのクラッシュからの回復能力の最大化を達成します。
RAID は、データを一貫して使用するチャンク (通常は 256KB または 512KB、他の値は受け入れ可能) に分割することで、アレイ内の各デバイスにデータを分散します。採用されている RAID レベルに従って、これらのチャンクを RAID アレイ内のハードドライブに書き込みます。データの読み取り中はプロセスが逆になり、アレイ内の複数のデバイスが実際には 1 つの大きなドライブであるかのように見えます。
RAID テクノロジーは、大量のデータを管理するユーザーにとって有益です。RAID を導入する主な理由は次のとおりです。
- 速度を高める
- 1 台の仮想ディスクを使用してストレージ容量を増やす
- ディスク障害によるデータ損失を最小限に抑える
- RAID レイアウトおよびレベルのオンライン変換
18.2. RAID のタイプ
RAID のタイプとして考えられるのは以下の通りです。
- ファームウェア RAID
- ファームウェア RAID (ATARAID とも呼ばれる) とは、ソフトウェア RAID の種類で、ファームウェアベースのメニューを使用して RAID セットを設定できます。このタイプの RAID で使用されるファームウェアは BIOS にもフックされるため、その RAID セットから起動できます。異なるベンダーは、異なるオンディスクメタデータ形式を使用して、RAID セットのメンバーをマークします。Intel Matrix RAID は、ファームウェア RAID システムの一例を示しています。
- ハードウェア RAID
ハードウェアベースのアレイは、RAID サブシステムをホストとは別に管理します。ホストに対して RAID アレイごとに複数のデバイスが表示される場合があります。
ハードウェア RAID デバイスは、システムの内部または外部になる場合があります。内部デバイスは、一般的には、RAID タスクをオペレーティングシステムに対して透過的に処理する専用のコントローラーカードで構成されています。外部デバイスは、一般的には SCSI、ファイバーチャネル、iSCSI、InfiniBand などの高速ネットワーク相互接続を介してシステムに接続し、システムへの論理ユニットなどのボリュームを提示します。
RAID コントローラーカードは、オペレーティングシステムへの SCSI コントローラーのように動作し、実際のドライブ通信をすべて処理します。ドライブを通常の SCSI コントローラーと同様に RAID コントローラーに接続し、RAID コントローラーの設定に追加できます。オペレーティングシステムはこの違いを認識できません。
- ソフトウェア RAID
ソフトウェア RAID は、カーネルブロックデバイスコード内にさまざまな RAID レベルを実装します。高価なディスクコントローラーカードやホットスワップシャーシが不要なため、可能な限り安価なソリューションを提供します。ホットスワップシャーシを使用すると、システムの電源を切らずにハードドライブを取り外すことができます。ソフトウェア RAID は、SATA、SCSI、NVMe などの Linux カーネルが対応しているブロックストレージでも機能します。現在高速 CPU では、ハイエンドのストレージデバイスを使用する場合以外は、ソフトウェア RAID は通常ハードウェア RAID の規模を上回します。
Linux カーネルにはマルチデバイス (MD) ドライバーが含まれているため、RAID ソリューションは完全にハードウェアに依存しません。ソフトウェアベースのアレイのパフォーマンスは、サーバーの CPU パフォーマンスと負荷によって異なります。
Linux ソフトウェア RAID スタックの主な機能は次のとおりです。
- マルチスレッド設計
- 再構築なしで Linux マシン間でのアレイの移植性
- アイドルシステムリソースを使用したバックグラウンドのアレイ再構築
- ホットスワップドライブのサポート
- CPU の自動検出は、ストリーミング SIMD (Single Instruction Multiple Data) サポートなどの特定の CPU 機能を利用するための自動 CPU 検出
- アレイ内のディスク上にある不良セクターの自動修正
- RAID データの整合性を定期的にチェックしアレイの健全性を確保
- 重要なイベントが発生すると、指定された電子メールアドレスに送信される電子メールアラートによるアレイのプロアクティブな監視
システムのクラッシュ後にアレイ全体を再同期する代わりに、ディスクのどの部分を再同期する必要があるかをカーネルが正確に把握できるようにすることで、再同期イベントの速度を大幅に向上させる書き込みが集中しているビットマップ
注記再同期は、既存の RAID 内のデバイス間でデータを同期して冗長性を実現するプロセスです。
- チェックポイントを再同期して、再同期中にコンピューターを再起動すると、起動時に再同期が中断したところから再開され、最初からやり直すことはありません。
- インストール後にアレイのパラメーターを変更する機能は、再形成と呼ばれます。たとえば、新しいデバイスを追加しても、4 つのディスクの RAID5 アレイを 5 つのディスク RAID5 アレイに増大させることができます。この拡張操作はライブで行うため、新しいアレイで再インストールする必要はありません。
- 再成形は、RAID アルゴリズム、RAID アレイタイプのサイズ (RAID4、RAID5、RAID6、RAID10 など) の変更に対応しています。
- テイクオーバーは、RAID0 から RAID6 などの RAID レベルの変換をサポートしています。
- クラスターのストレージソリューションである Cluster MD は、RAID1 ミラーリングの冗長性をクラスターに提供します。現在、RAID1 のみがサポートされています。
18.3. RAID レベルとリニアサポート
レベル 0、1、4、5、6、10、リニアなど、RAID 別の対応設定は以下のとおりです。
- レベル 0
ストライピングとも呼ばれる RAID レベル 0 は、パフォーマンス指向のストライピングデータマッピング技術です。これは、アレイに書き込まれるデータがストライプに分割され、アレイのメンバーディスク全体に書き込まれることを意味します。これにより低い固有コストで高い I/O パフォーマンスを実現できますが、冗長性は提供されません。
RAID レベル 0 実装は、アレイ内の最小デバイスのサイズまで、メンバーデバイス全体にだけデータをストライピングします。つまり、複数のデバイスのサイズが少し異なる場合、それぞれのデバイスは最小ドライブと同じサイズであるかのように処理されます。したがって、レベル 0 アレイの共通ストレージ容量は、すべてのディスクの合計容量です。メンバーディスクのサイズが異なる場合、RAID0 は使用可能なゾーンを使用して、それらのディスクのすべての領域を使用します。
- レベル 1
RAID レベル 1 (ミラーリング) は、アレイの各メンバーディスクに同一のデータを書き込み、ミラー化されたコピーを各ディスクに残すことによって冗長性を提供します。ミラーリングは、データの可用性の単純化と高レベルにより、いまでも人気があります。レベル 1 は 2 つ以上のディスクと連携して、非常に優れたデータ信頼性を提供し、読み取り集中型のアプリケーションに対してパフォーマンスが向上しますが、比較的コストが高くなります。
RAID レベル 1 は、アレイ内のすべてのディスクに同じ情報を書き込むためコストがかかります。これにより、データの信頼性が提供されますが、レベル 5 などのパリティーベースの RAID レベルよりもスペース効率が大幅に低下します。ただし、この領域の非効率性にはパフォーマンス上の利点があります。パリティーベースの RAID レベルは、パリティーを生成するためにかなり多くの CPU 電力を消費しますが、RAID レベル 1 は単に同じデータを、CPU オーバーヘッドが非常に少ない複数の RAID メンバーに複数回書き込むだけです。そのため、RAID レベル 1 は、ソフトウェア RAID が使用されているマシンや、マシンの CPU リソースが一貫して RAID アクティビティー以外の操作でアレイ化されます。
レベル 1 アレイのストレージ容量は、ハードウェア RAID 内でミラーリングされている最小サイズのハードディスクの容量と同じか、ソフトウェア RAID 内でミラーリングされている最小のパーティションと同じ容量になります。レベル 1 の冗長性は、すべての RAID タイプの中で最も高いレベルであり、アレイは 1 つのディスクのみで動作できます。
- レベル 4
レベル 4 は、1 つのディスクドライブでパリティー連結を使用して、データを保護します。パリティー情報は、アレイ内の残りのメンバーディスクのコンテンツに基づいて計算されます。この情報は、アレイ内のいずれかのディスクに障害が発生した場合にデータの再構築に使用できます。その後、再構築されたデータを使用して、交換前に失敗したディスクに I/O 要求に対応でき、交換後に失敗したディスクを接続します。
パリティー専用ディスクは、RAID アレイへのすべての書き込みトランザクションにおいて固有のボトルネックとなるため、ライトバックキャッシングなどの付随する技術なしにレベル 4 が使用されることはほとんどありません。または、システム管理者が意図的にこのボトルネックを考慮してソフトウェア RAID デバイスを設計している特定の状況下で使用されます。たとえば、アレイにデータが格納されると書き込みトランザクションがほとんどないようなアレイです。RAID レベル 4 にはほとんど使用されないため、Anaconda ではこのオプションとしては使用できません。ただし、実際には必要な場合は、ユーザーが手動で作成できます。
ハードウェア RAID レベル 4 のストレージ容量は、最小メンバーパーティションの容量にパーティションの数を掛けて 1 を引いた値に等しくなります。RAID レベル 4 アレイのパフォーマンスは常に非対称です。つまり、読み込みは書き込みを上回ります。これは、パリティーを生成するときに書き込み操作が余分な CPU リソースとメインメモリー帯域幅を消費し、実際のデータをディスクに書き込むときに余分なバス帯域幅も消費するためです。これは、データだけでなくパリティーも書き込むためです。読み取り操作は、アレイが劣化状態にない限り、データを読み取るだけでパリティーを読み取る必要はありません。その結果、読み取り操作では、通常の操作条件下で同じ量のデータ転送を行う場合でも、ドライブおよびコンピューターのバス全体に生成されるトラフィックが少なくなります。
- レベル 5
これは RAID の最も一般的なタイプです。RAID レベル 5 は、アレイのすべてのメンバーディスクドライブにパリティーを分散することにより、レベル 4 に固有の書き込みボトルネックを排除します。パリティー計算プロセス自体のみがパフォーマンスのボトルネックです。最近の CPU はパリティーを非常に高速に計算できます。しかし、RAID 5 アレイに多数のディスクを使用していて、すべてのデバイスの合計データ転送速度が十分に高い場合、パリティー計算がボトルネックになる可能性があります。
レベル 5 のパフォーマンスは非対称であり、読み取りは書き込みよりも大幅に優れています。RAID レベル 5 のストレージ容量は、レベル 4 と同じです。
- レベル 6
パフォーマンスではなくデータの冗長性と保存が最重要事項であるが、レベル 1 の領域の非効率性が許容できない場合は、これが RAID の一般的なレベルです。レベル 6 では、複雑なパリティースキームを使用して、アレイ内の 2 つのドライブから失われたドライブから復旧できます。複雑なパリティースキームにより、ソフトウェア RAID デバイスで CPU 幅が大幅に高くなり、書き込みトランザクションの際に増大度が高まります。したがって、レベル 6 はレベル 4 や 5 よりもパフォーマンスにおいて、非常に非対称です。
RAID レベル 6 アレイの合計容量は、RAID レベル 5 および 4 と同様に計算されますが、デバイス数から追加パリティーストレージ領域用に 2 つのデバイス (1 ではなく) を引きます。
- レベル 10
この RAID レベルでは、レベル 0 のパフォーマンスとレベル 1 の冗長性を組み合わせます。また、2 台以上のデバイスを使用するレベル 1 アレイの無駄なスペースをある程度削減することができます。レベル 10 では、たとえば、データごとに 2 つのコピーのみを格納するように設定された 3 ドライブアレイを作成することができます。これにより、全体用のアレイサイズを最小デバイスのみと同じサイズ (3 つのデバイス、レベル 1 アレイなど) ではなく、最小デバイスのサイズの 1.5 倍にすることができます。これにより、CPU プロセスの使用量が RAID レベル 6 のようにパリティーを計算するのを防ぎますが、これは領域効率が悪くなります。
RAID レベル 10 の作成は、インストール時には対応していません。インストール後に手動で作成できます。
- リニア RAID
リニア RAID は、より大きな仮想ドライブを作成するドライブのグループ化です。
リニア RAID では、あるメンバードライブからチャンクが順次割り当てられます。最初のドライブが完全に満杯になったときにのみ次のドライブに移動します。これにより、メンバードライブ間の I/O 操作が分割される可能性はないため、パフォーマンスの向上は見られません。リニア RAID は冗長性がなく、信頼性は低下します。メンバードライブが 1 台でも故障すると、アレイ全体が使用できなくなり、データが失われる可能性があります。容量はすべてのメンバーディスクの合計になります。
18.4. サポート対象の RAID 変換
RAID レベルを別のレベルに変換することが可能です。たとえば、RAID5 から RAID10 への変換はできますが、RAID10 から RAID5 への変換はできません。次の表は、サポートされている RAID 変換を示しています。
| RAID 変換レベル | 変換手順 | 注記 |
|---|---|---|
| RAID レベル 0 から RAID レベル 4 |
| MD アレイに少なくとも 3 つのディスクが必要なため、ディスクを追加する必要があります。 |
| RAID レベル 0 から RAID レベル 5 |
| MD アレイに少なくとも 3 つのディスクが必要なため、ディスクを追加する必要があります。 |
| RAID レベル 0 から RAID レベル 10 |
| MD アレイに 2 つのディスクを追加する必要があります。 |
| RAID レベル 1 から RAID レベル 0 |
| |
| RAID レベル 1 から RAID レベル 5 |
| |
| RAID レベル 4 から RAID レベル 0 |
| |
| RAID レベル 4 から RAID レベル 5 |
| |
| RAID レベル 5 から RAID レベル 0 |
| |
| RAID レベル 5 から RAID レベル 1 |
| |
| RAID レベル 5 から RAID レベル 4 |
| |
| RAID レベル 5 から RAID レベル 6 |
| |
| RAID レベル 5 から RAID レベル 10 |
| RAID レベル 5 から RAID レベル 10 への変換は、次の 2 つのステップで行います。
|
| RAID レベル 6 から RAID レベル 5 |
| |
| RAID レベル 10 から RAID レベル 0 |
|
RAID 5 から RAID0 および RAID4 への変換は、ALGORITHM_PARITY_N レイアウトでのみ可能です。
RAID レベルを変換した後、mdadm --detail /dev/md0 または cat /proc/mdstat コマンドを使用して変換を確認します。
18.5. RAID サブシステム
RAID は次のサブシステムで構成されます。
- ハードウェア RAID コントローラードライバー
- ハードウェア RAID コントローラーに固有の RAID サブシステムはありません。特別な RAID チップセットを使用するため、ハードウェア RAID コントローラには独自のドライバが付属しています。これらのドライバーを使用すると、システムは RAID セットを通常のディスクとして検出します。
mdraidmdraidサブシステムはソフトウェア RAID ソリューションとして設計されました。これは、Red Hat Enterprise Linux のソフトウェア RAID の推奨ソリューションでもあります。このサブシステムでは独自のメタデータ形式が使用され、通常はネイティブの MD メタデータと呼ばれます。mdraid は、外部メタデータとして知られる他のメタデータ形式にも対応しています。Red Hat Enterprise Linux 9 は
mdraidと外部メタデータを使用して、Intel Rapid Storage (ISW) または Intel Matrix Storage Manager (IMSM) セットと Storage Networking Industry Association (SNIA) Disk Drive Format (DDF) にアクセスします。mdraidサブシステムセットは、mdadmユーティリティーによって設定および制御されます。
18.6. インストール中のソフトウェア RAID の作成
Redundant Arrays of Independent Disks (RAID) デバイスは、パフォーマンスを向上させ、一部の設定ではより優れたフォールトトレランスを提供するように配置された複数のストレージデバイスから構築されます。RAID デバイスの作成は 1 つのステップで終わり、必要に応じてディスクを追加または削除できます。システムでは、1 つの物理ディスクに 1 つの RAID パーティションが作成できるため、インストールプログラムで使用できるディスク数により、利用できる RAID デバイスのレベルが決定します。たとえば、システムにディスクが 2 つある場合は、RAID 10 デバイスを作成することはできません。少なくともディスクが 3 つ必要になるためです。RHEL は、システムのストレージパフォーマンスと信頼性を最適化するために、インストールされたシステムにストレージを設定するための LVM および LVM シンプロビジョニングを使用したソフトウェア RAID 0、RAID 1、RAID 4、RAID 5、RAID 6、および RAID 10 タイプをサポートしています。
64 ビットの IBM Z では、ストレージサブシステムが RAID を透過的に使用します。ソフトウェア RAID を手動で設定する必要はありません。
前提条件
- RAID 設定オプションは、インストール用に複数のディスクを選択している場合にのみ表示される。作成する RAID タイプに応じて、少なくとも 2 つのディスクが必要です。
- マウントポイントを作成している。マウントポイントを設定して、RAID デバイスを設定します。
- インストール先 画面で ラジオボタンを選択している。
手順
- 手動パーティション設定 画面の左側のペインで、必要なパーティションを選択します。
- デバイス セクションの下にある をクリックします。マウントポイントの設定 ダイアログボックスが開きます。
- RAID デバイスに追加するディスクを選択して、 をクリックします。
- デバイスタイプ ドロップダウンメニューをクリックして、RAID を選択します。
- ファイルシステム のドロップダウンメニューをクリックして、目的のファイルシステムタイプを選択します。
- RAID レベル ドロップダウンメニューをクリックして、目的の RAID レベルを選択します。
- をクリックして、変更を保存します。
- をクリックして設定を適用し、インストールの概要 ウィンドウに戻ります。
18.7. インストール済みシステムでのソフトウェア RAID の作成
mdadm ユーティリティーを使用して、既存のシステムにソフトウェア Redundant Array of Independent Disks (RAID) を作成できます。
前提条件
-
mdadmパッケージがインストールされている。 - システム上に 2 つ以上のパーティションを作成している。詳細な手順は、parted を使用したパーティションの作成 を参照してください。
手順
/dev/sda1 と /dev/sdc1 などの 2 つのブロックデバイスの RAID を作成します。
# mdadm --create /dev/md0 --level=0 --raid-devices=2 /dev/sda1 /dev/sdc1 mdadm: Defaulting to version 1.2 metadata mdadm: array /dev/md0 started.level_value オプションは、RAID レベルを定義します。
オプション: RAID のステータスを確認します。
# mdadm --detail /dev/md0 /dev/md0: Version : 1.2 Creation Time : Thu Oct 13 15:17:39 2022 Raid Level : raid0 Array Size : 18649600 (17.79 GiB 19.10 GB) Raid Devices : 2 Total Devices : 2 Persistence : Superblock is persistent Update Time : Thu Oct 13 15:17:39 2022 State : clean Active Devices : 2 Working Devices : 2 Failed Devices : 0 Spare Devices : 0 [...]オプション: RAID 内の各デバイスに関する詳細情報を確認します。
# mdadm --examine /dev/sda1 /dev/sdc1 /dev/sda1: Magic : a92b4efc Version : 1.2 Feature Map : 0x1000 Array UUID : 77ddfb0a:41529b0e:f2c5cde1:1d72ce2c Name : 0 Creation Time : Thu Oct 13 15:17:39 2022 Raid Level : raid0 Raid Devices : 2 [...]RAID ドライブにファイルシステムを作成します。
# mkfs -t xfs /dev/md0xfs を、ドライブをフォーマットするために選択したファイルシステムに置き換えます。
RAID ドライブのマウントポイントを作成してマウントします。
# mkdir /mnt/raid1 # mount /dev/md0 /mnt/raid1/mnt/raid1 をマウントポイントに置き換えます。
システムの起動時に RHEL が
md0RAID デバイスを自動的にマウントするようにするには、デバイスのエントリを/etc/fstabファイルに追加します。/dev/md0 /mnt/raid1 xfs defaults 0 0
18.8. Web コンソールで RAID の作成
RHEL 9 Web コンソールで RAID を設定します。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
cockpit-storagedパッケージがシステムにインストールされている。 - 物理ディスクが接続されており、システムに認識されている。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- パネルで、Storage をクリックします。
- Storage テーブルで、メニューボタンをクリックし、Create MDRAID device を選択します。
- Create RAID Device フィールドに、新しい RAID の名前を入力します。
- RAID レベル ドロップダウンリストで、使用する RAID レベルを選択します。
Chunk Size ドロップダウンリストから、使用可能なオプションのリストからサイズを選択します。
