Managing, monitoring, and updating the kernel
A guide to managing the Linux kernel on Red Hat Enterprise Linux 10
Abstract
Providing feedback on Red Hat documentation
We are committed to providing high-quality documentation and value your feedback. To help us improve, you can submit suggestions or report errors through the Red Hat Jira tracking system.
Procedure
Log in to the Jira website.
If you do not have an account, select the option to create one.
- Click Create in the top navigation bar.
- Enter a descriptive title in the Summary field.
- Enter your suggestion for improvement in the Description field. Include links to the relevant parts of the documentation.
- Click Create at the bottom of the window.
Chapter 1. The Linux kernel
The Red Hat kernel RPM package provides the Linux kernel. You must keep the kernel updated to ensure your system has the latest bug fixes, performance enhancements, patches, and hardware compatibility.
1.1. What the kernel is
The kernel is a core part of a Linux operating system that manages the system resources and provides an interface between hardware and software applications.
The Red Hat kernel is a custom-built kernel based on the upstream Linux mainline kernel that Red Hat engineers further develop and harden with a focus on stability and compatibility with the latest technologies and hardware.
The Red Hat kernels are packaged in the RPM format to upgrade and verify by the DNF package manager.
Red Hat only supports kernels that are compiled by Red Hat.
1.2. RPM packages
An RPM package consists of an archive of files and metadata used to install and erase these files on Red Hat Enterprise Linux (RHEL).
Specifically, the RPM package contains the following parts:
GPG signature
The GPG signature is used to verify the integrity of the package.
Header (package metadata)
The RPM package manager uses this metadata to determine package dependencies, where to install files, and other information.
Payload
The payload is a
cpioarchive that contains files to install to the system.
There are two types of RPM packages. Both types share the file format and tooling, but have different contents and serve different purposes:
Source RPM (SRPM)
An SRPM contains source code and a
specfile, which describes how to build the source code into a binary RPM. Optionally, the SRPM can contain patches to source code.Binary RPM
A binary RPM contains the binaries built from the sources and patches.
1.3. The Linux kernel RPM package overview
The kernel RPM is a meta package that does not contain any files, but rather ensures that all required subpackages are properly installed.
The following list includes required packages:
kernel-core-
Provides the binary image of the Linux kernel (
vmlinuz). kernel-modules-core- Provides the basic kernel modules to ensure core functionality. This includes the modules essential for the proper functioning of the most commonly used hardware.
kernel-modules-
Provides the remaining kernel modules that are not present in
kernel-modules-core.
The kernel-core and kernel-modules-core subpackages together can be used in virtualized and cloud environments to provide a RHEL 10 kernel with a quick boot time and a small disk size footprint. kernel-modules subpackage is usually unnecessary for such deployments.
Optional kernel packages are for example:
kernel-modules-extra- Provides kernel modules for uncommonly used kernel modules. Loading of the modules in this package is disabled by default.
kernel-debug- Provides a kernel with many debugging options enabled for kernel diagnosis, at the expense of reduced performance.
kernel-tools- Provides tools for manipulating the Linux kernel and supporting documentation.
kernel-devel-
Provides the kernel headers and makefiles that are enough to build modules against the
kernelpackage. kernel-abi-stablelists-
Provides information pertaining to the RHEL kernel ABI, including a list of kernel symbols required by external Linux kernel modules and a
dnfplugin to aid enforcement. kernel-headers- Includes the C header files that specify the interface between the Linux kernel and user-space libraries and programs. The header files define structures and constants required for building most standard programs.
kernel-uki-virtContains the Unified Kernel Image (UKI) of the RHEL kernel.
UKI combines the Linux kernel,
initramfs(initial RAM file system), and the kernel command line into a single signed binary which can be booted directly from the UEFI firmware.kernel-uki-virtcontains the required kernel modules to run in virtualized and cloud environments and can be used instead of thekernel-coresubpackage.
1.4. Displaying contents of a kernel package
To check if a kernel package provides a specific file, such as a module, query the repository. You can display the file list without downloading or installing the package.
Use the dnf utility to query the file list, for example, of the kernel-core, kernel-modules-core, or kernel-modules package. Note that the kernel package is a meta package that does not contain any files.
Procedure
List the available versions of a package:
$ dnf repoquery <package_name>Display the list of files in a package:
$ dnf repoquery -l <package_name>
1.5. Installing specific kernel versions
You can install new kernels by using the DNF package manager.
Procedure
To install a specific kernel version, enter the following command:
# dnf install kernel-<version>
1.6. Updating the kernel
You can update the kernel by using the DNF package manager.
Procedure
To update the kernel, enter the following command:
# dnf upgrade kernelThis command updates the kernel along with all dependencies to the latest available version.
Reboot your system for the changes to take effect.
See the
dnf(8)man page on your system for more information.
1.7. Setting a kernel as default
To set a specific kernel as the default, use the grubby command-line tool and GRUB configuration.
Procedure
Setting the kernel as default by using the
grubbytool.Enter the following command to set the kernel as default using the
grubbytool:# grubby --set-default $kernel_path
Setting the kernel as default by using the
versionargument.List the boot entries using the kernel keyword and then set an intended kernel as default:
# select k in /boot/vmlinuz-*; do grubby --set-default=$k; break; doneNoteTo list the boot entries using the
titleargument, enter# grubby --info=ALL | grep title.
Setting the default kernel for only the next boot.
Enter the following command to set the default kernel for only the next reboot using the
grub2-rebootcommand:# grub2-reboot <index|title|id>WarningSet the default kernel for only the next boot with care. Installing new kernel RPMs, self-built kernels, and manually adding the entries to the
/boot/loader/entries/directory might change the index values.
Chapter 2. The 64k page size kernel
kernel-64k is an additional, optional 64-bit ARM architecture kernel package that supports 64k pages. This additional kernel exists alongside the RHEL 10 for ARM kernel, which supports 4k pages.
Optimal system performance directly relates to different memory configuration requirements. These requirements are addressed by the two variants of kernel, each suitable for different workloads. RHEL 10 on 64-bit ARM hardware thus offers two MMU page sizes:
- 4k pages kernel for efficient memory usage in smaller environments,
-
kernel-64kfor workloads with large, contiguous memory working sets.
The 4k pages kernel and kernel-64k do not differ in the user experience as the user space is the same. You can choose the variant that addresses your situation the best.
- 4k pages kernel
Use 4k pages for more efficient memory usage in smaller environments, such as those in Edge and lower-cost, small cloud instances. In these environments, increasing the physical system memory amounts is not practical due to space, power, and cost constraints. Furthermore, not all 64-bit ARM architecture processors support a 64k page size.
The 4k pages kernel supports graphical installation by using Anaconda, system or cloud image-based installations, as well as advanced installations by using Kickstart.
kernel-64kThe 64k page size kernel is a useful option for large datasets on ARM platforms.
kernel-64kis suitable for memory-intensive workloads as it has significant gains in overall system performance, namely in large database, HPC, and high network performance.You must choose page size on 64-bit ARM architecture systems at the time of installation. You can install
kernel-64konly by Kickstart by adding thekernel-64kpackage to the package list in theKickstartfile.
2.1. Determining kernel page size by system architecture
You can determine the kernel page size for different system architectures.
Procedure
Identify the system architecture:
# uname -r6.12.0-55.9.1.el10_0.x86_64In this output,
x86_64indicates a 64-bit Intel or AMD architecture.Check the default page size:
# getconf PAGE_SIZE4096On x86_64 systems, the output is 4096 B, which means the default page size is 4 KB.
On ppc64le systems, the output is 65536 B, which means the default page size is 64 KB.
Chapter 3. Managing kernel modules
Kernel modules extend kernel functionality. Obtain module information and perform administrative tasks such as loading, unloading, and configuring modules at boot time.
3.1. Introduction to kernel modules
The Red Hat Enterprise Linux kernel can be extended with kernel modules, which provide optional additional pieces of functionality, without having to reboot the system. On Red Hat Enterprise Linux 10, kernel modules are extra kernel code built into compressed <replaceable>.ko.xz` object files.
- Loadable Kernel Modules (LKMs)
- LKMs can be dynamically loaded into and unloaded from the running Linux kernel. You can add device drivers or filesystem support without requiring a system reboot or recompiling the entire kernel.
The most common functionality enabled by kernel modules are:
- Device driver which adds support for new hardware
- Support for a file system such as GFS2 or NFS
- System calls
On modern systems, kernel modules are automatically loaded when needed. However, in some cases it is necessary to load or unload modules manually.
Similarly to the kernel, modules accept parameters that customize their behavior.
You can use the kernel tools to perform the following actions on modules:
- Inspect modules that are currently running.
- Inspect modules that are available to load into the kernel.
- Inspect parameters that a module accepts.
- Enable a mechanism to load and unload kernel modules into the running kernel.
3.2. Kernel module dependencies
Certain kernel modules sometimes depend on one or more other kernel modules. The /lib/modules/<KERNEL_VERSION>/modules.dep file contains a complete list of kernel module dependencies for the corresponding kernel version.
depmodThe dependency file is generated by the
depmodprogram, included in thekmodpackage. Many utilities provided bykmodconsider module dependencies when performing operations. Therefore, manual dependency-tracking is rarely necessary.WarningThe code of kernel modules executes in kernel-space in the unrestricted mode. Be cautious about the modules you are loading.
weak-modules-
In addition to
depmod, Red Hat Enterprise Linux provides theweak-modulesscript, which is a part of thekmodpackage. Theweak-modulesscript determines the modules that are kABI-compatible with installed kernels. While checking modules kernel compatibility,weak-modulesprocesses modules symbol dependencies from higher to lower release of kernel for which they were built. It processes each module independently of the kernel release.
3.3. Listing installed kernels
The grubby --info=ALL command displays an indexed list of installed kernels on BLS installs. With Boot Loader Specification (BLS), you can standardize the way of specifying boot entries. BLS is natively supported by systemd-boot and GRUB can also be configured to use BLS.
Procedure
List the installed kernels:
# grubby --info=ALL | grep titleThe list of all installed kernels is displayed:
title="Red Hat Enterprise Linux (6.12.0-55.9.1.el10_0.x86_64) 10.0" title="Red Hat Enterprise Linux (0-rescue-0d772916a9724907a5d1350bcd39ac92) 10.0"This is the list of installed kernels of grubby-8.40-17 from the GRUB menu.
3.4. Listing currently loaded kernel modules
Use the lsmod command to list currently loaded kernel modules.
Prerequisites
-
The
kmodpackage is installed.
Procedure
List all currently loaded kernel modules:
$ lsmodModule Size Used by fuse 126976 3 uinput 20480 1 xt_CHECKSUM 16384 1 ipt_MASQUERADE 16384 1 xt_conntrack 16384 1 ipt_REJECT 16384 1 nft_counter 16384 16 nf_nat_tftp 16384 0 nf_conntrack_tftp 16384 1 nf_nat_tftp tun 49152 1 bridge 192512 0 stp 16384 1 bridge llc 16384 2 bridge,stp nf_tables_set 32768 5 nft_fib_inet 16384 1 ...In this example:
-
The
Modulecolumn provides the names of currently loaded modules. -
The
Sizecolumn displays the amount of memory per module in KB. -
The
Used bycolumn shows the number, and optionally the names of modules that are dependent on a particular module.
