Chapter 1. Overview
From the perspective of a Ceph client, interacting with the Ceph storage cluster is remarkably simple:
- Connect to the Cluster
- Create a Pool I/O Context
This remarkably simple interface is how a Ceph client selects one of the storage strategies you define. Storage strategies are invisible to the Ceph client in all but storage capacity and performance.
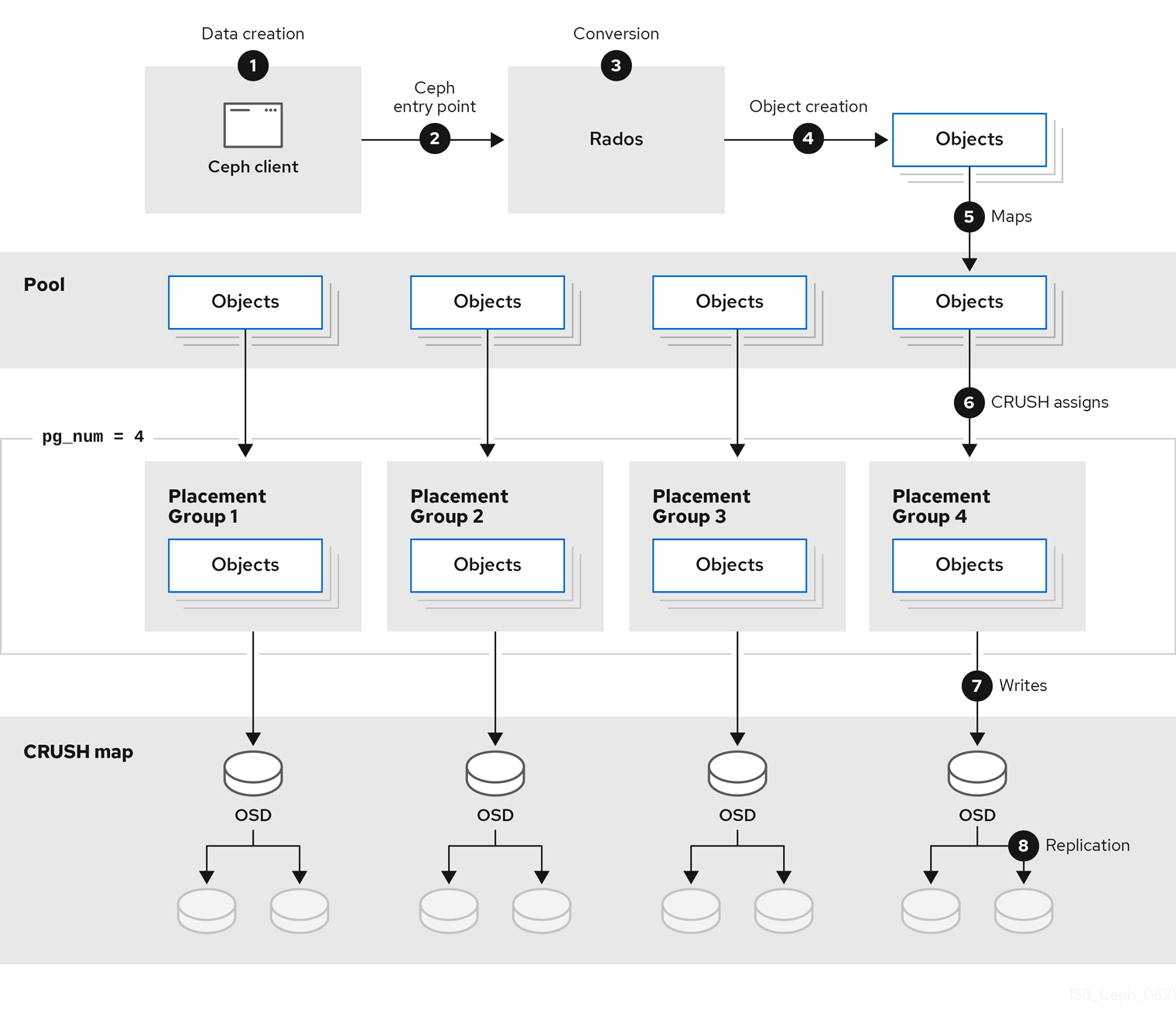
The diagram below shows the logical data flow starting from the client into the Red Hat Ceph Storage cluster.