Chunk Size の値は、データ書き込み用の各ブロックの大きさを指定します。たとえば、チャンクサイズが 512 KiB の場合、システムは最初の 512 KiB を最初のディスクに書き込み、次の 512 KiB を次のディスクに書き込み、その次の 512 KiB をその次のディスクに書き込みます。RAID に 3 つのディスクがある場合は、4 つ目の 512 KiB が最初のディスクに再度書き込まれます。
- RAID に使用するディスクを選択します。
- Create をクリックします。
検証
- ストレージ セクションに移動し、RAID デバイス ボックスに新しい RAID が表示されることを確認します。
18.9. Web コンソールで RAID のフォーマット
RHEL 9 Web コンソールでソフトウェア RAID デバイスをフォーマットおよびマウントできます。
ボリュームのサイズや、選択するオプションによって、フォーマットに数分かかることがあります。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
cockpit-storagedパッケージがインストールされている。 - 物理ディスクが接続されており、システムに認識されている。
- RAID が作成されている。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- パネルで、Storage をクリックします。
- Storage テーブルで、フォーマットする RAID デバイスのメニューボタン をクリックします。
- ドロップダウンメニューから を選択します。
- Format フィールドに名前を入力します。
- Mount Point フィールドにマウントパスを追加します。
- Type ドロップダウンリストから、ファイルシステムのタイプを選択します。
- オプション: ディスクに機密データが含まれており、それを上書きする場合は、Overwrite existing data with zeros オプションをオンにします。オンにしない場合、ディスクヘッダーだけが書き換えられます。
- Encryption ドロップダウンメニューで、暗号化の種類を選択します。ボリュームを暗号化しない場合は、No encryption を選択します。
- At boot ドロップダウンメニューで、ボリュームをマウントするタイミングを選択します。
Mount options セクションで以下を実行します。
- ボリュームを読み取り専用論理ボリュームとしてマウントする場合は、Mount read only チェックボックスをオンにします。
- デフォルトのマウントオプションを変更する場合は、Custom mount options チェックボックスをオンにして、マウントオプションを追加します。
RAID パーティションをフォーマットします。
- パーティションをフォーマットしてマウントする場合は、 ボタンをクリックします。
- パーティションのみをフォーマットする場合は、 ボタンをクリックします。
検証
- フォーマットが正常に完了すると、Storage ページの Storage テーブルでフォーマットされた論理ボリュームの詳細を確認できます。
18.10. Web コンソールを使用した RAID 上のパーティションテーブルの作成
RHEL 9 インターフェイスに作成した新しいソフトウェア RAID デバイスで、パーティションテーブルを有する RAID をフォーマットします。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
cockpit-storagedパッケージがインストールされている。 - 物理ディスクが接続されており、システムに認識されている。
- RAID が作成されている。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- パネルで、Storage をクリックします。
- Storage テーブルで、パーティションテーブルを作成する RAID デバイスをクリックします。
- MDRAID device セクションのメニューボタン をクリックします。
- ドロップダウンメニューから、 を選択します。
Initialize disk ダイアログボックスで、以下を選択します。
パーティション設定:
- すべてのシステムおよびデバイスとの互換性をパーティションに持たせる必要がある場合は、MBR を選択します。
- 最新のシステムとの互換性をパーティションに持たせる必要があり、2 TB を超えるハードディスクが必要な場合は、GPT を選択します。
- パーティション設定が必要ない場合は、No partitioning を選択します。
オーバーライト:
- ディスクに機密データが含まれており、それを上書きする場合は、Overwrite existing data with zeros オプションをオンにします。オンにしない場合、ディスクヘッダーだけが書き換えられます。
- をクリックします。
18.11. Web コンソールを使用した RAID 上のパーティションの作成
既存のパーティションテーブルにパーティションを作成します。パーティションを作成した後、さらにパーティションを作成できます。
前提条件
- RHEL 9 Web コンソールをインストールし、アクセスできる。詳細は、Web コンソールのインストール を参照してください。
-
cockpit-storagedパッケージがシステムにインストールされている。 - RAID 上にパーティションテーブルが作成されている。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- パネルで、Storage をクリックします。
- パーティションを作成する RAID デバイスをクリックします。
- RAID デバイスページで、GPT partitions セクションまでスクロールし、メニューボタン [⋮] をクリックします。
- をクリックし、Create partition フィールドにファイルシステムの名前を入力します。名前にスペースは使用しないでください。
- Mount Point フィールドにマウントパスを入力します。
- Type ドロップダウンリストで、ファイルシステムのタイプを選択します。
- Size スライダーで、パーティションのサイズを設定します。
- オプション: ディスクに機密データが含まれており、それを上書きする場合は、Overwrite existing data with zeros を選択します。オンにしない場合、ディスクヘッダーだけが書き換えられます。
- Encryption ドロップダウンメニューで、暗号化の種類を選択します。ボリュームを暗号化しない場合は、No encryption を選択します。
- At boot ドロップダウンメニューで、ボリュームをマウントするタイミングを選択します。
Mount options セクションで以下を実行します。
- ボリュームを読み取り専用論理ボリュームとしてマウントする場合は、Mount read only チェックボックスをオンにします。
- デフォルトのマウントオプションを変更する場合は、Custom mount options チェックボックスをオンにして、マウントオプションを追加します。
パーティションを作成します。
- パーティションを作成してマウントする場合は、 ボタンをクリックします。
パーティションのみを作成する場合は、 ボタンをクリックします。
ボリュームのサイズや、選択するオプションによって、フォーマットに数分かかることがあります。
検証
- フォーマットされた論理ボリュームの詳細は、メインストレージページの Storage テーブルで確認できます。
18.12. Web コンソールを使用した RAID 上のボリュームグループの作成
ソフトウェア RAID からボリュームグループを構築
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
cockpit-storagedパッケージがインストールされている。 - フォーマットされておらず、マウントされていない RAID デバイスがある。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- パネルで、Storage をクリックします。
- Storage テーブルで、メニューボタン [⋮] をクリックし、Create LVM2 volume group を選択します。
- Create LVM2 volume group フィールドに、新しいボリュームグループの名前を入力します。
Disks リストで、RAID デバイスを選択します。
リストに RAID が表示されない場合は、システムから RAID のマウントを解除します。RAID デバイスは RHEL 9 システムで使用されていない必要があります。
- をクリックします。
18.13. storage RHEL システムロールを使用した RAID ボリュームの設定
storage システムロールを使用すると、Red Hat Ansible Automation Platform と Ansible-Core を使用して RHEL に RAID ボリュームを設定できます。要件に合わせて RAID ボリュームを設定するためのパラメーターを使用して、Ansible Playbook を作成します。
特定の状況でデバイス名が変更する場合があります。たとえば、新しいディスクをシステムに追加するときなどです。したがって、データの損失を防ぐために、Playbook では永続的な命名属性を使用してください。永続的な命名属性の詳細は、永続的な命名属性 を参照してください。
前提条件
- コントロールノードと管理対象ノードの準備が完了している。
-
管理対象ノードへの接続に使用するアカウントに、そのノードに対する
sudo権限がある。
手順
次の内容を含む Playbook ファイル (例:
~/playbook.yml) を作成します。--- - name: Manage local storage hosts: managed-node-01.example.com tasks: - name: Create a RAID on sdd, sde, sdf, and sdg ansible.builtin.include_role: name: redhat.rhel_system_roles.storage vars: storage_safe_mode: false storage_volumes: - name: data type: raid disks: [sdd, sde, sdf, sdg] raid_level: raid0 raid_chunk_size: 32 KiB mount_point: /mnt/data state: presentPlaybook で使用されるすべての変数の詳細は、コントロールノードの
/usr/share/ansible/roles/rhel-system-roles.storage/README.mdファイルを参照してください。Playbook の構文を検証します。
$ ansible-playbook --syntax-check ~/playbook.ymlこのコマンドは構文を検証するだけであり、有効だが不適切な設定から保護するものではないことに注意してください。
Playbook を実行します。
$ ansible-playbook ~/playbook.yml
検証
アレイが正しく作成されたことを確認します。
# ansible managed-node-01.example.com -m command -a 'mdadm --detail /dev/md/data'
18.15. RAID を縮小
mdadm ユーティリティの --grow オプションを使用して RAID を縮小できます。
XFS ファイルシステムは縮小に対応していません。
前提条件
-
partedパッケージがインストールされている
手順
- ファイルシステムを縮小します。詳細は、ファイルシステムの管理 を参照してください。
RAID のサイズを 512 MB などに減らします。
# mdadm --grow --size=524228 /dev/md0--sizeパラメータを kB で記述します。- パーティションのサイズを、必要なサイズまで縮小します。
18.16. インストール後にルートディスクを RAID1 に変換する
Red Hat Enterprise Linux 9 をインストールした後、非 RAID ルートディスクを RAID1 ミラーに変換できます。
手順
- x86 アーキテクチャーでは、Red Hat ナレッジベースのソリューション Red Hat Enterprise Linux 9 のインストール後にシングルディスク EFI ブートをソフトウェア RAID に変換する方法 の手順を完了してください。
- PowerPC (PPC) アーキテクチャーでは、Red Hat Knowledgebase ソリューション Red Hat Enterprise Linux 9 のインストール後にルートディスクを RAID1 に変換するにはどうすればよいですか の手順を完了してください。
18.17. 高度な RAID デバイスの作成
場合によっては、インストールが完了する前に作成されたアレイにオペレーティングシステムをインストールすることを推奨します。通常、これは複雑な RAID デバイスに /boot または root ファイルシステムアレイを設定することを意味します。このような場合、Anaconda インストーラーでサポートされていないアレイオプションを使用する必要がある場合があります。これを回避するには、以下の手順を行います。
インストーラーの制限されたレスキューモードには man ページは含まれません。mdadm と md の両方の man ページには、カスタム RAID アレイを作成するための有用な情報が含まれており、回避策全体で必要になる場合があります。
手順
- インストールディスクを挿入します。
-
初回起動時に、Install または Upgrade ではなく、Rescue Mode を選択します。システムが
Rescue modeで完全に起動すると、コマンドラインターミナルが表示されます。 このターミナルから、次のコマンドを実行します。
-
partedコマンドを使用して、ターゲットハードドライブに RAID パーティションを作成します。 -
使用可能なすべての設定とオプションを使用して、これらのパーティションから
mdadmコマンドを使用して手動で RAID アレイを作成します。
-
- オプション: アレイを作成したら、アレイ上にもファイルシステムを作成します。
- コンピューターを再起動して、インストール または 更新 を選択して通常通りにインストールします。Anaconda インストーラーはシステム内のディスクを検索するため、既存の RAID デバイスが見つかります。
- システムのディスクの使い方を求められたら、カスタムレイアウト を選択して をクリックします。デバイス一覧に、既存の MD RAID デバイスが表示されます。
- RAID デバイスを選択し、 をクリックします。
- マウントポイントを設定し、必要に応じて、以前に作成していない場合は使用するファイルシステムのタイプを設定し、 をクリックします。Anaconda は、この既存の RAID デバイスにインストールし、Rescue モードで作成したときに選択したカスタムオプションを保持します。
18.18. RAID を監視するための電子メール通知の設定
mdadm ツールを使用して RAID を監視するように電子メールアラートを設定できます。MAILADDR 変数が必要な電子メールアドレスに設定されると、監視システムは追加された電子メールアドレスにアラートを送信します。
前提条件
-
mdadmパッケージがインストールされている。 - メールサービスが設定されている。
手順
RAID の詳細をスキャンして、アレイを監視するための
/etc/mdadm.conf設定ファイルを作成します。# mdadm --detail --scan >> /etc/mdadm.confARRAYおよびMAILADDRは必須の変数であることに注意してください。任意のテキストエディターで
/etc/mdadm.conf設定ファイルを開き、MAILADDR変数に通知用のメールアドレスを追加します。たとえば、次の行を追加します。MAILADDR example@example.comexample@example.com は、アレイの監視からアラートを受信するためのメールアドレスです。
-
/etc/mdadm.confファイルに変更を保存して、閉じます。
18.19. RAID での障害のあるディスクの置き換え
残りのディスクを使用して、故障したディスクからデータを再構築できます。データを正常に再構築するために最低限必要な残りのディスクの量は、RAID レベルとディスクの総数によって決まります。
この手順では、/dev/md0 RAID に 4 つのディスクが含まれています。/dev/sdd ディスクに障害が発生したため、/dev/sdf ディスクと交換する必要があります。
前提条件
- 交換用スペアディスク。
-
mdadmパッケージがインストールされている。
手順
障害が発生したディスクを確認します。
カーネルログを表示します。
# journalctl -k -f次のようなメッセージを検索します。
md/raid:md0: Disk failure on sdd, disabling device. md/raid:md0: Operation continuing on 3 devices.-
キーボードの Ctrl+C を押して、
journalctlプログラムを終了します。
障害の発生したディスクに faulty のマークを付けます。
# mdadm --manage /dev/md0 --fail /dev/sddオプション: 障害が発生したディスクが正しくマークされているかどうかを確認します。
# mdadm --detail /dev/md0出力の最後には、ディスク /dev/sdd のステータスが faulty の /dev/md0 RAID 内にあるディスクのリストが表示されます。
Number Major Minor RaidDevice State 0 8 16 0 active sync /dev/sdb 1 8 32 1 active sync /dev/sdc - 0 0 2 removed 3 8 64 3 active sync /dev/sde 2 8 48 - faulty /dev/sdd障害が発生したディスクを RAID から取り外します。
# mdadm --manage /dev/md0 --remove /dev/sdd警告RAID が別のディスク障害に耐えられない場合は、新しいディスクのステータスが active sync になるまでディスクを取り外さないでください。
watch cat /proc/mdstatコマンドを使用すると、進捗を監視できます。新しいディスクを RAID に追加します。
# mdadm --manage /dev/md0 --add /dev/sdf/dev/md0 RAID には新しいディスク /dev/sdf が含まれるようになり、
mdadmサービスは他のディスクからデータのコピーを自動的に開始します。
検証
アレイの詳細を確認します。
# mdadm --detail /dev/md0このコマンドの出力の最後に表示される /dev/md0 RAID 内のディスクのリストで、新しいディスクのステータスが spare rebuilding である場合、データはまだ他のディスクからコピーされています。
Number Major Minor RaidDevice State 0 8 16 0 active sync /dev/sdb 1 8 32 1 active sync /dev/sdc 4 8 80 2 spare rebuilding /dev/sdf 3 8 64 3 active sync /dev/sdeデータのコピーが完了すると、新しいディスクは active sync 状態になります。
18.20. RAID ディスクの修復
repair オプションを使用して、RAID アレイ内のディスクを修復できます。
前提条件
-
mdadmパッケージがインストールされている。
手順
障害が発生したディスクの動作についてアレイを確認します。
# echo check > /sys/block/md0/md/sync_actionこれによりアレイがチェックされ、
/sys/block/md0/md/sync_actionファイルに同期アクションが表示されます。-
/sys/block/md0/md/sync_actionファイルを任意のテキストエディターで開き、ディスク同期の失敗に関するメッセージがあるかどうかを確認します。 -
/sys/block/md0/md/mismatch_cntファイルを表示します。mismatch_cntパラメーターが0でない場合は、RAID ディスクを修復する必要があることを意味します。 アレイ内のディスクを修復します。
# echo repair > /sys/block/md0/md/sync_actionこれにより、アレイ内のディスクが修復され、結果が
/sys/block/md0/md/sync_actionファイルに書き込まれます。同期の進行状況を表示します。
# cat /sys/block/md0/md/sync_action repair # cat /proc/mdstat Personalities : [raid0] [raid6] [raid5] [raid4] [raid1] md0 : active raid1 sdg[1] dm-3[0] 511040 blocks super 1.2 [2/2] [UU] unused devices: <none>
第19章 LUKS を使用したブロックデバイスの暗号化
ディスク暗号化を使用すると、ブロックデバイス上のデータを暗号化して保護できます。デバイスの復号化されたコンテンツにアクセスするには、認証としてパスフレーズまたは鍵を入力します。これは、デバイスがシステムから物理的に取り外された場合でも、デバイスのコンテンツを保護するのに役立つため、モバイルコンピューターやリムーバブルメディアにとって重要です。LUKS 形式は、Red Hat Enterprise Linux におけるブロックデバイスの暗号化のデフォルト実装です。
19.1. LUKS ディスクの暗号化
Linux Unified Key Setup-on-disk-format (LUKS) は、暗号化されたデバイスの管理を簡素化するツールセットを提供します。LUKS を使用すると、ブロックデバイスを暗号化し、複数のユーザーキーでマスターキーを復号化できるようになります。パーティションの一括暗号化には、このマスターキーを使用します。
Red Hat Enterprise Linux は、LUKS を使用してブロックデバイスの暗号化を実行します。デフォルトではインストール時に、ブロックデバイスを暗号化するオプションが指定されていません。ディスクを暗号化するオプションを選択すると、コンピューターを起動するたびにパスフレーズの入力が求められます。このパスフレーズは、パーティションを復号化するバルク暗号鍵のロックを解除します。デフォルトのパーティションテーブルを変更する場合は、暗号化するパーティションを選択できます。この設定は、パーティションテーブル設定で行われます。
Ciphers
LUKS に使用されるデフォルトの暗号は aes-xts-plain64 です。LUKS のデフォルトの鍵サイズは 512 ビットです。Anaconda XTS モードを使用した LUKS のデフォルトの鍵サイズは 512 ビットです。使用可能な暗号は次のとおりです。
- 高度暗号化標準 (Advanced Encryption Standard, AES)
- Twofish
- Serpent
LUKS によって実行される操作
- LUKS は、ブロックデバイス全体を暗号化するため、脱着可能なストレージメディアやラップトップのディスクドライブといった、モバイルデバイスのコンテンツを保護するのに適しています。
- 暗号化されたブロックデバイスの基本的な内容は任意であり、スワップデバイスの暗号化に役立ちます。また、とりわけデータストレージ用にフォーマットしたブロックデバイスを使用する特定のデータベースに関しても有用です。