-
The
3.5. Displaying information about kernel modules
You can use the modinfo command to display detailed information about the specified kernel module.
Prerequisites
-
The
kmodpackage is installed.
Procedure
Display information about any kernel module:
$ modinfo <pass:quotes[KERNEL_MODULE_NAME]>For example:
$ modinfo virtio_netfilename: /lib/modules/6.12.0-55.9.1.el10_0.x86_64/kernel/drivers/net/virtio_net.ko.xz license: GPL description: Virtio network driver rhelversion: 9.0 srcversion: 8809CDDBE7202A1B00B9F1C alias: virtio:d00000001v* depends: net_failover retpoline: Y intree: Y name: virtio_net vermagic: 6.12.0-55.9.1.el10_0.x86_64 SMP mod_unload modversions ... parm: napi_weight:int parm: csum:bool parm: gso:bool parm: napi_tx:boolYou can query information about all available modules, regardless of whether they are loaded. The
parmentries show parameters the user is able to set for the module, and what type of value they expect.NoteWhen entering the name of a kernel module, do not append the
.ko.xzextension to the end of the name. Kernel module names do not have extensions. However, their corresponding files do.
3.6. Loading kernel modules at system runtime
The optimal way to expand the functionality of the Linux kernel is by loading kernel modules. Use the modprobe command to find and load a kernel module into the currently running kernel.
The changes described in this procedure will not persist after rebooting the system. For information about how to load kernel modules to persist across system reboots, see Loading kernel modules automatically at system boot time.
Prerequisites
- You have root permissions on the system.
-
The
kmodpackage is installed. - The corresponding kernel module is not loaded. To ensure this, list the Listing currently loaded kernel modules.
Procedure
Select a kernel module you want to load.
The modules are located in the
/lib/modules/$(uname -r)/kernel/<SUBSYSTEM>/directory.Load the relevant kernel module:
# modprobe <pass:quotes[MODULE_NAME]>NoteWhen entering the name of a kernel module, do not append the
.ko.xzextension to the end of the name. Kernel module names do not have extensions; their corresponding files do.
Verification
Optionally, verify the relevant module is loaded:
$ lsmod | grep <pass:quotes[MODULE_NAME]>If the module is loaded correctly, you can display it:
$ lsmod | grep serio_rawserio_raw 16384 0See the
modprobe(8)man page on your system for more information.
3.7. Unloading kernel modules at system runtime
You can use the modprobe command to find and unload a kernel module at system runtime from the currently loaded kernel.
You must not unload the kernel modules that are active in the running system. This can lead to an unstable or non-operational system.
Unloading inactive kernel modules will not disable modules configured for automatic loading at boot. These modules will be automatically loaded again when the system restarts. For information about how to prevent this outcome, see Preventing kernel modules from being automatically loaded at system boot time.
Prerequisites
- You have root permissions on the system.
-
The
kmodpackage is installed.
Procedure
List all the loaded kernel modules:
# lsmodSelect the kernel module to unload.
If a kernel module has dependencies, unload those before unloading the kernel module. For details on identifying modules with dependencies, see Listing currently loaded kernel modules and Kernel module dependencies.
Unload the relevant kernel module:
# modprobe -r <pass:quotes[MODULE_NAME]>When entering the name of a kernel module, do not append the
.ko.xzextension to the end of the name. Kernel module names do not have extensions; their corresponding files do.
Verification
Optionally, verify the relevant module is unloaded:
$ lsmod | grep <pass:quotes[MODULE_NAME]>If the module is unloaded successfully, this command does not display any output.
See the
modprobe(8)man page on your system for more information.
3.8. Unloading kernel modules at early stages of the boot process
To temporarily block a kernel module from loading early in the boot process, use the boot loader. This is useful when a module causes the system to become unresponsive before you can permanently disable it.
You can edit the relevant boot loader entry to unload the required kernel module before the booting sequence continues.
The changes described in this procedure do not persist across system reboots. For information about how to add a kernel module to a denylist, see Preventing kernel modules from being automatically loaded at system boot time.
Prerequisites
- You have a loadable kernel module that you want to prevent from loading.
Procedure
- Boot the system into the boot loader.
- Use the cursor keys to highlight the relevant boot loader entry.
- Press the e key to edit the entry.
- Use the cursor keys to navigate to the line that starts with linux.
Append
modprobe.blacklist=module_nameto the end of the line.The
serio_rawkernel module illustrates a rogue module to be unloaded early in the boot process.- Press Ctrl+X to boot using the modified configuration.
Verification
After the system boots, verify that the relevant kernel module is not loaded:
# lsmod | grep serio_raw
3.9. Loading kernel modules automatically at system boot time
You can configure a kernel module to load automatically during the boot process.
Prerequisites
- Root permissions
-
The
kmodpackage is installed.
Procedure
Select a kernel module you want to load during the boot process.
The modules are located in the
/lib/modules/$(uname -r)/kernel/<SUBSYSTEM>/directory.Create a configuration file for the module:
# echo <MODULE_NAME> > /etc/modules-load.d/<MODULE_NAME>.confNoteWhen entering the name of a kernel module, do not append the
.ko.xzextension to the end of the name. Kernel module names do not have extensions; their corresponding files do.
Verification
After reboot, verify the relevant module is loaded:
$ lsmod | grep <MODULE_NAME>ImportantThe changes described in this procedure will persist after rebooting the system.
See the
modules-load.d(5)man page on your system for more information.
3.10. Preventing kernel modules from being automatically loaded at system boot time
Prevent the system from loading a kernel module automatically during the boot process by listing the module in the modprobe configuration file with a corresponding command.
Prerequisites
-
The commands in this procedure require root privileges. Either use
su -to switch to the root user or preface the commands withsudo. -
The
kmodpackage is installed. - Ensure that your current system configuration does not require a kernel module you plan to deny.
Procedure
List modules loaded to the currently running kernel by using the
lsmodcommand:$ lsmodModule Size Used by tls 131072 0 uinput 20480 1 snd_seq_dummy 16384 0 snd_hrtimer 16384 1 …In the output, identify the module you want to prevent from getting loaded.
Alternatively, identify an unloaded kernel module you want to prevent from potentially loading in the
/lib/modules/<KERNEL-VERSION>/kernel/<SUBSYSTEM>/directory, for example:$ ls /lib/modules/6.12.0-55.9.1.el10_0.x86_64/kernel/crypto/ansi_cprng.ko.xz chacha20poly1305.ko.xz md4.ko.xz serpent_generic.ko.xz anubis.ko.xz cmac.ko.xz…
Create a configuration file serving as a denylist:
# touch /etc/modprobe.d/denylist.confIn a text editor of your choice, combine the names of modules you want to exclude from automatic loading to the kernel with the
blacklistconfiguration command, for example:# Prevents <KERNEL-MODULE-1> from being loaded blacklist <MODULE-NAME-1> install <MODULE-NAME-1> /bin/false # Prevents <KERNEL-MODULE-2> from being loaded blacklist <MODULE-NAME-2> install <MODULE-NAME-2> /bin/false …Because the
blacklistcommand does not prevent the module from getting loaded as a dependency for another kernel module that is not in a denylist, you must also define theinstallline. In this case, the system runs/bin/falseinstead of installing the module. The lines starting with a hash sign are comments you can use to make the file more readable.NoteWhen entering the name of a kernel module, do not append the
.ko.xzextension to the end of the name. Kernel module names do not have extensions; their corresponding files do.Create a backup copy of the current initial RAM disk image before rebuilding:
# cp /boot/initramfs-$(uname -r).img /boot/initramfs-$(uname -r).bak.$(date +%m-%d-%H%M%S).imgAlternatively, create a backup copy of an initial RAM disk image which corresponds to the kernel version for which you want to prevent kernel modules from automatic loading:
# cp /boot/initramfs-<VERSION>.img /boot/initramfs-<VERSION>.img.bak.$(date +%m-%d-%H%M%S)
Generate a new initial RAM disk image to apply the changes:
# dracut -f -vIf you build an initial RAM disk image for a different kernel version than your system currently uses, specify both target
initramfsand kernel version:# dracut -f -v /boot/initramfs-<TARGET-VERSION>.img <CORRESPONDING-TARGET-KERNEL-VERSION>
Restart the system:
$ rebootImportantThe changes described in this procedure will take effect and persist after rebooting the system. If you incorrectly list a key kernel module in the denylist, you can switch the system to an unstable or non-operational state.
3.11. Compiling custom kernel modules
Build a sample kernel module as requested by various configurations at hardware and software level.
Prerequisites
You installed the
kernel-devel,gcc, andelfutils-libelf-develpackages.# dnf install kernel-devel-$(uname -r) gcc elfutils-libelf-devel- You have root permissions.
-
You created the
/root/testmodule/directory where you compile the custom kernel module.
Procedure
Create the
/root/testmodule/test.cfile with the following content.#include <linux/module.h> #include <linux/kernel.h> int init_module(void) { printk("Hello World\n This is a test\n"); return 0; } void cleanup_module(void) { printk("Good Bye World"); } MODULE_LICENSE("GPL");The
test.cfile is a source file that provides the main functionality to the kernel module. The file has been created in a dedicated/root/testmodule/directory for organizational purposes. After the module compilation, the/root/testmodule/directory will contain multiple files.The
test.cfile includes from the system libraries:-
The
linux/kernel.hheader file is necessary for theprintk()function in the example code. -
The
linux/module.hfile contains function declarations and macro definitions that are shared across several source files written in C programming language.
-
The
-
Follow the
init_module()andcleanup_module()functions to start and end the kernel logging functionprintk(), which prints text. Create the
/root/testmodule/Makefilefile with the following content.obj-m := test.oThe Makefile contains instructions for the compiler to produce an object file named
test.o. Theobj-mdirective specifies that the resultingtest.kofile is going to be compiled as a loadable kernel module. Alternatively, theobj-ydirective can instruct to buildtest.koas a built-in kernel module.Compile the kernel module:
# make -C /lib/modules/$(uname -r)/build M=/root/testmodule modulesmake: Entering directory '/usr/src/kernels/6.12.0-55.9.1.el10_0.x86_64' CC [M] /root/testmodule/test.o MODPOST /root/testmodule/Module.symvers CC [M] /root/testmodule/test.mod.o LD [M] /root/testmodule/test.ko BTF [M] /root/testmodule/test.ko Skipping BTF generation for /root/testmodule/test.ko due to unavailability of vmlinux make: Leaving directory '/usr/src/kernels/6.12.0-55.9.1.el10_0.x86_64'The compiler creates an object file (
test.o) for each source file (test.c) as an intermediate step before linking them together into the final kernel module (test.ko).After a successful compilation,
/root/testmodule/contains additional files that relate to the compiled custom kernel module. The compiled module itself is represented by thetest.kofile.