1.1. What are Storage Strategies?
A storage strategy is a method of storing data that serves a particular use case. For example, if you need to store volumes and images for a cloud platform like OpenStack, you might choose to store data on reasonably performant SAS drives with SSD-based journals. By contrast, if you need to store object data for an S3- or Swift-compliant gateway, you might choose to use something more economical, like SATA drives. Ceph can accommodate both scenarios in the same Ceph cluster, but you need a means of providing the SAS/SSD storage strategy to the cloud platform (for example, Glance and Cinder in OpenStack), and a means of providing SATA storage for your object store.
Storage strategies include the storage media (hard drives, SSDs, and the rest), the CRUSH maps that set up performance and failure domains for the storage media, the number of placement groups, and the pool interface. Ceph supports multiple storage strategies. Use cases, cost/benefit performance tradeoffs and data durability are the primary considerations that drive storage strategies.
- Use Cases: Ceph provides massive storage capacity, and it supports numerous use cases. For example, the Ceph Block Device client is a leading storage backend for cloud platforms like OpenStack—providing limitless storage for volumes and images with high performance features like copy-on-write cloning. By contrast, the Ceph Object Gateway client is a leading storage backend for cloud platforms that provides RESTful S3-compliant and Swift-compliant object storage for objects like audio, bitmap, video and other data.
- Cost/Benefit of Performance: Faster is better. Bigger is better. High durability is better. However, there is a price for each superlative quality, and a corresponding cost/benefit trade off. Consider the following use cases from a performance perspective: SSDs can provide very fast storage for relatively small amounts of data and journaling. Storing a database or object index might benefit from a pool of very fast SSDs, but prove too expensive for other data. SAS drives with SSD journaling provide fast performance at an economical price for volumes and images. SATA drives without SSD journaling provide cheap storage with lower overall performance. When you create a CRUSH hierarchy of OSDs, you need to consider the use case and an acceptable cost/performance trade off.
-
Durability: In large scale clusters, hardware failure is an expectation, not an exception. However, data loss and service interruption remain unacceptable. For this reason, data durability is very important. Ceph addresses data durability with multiple deep copies of an object or with erasure coding and multiple coding chunks. Multiple copies or multiple coding chunks present an additional cost/benefit tradeoff: it’s cheaper to store fewer copies or coding chunks, but it might lead to the inability to service write requests in a degraded state. Generally, one object with two additional copies (that is,
size = 3) or two coding chunks might allow a cluster to service writes in a degraded state while the cluster recovers. The CRUSH algorithm aids this process by ensuring that Ceph stores additional copies or coding chunks in different locations within the cluster. This ensures that the failure of a single storage device or node doesn’t lead to a loss of all of the copies or coding chunks necessary to preclude data loss.
You can capture use cases, cost/benefit performance tradeoffs and data durability in a storage strategy and present it to a Ceph client as a storage pool.
Ceph’s object copies or coding chunks make RAID obsolete. Do not use RAID, because Ceph already handles data durability, a degraded RAID has a negative impact on performance, and recovering data using RAID is substantially slower than using deep copies or erasure coding chunks.
1.2. Configuring Storage Strategies
Configuring storage strategies is about assigning Ceph OSDs to a CRUSH hierarchy, defining the number of placement groups for a pool, and creating a pool. The general steps are:
- Define a Storage Strategy: Storage strategies require you to analyze your use case, cost/benefit performance tradeoffs and data durability. Then, you create OSDs suitable for that use case. For example, you can create SSD-backed OSDs for a high performance pool; SAS drive/SSD journal-backed OSDs for high-performance block device volumes and images; or, SATA-backed OSDs for low cost storage. Ideally, each OSD for a use case should have the same hardware configuration so that you have a consistent performance profile.
-
Define a CRUSH Hierarchy: Ceph rules select a node (usually the
root) in a CRUSH hierarchy, and identify the appropriate OSDs for storing placement groups and the objects they contain. You must create a CRUSH hierarchy and a CRUSH rule for your storage strategy. CRUSH hierarchies get assigned directly to a pool by the CRUSH rule setting. - Calculate Placement Groups: Ceph shards a pool into placement groups. You need to set an appropriate number of placement groups for your pool, and remain within a healthy maximum number of placement groups in the event that you assign multiple pools to the same CRUSH rule.
-
Create a Pool: Finally, you must create a pool and determine whether it uses replicated or erasure-coded storage. You must set the number of placement groups for the pool, the rule for the pool and the durability (size or
K+Mcoding chunks).
Remember, the pool is the Ceph client’s interface to the storage cluster, but the storage strategy is completely transparent to the Ceph client (except for capacity and performance).