- LUKS は、既存のデバイスマッパーのカーネルサブシステムを使用します。
- LUKS はパスフレーズのセキュリティーを強化し、辞書攻撃から保護します。
- LUKS デバイスには複数のキースロットが含まれているため、バックアップキーやパスフレーズを追加できます。
LUKS は次のシナリオには推奨されません。
- LUKS などのディスク暗号化ソリューションは、システムの停止時にしかデータを保護しません。システムの電源がオンになり、LUKS がディスクを復号化すると、そのディスクのファイルは、そのファイルにアクセスできるすべてのユーザーが使用できます。
- 同じデバイスに対する個別のアクセスキーを複数のユーザーが持つ必要があるシナリオ。LUKS1 形式はキースロットを 8 個提供し、LUKS2 形式はキースロットを最大 32 個提供します。
- ファイルレベルの暗号化を必要とするアプリケーション。
19.2. RHEL の LUKS バージョン
Red Hat Enterprise Linux では、LUKS 暗号化のデフォルト形式は LUKS2 です。古い LUKS1 形式は引き続き完全にサポートされており、以前の Red Hat Enterprise Linux リリースと互換性のある形式で提供されます。LUKS2 再暗号化は、LUKS1 再暗号化と比較して、より堅牢で安全に使用できる形式と考えられています。
LUKS2 形式を使用すると、バイナリー構造を変更することなく、さまざまな部分を後に更新できます。LUKS2 は、内部的にメタデータに JSON テキスト形式を使用し、メタデータの冗長性を提供し、メタデータの破損を検出し、メタデータのコピーから自動的に修復します。
LUKS1 のみをサポートするシステムでは LUKS2 を使用しないでください。
Red Hat Enterprise Linux 9.2 以降では、両方の LUKS バージョンで cryptsetup reencrypt コマンドを使用してディスクを暗号化できます。
オンラインの再暗号化
LUKS2 形式は、デバイスが使用中の間に、暗号化したデバイスの再暗号化に対応します。たとえば、以下のタスクを実行するにあたり、デバイスでファイルシステムをアンマウントする必要はありません。
- ボリュームキーの変更
暗号化アルゴリズムの変更
暗号化されていないデバイスを暗号化する場合は、ファイルシステムのマウントを解除する必要があります。暗号化の短い初期化後にファイルシステムを再マウントできます。
LUKS1 形式は、オンライン再暗号化に対応していません。
変換
特定の状況では、LUKS1 を LUKS2 に変換できます。具体的には、以下のシナリオでは変換ができません。
-
LUKS1 デバイスが、Policy-Based Decryption (PBD) Clevis ソリューションにより使用されているとマークされている。
cryptsetupツールは、luksmetaメタデータが検出されると、そのデバイスを変換することを拒否します。 - デバイスがアクティブになっている。デバイスが非アクティブ状態でなければ、変換することはできません。
19.3. LUKS2 再暗号化中のデータ保護のオプション
LUKS2 では、再暗号化プロセスで、パフォーマンスやデータ保護の優先度を設定する複数のオプションを選択できます。resilience オプションには次のモードが用意されています。cryptsetup reencrypt --resilience resilience-mode /dev/<device_ID> コマンドを使用すると、これらのモードのいずれかを選択できます。<device_ID> は、デバイスの ID に置き換えてください。
checksumデフォルトのモード。データ保護とパフォーマンスのバランスを取ります。
このモードでは、再暗号化領域内のセクターのチェックサムが個別に保存されます。チェックサムは、LUKS2 によって再暗号化されたセクターについて、復旧プロセスで検出できます。このモードでは、ブロックデバイスセクターの書き込みがアトミックである必要があります。
journal- 最も安全なモードですが、最も遅いモードでもあります。このモードでは、再暗号化領域をバイナリー領域にジャーナル化するため、LUKS2 はデータを 2 回書き込みます。
none-
noneモードではパフォーマンスが優先され、データ保護は提供されません。SIGTERMシグナルやユーザーによる Ctrl+C キーの押下など、安全なプロセス終了からのみデータを保護します。予期しないシステム障害やアプリケーション障害が発生すると、データが破損する可能性があります。
LUKS2 の再暗号化プロセスが強制的に突然終了した場合、LUKS2 は以下のいずれかの方法で復旧を実行できます。
- 自動
次のいずれかのアクションを実行すると、次回の LUKS2 デバイスを開くアクション中に自動復旧アクションがトリガーされます。
-
cryptsetup openコマンドを実行する。 -
systemd-cryptsetupコマンドを使用してデバイスを接続する。
-
- 手動
-
LUKS2 デバイスで
cryptsetup repair /dev/<device_ID>コマンドを使用します。
19.4. LUKS2 を使用したブロックデバイスの既存データの暗号化
LUKS2 形式を使用して、まだ暗号化されていないデバイスの既存のデータを暗号化できます。新しい LUKS ヘッダーは、デバイスのヘッドに保存されます。
前提条件
- ブロックデバイスにファイルシステムがある。
データのバックアップを作成している。
警告ハードウェア、カーネル、または人的ミスにより、暗号化プロセス時にデータが失われる場合があります。データの暗号化を開始する前に、信頼性の高いバックアップを作成してください。
手順
暗号化するデバイスにあるファイルシステムのマウントをすべて解除します。次に例を示します。
# umount /dev/mapper/vg00-lv00LUKS ヘッダーを保存するための空き容量を確認します。シナリオに合わせて、次のいずれかのオプションを使用します。
論理ボリュームを暗号化する場合は、以下のように、ファイルシステムのサイズを変更せずに、論理ボリュームを拡張できます。以下に例を示します。
# lvextend -L+32M /dev/mapper/vg00-lv00-
partedなどのパーティション管理ツールを使用してパーティションを拡張します。 -
このデバイスのファイルシステムを縮小します。ext2、ext3、または ext4 のファイルシステムには
resize2fsユーティリティーを使用できます。XFS ファイルシステムは縮小できないことに注意してください。
暗号化を初期化します。
# cryptsetup reencrypt --encrypt --init-only --reduce-device-size 32M /dev/mapper/vg00-lv00 lv00_encrypted /dev/mapper/lv00_encrypted is now active and ready for online encryption.デバイスをマウントします。
# mount /dev/mapper/lv00_encrypted /mnt/lv00_encrypted永続的なマッピングのエントリーを
/etc/crypttabファイルに追加します。luksUUIDを見つけます。# cryptsetup luksUUID /dev/mapper/vg00-lv00 a52e2cc9-a5be-47b8-a95d-6bdf4f2d9325任意のテキストエディターで
/etc/crypttabを開き、このファイルにデバイスを追加します。$ vi /etc/crypttab lv00_encrypted UUID=a52e2cc9-a5be-47b8-a95d-6bdf4f2d9325 nonea52e2cc9-a5be-47b8-a95d-6bdf4f2d9325 は、デバイスの
luksUUIDに置き換えます。dracutで initramfs を更新します。$ dracut -f --regenerate-all
/etc/fstabファイルに永続的なマウントのエントリーを追加します。アクティブな LUKS ブロックデバイスのファイルシステムの UUID を見つけます。
$ blkid -p /dev/mapper/lv00_encrypted /dev/mapper/lv00-encrypted: UUID="37bc2492-d8fa-4969-9d9b-bb64d3685aa9" BLOCK_SIZE="4096" TYPE="xfs" USAGE="filesystem"任意のテキストエディターで
/etc/fstabを開き、このファイルにデバイスを追加します。次に例を示します。$ vi /etc/fstab UUID=37bc2492-d8fa-4969-9d9b-bb64d3685aa9 /home auto rw,user,auto 037bc2492-d8fa-4969-9d9b-bb64d3685aa9 は、ファイルシステムの UUID に置き換えます。
オンライン暗号化を再開します。
# cryptsetup reencrypt --resume-only /dev/mapper/vg00-lv00 Enter passphrase for /dev/mapper/vg00-lv00: Auto-detected active dm device 'lv00_encrypted' for data device /dev/mapper/vg00-lv00. Finished, time 00:31.130, 10272 MiB written, speed 330.0 MiB/s
検証
既存のデータが暗号化されているかどうかを確認します。
# cryptsetup luksDump /dev/mapper/vg00-lv00 LUKS header information Version: 2 Epoch: 4 Metadata area: 16384 [bytes] Keyslots area: 16744448 [bytes] UUID: a52e2cc9-a5be-47b8-a95d-6bdf4f2d9325 Label: (no label) Subsystem: (no subsystem) Flags: (no flags) Data segments: 0: crypt offset: 33554432 [bytes] length: (whole device) cipher: aes-xts-plain64 [...]暗号化された空のブロックデバイスのステータスを表示します。
# cryptsetup status lv00_encrypted /dev/mapper/lv00_encrypted is active and is in use. type: LUKS2 cipher: aes-xts-plain64 keysize: 512 bits key location: keyring device: /dev/mapper/vg00-lv00
19.5. 独立したヘッダーがある LUKS2 を使用してブロックデバイスの既存データの暗号化
LUKS ヘッダーを保存するための空き領域を作成せずに、ブロックデバイスの既存のデータを暗号化できます。ヘッダーは、追加のセキュリティー層としても使用できる、独立した場所に保存されます。この手順では、LUKS2 暗号化形式を使用します。
前提条件
- ブロックデバイスにファイルシステムがある。
データがバックアップ済みである。
警告ハードウェア、カーネル、または人的ミスにより、暗号化プロセス時にデータが失われる場合があります。データの暗号化を開始する前に、信頼性の高いバックアップを作成してください。
手順
以下のように、そのデバイスのファイルシステムをすべてアンマウントします。
# umount /dev/<nvme0n1p1><nvme0n1p1>は、アンマウントするパーティションに対応するデバイス識別子に置き換えます。暗号化を初期化します。
# cryptsetup reencrypt --encrypt --init-only --header </home/header> /dev/<nvme0n1p1> <nvme_encrypted> WARNING! ======== Header file does not exist, do you want to create it? Are you sure? (Type 'yes' in capital letters): YES Enter passphrase for </home/header>: Verify passphrase: /dev/mapper/<nvme_encrypted> is now active and ready for online encryption.以下のように置き換えます。
-
</home/header>には、独立した LUKS ヘッダーを含むファイルへのパスを指定します。後で暗号化したデバイスのロックを解除するために、独立した LUKS ヘッダーにアクセスできる必要があります。 -
<nvme_encrypted>は、暗号化後に作成されるデバイスマッパーの名前に置き換えます。
-
デバイスをマウントします。
# mount /dev/mapper/<nvme_encrypted> /mnt/<nvme_encrypted>永続的なマッピングのエントリーを
/etc/crypttabファイルに追加します。# <nvme_encrypted> /dev/disk/by-id/<nvme-partition-id> none header=</home/header><nvme-partition-id>は、NVMe パーティションの識別子に置き換えます。dracutを使用して initramfs を再生成します。# dracut -f --regenerate-all -v/etc/fstabファイルに永続的なマウントのエントリーを追加します。アクティブな LUKS ブロックデバイスのファイルシステムの UUID を見つけます。
$ blkid -p /dev/mapper/<nvme_encrypted> /dev/mapper/<nvme_encrypted>: UUID="37bc2492-d8fa-4969-9d9b-bb64d3685aa9" BLOCK_SIZE="4096" TYPE="xfs" USAGE="filesystem"テキストエディターで
/etc/fstabを開き、このファイルにデバイスを追加します。次に例を示します。UUID=<file_system_UUID> /home auto rw,user,auto 0<file_system_UUID>は、前の手順で見つかったファイルシステムの UUID に置き換えます。
オンライン暗号化を再開します。
# cryptsetup reencrypt --resume-only --header </home/header> /dev/<nvme0n1p1> Enter passphrase for /dev/<nvme0n1p1>: Auto-detected active dm device '<nvme_encrypted>' for data device /dev/<nvme0n1p1>. Finished, time 00m51s, 10 GiB written, speed 198.2 MiB/s
検証
独立したヘッダーがある LUKS2 を使用するブロックデバイスの既存のデータが暗号化されているかどうかを確認します。
# cryptsetup luksDump </home/header> LUKS header information Version: 2 Epoch: 88 Metadata area: 16384 [bytes] Keyslots area: 16744448 [bytes] UUID: c4f5d274-f4c0-41e3-ac36-22a917ab0386 Label: (no label) Subsystem: (no subsystem) Flags: (no flags) Data segments: 0: crypt offset: 0 [bytes] length: (whole device) cipher: aes-xts-plain64 sector: 512 [bytes] [...]暗号化された空のブロックデバイスのステータスを表示します。
# cryptsetup status <nvme_encrypted> /dev/mapper/<nvme_encrypted> is active and is in use. type: LUKS2 cipher: aes-xts-plain64 keysize: 512 bits key location: keyring device: /dev/<nvme0n1p1>
19.6. LUKS2 を使用した空のブロックデバイスの暗号化
LUKS2 形式を使用して、空のブロックデバイスを暗号化して、暗号化ストレージとして使用できます。
前提条件
-
空のブロックデバイス。
lsblkなどのコマンドを使用して、そのデバイス上に実際のデータ (ファイルシステムなど) がないかどうかを確認できます。
手順
暗号化した LUKS パーティションとしてパーティションを設定します。
# cryptsetup luksFormat /dev/nvme0n1p1 WARNING! ======== This will overwrite data on /dev/nvme0n1p1 irrevocably. Are you sure? (Type 'yes' in capital letters): YES Enter passphrase for /dev/nvme0n1p1: Verify passphrase:暗号化した LUKS パーティションを開きます。
# cryptsetup open /dev/nvme0n1p1 nvme0n1p1_encrypted Enter passphrase for /dev/nvme0n1p1:これにより、パーティションのロックが解除され、デバイスマッパーを使用してパーティションが新しいデバイスにマッピングされます。暗号化されたデータを上書きしないように、このコマンドは、デバイスが暗号化されたデバイスであり、
/dev/mapper/device_mapped_nameパスを使用して LUKS を通じてアドレス指定されることをカーネルに警告します。暗号化されたデータをパーティションに書き込むためのファイルシステムを作成します。このパーティションには、デバイスマップ名を介してアクセスする必要があります。
# mkfs -t ext4 /dev/mapper/nvme0n1p1_encryptedデバイスをマウントします。
# mount /dev/mapper/nvme0n1p1_encrypted mount-point
検証
空のブロックデバイスが暗号化されているかどうかを確認します。
# cryptsetup luksDump /dev/nvme0n1p1 LUKS header information Version: 2 Epoch: 3 Metadata area: 16384 [bytes] Keyslots area: 16744448 [bytes] UUID: 34ce4870-ffdf-467c-9a9e-345a53ed8a25 Label: (no label) Subsystem: (no subsystem) Flags: (no flags) Data segments: 0: crypt offset: 16777216 [bytes] length: (whole device) cipher: aes-xts-plain64 sector: 512 [bytes] [...]暗号化された空のブロックデバイスのステータスを表示します。
# cryptsetup status nvme0n1p1_encrypted /dev/mapper/nvme0n1p1_encrypted is active and is in use. type: LUKS2 cipher: aes-xts-plain64 keysize: 512 bits key location: keyring device: /dev/nvme0n1p1 sector size: 512 offset: 32768 sectors size: 20938752 sectors mode: read/write
19.7. Web コンソールでの LUKS パスフレーズの設定
システムの既存の論理ボリュームに暗号化を追加する場合は、ボリュームをフォーマットすることでしか実行できません。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
cockpit-storagedパッケージがシステムにインストールされている。 - 暗号化なしで、既存の論理ボリュームを利用できます。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- パネルで、Storage をクリックします。
- Storage テーブルで、暗号化するストレージデバイスのメニューボタン をクリックし、 をクリックします。
- Encryption field で、暗号化仕様 LUKS1 または LUKS2 を選択します。
- 新しいパスフレーズを設定し、確認します。
- オプション: さらなる暗号化オプションを変更します。
- フォーマット設定の最終処理
- Format をクリックします。
19.8. Web コンソールで LUKS パスフレーズの変更
Web コンソールで、暗号化されたディスクまたはパーティションで LUKS パスフレーズを変更します。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
cockpit-storagedパッケージがシステムにインストールされている。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- パネルで、Storage をクリックします。
- Storage テーブルで、暗号化されたデータを含むディスクを選択します。
- ディスクページで、Keys セクションまでスクロールし、編集ボタンをクリックします。
パスフレーズの変更 ダイアログウィンドウで、以下を行います。
- 現在のパスフレーズを入力します。
- 新しいパスフレーズを入力します。
- 新しいパスフレーズを確認します。
- Save をクリックします。
19.9. コマンドラインを使用した LUKS パスフレーズの変更
コマンドラインを使用して、暗号化されたディスクまたはパーティションの LUKS パスフレーズを変更します。cryptsetup ユーティリティーを使用すると、さまざまな設定オプションと機能を使用して暗号化プロセスを制御し、既存の自動化ワークフローにプロセスを統合できます。
前提条件
-
root特権、またはsudoを使用して管理コマンドを入力する権限がある。
手順
LUKS 暗号化デバイスの既存のパスフレーズを変更します。
# cryptsetup luksChangeKey /dev/<device_ID><device_ID>は、デバイス指定子 (例:sda) に置き換えます。複数のキースロットが設定されている場合は、使用するスロットを指定できます。
# cryptsetup luksChangeKey /dev/<device_ID> --key-slot <slot_number><slot_number>は、変更するキースロットの番号に置き換えます。現在のパスフレーズと新しいパスフレーズを入力します。
Enter passphrase to be changed: Enter new passphrase: Verify passphrase:新しいパスフレーズを検証します。
# cryptsetup --verbose open --test-passphrase /dev/<device_ID>
検証
新しいパスフレーズでデバイスのロックを解除できることを確認します。
Enter passphrase for /dev/<device_ID>: Key slot <slot_number> unlocked. Command successful.