Verification
Optional: check the contents of the
/root/testmodule/directory:# ls -l /root/testmodule/total 152 -rw-r--r--. 1 root root 16 Jul 26 08:19 Makefile -rw-r--r--. 1 root root 25 Jul 26 08:20 modules.order -rw-r--r--. 1 root root 0 Jul 26 08:20 Module.symvers -rw-r--r--. 1 root root 224 Jul 26 08:18 test.c -rw-r--r--. 1 root root 62176 Jul 26 08:20 test.ko -rw-r--r--. 1 root root 25 Jul 26 08:20 test.mod -rw-r--r--. 1 root root 849 Jul 26 08:20 test.mod.c -rw-r--r--. 1 root root 50936 Jul 26 08:20 test.mod.o -rw-r--r--. 1 root root 12912 Jul 26 08:20 test.oCopy the kernel module to the
/lib/modules/$(uname -r)/directory:# cp /root/testmodule/test.ko /lib/modules/$(uname -r)/Update the modular dependency list:
# depmod -aLoad the kernel module:
# modprobe -v testinsmod /lib/modules/6.12.0-55.9.1.el10_0.x86_64/test.koVerify that the kernel module was successfully loaded:
# lsmod | grep testtest 16384 0Read the latest messages from the kernel ring buffer:
# dmesg[74422.545004] Hello World This is a test
Chapter 4. Configuring kernel command-line parameters
Use kernel command-line parameters to change the behavior of certain aspects of the Red Hat Enterprise Linux kernel at boot time. System administrators control which options are set at boot. Note that certain kernel behaviors can only be set at boot time.
Changing the behavior of the system by modifying kernel command-line parameters can have negative effects on your system. Always test changes before deploying them in production. For further guidance, contact Red Hat Support.
4.1. What are kernel command-line parameters
With kernel command-line parameters, you can overwrite default values and set specific hardware settings. At boot time, you can configure the Red Hat Enterprise Linux kernel, the initial RAM disk, and user space features.
By default, the kernel command-line parameters for systems by using the GRUB boot loader are defined in the boot entry configuration file for each kernel boot entry.
You can manipulate boot loader configuration files by using the grubby utility. With grubby, you can perform these actions:
- Change the default boot entry.
- Add or remove arguments from a GRUB menu entry.
4.2. Understanding boot entries
Understand boot entries to manage your system’s kernel configurations.
A boot entry is a collection of options stored in a configuration file and tied to a particular kernel version. In practice, you have at least as many boot entries as your system has installed kernels. The boot entry configuration file is located in the /boot/loader/entries/ directory:
d8712ab6d4f14683c5625e87b52b6b6e-6.12.0.el10_0.x86_64.conf
The file name consists of a machine ID stored in the /etc/machine-id file, and a kernel version.
The boot entry configuration file contains information about the kernel version, the initial ramdisk image, and the kernel command-line parameters. The example contents of a boot entry config can be seen below:
title Red Hat Enterprise Linux (6.12.0-0.el10_0.x86_64) 10.0
version 6.12.0-0.el10_0.x86_64
linux /vmlinuz-6.12.0-0.el10_0.x86_64
initrd /initramfs-6.12.0-0.el10_0.x86_64.img
options root=/dev/mapper/rhel_kvm--02--guest08-root ro crashkernel=2G-64G:256M,64G-:512M resume=/dev/mapper/rhel_kvm--02--guest08-swap rd.lvm.lv=rhel_kvm-02-guest08/root rd.lvm.lv=rhel_kvm-02-guest08/swap console=ttyS0,115200
grub_users $grub_users
grub_arg --unrestricted
grub_class kernel4.3. Changing kernel command-line parameters for all boot entries
Change kernel command-line parameters for all boot entries on your system.
When installing a newer version of the kernel in Red Hat Enterprise Linux 10 systems, the grubby tool passes the kernel command-line arguments from the previous kernel version.
Prerequisites
-
grubbyutility is installed on your system. -
ziplutility is installed on your IBM Z system.
Procedure
To add a parameter:
# grubby --update-kernel=ALL --args="<NEW_PARAMETER>"For systems that use the GRUB boot loader and, on IBM Z that use the zIPL boot loader, the command adds a new kernel parameter to each
/boot/loader/entries/<ENTRY>.conffile.On IBM Z, update the boot menu:
# zipl
To remove a parameter:
# grubby --update-kernel=ALL --remove-args="<PARAMETER_TO_REMOVE>"On IBM Z, update the boot menu:
# ziplNoteThere is no need to update boot menu for the systems using the GRUB boot loader.
4.4. Changing kernel command-line parameters for a single boot entry
Make changes in kernel command-line parameters for a single boot entry on your system.
Prerequisites
-
grubbyandziplutilities are installed on your system.
Procedure
To add a parameter:
# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="<NEW_PARAMETER>"On IBM Z, update the boot menu:
# grubby --args="<NEW_PARAMETER> --update-kernel=ALL --zipl
To remove a parameter:
# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --remove-args="<PARAMETER_TO_REMOVE>"On IBM Z, update the boot menu:
# grubby --args="<NEW_PARAMETER> --update-kernel=ALL --ziplImportantgrubbymodifies and stores the kernel command-line parameters of an individual kernel boot entry in the/boot/loader/entries/<ENTRY>.conffile.
4.5. Changing kernel command-line parameters temporarily at boot time
Make temporary changes to a Kernel Menu Entry by changing the kernel parameters only during a single boot process. This procedure applies only for a single boot and does not persist after system reboot.
Procedure
- Boot into the GRUB boot menu.
- Select the kernel you want to start.
- Press the e key to edit the kernel parameters.
- Find the kernel command line by moving the cursor down.
- Move the cursor to the end of the line.
Edit the kernel parameters as required. For example, to run the system in emergency mode, add the
emergencyparameter at the end of thelinuxline:linux ($root)/vmlinuz-6.12.0-0.el10_0.x86_64 root=/dev/mapper/rhel-root ro crashkernel=2G-64G:256M,64G-:512M resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap rhgb quiet emergencyTo enable the system messages, remove the
rhgbandquietparameters.Press Ctrl+x to boot with the selected kernel and the modified command line parameters.
ImportantIf you press the Esc key to leave command line editing, it will drop all the user made changes.
4.6. Configuring GRUB settings to enable serial console connection
To connect to a headless server or embedded system when the network is down, you can configure GRUB 2 to enable a serial console connection. This also provides login access on a different system to avoid security rules.
You need to configure some default GRUB settings to use the serial console connection.
Prerequisites
- You have root permissions on the system.
Procedure
Add the following two lines to the
/etc/default/grubfile:GRUB_TERMINAL="serial" GRUB_SERIAL_COMMAND="serial --speed=9600 --unit=0 --word=8 --parity=no --stop=1"The first line disables the graphical terminal. The
GRUB_TERMINALkey overrides values ofGRUB_TERMINAL_INPUTandGRUB_TERMINAL_OUTPUTkeys.The second line adjusts the baud rate (
--speed), parity and other values to fit your environment and hardware. Note that a higher baud rate, for example 115200, is preferable for tasks such as following log files.Update the GRUB configuration file:
# grub2-mkconfig -o /boot/grub2/grub.cfgThis applies to both, BIOS and UEFI based machines.
- Reboot the system for the changes to take effect.
4.7. Changing boot entries with the GRUB configuration file
To change boot entries for the Linux kernel, you can modify the /etc/default/grub configuration file. This file contains the GRUB_CMDLINE_LINUX key, which lists the kernel command-line arguments.
For example:
GRUB_CMDLINE_LINUX="crashkernel=2G-64G:256M,64G-:512M resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap"
To change the boot entries, overwrite Boot Loader Specification (BLS) snippets with the contents of the GRUB_CMDLINE_LINUX values.
Prerequisites
- A fresh Red Hat Enterprise Linux 10 installation.
Procedure
Add or remove a kernel parameter for individual kernels in a post installation script with
grubby:# grubby --update-kernel <PATH_TO_KERNEL> --args "<NEW_ARGUMENTS>"For example, add the
noapicparameter to the chosen kernel:# grubby --update-kernel /boot/vmlinuz-6.12.0-0.el10_0.x86_64 --args "noapic"The parameter is propagated into the BLS snippets, but not into the
/etc/default/grubfile.Overwrite BLS snippets with the contents of the
GRUB_CMDLINE_LINUXvalues present in the/etc/default/grubfile:# grub2-mkconfig -o /boot/grub2/grub.cfg --update-bls-cmdlineGenerating grub configuration file ... Adding boot menu entry for UEFI Firmware Settings ... doneNoteOther changes, such as changes made to
GRUB_TIMEOUTkey (also included in the/etc/default/grubGRUB configuration file) are propagated to the newgrub.cfgfile by executinggrub2-mkconfigcommand.
Verification
- Reboot your system.
Verify that the parameters are included in the
/proc/cmdlinefile.For example, if you added the
noapic:BOOT_IMAGE=(hd0,gpt2)/vmlinuz-6.12.0-0.el10_0.x86_64 root=/dev/mapper/RHELCSB-Root ro vconsole.keymap=us crashkernel=2G-64G:256M,64G-:512M rd.lvm.lv=RHELCSB/Root rd.luks.uuid=luks-d8a28c4c-96aa-4319-be26-96896272151d rhgb quiet noapic rd.luks.key=d8a28c4c-96aa-4319-be26-96896272151d=/keyfile:UUID=c47d962e-4be8-41d6-8216-8cf7a0d3b911 ipv6.disable=1
Chapter 5. Configuring kernel parameters at runtime
Modify the behavior of the Red Hat Enterprise Linux kernel at runtime by using the sysctl command and by modifying configuration files in the /etc/sysctl.d/ and /proc/sys/ directories.
Configuring kernel parameters on a production system requires careful planning. Unplanned changes can render the kernel unstable, requiring a system reboot. Verify that you are using valid options before changing any kernel values.
5.1. What are kernel parameters
Kernel parameters are tunable values that you can adjust while the system is running. Note that for changes to take effect, you do not need to reboot the system or recompile the kernel.
The difference between kernel parameters and kernel command line parameters is; Kernel parameters can configure the Linux kernel with all the options, while kernel command line parameters are the specific arguments passed to the kernel during boot, allowing runtime configuration without kernel recompilation.
It is possible to address the kernel parameters through:
-
The
sysctlcommand -
The virtual file system mounted at the
/proc/sys/directory -
The configuration files in the
/etc/sysctl.d/directory
Tunables are divided into classes by the kernel subsystem. Red Hat Enterprise Linux has the following tunable classes:
| Tunable class | Subsystem |
|---|---|
|
| Execution domains and personalities |
|
| Cryptographic interfaces |
|
| Kernel debugging interfaces |
|
| Device-specific information |
|
| Global and specific file system tunables |
|
| Global kernel tunables |
|
| Network tunables |
|
| Sun Remote Procedure Call (NFS) |
|
| User Namespace limits |
|
| Tuning and management of memory, buffers, and cache |
5.2. Configuring kernel parameters temporarily with sysctl
You can use the sysctl command to temporarily set kernel parameters at runtime. The command is also useful for listing and filtering tunables.
Prerequisites
- You have root permissions on the system.
Procedure
List all parameters and their values.
# sysctl -aNoteThe
sysctl -acommand displays kernel parameters, which can be adjusted at runtime and at boot time.To configure a parameter temporarily, enter:
# sysctl <TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE>This sample changes the parameter value while the system is running. The changes take effect immediately and it does not require system reboot.
NoteThe changes return back to default after your system reboots.