19.10. storage RHEL システムロールを使用して LUKS2 暗号化ボリュームを作成する
storage ロールを使用し、Ansible Playbook を実行して、LUKS で暗号化されたボリュームを作成および設定できます。
前提条件
- コントロールノードと管理対象ノードの準備が完了している。
-
管理対象ノードへの接続に使用するアカウントに、そのノードに対する
sudo権限がある。
手順
機密性の高い変数を暗号化されたファイルに保存します。
vault を作成します。
$ ansible-vault create ~/vault.yml New Vault password: <vault_password> Confirm New Vault password: <vault_password>ansible-vault createコマンドでエディターが開いたら、機密データを<key>: <value>形式で入力します。luks_password: <password>- 変更を保存して、エディターを閉じます。Ansible は vault 内のデータを暗号化します。
次の内容を含む Playbook ファイル (例:
~/playbook.yml) を作成します。--- - name: Manage local storage hosts: managed-node-01.example.com vars_files: - ~/vault.yml tasks: - name: Create and configure a volume encrypted with LUKS ansible.builtin.include_role: name: redhat.rhel_system_roles.storage vars: storage_volumes: - name: barefs type: disk disks: - sdb fs_type: xfs fs_label: <label> mount_point: /mnt/data encryption: true encryption_password: "{{ luks_password }}"Playbook で使用されるすべての変数の詳細は、コントロールノードの
/usr/share/ansible/roles/rhel-system-roles.storage/README.mdファイルを参照してください。Playbook の構文を検証します。
$ ansible-playbook --ask-vault-pass --syntax-check ~/playbook.ymlこのコマンドは構文を検証するだけであり、有効だが不適切な設定から保護するものではないことに注意してください。
Playbook を実行します。
$ ansible-playbook --ask-vault-pass ~/playbook.yml
検証
LUKS 暗号化ボリュームの
luksUUID値を見つけます。# ansible managed-node-01.example.com -m command -a 'cryptsetup luksUUID /dev/sdb' 4e4e7970-1822-470e-b55a-e91efe5d0f5cボリュームの暗号化ステータスを表示します。
# ansible managed-node-01.example.com -m command -a 'cryptsetup status luks-4e4e7970-1822-470e-b55a-e91efe5d0f5c' /dev/mapper/luks-4e4e7970-1822-470e-b55a-e91efe5d0f5c is active and is in use. type: LUKS2 cipher: aes-xts-plain64 keysize: 512 bits key location: keyring device: /dev/sdb ...作成された LUKS 暗号化ボリュームを確認します。
# ansible managed-node-01.example.com -m command -a 'cryptsetup luksDump /dev/sdb' LUKS header information Version: 2 Epoch: 3 Metadata area: 16384 [bytes] Keyslots area: 16744448 [bytes] UUID: 4e4e7970-1822-470e-b55a-e91efe5d0f5c Label: (no label) Subsystem: (no subsystem) Flags: (no flags) Data segments: 0: crypt offset: 16777216 [bytes] length: (whole device) cipher: aes-xts-plain64 sector: 512 [bytes] ...
第20章 NVDIMM 永続メモリーストレージの使用
システムに接続した NVDIMM (Non-Volatile Dual In-line Memory Modules) デバイス上にあるさまざまなタイプのストレージの有効化および管理を行うことができます。
NVDIMM ストレージに Red Hat Enterprise Linux 9 をインストールする場合は、NVDIMM デバイスへのインストール を参照してください。
20.1. NVDIMM 永続メモリーテクノロジー
Non-Volatile Dual In-line Memory Modules (NVDIMM) 永続メモリーは、ストレージクラスメモリーまたは pmem とも呼ばれ、メモリーとストレージの組み合わせです。
NVDIMM は、ストレージの耐久性に加え、低アクセスレイテンシーと動的な DRAM の広帯域幅を採用しています。NVDIMM を使用するその他の利点は次のとおりです。
- NVDIMM ストレージはバイトアドレス指定可能です。つまり、CPU ロードおよびストア命令を使用してアクセスできます。従来のブロックベースのストレージへのアクセスに必要なシステムコール read() および write() の他に、NVDIMM はダイレクトロードとストアプログラミングモデルにも対応しています。
- NVDIMM のパフォーマンス特性は、アクセスレイテンシーが非常に低い DRAM と似ています。通常、数万から数十万ナノ秒です。
- NVDIMM に保存されたデータは、永続メモリーと同様に、電源がオフになっても保持されます。
- ダイレクトアクセス (DAX) テクノロジーを使用すると、システムページキャッシュを経由せずにメモリーマップストレージへのアプリケーションを直接実行できます。これにより、別の目的で DRAM を解放します。
NVDIMM は、次のようなユースケースでメリットがあります。
- データベース
- NVDIMM でのストレージアクセスレイテンシーの短縮により、データベースのパフォーマンスが向上します。
- 高速な再起動
高速な再起動は、ウォームキャッシュ効果とも呼ばれます。たとえば、ファイルサーバーは起動後、メモリー内にファイルコンテンツを持ちません。クライアントがデータを接続して読み書きすると、そのデータはページキャッシュにキャッシュされます。最終的に、キャッシュには、ほとんどのホットデータが含まれます。再起動後、システムは従来のストレージで再度プロセスを開始する必要があります。
NVDIMM を使用すると、アプリケーションが適切に設計されていれば、再起動後もウォームキャッシュを維持できます。この例には、ページキャッシュは含まれません。アプリケーションは、永続メモリーに直接データをキャッシュします。
- 高速書き込みキャッシュ
- 多くの場合、ファイルサーバーは、データが耐久性のあるメディアに保存されるまで、クライアントの書き込み要求を認識しません。NVDIMM を高速な書き込みキャッシュとして使用すると、ファイルサーバーが書き込み要求をすばやく認識できるようになり、遅延が少なくなります。
20.2. NVDIMM のインターリービングおよび地域
不揮発性デュアルインラインメモリーモジュール (NVDIMM) デバイスは、インターリーブ領域へのグループ化をサポートしています。
NVDIMM デバイスは、通常のダイナミック RAM (DRAM) と同じ方法でインターリーブセットにグループ化できます。インターリーブセットは、複数の DIMM にまたがる RAID 0 レベル (ストライプ) 設定と似ています。インターリーブセットは、リージョンとも呼ばれます。
インターリービングには、以下の利点があります。
- NVDIMM は、インターリーブセットに設定するとパフォーマンスが向上します。
- インターリービングは、複数の小さな NVDIMM デバイスを大きな論理デバイスに組み合わせます。
NVDIMM インターリーブセットは、システムの BIOS または UEFI ファームウェアで設定されます。Red Hat Enterprise Linux は、各インターリーブセットにリージョンデバイスを作成します。
20.3. NVDIMM 名前空間
不揮発性デュアルインラインメモリーモジュール (NVDIMM) 領域は、ラベル領域のサイズに応じて 1 つ以上の名前空間に分割できます。名前空間を使用すると、sector、fsdax、devdax、raw などの名前空間のアクセスモードに基づいて、さまざまな方法でデバイスにアクセスできます。詳細については、NVDIMM アクセスモード を参照してください。
一部の NVDIMM デバイスは、任意のリージョンでの複数の名前空間に対応していません。
- お使いの NVDIMM デバイスがラベルに対応している場合は、リージョンを名前空間に分割できます。
- NVDIMM デバイスがラベルに対応していない場合は、リージョンに名前空間を 1 つだけ追加できます。この場合、Red Hat Enterprise Linux は、リージョン全体に対応するデフォルトの名前空間を作成します。
20.4. NVDIMM アクセスモード
Non-Volatile Dual In-line Memory Modules (NVDIMM) 名前空間を設定して、次のいずれかのモードを使用できます。
sectorストレージを高速ブロックデバイスとして示します。このモードは、NVDIMM ストレージを使用するように変更されていないレガシーアプリケーションや、Device Mapper を含む完全な I/O スタックを使用するアプリケーションに役立ちます。
セクターデバイスは、システム上のその他のブロックデバイスと同じ方法で使用できます。そこではパーティションやファイルシステムを作成し、ソフトウェア RAID セットの一部として作成したり、dm-cacheのキャッシュデバイスとして使用できますこのモードのデバイスは、
/dev/pmemNsとして利用できます。名前空間を作成したら、リストされているblockdev値を確認します。devdaxまたはデバイスダイレクトアクセス (DAX)devdaxを使用すると、NVDIMM デバイスは、Storage Networking Industry Association (SNIA) Non-Volatile Memory (NVM) Programming Model 仕様で説明されているように、直接アクセスプログラミングをサポートします。このモードでは、I/O はカーネルのストレージスタックを回避します。したがって、デバイスマッパードライバーは使用できません。デバイス DAX は、DAX キャラクターデバイスノードを使用して NVDIMM ストレージへの raw アクセスを提供します。CPU キャッシュのフラッシュ命令とフェンシング命令を使用して、
devdaxデバイスのデータを作成できます。特定のデータベースおよび仮想マシンのハイパーバイザーは、このモードの利点を得られます。devdaxデバイスにファイルシステムを作成することはできません。このモードのデバイスは
/dev/daxN.Mとして利用できます。名前空間を作成したら、リストされたchardev値を確認します。fsdaxまたはファイルシステムダイレクトアクセス (DAX)fsdaxを使用すると、NVDIMM デバイスは、Storage Networking Industry Association (SNIA) Non-Volatile Memory (NVM) Programming Model 仕様で説明されているように、直接アクセスプログラミングをサポートします。このモードでは、I/O はカーネルのストレージスタックを回避するため、多くのデバイスマッパードライバーが使用できなくなります。ファイルシステム DAX デバイスにファイルシステムを作成できます。
このモードのデバイスは、
/dev/pmemNとして利用できます。名前空間を作成したら、リストされているblockdev値を確認します。rawDAX に対応していないメモリーディスクを示します。このモードでは、名前空間にいくつかの制限があるため、使用すべきではありません。
このモードのデバイスは、
/dev/pmemNとして利用できます。名前空間を作成したら、リストされているblockdev値を確認します。
20.5. ndctl のインストール
ndctl ユーティリティーをインストールして、不揮発性デュアルインラインメモリーモジュール (NVDIMM) デバイスを設定および監視できます。
手順
ndctlユーティリティーをインストールします。# dnf install ndctl
20.6. ブロックデバイスとして動作する NVDIMM 上のセクター名前空間の作成
非揮発性デュアルインラインメモリーモジュール (NVDIMM) デバイスをセクターモード (レガシーモードとも呼ばれます) で設定して、従来のブロックベースのストレージをサポートできます。
次のいずれかになります。
- 既存の名前空間をセクターモードに再設定
- 新規セクター名前空間を作成 (利用可能な領域がある場合)
前提条件
- NVDIMM デバイスがシステムに接続されている。
20.6.1. 既存の NVDIMM 名前空間のセクターモードへの再設定
Non-Volatile Dual In-line Memory Modules (NVDIMM) 名前空間をセクターモードに再設定して、高速ブロックデバイスとして使用できます。
名前空間を再設定すると、名前空間に以前に保存されたデータが削除されます。
前提条件
-
ndctlユーティリティーがインストールされている。詳細は、ndctl のインストール を参照してください。
手順
既存の名前空間を表示します。
# ndctl list --namespaces --idle [ { "dev":"namespace1.0", "mode":"raw", "size":34359738368, "state":"disabled", "numa_node":1 }, { "dev":"namespace0.0", "mode":"raw", "size":34359738368, "state":"disabled", "numa_node":0 } ]選択した名前空間をセクターモードに再設定します。
# ndctl create-namespace --force --reconfig=namespace-ID --mode=sector例20.1 セクターモードでの namespace1.0 の再設定
# ndctl create-namespace --force --reconfig=namespace1.0 --mode=sector { "dev":"namespace1.0", "mode":"sector", "size":"755.26 GiB (810.95 GB)", "uuid":"2509949d-1dc4-4ee0-925a-4542b28aa616", "sector_size":4096, "blockdev":"pmem1s" }再設定された名前空間は、
/devディレクトリーの下で/dev/pmem1sファイルとして利用できるようになりました。
検証
システム上の既存の名前空間が再設定されているかどうかを確認します。
# ndctl list --namespace namespace1.0 [ { "dev":"namespace1.0", "mode":"sector", "size":810954706944, "uuid":"2509949d-1dc4-4ee0-925a-4542b28aa616", "sector_size":4096, "blockdev":"pmem1s" } ]
20.6.2. セクターモードでの新たな NVDIMM 名前空間の作成
領域に利用可能なスペースがある場合、高速ブロックデバイスとして使用するために、不揮発性デュアルインラインメモリーモジュール (NVDIMM) 名前空間をセクターモードで作成できます。
前提条件
-
ndctlユーティリティーがインストールされている。詳細は、ndctl のインストール を参照してください。 NVDIMM デバイスは、リージョン内に複数の名前空間を作成するためのラベルをサポートしています。これは、次のコマンドを使用して確認できます。
# ndctl read-labels nmem0 >/dev/null read 1 nmemこれは、1 つの NVDIMM デバイスのラベルを読み取ったことを示しています。値が
0の場合、デバイスがラベルをサポートしていないことを意味します。
手順
利用可能な領域があるシステムの
pmemリージョンのリストを表示します。以下の例では、region1 リージョンと region0 リージョンの領域が利用できます。# ndctl list --regions [ { "dev":"region1", "size":2156073582592, "align":16777216, "available_size":2117418876928, "max_available_extent":2117418876928, "type":"pmem", "iset_id":-9102197055295954944, "badblock_count":1, "persistence_domain":"memory_controller" }, { "dev":"region0", "size":2156073582592, "align":16777216, "available_size":2143188680704, "max_available_extent":2143188680704, "type":"pmem", "iset_id":736272362787276936, "badblock_count":3, "persistence_domain":"memory_controller" } ]利用可能な領域のいずれかに、1 つ以上の名前空間を割り当てます。
# ndctl create-namespace --mode=sector --region=regionN --size=namespace-size例20.2 region0 に 36 GiB セクターの名前空間を作成する
# ndctl create-namespace --mode=sector --region=region0 --size=36G { "dev":"namespace0.1", "mode":"sector", "size":"35.96 GiB (38.62 GB)", "uuid":"ff5a0a16-3495-4ce8-b86b-f0e3bd9d1817", "sector_size":4096, "blockdev":"pmem0.1s" }新しい名前空間が
/dev/pmem0.1sとして利用できるようになりました。
検証
新しい名前空間がセクターモードで作成されているかどうかを確認します。
# ndctl list -RN -n namespace0.1 { "regions":[ { "dev":"region0", "size":2156073582592, "align":16777216, "available_size":2104533975040, "max_available_extent":2104533975040, "type":"pmem", "iset_id":736272362787276936, "badblock_count":3, "persistence_domain":"memory_controller", "namespaces":[ { "dev":"namespace0.1", "mode":"sector", "size":38615912448, "uuid":"ff5a0a16-3495-4ce8-b86b-f0e3bd9d1817", "sector_size":4096, "blockdev":"pmem0.1s" } ] } ] }
20.7. NVDIMM でのデバイス DAX 名前空間の作成
システムに接続されている NVDIMM デバイスをデバイス DAX モードで設定して、ダイレクトアクセス機能を備えたキャラクターストレージをサポートします。
次のオプションを検討してください。
- 既存の名前空間をデバイス DAX モードに再設定する。
- 利用可能な領域がある場合は、新しいデバイスの DAX 名前空間を作成する。
20.7.1. デバイスのダイレクトアクセスモードの NVDIMM
デバイスダイレクトアクセス (デバイス DAX である devdax) は、ファイルシステムの関与なしで、アプリケーションがストレージに直接アクセスできる手段を提供します。デバイス DAX の利点は、ndctl ユーティリティーの --align オプションを使用して設定できる、保証されたフォールトの粒度を提供することです。
Intel 64 アーキテクチャーおよび AMD64 アーキテクチャーでは、以下のフォールト粒度に対応しています。
- 4 KiB
- 2 MiB
- 1 GiB
デバイス DAX ノードは、以下のシステム呼び出しにのみ対応しています。
-
open() -
close() -
mmap()
ndctl list --human --capabilities コマンドを使用して、NVDIMM デバイスのサポートされているアライメントを表示できます。たとえば、region0 デバイスについて表示するには、ndctl list --human --capabilities -r region0 コマンドを使用します。
デバイスの DAX ユースケースは SNIA 不揮発性メモリープログラミングモデルに関連付けられているため、read () および write () システムコールはサポートされていません。
20.7.2. 既存の NVDIMM 名前空間をデバイス DAX モードに再設定
既存の不揮発性デュアルインラインメモリーモジュール (NVDIMM) 名前空間をデバイス DAX モードに再設定できます。
名前空間を再設定すると、名前空間に以前に保存されたデータが削除されます。
前提条件
-
ndctlユーティリティーがインストールされている。詳細は、ndctl のインストール を参照してください。
手順
システムにある名前空間のリストを表示します。
# ndctl list --namespaces --idle [ { "dev":"namespace1.0", "mode":"raw", "size":34359738368, "uuid":"ac951312-b312-4e76-9f15-6e00c8f2e6f4" "state":"disabled", "numa_node":1 }, { "dev":"namespace0.0", "mode":"raw", "size":38615912448, "uuid":"ff5a0a16-3495-4ce8-b86b-f0e3bd9d1817", "state":"disabled", "numa_node":0 } ]名前空間を再設定します。
# ndctl create-namespace --force --mode=devdax --reconfig=namespace-ID例20.3 名前空間をデバイス DAX として再設定
次のコマンドは、DAX に対応するデータストレージ用に
namespace0.1を再設定します。オペレーティングシステムが一度に 2 MiB ページでフォールトされるように、2 MiB フォールトの粒度に合わせて調整されます。# ndctl create-namespace --force --mode=devdax --align=2M --reconfig=namespace0.1 { "dev":"namespace0.1", "mode":"devdax", "map":"dev", "size":"35.44 GiB (38.05 GB)", "uuid":"426d6a52-df92-43d2-8cc7-046241d6d761", "daxregion":{ "id":0, "size":"35.44 GiB (38.05 GB)", "align":2097152, "devices":[ { "chardev":"dax0.1", "size":"35.44 GiB (38.05 GB)", "target_node":4, "mode":"devdax" } ] }, "align":2097152 }名前空間は、