5.3. Configuring kernel parameters permanently with sysctl
You can use the sysctl command to permanently set kernel parameters.
Prerequisites
- You have root permissions on the system.
Procedure
List all parameters:
# sysctl -aThe command displays all kernel parameters that can be configured at runtime.
Configure a parameter permanently:
# sysctl -w <TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE> >> /etc/sysctl.confThe sample command changes the tunable value and writes it to the
/etc/sysctl.conffile, which overrides the default values of kernel parameters. The changes take effect immediately and persistently, without a need for restart.NoteTo permanently modify kernel parameters, you can also make manual changes to the configuration files in the
/etc/sysctl.d/directory.
5.4. Using configuration files in /etc/sysctl.d/ to adjust kernel parameters
To permanently set kernel parameters, manually modify the configuration files in the /etc/sysctl.d/ directory.
Prerequisites
- You have root permissions on the system.
Procedure
Create a new configuration file in
/etc/sysctl.d/:# vim /etc/sysctl.d/<some_file.conf>Include kernel parameters, one per line:
<TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE> <TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE>- Save the configuration file.
Reboot the machine for the changes to take effect.
Alternatively, apply changes without rebooting:
# sysctl -p /etc/sysctl.d/<some_file.conf>With this command, you can read values from the configuration file which you created earlier.
See
sysctl(8)andsysctl.d(5)man pages on your system for more information.
5.5. Configuring kernel parameters temporarily through /proc/sys/
To set kernel parameters temporarily, modify the files in the /proc/sys/ virtual file system directory.
Prerequisites
- You have root permissions on the system.
Procedure
Identify a kernel parameter you want to configure:
# ls -l /proc/sys/<TUNABLE_CLASS>/The writable files returned by the command can be used to configure the kernel. The files with read-only permissions provide feedback on the current settings.
Assign a target value to the kernel parameter:
# echo <TARGET_VALUE> > /proc/sys/<TUNABLE_CLASS>/<PARAMETER>The configuration changes applied by using a command are not permanent and will disappear after system reboot.
Verification
Verify the value of the newly set kernel parameter:
# cat /proc/sys/<TUNABLE_CLASS>/<PARAMETER>
Chapter 6. Configuring kernel parameters permanently by using RHEL system roles
You can use the kernel_settings RHEL system role to configure kernel parameters on multiple clients at once.
Simultaneous configuration has the following advantages:
- Provides a friendly interface with efficient input setting.
- Keeps all intended kernel parameters in one place.
After you run the kernel_settings role from the control machine, the kernel parameters are applied to the managed systems immediately and persist across reboots.
Note that RHEL system roles delivered over RHEL channels are available to RHEL customers as an RPM package in the default AppStream repository. RHEL system roles are also available as a collection to customers with Ansible subscriptions over Ansible Automation Hub.
6.1. Applying selected kernel parameters by using the kernel_settings RHEL system role
You can use the kernel_settings RHEL system role to remotely configure various kernel parameters across multiple managed operating systems with persistent effects.
For example, by using the kernel_settings role, you can configure:
- Transparent hugepages to increase performance by reducing the overhead of managing smaller pages.
- The largest packet sizes are to be transmitted over the network with the loopback interface.
- Limits on files, which can be opened simultaneously.
Prerequisites
- You have prepared the control node and the managed nodes.
- You are logged in to the control node as a user who can run playbooks on the managed nodes.
-
The account you use to connect to the managed nodes has
sudopermissions for these nodes.
Procedure
Create a playbook file, for example,
~/playbook.yml, with the following content:--- - name: Configuring kernel settings hosts: managed-node-01.example.com tasks: - name: Configure hugepages, packet size for loopback device, and limits on simultaneously open files. ansible.builtin.include_role: name: redhat.rhel_system_roles.kernel_settings vars: kernel_settings_sysctl: - name: fs.file-max value: 400000 - name: kernel.threads-max value: 65536 kernel_settings_sysfs: - name: /sys/class/net/lo/mtu value: 65000 kernel_settings_transparent_hugepages: madvise kernel_settings_reboot_ok: trueThe settings specified in the example playbook include the following:
kernel_settings_sysfs: <list_of_sysctl_settings>-
A YAML list of
sysctlsettings and the values you want to assign to these settings. kernel_settings_transparent_hugepages: <value>-
Controls the memory subsystem Transparent Huge Pages (THP) setting. You can disable THP support (
never), enable it system wide (always) or insideMAD_HUGEPAGEregions (madvise). kernel_settings_reboot_ok: <true|false>The default is
false. If set totrue, the system role will determine if a reboot of the managed host is necessary for the requested changes to take effect and reboot it. If set tofalse, the role will return the variablekernel_settings_reboot_requiredwith a value oftrue, indicating that a reboot is required. In this case, a user must reboot the managed node manually.For details about all variables used in the playbook, see the
/usr/share/ansible/roles/rhel-system-roles.kdump/README.mdfile on the control node.
Validate the playbook syntax:
$ ansible-playbook --syntax-check ~/playbook.ymlNote that this command only validates the syntax and does not protect against a wrong but valid configuration.
Run the playbook:
$ ansible-playbook ~/playbook.yml
Verification
Verify the affected kernel parameters:
# ansible managed-node-01.example.com -m command -a 'sysctl fs.file-max kernel.threads-max net.ipv6.conf.lo.mtu' # ansible managed-node-01.example.com -m command -a 'cat /sys/kernel/mm/transparent_hugepage/enabled'
Chapter 7. Managing kernel command-line parameters with UKI
Unified Kernel Image (UKI) combines the kernel, initial RAM disk (initrd), and boot command line into a single executable binary.
7.1. Understanding kernel command-line parameters with UKI
With Unified Kernel Image (UKI), systemd-boot, specifically systemd-stub, handles the kernel command-line parameters. The UKI delivered by Red Hat includes the basic kernel command-line parameter console=tty0 console=ttyS0.
You can add additional kernel command-line parameters by using UKI add-ons. Alternatively, you can generate your own UKI to contain any arguments you require.
Secure Boot revokes improperly signed UKIs and add-ons. These signatures can also alter Platform Configuration Register (PCR) measurements in the Trusted Platform Module (TPM), which can potentially affect boot sequence.
7.2. Understanding boot entries
You manage boot entries directly in UEFI NVRAM. This means they are no longer stored on disk. You can use tools such as kernel-bootcfg or efibootmgr to alter boot entries directly.
The following is an example of a boot entry:
Boot0001* redhat HD(1,GPT,9192a707-8768-4c9f-bb11-fdd7c7e307e7,0x800,0x100000)/\EFI\redhat\shimx64.efi\EFI\Linux\ffffffffffffffffffffffffffffffff-6.12.0-174.el10.x86_64.efi7.3. Acquire UKI add-ons to add kernel command-line parameters
To add kernel command-line parameters, you can acquire officially signed add-ons delivered by Red Hat in the kernel-uki-virt-addons packages. These add-ons are signed by the same certificates as their associated UKIs. The default installation path is /lib/modules/$(uname -r)/vmlinuz-virt.efi.extra.d/.
You must copy these add-ons to the appropriate locations for them to take effect.
If you need add-ons other than these or prefer signing them on your own, you can create them with tools such as systemd-ukify or dracut.
Procedure
Create a new add-on:
# ukify build --cmdline "emergency" --output emergency.unsigned.addon.efi
7.4. Changing kernel command-line parameters for all boot entries
To change kernel command-line parameters for all boot entries, add the UKI add-ons to the global add-ons directory /boot/efi/loader/addons/.
Prerequisites
- You have root permissions on the system.
-
You have
.addon.efifile.
Procedure
Copy the add-on file to the
/boot/efi/loader/addons/directory:# cp <my-addon>.addon.efi /boot/efi/loader/addons/Reboot the system:
# reboot
Verification
Verify the new parameter depends on the type of the added add-on. For example, check the kernel command line:
# cat /proc/cmdline
7.5. Changing kernel command-line parameters for a single UKI
To change kernel command-line parameters for a single UKI, manage the add-ons on a per-UKI basis. The revocation mechanism applies to UKI and its associated add-ons locally.
By default, UKIs are located at the following path:
/boot/efi/EFI/Linux/<machine_id>-<kernel_version>.efi
The effective add-ons designated to this UKI are located at the following path:
/boot/efi/EFI/Linux/<machine_id>-<kernel_version>.efi.extra.d/
Prerequisites
- You have root permissions on the system.
-
You have
.addon.efifile.
Procedure
Identify the running kernel version and machine ID:
# uname -r # cat /etc/machine-idCopy the add-on file to the specific directory associated with the UKI:
# cp <my-addon>.addon.efi /boot/efi/EFI/Linux/<machine_id>-<kernel_version>.efi.extra.d/Reboot the system:
# reboot
Verification
Verify the new parameter depends on the type of the added add-on. For example, check the kernel command line:
# cat /proc/cmdline
When you update the kernel-uki-virt package, the system installs a new UKI version. The update also copies the currently effective add-ons to the directory for the new UKI, provided that the kernel-uki-virt-addons package is installed at the same time. This happens automatically, for example, when you run dnf update.
7.6. Creating UKI to contain customized kernel command-line parameters
To customize the Linux kernel, initial RAM disk, or initrd, and kernel command-line parameters, you can create your own UKI by using tools such as systemd-ukify or dracut.
Procedure
For example, to create a custom UKI by using
systemd-ukify:# ukify build --initrd /boot/initramfs-$(uname -r).img --linux /lib/modules/$(uname -r)/vmlinuz --uname $(uname -r) --cmdline "console=tty0 console=ttyS0 emergency" --output uki.unsigned.efi
Chapter 8. Configuring the GRUB 2 boot loader by using RHEL system roles
By using the bootloader RHEL system role, you can automate the configuration and management tasks related to the GRUB2 boot loader.
This role currently supports configuring the GRUB2 boot loader, which runs on the following CPU architectures:
- AMD and Intel 64-bit architectures (x86-64)
- The 64-bit ARM architecture (ARMv8.0)
- IBM Power Systems, Little Endian (POWER9)
8.1. Updating the existing boot loader entries by using the bootloader RHEL system role
You can use the bootloader RHEL system role to update the existing entries in the GRUB2 boot menu in an automated fashion. This way you can efficiently pass specific kernel command-line parameters that can optimize the performance or behavior of your systems.
For example, if you leverage systems, where detailed boot messages from the kernel and init system are not necessary, use bootloader to apply the quiet parameter to your existing boot loader entries on your managed nodes to achieve a cleaner, less cluttered, and more user-friendly booting experience.
Prerequisites
- You have prepared the control node and the managed nodes.
- You are logged in to the control node as a user who can run playbooks on the managed nodes.
-
The account you use to connect to the managed nodes has
sudopermissions for these nodes. - You identified the kernel that corresponds to the boot loader entry you want to update.