/dev/dax0.1パスで利用できます。
検証
システム上の既存の名前空間が再設定されているかどうかを確認します。
# ndctl list --namespace namespace0.1 [ { "dev":"namespace0.1", "mode":"devdax", "map":"dev", "size":38048628736, "uuid":"426d6a52-df92-43d2-8cc7-046241d6d761", "chardev":"dax0.1", "align":2097152 } ]
20.7.3. デバイス DAX モードでの新しい NVDIMM 名前空間の作成
リージョンに空き容量がある場合は、Non-Volatile Dual In-line Memory Modules (NVDIMM) デバイスに新しいデバイス DAX 名前空間を作成できます。
前提条件
-
ndctlユーティリティーがインストールされている。詳細は、ndctl のインストール を参照してください。 NVDIMM デバイスは、リージョン内に複数の名前空間を作成するためのラベルをサポートしています。これは、次のコマンドを使用して確認できます。
# ndctl read-labels nmem0 >/dev/null read 1 nmemこれは、1 つの NVDIMM デバイスのラベルを読み取ったことを示しています。値が
0の場合、デバイスがラベルをサポートしていないことを意味します。
手順
利用可能な領域があるシステムの
pmemリージョンのリストを表示します。以下の例では、region1 リージョンと region0 リージョンの領域が利用できます。# ndctl list --regions [ { "dev":"region1", "size":2156073582592, "align":16777216, "available_size":2117418876928, "max_available_extent":2117418876928, "type":"pmem", "iset_id":-9102197055295954944, "badblock_count":1, "persistence_domain":"memory_controller" }, { "dev":"region0", "size":2156073582592, "align":16777216, "available_size":2143188680704, "max_available_extent":2143188680704, "type":"pmem", "iset_id":736272362787276936, "badblock_count":3, "persistence_domain":"memory_controller" } ]利用可能な領域のいずれかに、1 つ以上の名前空間を割り当てます。
# ndctl create-namespace --mode=devdax --region=regionN --size=namespace-size例20.4 リージョンへの名前空間の作成
次のコマンドは、region0 に 36-GiB のデバイス DAX 名前空間を作成します。オペレーティングシステムが一度に 2 MiB ページでフォールトされるように、2 MiB フォールトの粒度に合わせて調整されます。
# ndctl create-namespace --mode=devdax --region=region0 --align=2M --size=36G { "dev":"namespace0.2", "mode":"devdax", "map":"dev", "size":"35.44 GiB (38.05 GB)", "uuid":"89d13f41-be6c-425b-9ec7-1e2a239b5303", "daxregion":{ "id":0, "size":"35.44 GiB (38.05 GB)", "align":2097152, "devices":[ { "chardev":"dax0.2", "size":"35.44 GiB (38.05 GB)", "target_node":4, "mode":"devdax" } ] }, "align":2097152 }名前空間は
/dev/dax0.2として利用できるようになりました。
検証
新しい名前空間がデバイス DAX モードで作成されたかどうかを確認します。
# ndctl list -RN -n namespace0.2 { "regions":[ { "dev":"region0", "size":2156073582592, "align":16777216, "available_size":2065879269376, "max_available_extent":2065879269376, "type":"pmem", "iset_id":736272362787276936, "badblock_count":3, "persistence_domain":"memory_controller", "namespaces":[ { "dev":"namespace0.2", "mode":"devdax", "map":"dev", "size":38048628736, "uuid":"89d13f41-be6c-425b-9ec7-1e2a239b5303", "chardev":"dax0.2", "align":2097152 } ] } ] }
20.8. NVDIMM でのファイルシステム DAX 名前空間の作成
システムに接続されている NVDIMM デバイスをファイルシステム DAX モードで設定して、ダイレクトアクセス機能を備えたファイルシステムをサポートします。
次のオプションを検討してください。
- ファイルシステムの DAX モードに既存の名前空間を再設定する。
- 新しいファイルシステムの DAX 名前空間を作成する (利用可能な領域がある場合)。
20.8.1. ファイルシステムの直接アクセスモードの NVDIMM
NVDIMM デバイスがファイルシステムダイレクトアクセス (ファイルシステム DAX、fsdax) モードで設定されている場合、その上にファイルシステムを作成できます。このファイルシステムのファイルで mmap() 操作を実行するアプリケーションは、ストレージに直接アクセスします。これにより、NVDIMM 上のプログラミングモデルに直接アクセスできます。
次の新しい -o dax オプションが利用できるようになりました。必要に応じて、ファイル属性を介して直接アクセスの動作を制御できます。
-o dax=inodeこれは、ファイルシステムのマウント時に dax オプションを指定しない場合のデフォルトオプションです。このオプションを使用すると、ファイルに属性フラグを設定して、dax モードをアクティブにできるかどうかを制御できます。必要に応じて、個々のファイルにこのフラグを設定できます。
このフラグをディレクトリーに設定することもでき、そのディレクトリー内のすべてのファイルが同じフラグで作成されます。この属性フラグは、
xfs_io -c 'chattr +x'directory-name コマンドを使用して設定できます。-o dax=never-
このオプションを使用すると、dax フラグが
inodeモードに設定されていても、dax モードは有効になりません。これは、inode ごとの dax 属性フラグが無視され、このフラグが設定されたファイルは直接アクセスが有効にならないことを意味します。 -o dax=alwaysこのオプションは、古い
-o daxの動作と同等です。このオプションを使用すると、dax 属性フラグに関係なく、ファイルシステム上の任意のファイルに対して直接アクセスモードを有効にできます。警告今後のリリースでは、
-o daxがサポートされなくなる可能性があります。必要に応じて、代わりに-o dax=alwaysを使用できます。このモードでは、すべてのファイルが直接アクセスモードになる可能性があります。- ページごとのメタデータ割り当て
このモードでは、システム DRAM または NVDIMM デバイス自体でページごとのメタデータを割り当てる必要があります。このデータ構造のオーバーヘッドは、4 KiB ページごとに 64 バイトです。
- 小さいデバイスでは、問題なく DRAM に収まるのに十分なオーバーヘッド量があります。たとえば、16 GiB の名前区間のページ構造に必要なのは 256 MiB だけです。NVDIMM デバイスは通常小さくて高価であるため、ページトラッキングデータ構造を DRAM に格納することが推奨されます。
テラバイト以上のサイズの NVDIMM デバイスの場合は、ページトラッキングデータ構造の格納に必要なメモリーの量がシステム内の DRAM の量を超える可能性があります。NVDIMM の 1 TiB に対して、ページ構造だけで 16 GiB が必要です。したがって、このような場合には、NVDIMM 自体にデータ構造を保存することが推奨されます。
名前空間の設定時に
--mapオプションを使用して、ページごとのメタデータを保存する場所を設定できます。-
システム RAM に割り当てるには、
--map=memを使用します。 -
NVDIMM に割り当てるには、
--map=devを使用します。
20.8.2. ファイルシステム DAX モードへの既存の NVDIMM 名前空間の再設定
既存の不揮発性デュアルインラインメモリーモジュール (NVDIMM) 名前空間をファイルシステム DAX モードに再設定できます。
名前空間を再設定すると、名前空間に以前に保存されたデータが削除されます。
前提条件
-
ndctlユーティリティーがインストールされている。詳細は、ndctl のインストール を参照してください。
手順
システムにある名前空間のリストを表示します。
# ndctl list --namespaces --idle [ { "dev":"namespace1.0", "mode":"raw", "size":34359738368, "uuid":"ac951312-b312-4e76-9f15-6e00c8f2e6f4" "state":"disabled", "numa_node":1 }, { "dev":"namespace0.0", "mode":"raw", "size":38615912448, "uuid":"ff5a0a16-3495-4ce8-b86b-f0e3bd9d1817", "state":"disabled", "numa_node":0 } ]名前空間を再設定します。
# ndctl create-namespace --force --mode=fsdax --reconfig=namespace-ID例20.5 ファイルシステム DAX としての名前空間の再設定
DAX に対応するファイルシステムに
namespace0.0を使用するには、次のコマンドを使用します。# ndctl create-namespace --force --mode=fsdax --reconfig=namespace0.0 { "dev":"namespace0.0", "mode":"fsdax", "map":"dev", "size":"11.81 GiB (12.68 GB)", "uuid":"f8153ee3-c52d-4c6e-bc1d-197f5be38483", "sector_size":512, "align":2097152, "blockdev":"pmem0" }名前空間は
/dev/pmem0パスで利用できるようになりました。
検証
システム上の既存の名前空間が再設定されているかどうかを確認します。
# ndctl list --namespace namespace0.0 [ { "dev":"namespace0.0", "mode":"fsdax", "map":"dev", "size":12681478144, "uuid":"f8153ee3-c52d-4c6e-bc1d-197f5be38483", "sector_size":512, "align":2097152, "blockdev":"pmem0" } ]
20.8.3. ファイルシステム DAX モードで新しい NVDIMM 名前空間の作成
リージョンに空き容量がある場合は、Non-Volatile Dual In-line Memory Modules (NVDIMM) デバイスに新しいファイルシステム DAX 名前空間を作成できます。
前提条件
-
ndctlユーティリティーがインストールされている。詳細は、ndctl のインストール を参照してください。 NVDIMM デバイスは、リージョン内に複数の名前空間を作成するためのラベルをサポートしています。これは、次のコマンドを使用して確認できます。
# ndctl read-labels nmem0 >/dev/null read 1 nmemこれは、1 つの NVDIMM デバイスのラベルを読み取ったことを示しています。値が
0の場合、デバイスがラベルをサポートしていないことを意味します。
手順
利用可能な領域があるシステムの
pmemリージョンのリストを表示します。以下の例では、region1 リージョンと region0 リージョンの領域が利用できます。# ndctl list --regions [ { "dev":"region1", "size":2156073582592, "align":16777216, "available_size":2117418876928, "max_available_extent":2117418876928, "type":"pmem", "iset_id":-9102197055295954944, "badblock_count":1, "persistence_domain":"memory_controller" }, { "dev":"region0", "size":2156073582592, "align":16777216, "available_size":2143188680704, "max_available_extent":2143188680704, "type":"pmem", "iset_id":736272362787276936, "badblock_count":3, "persistence_domain":"memory_controller" } ]利用可能な領域のいずれかに、1 つ以上の名前空間を割り当てます。
# ndctl create-namespace --mode=fsdax --region=regionN --size=namespace-size例20.6 リージョンへの名前空間の作成
次のコマンドは、region0 で 36 GiB のファイルシステム DAX 名前空間を作成します。
# ndctl create-namespace --mode=fsdax --region=region0 --size=36G { "dev":"namespace0.3", "mode":"fsdax", "map":"dev", "size":"35.44 GiB (38.05 GB)", "uuid":"99e77865-42eb-4b82-9db6-c6bc9b3959c2", "sector_size":512, "align":2097152, "blockdev":"pmem0.3" }名前空間は
/dev/pmem0.3として利用できるようになりました。
検証
新しい名前空間がファイルシステム DAX モードで作成されたかどうかを確認します。
# ndctl list -RN -n namespace0.3 { "regions":[ { "dev":"region0", "size":2156073582592, "align":16777216, "available_size":2027224563712, "max_available_extent":2027224563712, "type":"pmem", "iset_id":736272362787276936, "badblock_count":3, "persistence_domain":"memory_controller", "namespaces":[ { "dev":"namespace0.3", "mode":"fsdax", "map":"dev", "size":38048628736, "uuid":"99e77865-42eb-4b82-9db6-c6bc9b3959c2", "sector_size":512, "align":2097152, "blockdev":"pmem0.3" } ] } ] }
20.8.4. ファイルシステム DAX デバイスでのファイルシステムの作成
ファイルシステム DAX デバイス上にファイルシステムを作成し、ファイルシステムをマウントできます。ファイルシステムを作成した後、アプリケーションは永続メモリーを使用して mount-point ディレクトリーにファイルを作成し、ファイルを開き、mmap 操作を使用して直接アクセスできるようにファイルをマップできます。
手順
オプション: ファイルシステム DAX デバイス上にパーティションを作成します。詳細は、parted を使用したパーティションの作成 を参照してください。
注記fsdaxデバイスにパーティションを作成する場合、パーティションはページの境界に調整する必要があります。Intel 64 アーキテクチャーおよび AMD64 アーキテクチャーでは、パーティションの開始と終了に最低 4 KiB のアライメントが必要です。2 MiB が優先されるアライメントです。partedツールは、デフォルトでは 1 MiB の境界にパーティションをそろえます。最初のパーティションには、パーティションの開始部分として 2 MiB を指定します。パーティションのサイズが 2 MiB の倍数である場合は、他のすべてのパーティションもそろえられます。パーティションまたは NVDIMM デバイスに XFS または ext4 ファイルシステムを作成します。
# mkfs.xfs -d su=2m,sw=1 fsdax-partition-or-device注記dax 対応ファイルと reflinked ファイルは、ファイルシステム上で共存できるようになりました。ただし、個々のファイルの場合、dax と reflink は相互に排他的です。
また、大規模ページのマッピングの可能性を高めるために、ストライプユニットとストライプ幅を設定してください。
ファイルシステムをマウントします。
# mount f_sdax-partition-or-device mount-point_直接アクセスモードを有効にするために dax オプションを使用してファイルシステムをマウントする必要はありません。マウント時に dax オプションを指定しない場合、ファイルシステムは
dax=inodeモードになります。直接アクセスモードをアクティブにする前に、ファイルに dax オプションを設定します。
20.9. S.M.A.R.T. を使用した NVDIMM 正常性 (ヘルス) の監視
一部の不揮発性デュアルインラインメモリーモジュール (NVDIMM) デバイスは、ヘルス情報を取得するためのセルフモニタリング、分析、レポートテクノロジー (S.M.A.R.T.) インターフェイスをサポートしています。
NVDIMM 正常性を定期的に監視して、データの損失を防ぎます。S.M.A.R.T. が NVDIMM デバイスのヘルスステータスに関する問題を報告した場合は、Detecting and replacing a broken NVDIMM device の説明に従って交換します。
前提条件
オプション: 一部のシステムでは、次のコマンドを使用して
acpi_ipmiドライバーをアップロードし、ヘルス情報を取得します。# modprobe acpi_ipmi
手順
ヘルス情報にアクセスします。
# ndctl list --dimms --health [ { "dev":"nmem1", "id":"8089-a2-1834-00001f13", "handle":17, "phys_id":32, "security":"disabled", "health":{ "health_state":"ok", "temperature_celsius":36.0, "controller_temperature_celsius":37.0, "spares_percentage":100, "alarm_temperature":false, "alarm_controller_temperature":false, "alarm_spares":false, "alarm_enabled_media_temperature":true, "temperature_threshold":82.0, "alarm_enabled_ctrl_temperature":true, "controller_temperature_threshold":98.0, "alarm_enabled_spares":true, "spares_threshold":50, "shutdown_state":"clean", "shutdown_count":4 } }, [...] ]
20.10. 破損した NVDIMM デバイスの検出と交換
不揮発性デュアルインラインメモリーモジュール (NVDIMM) に関連するエラーメッセージがシステムログまたは S.M.A.R.T. によって報告されている場合は、NVDIMM デバイスに障害が発生している可能性があります。この場合は、以下を行う必要があります。
- NVDIMM デバイスがエラーしていることを検出
- そこに格納されているデータをバックアップ
- デバイスを物理的に交換
手順
壊れたデバイスを検出します。
# ndctl list --dimms --regions --health { "dimms":[ { "dev":"nmem1", "id":"8089-a2-1834-00001f13", "handle":17, "phys_id":32, "security":"disabled", "health":{ "health_state":"ok", "temperature_celsius":35.0, [...] } [...] }破損した NVDIMM の
phys_id属性を見つけます。# ndctl list --dimms --human前述の例では、
nmem0が破損した NVDIMM になります。したがって、nmem0のphys_id属性を確認します。例20.7 NVDIMMs の phys_id 属性
以下の例では、
phys_idは0x10です。# ndctl list --dimms --human [ { "dev":"nmem1", "id":"XXXX-XX-XXXX-XXXXXXXX", "handle":"0x120", "phys_id":"0x1c" }, { "dev":"nmem0", "id":"XXXX-XX-XXXX-XXXXXXXX", "handle":"0x20", "phys_id":"0x10", "flag_failed_flush":true, "flag_smart_event":true } ]壊れた NVDIMM のメモリースロットを見つけます。
# dmidecode出力において、Handle 識別子が、破損した NVDIMM の
phys_id属性と一致するエントリーを確認します。Locator フィールドは、破損した NVDIMM が使用するメモリースロットの一覧を表示します。例20.8 NVDIMM メモリースロットリスティング
以下の例では、
nmem0デバイスが0x0010の識別子に一致し、DIMM-XXX-YYYYメモリースロットを使用します。# dmidecode ... Handle 0x0010, DMI type 17, 40 bytes Memory Device Array Handle: 0x0004 Error Information Handle: Not Provided Total Width: 72 bits Data Width: 64 bits Size: 125 GB Form Factor: DIMM Set: 1 Locator: DIMM-XXX-YYYY Bank Locator: Bank0 Type: Other Type Detail: Non-Volatile Registered (Buffered) ...NVDIMM 上の名前空間にある全データのバックアップを作成します。NVDIMM を交換する前にデータのバックアップを作成しないと、システムから NVDIMM を削除したときにデータが失われます。
警告時折、NVDIMM が完全に破損すると、バックアップが失敗することがあります。
これを防ぐには、Monitoring NVDIMM health using S.M.A.R.T. で説明されているように、S.M.A.R.T. を使用して NVDIMM デバイスを定期的に監視し、故障した NVDIMM を破損する前に交換します。
NVDIMM の名前空間を一覧表示します。
# ndctl list --namespaces --dimm=DIMM-ID-number例20.9 NVDIMM 名前空間のリスト表示
以下の例では、
nmem0デバイスには、バックアップが必要な名前空間のnamespace0.0とnamespace0.2が含まれます。# ndctl list --namespaces --dimm=0 [ { "dev":"namespace0.2", "mode":"sector", "size":67042312192, "uuid":"XXXXXXXX-XXXX-XXXX-XXXX-XXXXXXXXXXXX", "raw_uuid":"XXXXXXXX-XXXX-XXXX-XXXX-XXXXXXXXXXXX", "sector_size":4096, "blockdev":"pmem0.2s", "numa_node":0 }, { "dev":"namespace0.0", "mode":"sector", "size":67042312192, "uuid":"XXXXXXXX-XXXX-XXXX-XXXX-XXXXXXXXXXXX", "raw_uuid":"XXXXXXXX-XXXX-XXXX-XXXX-XXXXXXXXXXXX", "sector_size":4096, "blockdev":"pmem0s", "numa_node":0 } ]- 破損した NVDIMM を物理的に交換します。
第21章 未使用ブロックの破棄
破棄操作に対応するブロックデバイスで破棄操作を実行するか、そのスケジュールを設定できます。ブロック破棄操作では、マウントされたファイルシステムによって使用されなくなったファイルシステムブロックを、基盤となるストレージに伝達します。ブロック破棄操作により、SSD はガベージコレクションルーチンを最適化でき、シンプロビジョニングされたストレージに未使用の物理ブロックを再利用するように通知できます。
要件
ファイルシステムの基礎となるブロックデバイスは、物理的な破棄操作に対応している必要があります。
/sys/block/<device>/queue/discard_max_bytesファイルの値がゼロではない場合は、物理的な破棄操作はサポートされます。
21.1. ブロック破棄操作のタイプ
以下のような、さまざまな方法で破棄操作を実行できます。
- バッチ破棄
- これは、ユーザーによって明示的にトリガーされ、選択したファイルシステム内の未使用のブロックをすべて破棄します。
- オンライン破棄
-
これは、マウント時に指定され、ユーザーの介入なしにリアルタイムでトリガーされます。オンライン破棄操作は、
usedからfree状態に移行中のブロックのみを破棄します。 - 定期的な破棄
-
systemdサービスが定期的に実行するバッチ操作です。
すべてのタイプは、XFS ファイルシステムおよび ext4 ファイルシステムでサポートされます。
推奨事項
Red Hat は、バッチ破棄または周期破棄を使用することを推奨します。
以下の場合にのみ、オンライン破棄を使用してください。
- システムのワークロードでバッチ破棄が実行できない場合
- パフォーマンス維持にオンライン破棄操作が必要な場合
21.2. バッチブロック破棄の実行
バッチブロック破棄操作を実行して、マウントされたファイルシステムの未使用ブロックを破棄することができます。
前提条件
- ファイルシステムがマウントされている。
- ファイルシステムの基礎となるブロックデバイスが物理的な破棄操作に対応している。
手順
fstrimユーティリティーを使用します。選択したファイルシステムでのみ破棄を実行するには、次のコマンドを使用します。
# fstrim mount-pointマウントされているすべてのファイルシステムで破棄を実行するには、次のコマンドを使用します。
# fstrim --all
fstrim コマンドを以下のいずれかで実行している場合は、
- 破棄操作に対応していないデバイス
- 複数のデバイスから構成され、そのデバイスの 1 つが破棄操作に対応していない論理デバイス (LVM または MD)
次のメッセージが表示されます。
# fstrim /mnt/non_discard
fstrim: /mnt/non_discard: the discard operation is not supported21.3. オンラインブロック破棄の有効化
オンラインブロック破棄操作を実行して、サポートしているすべてのファイルシステムで未使用のブロックを自動的に破棄できます。
手順
マウント時のオンライン破棄を有効にします。
ファイルシステムを手動でマウントするには、
-o discardマウントオプションを追加します。# mount -o discard device mount-point-
ファイルシステムを永続的にマウントするには、
/etc/fstabファイルのマウントエントリーにdiscardオプションを追加します。
21.4. storage RHEL システムロールを使用してオンラインブロック破棄を有効にする
オンラインブロック破棄オプションを使用すると、XFS ファイルシステムをマウントし、未使用のブロックを自動的に破棄できます。
前提条件
- コントロールノードと管理対象ノードの準備が完了している。
-
管理対象ノードへの接続に使用するアカウントに、そのノードに対する
sudo権限がある。
手順
次の内容を含む Playbook ファイル (例:
~/playbook.yml) を作成します。--- - name: Manage local storage hosts: managed-node-01.example.com tasks: - name: Enable online block discard ansible.builtin.include_role: name: redhat.rhel_system_roles.storage vars: storage_volumes: - name: barefs type: disk disks: - sdb fs_type: xfs mount_point: /mnt/data mount_options: discardPlaybook で使用されるすべての変数の詳細は、コントロールノードの
/usr/share/ansible/roles/rhel-system-roles.storage/README.mdファイルを参照してください。Playbook の構文を検証します。
$ ansible-playbook --syntax-check ~/playbook.ymlこのコマンドは構文を検証するだけであり、有効だが不適切な設定から保護するものではないことに注意してください。
Playbook を実行します。
$ ansible-playbook ~/playbook.yml
検証
オンラインブロック破棄オプションが有効になっていることを確認します。
# ansible managed-node-01.example.com -m command -a 'findmnt /mnt/data'
21.5. 定期的なブロック破棄の有効化
systemd タイマーを有効にして、サポートしているすべてのファイルシステムで未使用ブロックを定期的に破棄できます。
手順
systemdタイマーを有効にして起動します。# systemctl enable --now fstrim.timer Created symlink /etc/systemd/system/timers.target.wants/fstrim.timer → /usr/lib/systemd/system/fstrim.timer.
検証
タイマーのステータスを確認します。
# systemctl status fstrim.timer fstrim.timer - Discard unused blocks once a week Loaded: loaded (/usr/lib/systemd/system/fstrim.timer; enabled; vendor preset: disabled) Active: active (waiting) since Wed 2023-05-17 13:24:41 CEST; 3min 15s ago Trigger: Mon 2023-05-22 01:20:46 CEST; 4 days left Docs: man:fstrim May 17 13:24:41 localhost.localdomain systemd[1]: Started Discard unused blocks once a week.
第22章 ストレージデバイスの削除
実行中のシステムからストレージデバイスを安全に削除することで、システムメモリーのオーバーロードやデータ損失を防ぐことができます。次のシステムではストレージデバイスを削除しないでください。
- 空きメモリーが合計メモリーの 5 % 未満 (サンプル 100 件の内 10 件以上)。
-
スワップが有効になっている (
vmstatコマンドの出力でsiとsoのコラムが 0 以外の値)。
前提条件
I/O フラッシュ中にシステムメモリーの負荷が増加するため、ストレージデバイスを削除する前に、システムメモリーが十分にあることを確認する。システムの現在のメモリー負荷と空きメモリーを表示するには、次のコマンドを使用します。
# vmstat 1 100 # free
22.1. ストレージデバイスの安全な削除
稼働中のシステムからストレージデバイスを安全に取り外すには、上から下へのアプローチが必要です。アプリケーションやファイルシステムなどの最上位層から始め、物理デバイスなどの最下位層に向かって作業を進めます。
ストレージデバイスは複数の方法で使用でき、物理デバイスの上層に別の仮想設定を指定できます。例えば、デバイスの複数のインスタンスをマルチパスデバイスにグループ化したり、RAID の一部にしたり、LVM グループの一部にしたりすることが可能です。さらに、デバイスにはファイルシステムを介してアクセスすることも、いわゆる生デバイスのように直接アクセスすることもできます。
上から下へのアプローチを用いながら、次のことを確認する必要があります。
- 削除したいデバイスが使用中でないこと
- デバイスへの保留中の I/O がすべてフラッシュされる
- オペレーティングシステムがストレージデバイスを参照していない
22.2. ブロックデバイスと関連メタデータの削除
実行中のシステムからブロックデバイスを安全に削除するには、システムメモリーのオーバーロードとデータ損失を防ぐために、最初にブロックデバイスからメタデータを削除する必要があります。ファイルシステムから始めて、スタック内の各レイヤーに対処し、ディスクに進みます。これらのアクションにより、システムが不整合な状態になるのを防ぎます。
削除するデバイスのタイプに応じて異なる特定のコマンドを使用します。
-
lvremove、vgremove、およびpvremoveは LVM に固有です。 -
ソフトウェア RAID の場合、
mdadmを実行してアレイを削除します。詳細は、RAID の管理 を参照してください。 - LUKS を使用して暗号化されたブロックデバイスの場合、特定の追加手順があります。次の手順は、LUKS を使用して暗号化されたブロックデバイスでは機能しません。詳細は、LUKS を使用したブロックデバイスの暗号化 を参照してください。
SCSI バスを再びスキャンしたり、ここで説明されている手順に従わずにオペレーティングシステムを変更する別のアクションを実行すると、I/O タイムアウトが原因で遅延が発生したり、デバイスやデータが予期せず削除されたりする可能性があります。
前提条件
- ファイルシステム、論理ボリューム、およびボリュームグループを含む既存のブロックデバイススタックがある。
- 削除するデバイスを他のアプリケーションやサービスが使用していないことを確認した。
- 削除するデバイスからデータをバックアップした。
オプション: マルチパスデバイスを削除する必要があり、そのパスデバイスにアクセスできない場合は、次のコマンドを実行してマルチパスデバイスのキューイングを無効にしておく。
# multipathd disablequeueing map multipath-device無効にすることで、デバイスの I/O が失敗し、デバイスを使用しているアプリケーションがシャットダウンできるようになります。
メタデータを含むデバイスを一度に 1 レイヤーずつ削除することで、ディスクに古い署名が残らないようにします。
手順
ファイルシステムをアンマウントします。
# umount /mnt/mount-pointファイルシステムを削除します。
# wipefs -a /dev/vg0/myvol/etc/fstabファイルにエントリーを追加して、ファイルシステムとマウントポイントの間の永続的な関連付けを作成した場合は、この時点で/etc/fstabを編集してそのエントリーを削除します。削除するデバイスのタイプに応じて、次の手順に進みます。
ファイルシステムを含む論理ボリューム (LV) を削除します。
# lvremove vg0/myvolボリュームグループ (VG) に他の論理ボリュームが残っていない場合は、デバイスを含む VG を安全に削除できます。
# vgremove vg0物理ボリューム (PV) メタデータを PV デバイスから削除します。
# pvremove /dev/sdc1# wipefs -a /dev/sdc1PV が含まれていたパーティションを削除します。
# parted /dev/sdc rm 1デバイスを完全に消去する場合は、パーティションテーブルを削除します。
# wipefs -a /dev/sdcデバイスを物理的に取り外す場合にのみ、次の手順を実行します。
マルチパスデバイスを削除する場合は,次のコマンドを実行します。
デバイスへの全パスを表示します。
# multipath -lこのコマンドの出力は、後のステップで必要になります。
I/O をフラッシュして、マルチパスデバイスを削除します。
# multipath -f multipath-device
デバイスがマルチパスデバイスとして設定されていない場合や、デバイスがマルチパスデバイスとして設定されていて、過去に I/O を個別のパスに渡している場合は、未処理の I/O を、使用されている全デバイスパスにフラッシュします。
# blockdev --flushbufs deviceこの操作は、
umountコマンドまたはvgreduceコマンドで I/O がフラッシュされないデバイスに直接アクセスする場合に重要になります。SCSI デバイスを取り外す場合は、以下のコマンドを実行します。
-
システム上のアプリケーション、スクリプト、またはユーティリティーで、
/dev/sd、/dev/disk/by-path、またはmajor:minor番号など、デバイスのパスベースの名前への参照をすべて削除します。参照を削除することで、今後追加される別のデバイスが現在のデバイスと混同されないようにします。 SCSI サブシステムからデバイスへの各パスを削除します。
# echo 1 > /sys/block/device-name/device/deleteデバイスが以前にマルチパスデバイスとして使用されていた場合、
device-nameは、multipath -lコマンドの出力からの内容に置き換えます。
-
システム上のアプリケーション、スクリプト、またはユーティリティーで、
- 稼働中のシステムから物理デバイスを削除します。このデバイスを削除しても、他のデバイスへの I/O は停止しないことに注意してください。
検証
削除したデバイスが
lsblkコマンドの出力に表示されないことを確認します。出力例を以下に示します。# lsblk NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT sda 8:0 0 5G 0 disk sr0 11:0 1 1024M 0 rom vda 252:0 0 10G 0 disk |-vda1 252:1 0 1M 0 part |-vda2 252:2 0 100M 0 part /boot/efi `-vda3 252:3 0 9.9G 0 part /
第23章 Stratis ファイルシステムの設定
Stratis は、Red Hat Enterprise Linux 用のローカルストレージ管理ソリューションです。これは、シンプルさと使いやすさを重視し、高度なストレージ機能にアクセスできます。
Stratis は、物理ストレージデバイスのプールを管理するためにサービスとして実行され、複雑なストレージ設定のセットアップと管理を支援しながら、ローカルストレージ管理を使いやすく簡素化します。
Stratis は、以下のために使用できます。
- ストレージの初期設定
- その後の変更
- 高度なストレージ機能の使用
Stratis の中心的な概念はストレージプールです。このプールは 1 つ以上のローカルディスクまたはパーティションから作成され、ファイルシステムはプールから作成されます。プールでは次のような機能が有効になります。
- ファイルシステムのスナップショット
- シンプロビジョニング
- キャッシュ
- 暗号化
23.1. Stratis ファイルシステムのコンポーネント
外部的には、Stratis はコマンドラインと API を通じて次のファイルシステムコンポーネントを提供します。
blockdev- ディスクやディスクパーティションなどのブロックデバイス。
pool1 つ以上のブロックデバイスで構成されます。
プールの合計サイズは固定で、ブロックデバイスのサイズと同じです。
プールには、
dm-cacheターゲットを使用した不揮発性データキャッシュなど、ほとんどの Stratis レイヤーが含まれています。Stratis は、各プールの
/dev/stratis/my-pool/ディレクトリーを作成します。このディレクトリーには、プール内の Stratis ファイルシステムを表すデバイスへのリンクが含まれています。
filesystem各プールには 0 個以上のファイルシステムを含めることができます。ファイルシステムを含むプールには、任意の数のファイルを保存できます。
ファイルシステムはシンプロビジョニングされており、合計サイズは固定されていません。ファイルシステムの実際のサイズは、そこに格納されているデータとともに大きくなります。データのサイズがファイルシステムの仮想サイズに近づくと、Stratis はシンボリュームとファイルシステムを自動的に拡張します。
ファイルシステムは XFS ファイルシステムでフォーマットされます。
重要Stratis は、XFS が認識しない、作成されたファイルシステムに関する情報を追跡します。また、XFS を使用して行われた変更によって、Stratis が自動的に更新されることはありません。ユーザーは、Stratis が管理する XFS ファイルシステムを再フォーマットまたは再設定しないでください。
Stratis は、
/dev/stratis/my-pool/my-fsパスにファイルシステムへのリンクを作成します。
Stratis は、dmsetup リストと /proc/partitions ファイルに表示される多くの Device Mapper デバイスを使用します。同様に、lsblk コマンドの出力は、Stratis の内部の仕組みとレイヤーを反映します。
23.2. Stratis と互換性のあるブロックデバイス
Stratis で使用可能なストレージデバイス。
対応デバイス
Stratis プールは、次の種類のブロックデバイスで動作するかどうかをテスト済みです。
- LUKS
- LVM 論理ボリューム
- MD RAID
- DM Multipath
- iSCSI
- HDD および SSD
- NVMe デバイス
23.3. Stratis のインストール
Stratis に必要なパッケージをインストールします。
手順
Stratis サービスとコマンドラインユーティリティーを提供するパッケージをインストールします。
# dnf install stratisd stratis-clistratisdサービスを開始し、ブート時に起動できるようにするには、以下を実行します。# systemctl enable --now stratisd
検証
stratisdサービスが有効になっていて実行されていることを確認します。# systemctl status stratisd stratisd.service - Stratis daemon Loaded: loaded (/usr/lib/systemd/system/stratisd.service; enabled; preset:> Active: active (running) since Tue 2025-03-25 14:04:42 CET; 30min ago Docs: man:stratisd(8) Main PID: 24141 (stratisd) Tasks: 22 (limit: 99365) Memory: 10.4M CPU: 1.436s CGroup: /system.slice/stratisd.service └─24141 /usr/libexec/stratisd --log-level debug
23.4. 暗号化されていない Stratis プールの作成
1 つ以上のブロックデバイスから暗号化されていない Stratis プールを作成できます。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis プールを作成するブロックデバイスは、使用もマウントもされておらず、1 GB 以上の領域がある。
IBM Z アーキテクチャーで、
/dev/dasd*ブロックデバイスがパーティション設定されている。Stratis プールの作成には、パーティションデバイスを使用します。DASD デバイスのパーティション設定の詳細は、IBM Z での Linux インスタンスの設定 を参照してください。
Stratis プールは作成時にのみ暗号化でき、後から暗号化することはできません。
手順
Stratis プールで使用する各ブロックデバイスに存在するファイルシステム、パーティションテーブル、または RAID 署名をすべて削除します。
# wipefs --all block-deviceblock-deviceの値は、ブロックデバイスへのパスです (例:/dev/sdb)。選択したブロックデバイスに新しい暗号化されていない Stratis プールを作成します。
# stratis pool create my-pool block-deviceblock-deviceの値は、空または消去されたブロックデバイスへのパスです。次のコマンドを使用して、1 行に複数のブロックデバイスを指定することもできます。
# stratis pool create my-pool block-device-1 block-device-2
検証
新しい Stratis プールが作成されていることを確認します。
# stratis pool list
23.5. Web コンソールを使用した暗号化されていない Stratis プールの作成
Web コンソールを使用して、1 つ以上のブロックデバイスから暗号化されていない Stratis プールを作成できます。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis プールを作成するブロックデバイスは、使用もマウントもされておらず、1 GB 以上の領域がある。
暗号化されていない Stratis プールの作成後に、当該 Stratis プールを暗号化することはできません。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- をクリックします。
- Storage テーブルで、メニューボタンをクリックし、Create Stratis pool を選択します。
- Name フィールドに、Stratis プールの名前を入力します。
- Stratis プールの作成元となる Block devices を選択します。
- オプション: プールに作成する各ファイルシステムの最大サイズを指定する場合は、Manage filesystem sizes を選択します。
- をクリックします。
検証
- Storage セクションに移動し、Devices テーブルに新しい Stratis プールが表示されていることを確認します。
23.6. カーネルキーリング内のキーを使用して暗号化された Stratis プールを作成する
データを保護するために、カーネルキーリングを使用して、1 つ以上のブロックデバイスから暗号化された Stratis プールを作成できます。
この方法で暗号化された Stratis プールを作成すると、カーネルキーリングはプライマリー暗号化メカニズムとして使用されます。その後のシステムを再起動すると、このカーネルキーリングは、暗号化された Stratis プールのロックを解除します。
1 つ以上のブロックデバイスから暗号化された Stratis プールを作成する場合は、次の点に注意してください。
-
各ブロックデバイスは
cryptsetupライブラリーを使用して暗号化され、LUKS2形式を実装します。 - 各 Stratis プールは、一意の鍵を持つか、他のプールと同じ鍵を共有できます。これらのキーはカーネルキーリングに保存されます。