Procedure
Create a playbook file, for example,
~/playbook.yml, with the following content:--- - name: Configuration and management of GRUB2 boot loader hosts: managed-node-01.example.com tasks: - name: Update existing boot loader entries ansible.builtin.include_role: name: redhat.rhel_system_roles.bootloader vars: bootloader_settings: - kernel: path: /boot/vmlinuz-6.12.0-0.el10_0.aarch64 options: - name: quiet state: present bootloader_reboot_ok: trueThe settings specified in the example playbook include the following:
kernel- Specifies the kernel connected with the boot loader entry that you want to update.
options- Specifies the kernel command-line parameters to update for your chosen boot loader entry (kernel).
bootloader_reboot_ok: true- The role detects that a reboot is needed for the changes to take effect and performs a restart of the managed node.
For details about all variables used in the playbook, see the
/usr/share/ansible/roles/rhel-system-roles.bootloader/README.mdfile on the control node.Validate the playbook syntax:
$ ansible-playbook --syntax-check ~/playbook.ymlNote that this command only validates the syntax and does not protect against a wrong but valid configuration.
Run the playbook:
$ ansible-playbook ~/playbook.yml
Verification
Check that your specified boot loader entry has updated kernel command-line parameters:
# ansible managed-node-01.example.com -m ansible.builtin.command -a 'grubby --info=ALL' managed-node-01.example.com | CHANGED | rc=0 >> ... index=1 kernel="/boot/vmlinuz-6.12.0-0.el10_0.aarch64" args="ro crashkernel=2G-4G:256M,4G-64G:320M,64G-:576M rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap $tuned_params quiet" root="/dev/mapper/rhel-root" initrd="/boot/initramfs-6.12.0-0.el10_0.aarch64.img $tuned_initrd" title="Red Hat Enterprise Linux (6.12.0-0.el10_0.aarch64) 10" id="2c9ec787230141a9b087f774955795ab-6.12.0-0.el10_0.aarch64" ...
8.4. Collecting the boot loader configuration information by using the bootloader RHEL system role
You can use the bootloader RHEL system role to gather information about the GRUB2 boot loader entries in an automated fashion. This way you can quickly identify that your systems are set up to boot correctly, all entries point to the right kernels and initial RAM disk images.
As a result, you can for example:
- Prevent boot failures.
- Revert to a known good state when troubleshooting.
- Be sure that security-related kernel command-line parameters are correctly configured.
Prerequisites
- You have prepared the control node and the managed nodes.
- You are logged in to the control node as a user who can run playbooks on the managed nodes.
-
The account you use to connect to the managed nodes has
sudopermissions for these nodes.
Procedure
Create a playbook file, for example,
~/playbook.yml, with the following content:--- - name: Configuration and management of GRUB2 boot loader hosts: managed-node-01.example.com tasks: - name: Gather information about the boot loader configuration ansible.builtin.include_role: name: redhat.rhel_system_roles.bootloader vars: bootloader_gather_facts: true - name: Display the collected boot loader configuration information debug: var: bootloader_factsFor details about all variables used in the playbook, see the
/usr/share/ansible/roles/rhel-system-roles.bootloader/README.mdfile on the control node.Validate the playbook syntax:
$ ansible-playbook --syntax-check ~/playbook.ymlNote that this command only validates the syntax and does not protect against a wrong but valid configuration.
Run the playbook:
$ ansible-playbook ~/playbook.yml
Verification
After you run the preceding playbook on the control node, you will see a similar command-line output as in the following example:
... "bootloader_facts": [ { "args": "ro crashkernel=1G-4G:256M,4G-64G:320M,64G-:576M rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap $tuned_params quiet", "default": true, "id": "2c9ec787230141a9b087f774955795ab-6.12.el10_0.aarch64", "index": "1", "initrd": "/boot/initramfs-6.12.0.el10_0.aarch64.img $tuned_initrd", "kernel": "/boot/vmlinuz-6.12.0-0.el10_0.aarch64", "root": "/dev/mapper/rhel-root", "title": "Red Hat Enterprise Linux (6.12.0-0.el10_0.aarch64) 10" } ] ...The command-line output shows the following notable configuration information about the boot entry:
args- Command-line parameters passed to the kernel by the GRUB2 boot loader during the boot process. They configure various settings and behaviors of the kernel, initramfs, and other boot-time components.
id- Unique identifier assigned to each boot entry in a boot loader menu. It consists of machine ID and the kernel version.
root- The root filesystem for the kernel to mount and use as the primary filesystem during the boot.
Chapter 9. Applying patches with kernel live patching
The Red Hat Enterprise Linux kernel live patching solution patches a running kernel without rebooting or restarting processes. System administrators can immediately apply critical security patches, maintain system uptime, and reduce reboots. Note that not all critical or important CVEs can be addressed through live patching.
Some incompatibilities exist between kernel live patching and other kernel subcomponents. Read the Limitations of kpatch carefully before using kernel live patching.
9.1. Limitations of kpatch
Review the limitations of the kpatch feature to prevent conflicts. * By using the kpatch feature, you can apply simple security and bug fix updates that do not require an immediate system reboot.
-
You must not use the
SystemTaporkprobetool during or after loading a patch. The patch might not take effect until the probes are removed.
9.2. Support for third-party live patching
The kpatch utility is the only kernel live patching utility supported by Red Hat with the RPM modules provided by Red Hat repositories. Red Hat does not support live patches provided by a third party.
9.3. Access to kernel live patches
A kernel module (kmod) implements kernel live patching capability and is provided as an RPM package.
You are provided an access to kernel live patches, which are delivered through the standard channels. However, if you are not subscribed to an extended support offering, you lose access to new patches for the current minor release when the next minor release becomes available. For example, in the standard subscriptions, you are able to live patch RHEL 10.1 kernel until the RHEL 10.2 kernel is released. After the release of RHEL 10.2, live patches for RHEL 10.1 are not available.
The components of kernel live patching are as follows:
- Kernel patch module
- The delivery mechanism for kernel live patches.
- A kernel module built specifically for the kernel being patched.
- The patch module contains the code of the required fixes for the kernel.
-
Patch modules register with the
livepatchkernel subsystem and specify the original functions to replace, along with pointers to the replacement functions. Kernel patch modules are delivered as RPMs. -
The naming convention is
kpatch_<kernel version>_<kpatch version>_<kpatch release>. The "kernel version" part of the name has dots replaced with underscores.
- The
kpatchutility - A command-line utility for managing patch modules.
- The
kpatchservice -
A systemd service required by
multiuser.target. This target loads the kernel patch module at boot time. - The
kpatch-dnfpackage - A DNF plugin delivered in the form of an RPM package. This plugin manages automatic subscription to kernel live patches.
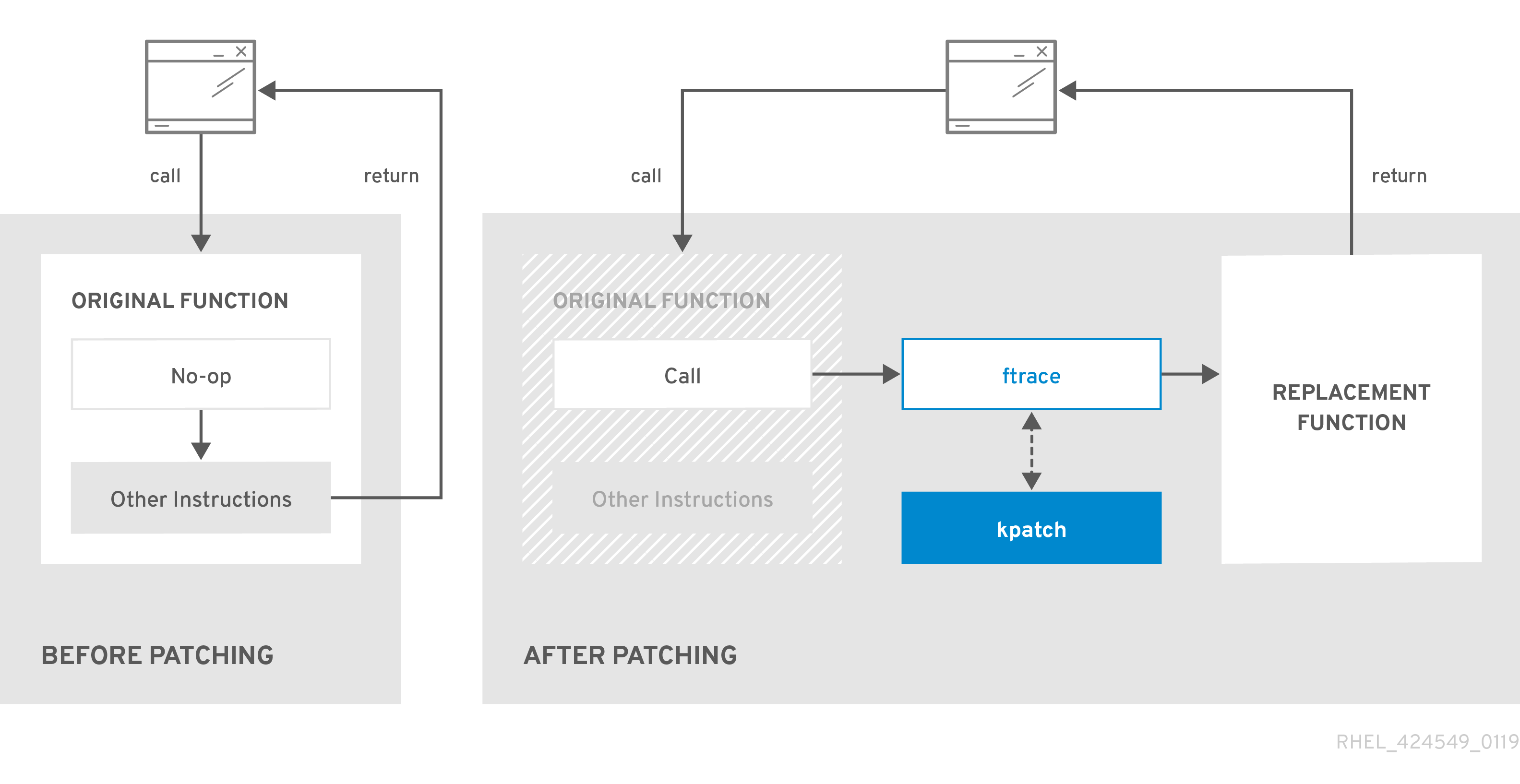
9.4. The process of live patching kernels
The kpatch kernel patching solution uses the livepatch kernel subsystem to redirect outdated functions to updated ones.
Applying a live kernel patch to a system triggers the following processes:
-
The kernel patch module is copied to the
/var/lib/kpatch/directory and registered for re-application to the kernel by systemd on next boot. -
The
kpatchmodule loads into the running kernel and the new functions are registered to theftracemechanism with a pointer to the location in memory of the new code.
When the kernel accesses the patched function, the ftrace mechanism redirects it, bypassing the original functions and leading the kernel to the patched version of the function.
Figure 9.1. How kernel live patching works
9.5. Applying patches with kernel live patching in the web console
You can configure the kpatch framework, which applies kernel security patches without forcing system restarts, in the RHEL web console.
Prerequisites
You have installed the RHEL 10 web console.
For instructions, see Installing and enabling the web console.
Procedure
- Log in to the RHEL 10 web console.
- Click Software Updates.
Check the status of your kernel patching settings.
- If the patching is not installed, click .
To enable kernel patching, click .

- Select the checkbox for applying kernel patches.