- Stratis プールを構成するブロックデバイスは、すべて暗号化または暗号化されていないデバイスである必要があります。同じ Stratis プールに、暗号化したブロックデバイスと暗号化されていないブロックデバイスの両方を含めることはできません。
- 暗号化 Stratis プールのデータキャッシュに追加されるブロックデバイスは、自動的に暗号化されます。
前提条件
-
Stratis v2.1.0 以降がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis プールを作成するブロックデバイスは、使用もマウントもされておらず、1 GB 以上の領域がある。
IBM Z アーキテクチャーで、
/dev/dasd*ブロックデバイスがパーティション設定されている。Stratis プールでパーティションを使用します。DASD デバイスのパーティション設定の詳細は、IBM Z での Linux インスタンスの設定 を参照してください。
手順
Stratis プールで使用する各ブロックデバイスに存在するファイルシステム、パーティションテーブル、または RAID 署名をすべて削除します。
# wipefs --all block-deviceblock-deviceの値は、ブロックデバイスへのパスです (例:/dev/sdb)。キーをまだ設定していない場合には、以下のコマンドを実行してプロンプトに従って、暗号化に使用するキーセットを作成します。
# stratis key set --capture-key key-descriptionkey-descriptionは、カーネルキーリングで作成されるキーへの参照になります。コマンドラインで、キー値の入力を求められます。キー値をファイルに配置し、--capture-keyオプションの代わりに--keyfile-pathオプションを使用することもできます。暗号化した Stratis プールを作成し、暗号化に使用すキーの説明を指定します。
# stratis pool create --key-desc key-description my-pool block-devicekey-description- 直前の手順で作成したカーネルキーリングに存在するキーを参照します。
my-pool- 新しい Stratis プールの名前を指定します。
block-device空のブロックデバイスまたは消去したブロックデバイスへのパスを指定します。
次のコマンドを使用して、1 行に複数のブロックデバイスを指定することもできます。
# stratis pool create --key-desc key-description my-pool block-device-1 block-device-2
検証
新しい Stratis プールが作成されていることを確認します。
# stratis pool list
23.7. Clevis を使用して暗号化された Stratis プールを作成する
Stratis 2.4.0 以降では、コマンドラインで Clevis オプションを指定することにより、Clevis メカニズムを使用して暗号化されたプールを作成できます。
前提条件
-
Stratis v2.3.0 以降がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - 暗号化された Stratis プールが作成されている。詳細は、カーネルキーリング内のキーを使用して暗号化された Stratis プールを作成する を参照してください。
- 使用しているシステムは TPM 2.0 をサポートしている。
手順
Stratis プールで使用する各ブロックデバイスに存在するファイルシステム、パーティションテーブル、または RAID 署名をすべて削除します。
# wipefs --all block-deviceblock-deviceの値は、ブロックデバイスへのパスです (例:/dev/sdb)。暗号化された Stratis プールを作成し、暗号化に使用する Clevis メカニズムを指定します。
# stratis pool create --clevis tpm2 my-pool block-devicetpm2- 使用する Clevis 機構を指定します。
my-pool- 新しい Stratis プールの名前を指定します。
block-device空のブロックデバイスまたは消去したブロックデバイスへのパスを指定します。
または、次のコマンドを使用して Clevis tang サーバーメカニズムを使用します。
# stratis pool create --clevis tang --tang-url my-url --thumbprint thumbprint my-pool block-devicetang- 使用する Clevis 機構を指定します。
my-url- tang サーバーの URL を指定します。
thumbprinttang サーバーの thumbprint を参照します。
次のコマンドを使用して、1 行に複数のブロックデバイスを指定することもできます。
# stratis pool create --clevis tpm2 my-pool block-device-1 block-device-2
検証
新しい Stratis プールが作成されていることを確認します。
# stratis pool list注記プール作成時に Clevis と keyring の両方のオプションを同時に指定することで、Clevis と keyring の両方のメカニズムを使用して暗号化されたプールを作成することもできます。
23.8. storage RHEL システムロールを使用して暗号化された Stratis プールを作成する
データを保護するために、storage RHEL システムロールを使用して暗号化された Stratis プールを作成できます。パスフレーズに加えて、暗号化方法として Clevis と Tang または TPM 保護を使用できます。
Stratis 暗号化はプール全体でのみ設定できます。
前提条件
- コントロールノードと管理対象ノードの準備が完了している。
-
管理対象ノードへの接続に使用するアカウントに、そのノードに対する
sudo権限がある。 - Tang サーバーに接続できる。詳細は、SELinux を Enforcing モードで有効にした Tang サーバーのデプロイメント を参照してください。
手順
機密性の高い変数を暗号化されたファイルに保存します。
vault を作成します。
$ ansible-vault create ~/vault.yml New Vault password: <vault_password> Confirm New Vault password: <vault_password>ansible-vault createコマンドでエディターが開いたら、機密データを<key>: <value>形式で入力します。luks_password: <password>- 変更を保存して、エディターを閉じます。Ansible は vault 内のデータを暗号化します。
次の内容を含む Playbook ファイル (例:
~/playbook.yml) を作成します。--- - name: Manage local storage hosts: managed-node-01.example.com vars_files: - ~/vault.yml tasks: - name: Create a new encrypted Stratis pool with Clevis and Tang ansible.builtin.include_role: name: redhat.rhel_system_roles.storage vars: storage_pools: - name: mypool disks: - sdd - sde type: stratis encryption: true encryption_password: "{{ luks_password }}" encryption_clevis_pin: tang encryption_tang_url: tang-server.example.com:7500サンプル Playbook で指定されている設定は次のとおりです。
encryption_password- LUKS ボリュームのロックを解除するために使用するパスワードまたはパスフレーズ。
encryption_clevis_pin-
作成されたプールを暗号化するために使用できる Clevis の方式。
tangとtpm2を使用できます。 encryption_tang_url- Tang サーバーの URL。
Playbook で使用されるすべての変数の詳細は、コントロールノードの
/usr/share/ansible/roles/rhel-system-roles.storage/README.mdファイルを参照してください。Playbook の構文を検証します。
$ ansible-playbook --ask-vault-pass --syntax-check ~/playbook.ymlこのコマンドは構文を検証するだけであり、有効だが不適切な設定から保護するものではないことに注意してください。
Playbook を実行します。
$ ansible-playbook --ask-vault-pass ~/playbook.yml
検証
Clevis と Tang が設定された状態でプールが作成されたことを確認します。
$ ansible managed-node-01.example.com -m command -a 'sudo stratis report' ... "clevis_config": { "thp": "j-G4ddvdbVfxpnUbgxlpbe3KutSKmcHttILAtAkMTNA", "url": "tang-server.example.com:7500" }, "clevis_pin": "tang", "in_use": true, "key_description": "blivet-mypool",
23.9. Web コンソールを使用した暗号化された Stratis プールの作成
データを保護するために、Web コンソールを使用して、1 つ以上のブロックデバイスから暗号化された Stratis プールを作成できます。
1 つ以上のブロックデバイスから暗号化された Stratis プールを作成する場合は、次の点に注意してください。
- 各ブロックデバイスは cryptsetup ライブラリーを使用して暗号化され、LUKS2 形式を実装します。
- 各 Stratis プールは、一意の鍵を持つか、他のプールと同じ鍵を共有できます。これらのキーはカーネルキーリングに保存されます。
- Stratis プールを構成するブロックデバイスは、すべて暗号化または暗号化されていないデバイスである必要があります。同じ Stratis プールに、暗号化したブロックデバイスと暗号化されていないブロックデバイスの両方を含めることはできません。
- 暗号化 Stratis プールのデータ層に追加されるブロックデバイスは、自動的に暗号化されます。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
Stratis v2.1.0 以降がインストールされ、
stratisdサービスが実行されている。 - Stratis プールを作成するブロックデバイスは、使用もマウントもされておらず、1 GB 以上の領域がある。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- をクリックします。
- Storage テーブルで、メニューボタンをクリックし、Create Stratis pool を選択します。
- Name フィールドに、Stratis プールの名前を入力します。
- Stratis プールの作成元となる Block devices を選択します。
暗号化のタイプを選択します。パスフレーズ、Tang キーサーバー、またはその両方を使用できます。
パスフレーズ:
- パスフレーズを入力します。
- パスフレーズを確定します。
Tang キーサーバー:
- キーサーバーのアドレスを入力します。詳細は、SELinux を Enforcing モードで有効にした Tang サーバーのデプロイメント を参照してください。
- オプション: プールに作成する各ファイルシステムの最大サイズを指定する場合は、Manage filesystem sizes を選択します。
- をクリックします。
検証
- Storage セクションに移動し、Devices テーブルに新しい Stratis プールが表示されていることを確認します。
23.10. Web コンソールを使用した Stratis プールの名前変更
Web コンソールを使用して、既存の Stratis プールの名前を変更できます。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
Stratis がインストールされ、
stratisdサービスが実行されている。Web コンソールがデフォルトで Stratis を検出してインストールしている。ただし、Stratis を手動でインストールする場合は、Stratis のインストール を参照してください。
- Stratis プールが作成されている。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- をクリックします。
- Storage テーブルで、名前を変更する Stratis プールをクリックします。
- Stratis pool ページで、Name フィールドの横にある をクリックします。
- Rename Stratis pool ダイアログボックスで、新しい名前を入力します。
- をクリックします。
23.11. Stratis ファイルシステムでのオーバープロビジョニングモードの設定
デフォルトでは、すべての Stratis プールはオーバープロビジョニングされており、論理ファイルシステムのサイズが物理的に割り当てられた領域を超える可能性があります。Stratis はファイルシステムの使用状況を監視し、必要に応じて使用可能な領域を使用して割り当てを自動的に増やします。ただし、すでに使用可能な領域がすべて割り当てられており、プールがいっぱいの場合は、ファイルシステムに追加領域を割り当てることはできません。
ファイルシステムの容量が不足すると、ユーザーはデータを失う可能性があります。データ損失のリスクがオーバープロビジョニングの利点を上回るアプリケーションの場合、この機能を無効にできます。
Stratis はプールの使用状況を継続的に監視し、D-Bus API を使用して値を報告します。ストレージ管理者はこれらの値を監視し、容量に達しないように必要に応じてデバイスをプールに追加する必要があります。
前提条件
- Stratis がインストールされている。詳細は、Stratis のインストール を参照してください。
手順
プールを正しく設定するには、次の 2 つの方法があります。
1 つ以上のブロックデバイスからプールを作成して、作成時にプールが完全にプロビジョニングされるようにします。
# stratis pool create --no-overprovision pool-name /dev/sdb-
--no-overprovisionオプションを使用すると、プールは実際に利用可能な物理領域よりも多くの論理領域を割り当てることができません。
-
既存のプールにオーバープロビジョニングモードを設定します。
# stratis pool overprovision pool-name <yes|no>- "yes" に設定すると、プールへのオーバープロビジョニングが有効になります。これは、プールによってサポートされる Stratis ファイルシステムの論理サイズの合計が、利用可能なデータ領域の量を超える可能性があることを意味します。プールがオーバープロビジョニングされ、すべてのファイルシステムの論理サイズの合計がプールで使用可能な領域を超える場合、システムはオーバープロビジョニングをオフにできず、エラーを返します。
検証
Stratis プールの完全なリストを表示します。
# stratis pool list Name Total Physical Properties UUID Alerts pool-name 1.42 TiB / 23.96 MiB / 1.42 TiB ~Ca,~Cr,~Op cb7cb4d8-9322-4ac4-a6fd-eb7ae9e1e540-
stratis pool listの出力に、プールのオーバープロビジョニングモードフラグが表示されているかどうかを確認します。" ~ " は "NOT" を表す数学記号であるため、~Opはオーバープロビジョニングなしという意味です。 オプション: 特定のプールのオーバープロビジョニングを確認します。
# stratis pool overprovision pool-name yes # stratis pool list Name Total Physical Properties UUID Alerts pool-name 1.42 TiB / 23.96 MiB / 1.42 TiB ~Ca,~Cr,~Op cb7cb4d8-9322-4ac4-a6fd-eb7ae9e1e540
23.12. Stratis プールの NBDE へのバインド
暗号化された Stratis プールを Network Bound Disk Encryption (NBDE) にバインドするには、Tang サーバーが必要です。Stratis プールを含むシステムが再起動すると、Tang サーバーに接続して、カーネルキーリングの説明を指定しなくても、暗号化したプールのロックを自動的に解除します。
Stratis プールを補助 Clevis 暗号化メカニズムにバインドすると、プライマリーカーネルキーリング暗号化は削除されません。
前提条件
-
Stratis v2.3.0 以降がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - 暗号化した Stratis プールを作成し、暗号化に使用したキーの説明がある。詳細は、カーネルキーリング内のキーを使用して暗号化された Stratis プールを作成する を参照してください。
- Tang サーバーに接続できる。詳細は、SELinux を Enforcing モードで有効にした Tang サーバーのデプロイメント を参照してください。
手順
暗号化された Stratis プールを NBDE にバインドする。
# stratis pool bind nbde --trust-url my-pool tang-servermy-pool- 暗号化された Stratis プールの名前を指定します。
tang-server- Tang サーバーの IP アドレスまたは URL を指定します。
23.13. Stratis プールの TPM へのバインド
暗号化された Stratis プールを Trusted Platform Module (TPM) 2.0 にバインドすると、プールを含むシステムが再起動され、カーネルキーリングの説明を指定しなくても、プールは自動的にロック解除されます。
前提条件
-
Stratis v2.3.0 以降がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - 暗号化した Stratis プールを作成し、暗号化に使用したキーの説明がある。詳細は、カーネルキーリング内のキーを使用して暗号化された Stratis プールを作成する を参照してください。
- 使用しているシステムは TPM 2.0 をサポートしている。
手順
暗号化された Stratis プールを TPM にバインドします。
# stratis pool bind tpm my-poolmy-pool- 暗号化された Stratis プールの名前を指定します。
key-description- 暗号化された Stratis プールの作成時に生成されたカーネルキーリングに存在するキーを参照します。
23.14. カーネルキーリングを使用した暗号化 Stratis プールのロック解除
システムの再起動後、暗号化した Stratis プール、またはこれを構成するブロックデバイスが表示されない場合があります。プールの暗号化に使用したカーネルキーリングを使用して、プールのロックを解除できます。
前提条件
-
Stratis v2.1.0 がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - 暗号化された Stratis プールが作成されている。詳細は、カーネルキーリング内のキーを使用して暗号化された Stratis プールを作成する を参照してください。
手順
以前使用したものと同じキー記述を使用して、キーセットを再作成します。
# stratis key set --capture-key key-descriptionkey-descriptionは、暗号化された Stratis プールの作成時に生成されたカーネルキーリングに存在するキーを参照します。Stratis プールが表示されることを確認します。
# stratis pool list
23.15. 補助暗号化からの Stratis プールのバインド解除
暗号化した Stratis プールを、サポート対象の補助暗号化メカニズムからバインドを解除すると、プライマリーカーネルキーリングの暗号化はそのまま残ります。これは、最初から Clevis 暗号化を使用して作成されたプールには当てはまりません。
前提条件
- Stratis v2.3.0 以降がシステムにインストールされている。詳細は、Stratis のインストール を参照してください。
- 暗号化された Stratis プールが作成されている。詳細は、カーネルキーリング内のキーを使用して暗号化された Stratis プールを作成する を参照してください。
- 暗号化した Stratis プールは、サポート対象の補助暗号化メカニズムにバインドされます。
手順
補助暗号化メカニズムから暗号化された Stratis プールのバインドを解除します。
# stratis pool unbind clevis my-poolmy-poolは、バインドを解除する Stratis プールの名前を指定します。
23.16. Stratis プールの開始および停止
Stratis プールを開始および停止できます。この操作により、ファイルシステム、キャッシュデバイス、シンプール、暗号化されたデバイスなど、プールの構築に使用されたすべてのオブジェクトを解体または停止できます。プールがデバイスまたはファイルシステムをアクティブに使用している場合は、警告が表示され、停止できない可能性があることに注意してください。
停止状態は、プールのメタデータに記録されます。これらのプールは、プールが開始コマンドを受信するまで、次のブートでは開始されません。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - 暗号化されていない、または暗号化された Stratis プールを作成した。詳細は、暗号化されていない Stratis プールの作成 または カーネルキーリング内のキーを使用して暗号化された Stratis プールを作成する を参照してください。
手順
次のコマンドを使用して、Stratis プールを停止します。これにより、ストレージスタックが切断されますが、メタデータはすべて保持されます。
# stratis pool stop --name pool-name以下のコマンドを使用して Stratis プールを起動します。
--unlock-methodオプションは、プールが暗号化されている場合にプールのロックを解除する方法を指定します。# stratis pool start --unlock-method <keyring|clevis> --name pool-name注記プール名またはプール UUID のいずれかを使用してプールを開始できます。
検証
次のコマンドを使用して、システム上のすべてのアクティブなプールをリスト表示します。
# stratis pool list次のコマンドを使用して、停止されたプールをすべてリスト表示します。
# stratis pool list --stopped次のコマンドを使用して、停止したプールの詳細情報を表示します。UUID を指定すると、このコマンドは UUID に対応するプールに関する詳細情報を出力します。
# stratis pool list --stopped --uuid UUID
23.17. Stratis ファイルシステムの作成
既存の Stratis プールに Stratis ファイルシステムを作成します。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis プールが作成されている。詳細は、暗号化されていない Stratis プールの作成 または カーネルキーリング内のキーの使用 を参照してください。
手順