- Select whether you want to apply patches for current and future kernels or the current kernel only. If you decide to subscribe to applying patches for future kernels, the system also applies patches for the upcoming kernel releases.
- Click .
Verification
- Check that the kernel patching is now Enabled in the Settings table of the Software updates section.
9.6. Subscribing the currently installed kernels to the live patching stream
To subscribe installed kernels to the live patching stream, install the specific kernel patch module RPMs. These packages are cumulatively updated.
The following procedure explains how to subscribe to all future cumulative live patching updates for a given kernel. Because live patches are cumulative, you cannot select which individual patches are deployed for a given kernel.
Red Hat does not support any third party live patches applied to a Red Hat supported system.
Prerequisites
- You have root permissions on the system.
Procedure
Optional: Check your kernel version:
# uname -r 6.12.0-55.9.1.el10_0.x86_64Search for a live patching package that corresponds to the version of your kernel:
# dnf search $(uname -r)Install the live patching package:
# dnf install kpatchThis command installs and applies the latest cumulative live patches for that specific kernel only.
If the version of a live patching package is 1-1 or higher, the package will contain a patch module. In that case the kernel will be automatically patched during the installation of the live patching package.
The kernel patch module is also installed into the
/var/lib/kpatch/directory to be loaded by the systemd system and service manager during the future reboots.NoteAn empty live patching package will be installed when there are no live patches available for a given kernel. An empty live patching package will have a kpatch_version-kpatch_release of 0-0, for example
kpatch-patch-6_12_0-1-0-0.x86_64.rpm. The installation of the empty RPM subscribes the system to all future live patches for the given kernel.
Verification
Verify that all installed kernels have been patched:
# kpatch list Loaded patch modules: kpatch_6_12_0_1_0_1 [enabled] Installed patch modules: kpatch_6_12_0_1_0_1 (6.12.0.el10_0.x86_64) …The output shows that the kernel patch module has been loaded into the kernel that is now patched with the latest fixes from the
kpatch-patch-6_12_0-0.el10_0.x86_64.rpmpackage.See the
kpatch(1)man page on your system for more information.NoteEntering the
kpatch listcommand does not return an empty live patching package. Use therpm -qa | grep kpatchcommand instead.# rpm -qa | grep kpatch kpatch-dnf-0.4-3.el10.noarch kpatch-0.9.7-2.el10.noarch kpatch-patch-6_12_0-0.el10_0.x86_64
9.7. Automatically subscribing any future kernel to the live patching stream
To subscribe your system to fixes delivered by the kernel patch module, also known as kernel live patches, you can use the kpatch-dnf DNF plugin. The plugin enables automatic subscription for any kernel the system currently uses, and also for kernels to-be-installed in the future.
Prerequisites
- You have root permissions on the system.
Procedure
Optional: Check all installed kernels and the kernel you are currently running:
# dnf list installed | grep kernel Updating Subscription Management repositories. Installed Packages ... kernel-core.x86_64 6.12.0-55.9.1.el10 @beaker-BaseOS kernel-core.x86_64 6.12.0-55.9.1.el10 @@commandline ... # uname -r 6.12.0-55.9.1.el10_0.x86_64Install the
kpatch-dnfplugin:# dnf install kpatch-dnfEnable automatic subscription to kernel live patches:
# dnf kpatch auto Updating Subscription Management repositories. Last metadata expiration check: 1:38:21 ago on Fri 17 Sep 2021 07:29:53 AM EDT. Dependencies resolved. ================================================== Package Architecture ================================================== Installing: kpatch-patch-6_12_0-1 x86_64 kpatch-patch-6_12_0-2 x86_64 Transaction Summary =================================================== Install 2 Packages …This command subscribes all currently installed kernels to receiving kernel live patches. The command also installs and applies the latest cumulative live patches, if any, for all installed kernels.
When you update the kernel, live patches are installed automatically during the new kernel installation process.
The kernel patch module is also installed into the
/var/lib/kpatch/directory that is loaded by the systemd system and service manager during future reboots.NoteAn empty live patching package will be installed when there are no live patches available for a given kernel. An empty live patching package will have a kpatch_version-kpatch_release of 0-0, for example
kpatch-patch-6_12_0-1-0-0.el10.x86_64.rpm.The installation of the empty RPM subscribes the system to all future live patches for the given kernel.
Verification
Verify that all installed kernels are patched:
# kpatch list Loaded patch modules: kpatch_6_12_0_2_0_1 [enabled] Installed patch modules: kpatch_6_12_0_1_0_1 (6.12.0-0.el10.x86_64) kpatch_6_12_0_2_0_1 (6.12.0-0.el10.x86_64)The output shows that both the kernel you are running, and the other installed kernel have been patched with fixes from
kpatch-patch-6_12_0-1-0-1.el10.x86_64.rpmandkpatch-patch-6_12_0-2-0-1.el10.x86_64.rpmpackages.NoteEntering the
kpatch listcommand does not return an empty live patching package. Use therpm -qa | grep kpatchcommand instead.# rpm -qa | grep kpatch kpatch-dnf-0.9.7_0.4-4.el10.noarch kpatch-0.9.7-4.el10.noarch kpatch-patch-6_12_0_1-0-0.el10_0.x86_64
9.8. Disabling automatic subscription to the live patching stream
To disable the automatic installation of kpatch-patch packages, you can turn off the automatic subscription feature after subscribing to kernel patch module fixes.
Prerequisites
- You have root permissions on the system.
Procedure
Optional: Check all installed kernels and the kernel you are currently running:
# dnf list installed | grep kernelUpdating Subscription Management repositories. Installed Packages ... kernel-core.x86_64 6.12.0-0.el10 @beaker-BaseOS kernel-core.x86_64 6.12.0-0.el10 @@commandline ...# uname -r6.12.0-0.el10_0.x86_64Disable automatic subscription to kernel live patches:
# dnf kpatch manualUpdating Subscription Management repositories.See
kpatch(1)anddnf-kpatch(8)manual pages for more information.
Verification
You can check for the successful outcome:
# yum kpatch status... Updating Subscription Management repositories. Last metadata expiration check: 0:30:41 ago on Tue Jun 14 15:59:26 2022. Kpatch update setting: *manual*
9.9. Updating kernel patch modules
To update kernel patch modules, use the standard RPM update process. These modules are delivered as RPM packages and are cumulative.
Prerequisites
- The system is subscribed to the live patching stream, as described in Subscribing the currently installed kernels to the live patching stream.
Procedure
Update to a new cumulative version for the current kernel:
# dnf update kpatchThis command automatically installs and applies any updates that are available for the currently running kernel. Including any future released cumulative live patches.
Alternatively, update all installed kernel patch modules:
# dnf update kpatchNoteWhen the system reboots into the same kernel, the kernel is automatically live patched again by the
kpatch.servicesystemd service.
9.10. Removing the live patching package
To disable the kernel live patching solution, remove the live patching package.
Prerequisites
- You have root permissions on the system.
- The live patching package is installed.
Procedure
Select the live patching package:
# dnf list installed | grep kpatch-patchkpatch-patch-6.12.0-0.el10_0.x86_64 0-0.el10 @@commandline ...The example output lists live patching packages that you installed.
Remove the live patching package:
# dnf remove kpatch-patch-6.12.0-0.el10_0.x86_64When a live patching package is removed, the kernel remains patched until the next reboot, but the kernel patch module is removed from disk. On future reboot, the corresponding kernel will no longer be patched.
- Reboot your system.
Verify the live patching package is removed:
# dnf list installed | grep kpatch-patchThe command displays no output if the package has been successfully removed.
Verification
Verify the kernel live patching solution is disabled:
# kpatch listLoaded patch modules:The example output shows that the kernel is not patched and the live patching solution is not active because there are no patch modules that are currently loaded.
Currently, Red Hat does not support reverting live patches without rebooting your system. In case of any issues, contact our support team.
9.11. Uninstalling the kernel patch module
To prevent the kernel live patching solution from applying a kernel patch module on subsequent boots, uninstall it.
Prerequisites
- You have root permissions on the system.
- A live patching package is installed.
- A kernel patch module is installed and loaded.
Procedure
Select a kernel patch module:
# kpatch listLoaded patch modules: kpatch_6_12_0_1_0_1 [enabled] Installed patch modules: kpatch_6_12_0_1_0_1 (6.12.0.el10_0.x86_64) ...Uninstall the selected kernel patch module.
# kpatch uninstall kpatch_6_12_0_1_0_1uninstalling kpatch_6_12_0_1_0_1 (6.12.0.el10_0.x86_64)Note that the uninstalled kernel patch module is still loaded:
# kpatch listLoaded patch modules: kpatch_6_12_0_1_0_1 [enabled] Installed patch modules: kpatch_6_12_0_1_0_1 (6.12.0.el10_0.x86_64)When the selected module is uninstalled, the kernel remains patched until the next reboot, but the kernel patch module is removed from disk.
- Reboot your system.
Verification
Verify that the kernel patch module is uninstalled:
# kpatch listLoaded patch modules: ...This example output shows no loaded or installed kernel patch modules, therefore the kernel is not patched and the kernel live patching solution is not active.
9.12. Disabling kpatch.service
To prevent the kernel live patching solution from applying all kernel patch modules globally on subsequent boots, disable the kpatch service.
Prerequisites
- You have root permissions on the system.
- A live patching package is installed.
- A kernel patch module is installed and loaded.
Procedure
Verify
kpatch.serviceis enabled.# systemctl is-enabled kpatch.serviceenabledDisable
kpatch.service:# systemctl disable kpatch.serviceRemoved /etc/systemd/system/multi-user.target.wants/kpatch.service.Note that the applied kernel patch module is still loaded:
# kpatch listLoaded patch modules: kpatch_6_12_0_1_0_1 [enabled] Installed patch modules: kpatch_6_12_0_1_0_1 (6.12.0.el10_0.x86_64)
- Reboot your system.
Optional: Verify the status of
kpatch.service.# systemctl status kpatch.service● kpatch.service - "Apply kpatch kernel patches" Loaded: loaded (/usr/lib/systemd/system/kpatch.service; disabled; vendor preset: disabled) Active: inactive (dead)The example output testifies that
kpatch.serviceis disabled. Thereby, the kernel live patching solution is not active.Verify that the kernel patch module has been unloaded.
# kpatch listLoaded patch modules: Installed patch modules: kpatch_6_12_0_1_0_1 (6.12.0.el10_0.x86_64)The example output shows that a kernel patch module is still installed but the kernel is not patched.
ImportantCurrently, Red Hat does not support reverting live patches without rebooting your system. In case of any issues, contact our support team.
Chapter 10. Keeping kernel panic parameters disabled in virtualized environments
Do not enable the softlockup_panic and nmi_watchdog kernel parameters when configuring virtual machines in Red Hat Enterprise Linux 10. These parameters can cause spurious soft lockups that result in a kernel panic.
The reasons behind this advice are as follows.
10.1. What is a soft lockup
A soft lockup usually indicates a bug. The affected task runs in kernel space on one CPU without rescheduling. The task also does not allow any other task to execute on that particular CPU.
As a result, a warning is displayed to a user through the system console. This problem is also referred to as the soft lockup firing.
10.2. Parameters controlling kernel panic
Control system behavior during soft lockups by configuring certain kernel parameters. You can enable detection mechanisms, adjust thresholds, and determine if the kernel panics to manage system stability.
softlockup_panicControls whether the kernel panics when a soft lockup is detected.
Expand Table 10.1. Valid values for softlockup_panic Type Value Effect Integer
0
kernel does not panic on soft lockup
Integer
1
kernel panics on soft lockup
By default, on RHEL 10, this value is 0.
The system needs to detect a hard lockup first to be able to panic. The detection is controlled by the
nmi_watchdogparameter.nmi_watchdogControls whether lockup detection mechanisms (
watchdogs) are active or not. This parameter is of integer type.Expand Table 10.2. Valid values for nmi_watchdog Value Effect 0
disables lockup detector
1
enables lockup detector
The hard lockup detector monitors each CPU for its ability to respond to interrupts.
watchdog_threshControls frequency of watchdog
hrtimer, NMI events, and soft or hard lockup thresholds.Expand Table 10.3. Relationship between default threshold and soft lockup threshold for watchdog_thresh Default threshold Soft lockup threshold 10 seconds
2 *
watchdog_threshSetting this parameter to zero disables lockup detection altogether.
10.3. Spurious soft lockups in virtualized environments
The soft lockup firing on physical hosts usually represents a kernel or a hardware bug. The same phenomenon happening on guest operating systems in virtualized environments might represent a false warning.
Heavy workload on a host or high contention over some specific resource, such as memory, can cause a spurious soft lockup firing because the host might schedule out the guest CPU for a period longer than 20 seconds. When the guest CPU is again scheduled to run on the host, it experiences a time jump that triggers the due timers. The timers also include the hrtimer watchdog that can report a soft lockup on the guest CPU.
Soft lockup in a virtualized environment can be false. You must not enable the kernel parameters that trigger a system panic when a soft lockup reports to a guest CPU.
To understand soft lockups in guests, it is essential to know that the host schedules the guest as a task, and the guest then schedules its own tasks.
Chapter 11. Adjusting kernel parameters for database servers
Configure the required kernel parameters to ensure efficient operation of database servers and databases.
11.1. Introduction to database servers
A database server is a service that provides features of a database management system (DBMS). DBMS provides utilities for database administration and interacts with end users, applications, and databases.
Red Hat Enterprise Linux 10 provides the following database management systems:
- MariaDB 10.11
- MySQL 8.4
- PostgreSQL 16
- Valkey 7.2
11.2. Parameters affecting performance of database applications
Review the kernel parameters that affect database application performance, such as fs.aio-max-nr, fs.file-max, kernel.shmall and others. Adjusting these settings helps you manage asynchronous I/O, file handles, and shared memory for optimal database efficiency.
fs.aio-max-nrDefines the maximum number of asynchronous I/O operations the system can handle on the server.
NoteRaising the
fs.aio-max-nrparameter produces no additional changes beyond increasing the aio limit.fs.file-maxDefines the maximum number of file handles (temporary file names or IDs assigned to open files) the system supports at any instance.
The kernel dynamically allocates file handles whenever a file handle is requested by an application. However, the kernel does not free these file handles when they are released by the application. It recycles these file handles instead. The total number of allocated file handles will increase over time even though the number of currently used file handles might be low.
kernel.shmall-
Defines the total number of shared memory pages that can be used system-wide. To use the entire main memory, the value of the
kernel.shmallparameter should be ≤ total main memory size. kernel.shmmax- Defines the maximum size in bytes of a single shared memory segment that a Linux process can allocate in its virtual address space.
kernel.shmmni- Defines the maximum number of shared memory segments the database server is able to handle.
net.ipv4.ip_local_port_range- The system uses this port range for programs that connect to a database server without specifying a port number.
net.core.rmem_default- Defines the default receive socket memory through Transmission Control Protocol (TCP).
net.core.rmem_max- Defines the maximum receive socket memory through Transmission Control Protocol (TCP).
net.core.wmem_default- Defines the default send socket memory through Transmission Control Protocol (TCP).
net.core.wmem_max- Defines the maximum send socket memory through Transmission Control Protocol (TCP).
vm.dirty_bytes/vm.dirty_ratio-
Defines a threshold in bytes / in percentage of dirty-able memory at which a process generating dirty data is started in the
write()function.
Either vm.dirty_bytes or vm.dirty_ratio can be specified at a time.
vm.dirty_background_bytes/vm.dirty_background_ratio- Defines a threshold in bytes / in percentage of dirty-able memory at which the kernel tries to actively write dirty data to hard-disk.
Either vm.dirty_background_bytes or vm.dirty_background_ratio can be specified at a time.
vm.dirty_writeback_centisecsDefines a time interval between periodic wake-ups of the kernel threads responsible for writing dirty data to hard-disk.
This kernel parameters measures in 100th’s of a second.
vm.dirty_expire_centisecsDefines the time of dirty data that becomes old to be written to hard-disk.
This kernel parameters measures in 100th’s of a second.
Chapter 12. Configuring huge pages
The system manages physical memory in fixed-size pages. The default 4KiB page size on x86_64 is suitable for general workloads, but applications with large data sets benefit from huge pages. Configure huge pages in Red Hat Enterprise Linux 10 to improve performance and reduce resource usage.
12.1. Available huge page features
With Red Hat Enterprise Linux, you can use huge pages for applications that work with big data sets, and improve the performance of such applications.
The following are the huge page methods, which are supported in RHEL:
HugeTLB pagesHugeTLB pages are also called static huge pages. There are two ways of reserving HugeTLB pages:
-
At boot time: It increases the possibility of success because the memory has not yet been significantly fragmented. However, on NUMA machines, the number of pages is automatically split among the NUMA nodes. -
At runtime: It allows you to reserve the huge pages per NUMA node. If the runtime reservation is done as early as possible in the boot process, the probability of memory fragmentation is lower.
-
Transparent HugePages (THP)With THP, the kernel automatically assigns huge pages to processes, and therefore there is no need to manually reserve the static huge pages. The following are the two modes of operation in THP:
-
system-wide: Here, the kernel tries to assign huge pages to a process whenever it is possible to allocate the huge pages and the process is using a large contiguous virtual memory area. per-process: Here, the kernel only assigns huge pages to the memory areas of individual processes which you can specify using themadvise() system call.NoteThe THP feature only supports
2 MBpages.
-
12.2. Parameters for reserving HugeTLB pages at boot time
Influence HugeTLB page behavior at boot time by using certain kernel parameters.
For more information about how to use these parameters to configure HugeTLB pages at boot time, see Configuring HugeTLB at boot time.
| Parameter | Description | Default value |
|---|---|---|
|
| Defines the number of persistent huge pages configured in the kernel at boot time. In a NUMA system, huge pages, that have this parameter defined, are divided equally between nodes.
You can assign huge pages to specific nodes at runtime by changing the value of the nodes in the |
The default value is
To update this value at boot, change the value of this parameter in the |
|
| Defines the size of persistent huge pages configured in the kernel at boot time. |
Valid values are |
|
| Defines the default size of persistent huge pages configured in the kernel at boot time. |
Valid values are |
12.3. Configuring HugeTLB at boot time
With the Huge Translation Lookaside Buffer (HugeTLB), you can use huge pages by reserving them at boot time. You can minimize the memory fragmentation to ensure that sufficient resources are available for workloads that can benefit from larger memory pages.
12.3.1. Configuring HugeTLB by using kernel command line parameters
To reserve Huge Translation Lookaside Buffer (HugeTLB) pages at the earliest boot stage, you can use kernel command-line parameters. This method ensures the highest chance of successfully reserving the required number and size of huge pages, as memory is allocated during the kernel boot.
Prefer reserving HugeTLB pages by using kernel boot parameters, as this method ensures allocation of larger contiguous memory regions compared to using a systemd unit.
The examples in the procedure demonstrate how to use the command-line options for configuring HugeTLB pages. These examples do not necessarily apply to your system configuration. Review your system requirements and objectives before applying these settings in your environment.
Prerequisites
- You must have root privileges on your system.
Procedure
Update the kernel command line to include HugeLTB options.
To reserve HugeTLB pages of the default size for your architecture, enter:
# grubby --update-kernel=ALL --args="hugepages=10"This command reserves 10 HugeTLB pages of the default pool size. For example, on
x86_64, the default pool size is2 MB. On systems with Non-Uniform Memory Access (NUMA), the allocation is distributed evenly across NUMA nodes. If the system has two NUMA nodes, each node reserves five pages.To reserve different sizes of HugeTLB pages, specify the
hugepageszandhugepagesoptions in the kernel command line, enter:# grubby --update-kernel=ALL --args="hugepagesz=2M hugepages=10 hugepagesz=1G hugepages=1"This command reserves 10 pages of
2 MBeach and 1 page of1 GB.The system reserves the specified number and size of HugeTLB pages at boot time, ensuring that memory is allocated before the operating system begins normal operation.
ImportantThe order of the options is significant. Each
hugepagesz=option must be immediately followed by its correspondinghugepages=option.
12.3.2. Configuring HugeTLB by using systemd service unit
To configure Huge Translation Lookaside Buffer (HugeTLB) pages during user-space booting, use a systemd service unit. This reserves memory after kernel initialization but before most services start, ensuring applications have access to the required pages.
Prerequisites
- You must have root privileges on your system.
Procedure
Create a new file called
hugetlb-gigantic-pages.servicein the/usr/lib/systemd/system/directory and add the following content:[Unit] Description=HugeTLB Gigantic Pages Reservation DefaultDependencies=no Before=dev-hugepages.mount ConditionPathExists=/sys/devices/system/node ConditionKernelCommandLine=hugepagesz=1G [Service] Type=oneshot RemainAfterExit=yes ExecStart=/usr/lib/systemd/hugetlb-reserve-pages.sh [Install] WantedBy=sysinit.targetCreate a new file called
hugetlb-reserve-pages.shin the/usr/lib/systemd/directory and add the following content:#!/bin/sh nodes_path=/sys/devices/system/node/ if [ ! -d $nodes_path ]; then echo "ERROR: $nodes_path does not exist" exit 1 fi reserve_pages() { echo $1 > $nodes_path/$2/hugepages/hugepages-1048576kB/nr_hugepages } reserve_pages <number_of_pages> <node>Replace
<number_of_pages>with the number of 1GB pages you want to reserve, and<node>with the node name on which to reserve these pages. For example, to reserve two 1 GB pages onnode0and one 1GB page onnode1, replace<number_of_pages>with2fornode0and1fornode1.Create an executable script:
# chmod +x /usr/lib/systemd/hugetlb-reserve-pages.shEnable early boot reservation:
# systemctl enable hugetlb-gigantic-pages.serviceNote-
You can try reserving more 1 GB pages at runtime by writing to the
nr_hugepagesattribute at any time. However, to prevent failures due to memory fragmentation, reserve 1 GB pages early during the boot process. - Reserving static huge pages can effectively reduce the amount of memory available to the system, and prevent it from using its full memory capacity. Although a properly sized pool of reserved huge pages can be beneficial to applications that use it, an oversized or unused pool of reserved huge pages will eventually be detrimental to the overall system performance. When setting a reserved huge page pool, ensure that the system can properly use its full memory capacity.