プールに Stratis ファイルシステムを作成します。
# stratis filesystem create --size number-and-unit my-pool my-fsnumber-and-unit- ファイルシステムのサイズを指定します。仕様形式は、入力の標準サイズ指定形式 (B、KiB、MiB、GiB、TiB、または PiB) に準拠する必要があります。
my-pool- Stratis プールの名前を指定します。
my-fsファイルシステムの任意名を指定します。
以下に例を示します。
例23.1 Stratis ファイルシステムの作成
# stratis filesystem create --size 10GiB pool1 filesystem1
ファイルシステムのサイズ制限を設定します。
# stratis filesystem create --size number-and-unit --size-limit number-and-unit my-pool my-fs注記このオプションは、Stratis 3.6.0 以降で利用できます。
必要に応じて、後でサイズ制限を削除することもできます。
# stratis filesystem unset-size-limit my-pool my-fs
検証
プール内のファイルシステムをリスト表示して、Stratis ファイルシステムが作成されているかどうかを確認します。
# stratis fs list my-pool
23.18. Web コンソールを使用した Stratis プール上のファイルシステムの作成
Web コンソールを使用して、既存の Stratis プール上にファイルシステムを作成できます。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
stratisdサービスを実行している。 - Stratis プールが作成されている。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- をクリックします。
- ファイルシステムを作成する Stratis プールをクリックします。
- Stratis pool ページで、Stratis filesystems セクションまでスクロールし、 をクリックします。
- ファイルシステムの名前を入力します。
- ファイルシステムのマウントポイントを入力します。
- マウントオプションを選択します。
- At boot ドロップダウンメニューで、ファイルシステムをマウントするタイミングを選択します。
ファイルシステムを作成します。
- ファイルシステムを作成してマウントする場合は、 をクリックします。
- ファイルシステムの作成のみを行う場合は、 をクリックします。
検証
- 新しいファイルシステムは、Stratis pool ページの Stratis filesystems タブに表示されます。
23.19. Stratis ファイルシステムのマウント
既存の Stratis ファイルシステムをマウントして、コンテンツにアクセスします。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis ファイルシステムが作成されます。詳細は、Stratis ファイルシステムの作成 を参照してください。
手順
ファイルシステムをマウントするには、
/dev/stratis/ディレクトリーに Stratis が維持するエントリーを使用します。# mount /dev/stratis/my-pool/my-fs mount-point
これでファイルシステムは mount-point ディレクトリーにマウントされ、使用できるようになりました。
プールを停止する前に、プールに属するすべてのファイルシステムをアンマウントします。ファイルシステムがまだマウントされている場合、プールは停止しません。
23.20. systemd サービスを使用した /etc/fstab での非ルート Stratis ファイルシステムの設定
systemd サービスを使用して、/etc/fstab で非ルートファイルシステムの設定を管理できます。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis ファイルシステムが作成されます。詳細は、Stratis ファイルシステムの作成 を参照してください。
手順
root として、
/etc/fstabファイルを編集し、非ルートファイルシステムを設定するための行を追加します。/dev/stratis/my-pool/my-fs mount-point xfs defaults,x-systemd.requires=stratis-fstab-setup@pool-uuid.service,x-systemd.after=stratis-fstab-setup@pool-uuid.service dump-value fsck_value
暗号化された Stratis プールから Stratis ファイルシステムを永続的にマウントすると、パスワードが入力されるまでブートプロセスが停止する可能性があります。プールが NBDE や TPM2 などの無人メカニズムを使用して暗号化されている場合、Stratis プールは自動的にロック解除されます。そうでない場合、ユーザーはコンソールにパスワードを入力する必要があります。
第24章 追加のブロックデバイスで Stratis プールを拡張する
Stratis ファイルシステムのストレージ容量を増やすために、追加のブロックデバイスを Stratis プールに追加できます。手動で行うことも、Web コンソールを使用して行うこともできます。
24.1. Stratis プールへのブロックデバイスの追加
Stratis プールに 1 つ以上のブロックデバイスを追加できます。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis プールを作成するブロックデバイスは、使用もマウントもされておらず、1 GB 以上の領域がある。
手順
1 つ以上のブロックデバイスをプールに追加するには、以下を使用します。
# stratis pool add-data my-pool device-1 device-2 device-n
24.2. Web コンソールを使用した Stratis プールへのブロックデバイスの追加
Web コンソールを使用して、既存の Stratis プールにブロックデバイスを追加できます。キャッシュをブロックデバイスとして追加することもできます。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
stratisdサービスを実行している。 - Stratis プールが作成されている。
- Stratis プールを作成するブロックデバイスは、使用もマウントもされておらず、1 GB 以上の領域がある。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- をクリックします。
- Storage テーブルで、ブロックデバイスを追加する Stratis プールをクリックします。
- Stratis pool ページで、 をクリックし、ブロックデバイスをデータまたはキャッシュとして追加する Tier を選択します。
- パスフレーズで暗号化された Stratis プールにブロックデバイスを追加する場合は、パスフレーズを入力します。
- Block devices で、プールに追加するデバイスを選択します。
- をクリックします。
第25章 Stratis ファイルシステムの監視
Stratis ユーザーは、システムにある Stratis ファイルシステムに関する情報を表示して、その状態と空き容量を監視できます。
25.1. Stratis ファイルシステムに関する情報の表示
stratis ユーティリティーを使用すると、Stratis ファイルシステムの合計サイズ、使用サイズ、空きサイズ、プールに属するファイルシステムとブロックデバイスなどに関する統計情報をリスト表示できます。
XFS ファイルシステムのサイズは、管理できるユーザーデータの合計量です。シンプロビジョニングされた Stratis プールでは、Stratis ファイルシステムのサイズが、割り当てられた領域よりも大きいように見える場合があります。XFS ファイルシステムのサイズは、この見かけのサイズに合わせて設定されます。つまり、通常は割り当てられた領域よりも大きくなります。df などの標準 Linux ユーティリティーは、XFS ファイルシステムのサイズを報告します。この値は通常、XFS ファイルシステムに必要な領域、つまり Stratis によって割り当てられた領域を過大評価します。
オーバープロビジョニングされた Stratis プールの使用状況を定期的に監視してください。ファイルシステムの使用量が割り当てられた領域に近づくと、Stratis はプール内の使用可能な領域を使用して割り当てを自動的に増加します。ただし、すでに使用可能な領域がすべて割り当てられていて、プールがいっぱいの場合は、追加の領域を割り当てることができず、ファイルシステムの領域が不足することになります。これにより、Stratis ファイルシステムを使用するアプリケーションでデータが失われるリスクが生じる可能性があります。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。
手順
システムで Stratis に使用されているすべての ブロックデバイス に関する情報を表示する場合は、次のコマンドを実行します。
# stratis blockdev Pool Name Device Node Physical Size Tier UUID my-pool /dev/sdb 9.10 TiB Data ec9fb718-f83c-11ef-861e-7446a09dccfbシステムにあるすべての Stratis プール に関する情報を表示するには、次のコマンドを実行します。
+
# *stratis pool*
Name Total/Used/Free Properties UUID Alerts
[replaceable]_my-pool_ 8.00 GiB / 800.99 MiB / 7.22 GiB -Ca,-Cr,Op e22772c2-afe9-446c-9be5-2f78f682284e WS001システムにあるすべての Stratis ファイルシステム に関する情報を表示するには、次のコマンドを実行します。
# stratis filesystem Pool Filesystem Total/Used/Free/Limit Device UUID Spool1 sfs1 1 TiB / 546 MiB / 1023.47 GiB / None /dev/stratis/spool1/sfs1 223265f5-8f17-4cc2-bf12-c3e9e71ff7bf
ファイルシステム名または UUID を指定して、システム上の Stratis ファイルシステムに関する詳細情報を表示することもできます。
# stratis filesystem list my-pool --name my-fs
UUID: 47255008-9bc7-4bd2-8294-e9d25cd9e7ba
Name: my-fs
Pool: my-pool
Device: /dev/stratis/my-pool/my-fs
Created: Nov 08 2018 08:03
Snapshot origin: None
Sizes:
Logical size of thin device: 1 TiB
Total used (including XFS metadata): 546 MiB
Free: 1023.47 GiB
Size Limit: None25.2. Web コンソールを使用した Stratis プールの表示
Web コンソールを使用して、既存の Stratis プールとそれに含まれるファイルシステムを表示できます。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
stratisdサービスを実行している。 - 既存の Stratis プールがある。
手順
- RHEL 9 Web コンソールにログインします。
- をクリックします。
Storage テーブルで、表示する Stratis プールをクリックします。
Stratis プールページには、プールおよびプール内に作成したファイルシステムに関するすべての情報が表示されます。
第26章 Stratis ファイルシステムでのスナップショットの使用
Stratis ファイルシステムのスナップショットを使用して、ファイルシステムの状態を任意の時点でキャプチャーし、後でそれを復元できます。
26.1. Stratis スナップショットの特徴
Stratis では、スナップショットは、別の Stratis ファイルシステムのコピーとして作成した通常の Stratis ファイルシステムです。
Stratis の現在のスナップショット実装は、次のような特徴があります。
- ファイルシステムのスナップショットは別のファイルシステムです。
- スナップショットと元のファイルシステムのリンクは、有効期間中は行われません。スナップショットされたファイルシステムは、元のファイルシステムよりも長く存続します。
- スナップショットを作成するためにファイルシステムをマウントする必要はありません。
- 各スナップショットは、XFS ログに必要となる実際のバッキングストレージの約半分のギガバイトを使用します。
26.2. Stratis スナップショットの作成
既存の Stratis ファイルシステムのスナップショットとして Stratis ファイルシステムを作成できます。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis ファイルシステムを作成している。詳細は、Stratis ファイルシステムの作成 を参照してください。
手順
Stratis スナップショットを作成します。
# stratis fs snapshot my-pool my-fs my-fs-snapshot
スナップショットは、中心的な Stratis ファイルシステムです。Stratis スナップショットは複数作成できます。単一のオリジンファイルシステム、または別のスナップショットファイルシステムのスナップショットがあります。ファイルシステムがスナップショットの場合、origin フィールドには、詳細なファイルシステムリストの元のファイルシステムの UUID が表示されます。
26.3. Stratis スナップショットのコンテンツへのアクセス
Stratis ファイルシステムのスナップショットを、読み取りおよび書き込み操作でアクセスできるようにマウントすることができます。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis スナップショットを作成している。詳細は、Stratis スナップショットの作成 を参照してください。
手順
スナップショットにアクセスするには、
/dev/stratis/my-pool/ディレクトリーから通常のファイルシステムとしてマウントします。# mount /dev/stratis/my-pool/my-fs-snapshot mount-point
26.4. Stratis ファイルシステムを以前のスナップショットに戻す
Stratis ファイルシステムの内容を、Stratis スナップショットでキャプチャーされた状態に戻すことができます。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis スナップショットを作成している。詳細は、Stratis スナップショットの作成 を参照してください。
手順
オプション: 後でアクセスできるように、ファイルシステムの現在の状態をバックアップします。
# stratis filesystem snapshot my-pool my-fs my-fs-backupファイルシステムを以前に取得したスナップショットに戻すスケジュールを設定します。
# stratis filesystem schedule-revert my-pool my-fs-snapshotオプション: 次のコマンドを実行して、元に戻す操作が正常にスケジュールされているかどうかを確認します。
# stratis filesystem list my-pool --name my-fs-snapshot UUID: b14987eb-b735-4c68-8962-f53f6b644cbc Name: my-fs-snapshot Pool: my-pool Device: /dev/stratis/p1/my-fs-snapshot Created: Mar 18 2025 12:29 Snapshot origin: f5a881b1-299d-4147-8ead-b4a56c623692 Revert scheduled: Yes Sizes: Logical size of thin device: 1 TiB Total used (including XFS metadata): 5.42 GiB Free: 1018.58 GiB注記同じ元のファイルシステムに対して、元に戻す操作を複数スケジュールすることはできません。また、元のファイルシステムまたは復元がスケジュールされているスナップショットのいずれかを破棄しようとすると、破棄操作は失敗します。
プールを再起動する前に、いつでも元に戻す操作をキャンセルできます。
# stratis filesystem cancel-revert my-pool my-fs-snapshot次のコマンドを実行して、キャンセルが正常にスケジュールされているかどうかを確認できます。
# stratis filesystem list my-pool --name my-fs-snapshot UUID: b14987eb-b735-4c68-8962-f53f6b644cbc Name: my-fs-snapshot Pool: my-pool Device: /dev/stratis/p1/my-fs-snapshot Created: Mar 18 2025 12:29 Snapshot origin: f5a881b1-299d-4147-8ead-b4a56c623692 Revert scheduled: No Sizes: Logical size of thin device: 1 TiB Total used (including XFS metadata): 5.42 GiB Free: 1018.58 GiB Size Limit: Noneキャンセルされていない場合は、プールの再起動時にスケジュールされた元に戻す操作が続行されます。
# stratis pool stop --name my-pool # stratis pool start --name my-pool
検証
プールに属するファイルシステムをリスト表示します。
# stratis filesystem list my-pool
my-fs-snapshot は、以前にコピーされた my-fs-snapshot 状態に戻されたため、プール内のファイルシステムのリストに表示されなくなりました。my-fs という名前のファイルシステムの内容は、スナップショット my-fs-snapshot と同じになりました。
26.5. Stratis スナップショットの削除
プールから Stratis スナップショットを削除できます。スナップショットのデータは失われます。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis スナップショットを作成している。詳細は、Stratis スナップショットの作成 を参照してください。
手順
スナップショットをアンマウントします。
# umount /dev/stratis/my-pool/my-fs-snapshotスナップショットを破棄します。
# stratis filesystem destroy my-pool my-fs-snapshot
第27章 Stratis ファイルシステムの削除
既存の Stratis ファイルシステムまたはプールを削除できます。削除した Stratis ファイルシステムやプールは復元できません。
27.1. Stratis ファイルシステムの削除
既存の Stratis ファイルシステムを削除できます。そこに保存されているデータは失われます。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 - Stratis ファイルシステムを作成している。詳細は、Stratis ファイルシステムの作成 を参照してください。
手順
ファイルシステムをアンマウントします。
# umount /dev/stratis/my-pool/my-fsファイルシステムを破棄します。
# stratis filesystem destroy my-pool my-fs
検証
ファイルシステムがもう存在しないことを確認します。
# stratis filesystem list my-pool
27.2. Web コンソールを使用した Stratis プールからのファイルシステムの削除
Web コンソールを使用して、既存の Stratis プールからファイルシステムを削除できます。
Stratis プールのファイルシステムを削除すると、そこに含まれるすべてのデータが消去されます。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
Stratis がインストールされ、
stratisdサービスが実行されている。Web コンソールがデフォルトで Stratis を検出してインストールしている。ただし、Stratis を手動でインストールする場合は、Stratis のインストール を参照してください。
- 既存の Stratis プールがあり、その Stratis プール上にファイルシステムが作成されている。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- をクリックします。
- Storage テーブルで、ファイルシステムを削除する Stratis プールをクリックします。
- Stratis pool ページで、Stratis filesystems セクションまでスクロールし、削除するファイルシステムのメニューボタン をクリックします。
- ドロップダウンメニューから を選択します。
- Confirm deletion ダイアログボックスで、 をクリックします。
27.3. Stratis プールの削除
既存の Stratis プールを削除できます。そこに保存されているデータは失われます。
前提条件
-
Stratis がインストールされ、
stratisdサービスが実行されている。詳細は、Stratis のインストール を参照してください。 Stratis プールを作成している。
- 暗号化されていないプールを作成するには、暗号化されていない Stratis プールの作成 を参照してください。
- 暗号化されたプールを作成するには、カーネルキーリング内のキーを使用して暗号化された Stratis プールを作成する を参照してください。
手順
プールにあるファイルシステムのリストを表示します。
# stratis filesystem list my-poolプール上のすべてのファイルシステムをアンマウントします。
# umount /dev/stratis/my-pool/my-fs-1 \ /dev/stratis/my-pool/my-fs-2 \ /dev/stratis/my-pool/my-fs-nファイルシステムを破棄します。
# stratis filesystem destroy my-pool my-fs-1 my-fs-2プールを破棄します。
# stratis pool destroy my-pool
検証
プールがなくなったことを確認します。
# stratis pool list
27.4. Web コンソールを使用した Stratis プールの削除
Web コンソールを使用して、既存の Stratis プールを削除できます。
Stratis プールを削除すると、そこに含まれるすべてのデータが消去されます。
前提条件
- RHEL 9 Web コンソールがインストールされている。
- cockpit サービスが有効になっている。
ユーザーアカウントが Web コンソールにログインできる。
手順は、Web コンソールのインストールおよび有効化 を参照してください。
-
stratisdサービスを実行している。 - 既存の Stratis プールがある。
手順
RHEL 9 Web コンソールにログインします。
詳細は、Web コンソールへのログイン を参照してください。
- をクリックします。
- Storage テーブルで、削除する Stratis プールのメニューボタン をクリックします。
- ドロップダウンメニューから を選択します。
- Permanently delete pool ダイアログボックスで、 をクリックします。