-
You can try reserving more 1 GB pages at runtime by writing to the
12.4. Parameters for reserving HugeTLB pages at run time
Influence HugeTLB page behavior at run time by using certain kernel parameters.
For more information about how to use these parameters to configure HugeTLB pages at run time, see Configuring HugeTLB at run time.
| Parameter | Description | File name |
|---|---|---|
|
| Defines the number of huge pages of a specified size assigned to a specified NUMA node. |
|
|
| Defines the maximum number of additional huge pages that can be created and used by the system through overcommitting memory. Writing any nonzero value into this file indicates that the system obtains that number of huge pages from the kernel’s normal page pool if the persistent huge page pool is exhausted. As these surplus huge pages become unused, they are then freed and returned to the kernel’s normal page pool. |
|
12.5. Configuring HugeTLB at run time
Configure HugeTLB pages at runtime to improve memory performance for applications that require large memory allocations. Reserve huge pages on specific NUMA nodes with specified sizes.
Procedure
Display the memory statistics:
# numastat -cm | egrep 'Node|Huge'Node 0 Node 1 Node 2 Node 3 Total add AnonHugePages 0 2 0 8 10 HugePages_Total 0 0 0 0 0 HugePages_Free 0 0 0 0 0 HugePages_Surp 0 0 0 0 0Add the number of huge pages of a specified size to the node:
# echo 20 > /sys/devices/system/node/node2/hugepages/hugepages-2048kB/nr_hugepagesReplace the following values:
- 20 with the number of huge pages you want to reserve
- 2048 with the size of the huge pages in KiB
node2 with the NUMA node on which you want to reserve the pages
NoteThe directory name format in the path is
hugepages-size_KiBwhere size is specified in KiB. The actual directory name might appear ashugepages-2048KiBorhugepages-2048kBdepending on your system.
Verification
Ensure that the number of huge pages are added:
# numastat -cm | egrep 'Node|Huge'Node 0 Node 1 Node 2 Node 3 Total AnonHugePages 0 2 0 8 10 HugePages_Total 0 0 40 0 40 HugePages_Free 0 0 40 0 40 HugePages_Surp 0 0 0 0 0See
numastat(8)man page for more information.
12.6. Managing transparent huge pages
Transparent huge pages (THP) are enabled by default in Red Hat Enterprise Linux 10. However, you can enable, disable, or set the transparent huge pages to madvise with runtime configuration, TuneD profiles, kernel command line parameters, or systemd unit file.
12.6.1. Managing transparent huge pages with runtime configuration
To optimize memory usage, manage transparent huge pages (THP) at runtime. Note that runtime configuration does not persist across reboots.
Procedure
Check the status of THP:
$ cat /sys/kernel/mm/transparent_hugepage/enabledConfigure THP.
Enabling THP:
$ echo always > /sys/kernel/mm/transparent_hugepage/enabledDisabling THP:
$ echo never > /sys/kernel/mm/transparent_hugepage/enabledSetting THP to
madvise:$ echo madvise > /sys/kernel/mm/transparent_hugepage/enabledTo prevent applications from allocating more memory resources than necessary, disable the system-wide transparent huge pages and only enable them for the applications that explicitly request it through the
madvisesystem call.NoteSometimes, providing low latency to short-lived allocations has higher priority than immediately achieving the best performance with long-lived allocations. In such cases, you can disable direct compaction while leaving THP enabled.
Direct compaction is a synchronous memory compaction during the huge page allocation. Disabling direct compaction provides no guarantee of saving memory, but can decrease the risk of higher latencies during frequent page faults. Also, disabling direct compaction allows synchronous compaction of Virtual Memory Areas (VMAs) highlighted in
madviseonly. Note that if the workload benefits significantly from THP, the performance decreases. Disable direct compaction:$ echo never > /sys/kernel/mm/transparent_hugepage/defrag
See the
madvise(2)man page on your system for more information.
12.6.2. Managing transparent huge pages with TuneD profiles
To manage transparent huge pages (THP) persistently, use TuneD profiles. Configure these profiles in the tuned.conf file.
Prerequisites
-
TuneDpackage is installed. -
TuneDservice is enabled.
Procedure
Copy the active profile file to the same directory:
$ sudo cp -R /usr/lib/tuned/my_profile /usr/lib/tuned/my_copied_profileEdit the
tune.conffile:$ sudo vi /usr/lib/tuned/my_copied_profile/tuned.confTo enable THP, add the line:
[bootloader] cmdline = transparent_hugepage=alwaysTo disable THP, add the line:
[bootloader] cmdline = transparent_hugepage=neverTo set THP to
madvise, add the line:[bootloader] cmdline = transparent_hugepage=madvise
Restart the
TuneDservice:$ sudo systemctl restart tunedSet the new profile active:
$ sudo tuned-adm profile my_copied_profile
Verification
Verify that the new profile is active:
$ sudo tuned-adm activeVerify that the required mode of THP is set:
$ cat /sys/kernel/mm/transparent_hugepage/enabled
12.6.3. Managing transparent huge pages with kernel command line parameters
To manage transparent huge pages (THP) at boot time, modify the kernel parameters. This configuration persists across reboots.
Prerequisites
- You have root permissions on the system.
Procedure
Get the current kernel command line parameters:
# grubby --info=$(grubby --default-kernel)kernel="/boot/vmlinuz-6.12.X-XXX.XX.X.el10_0.x86_64" args="ro crashkernel=1G-4G:192M,4G-64G:256M,64G-:512M resume=UUID=XXXXXXXX-XXXX-XXXX-XXXX-XXXXXXXXXXXXX console=tty0 console=ttyS0" root="UUID=XXXXXXXXX-XXXX-XXXX-XXXX-XXXXXXXXXXXX" initrd="/boot/initramfs-6.12.X-XXX.XX.X.el10_0.x86_64.img" title="Red Hat Enterprise Linux (6.12.X-XXX.XX.X.el10_0.x86_64) 10.0" id="XXXXXXXXXXXXXXXXXXXXXXXXXXXXXX-6.12.X-XXX.XX.X.el10_0.x86_64"Configure THP by adding kernel parameters.
To enable THP:
# grubby --args="transparent_hugepage=always" --update-kernel=DEFAULTTo disable THP:
# grubby --args="transparent_hugepage=never" --update-kernel=DEFAULTTo set THP to
madvise:# grubby --args="transparent_hugepage=madvise" --update-kernel=DEFAULT
Reboot the system for changes to take effect:
# reboot
Verification
To verify the status of THP, view the following files:
# cat /sys/kernel/mm/transparent_hugepage/enabledalways madvise [never]# grep AnonHugePages: /proc/meminfoAnonHugePages: 0 kB# grep nr_anon_transparent_hugepages /proc/vmstatnr_anon_transparent_hugepages 0
12.6.4. Managing transparent huge pages with a systemd unit file
To manage transparent huge pages (THP) at system startup, use systemd unit files. Creating a service ensures consistent THP configuration across reboots.
Prerequisites
- You have root permissions on the system.
Procedure
-
Create new systemd service files for enabling, disabling and setting THP to
madvise. For example,/etc/systemd/system/disable-thp.service. Configure THP by adding the following contents to a new systemd service file.
To enable THP, add the following content to
<new_thp_file>.servicefile:[Unit] Description=Enable Transparent Hugepages After=local-fs.target Before=sysinit.target [Service] Type=oneshot RemainAfterExit=yes ExecStart=/bin/sh -c 'echo always > /sys/kernel/mm/transparent_hugepage/enabled [Install] WantedBy=multi-user.targetTo disable THP, add the following content to
<new_thp_file>.servicefile:[Unit] Description=Disable Transparent Hugepages After=local-fs.target Before=sysinit.target [Service] Type=oneshot RemainAfterExit=yes ExecStart=/bin/sh -c 'echo never > /sys/kernel/mm/transparent_hugepage/enabled [Install] WantedBy=multi-user.targetTo set THP to
madvise, add the following content to<new_thp_file>.servicefile:[Unit] Description=Madvise Transparent Hugepages After=local-fs.target Before=sysinit.target [Service] Type=oneshot RemainAfterExit=yes ExecStart=/bin/sh -c 'echo madvise > /sys/kernel/mm/transparent_hugepage/enabled [Install] WantedBy=multi-user.target
Enable and start the service:
# systemctl enable <new_thp_file>.service# systemctl start <new_thp_file>.service
Verification
To verify the status of THP, view the following files:
$ cat /sys/kernel/mm/transparent_hugepage/enabled
12.7. Impact of page size on translation lookaside buffer size
Reading address mappings from the page table is time-consuming and resource-expensive, so CPUs are built with a cache for recently-used addresses, called the Translation Lookaside Buffer (TLB). However, the default TLB can only cache a certain number of address mappings.
If a requested address mapping is not in the TLB, called a TLB miss, the system still needs to read the page table to determine the physical to virtual address mapping. Because of the relationship between application memory requirements and the size of pages used to cache address mappings, applications with large memory requirements are more likely to suffer performance degradation from TLB misses than applications with minimal memory requirements. It is therefore important to avoid TLB misses wherever possible.
Both HugeTLB and Transparent Huge Page features allow applications to use pages larger than 4 KB. This allows addresses stored in the TLB to reference more memory, which reduces TLB misses and improves application performance.
Chapter 13. Managing memory devices
As a system administrator, you can configure how Red Hat Enterprise Linux (RHEL) manages newly added memory devices. By default, RHEL uses udev rules to automatically online hot-plugged memory. You can disable this behavior if you require manual control over memory onlining.
13.1. Automatic memory onlining with udev
Red Hat Enterprise Linux (RHEL) uses udev rules to automatically online newly added memory devices, including Compute Express Link (CXL) memory. This mechanism ensures that hot-plugged memory blocks are immediately available to the operating system without manual intervention.
The default udev rule for memory hot-plug operations is located at /usr/lib/udev/rules.d/40-redhat-hotplug.rules. This file contains the configuration that triggers automatic memory onlining and, where applicable, assigns memory blocks to ZONE_MOVABLE.
In RHEL bare metal, ZONE_MOVABLE is configured automatically through this default udev rule set. This ensures that when memory is dynamically added to the system, the kernel reserves a portion as ZONE_MOVABLE, which can be safely removed later if needed. No manual configuration is required for hot-plugged memory devices.
13.2. Disabling automatic memory onlining
To prevent newly added memory devices from being immediately available to the operating system, you can disable automatic memory onlining in Red Hat Enterprise Linux. This action is performed by modifying the relevant udev rules.
Prerequisites
- You have root privileges on your system.
Procedure
Copy the default rule to the local override directory:
cp /usr/lib/udev/rules.d/40-redhat-hotplug.rules /etc/udev/rules.d/Edit the
/etc/udev/rules.d/40-redhat-hotplug.rulesfile in a text editor and comment out the lines that handle memory hot-plug operations:# Memory hotadd request #SUBSYSTEM!="memory", GOTO="memory_hotplug_end" #ACTION!="add", GOTO="memory_hotplug_end" #CONST{arch}=="s390*", GOTO="memory_hotplug_end" #CONST{arch}=="ppc64*", GOTO="memory_hotplug_end" #ENV{.state}="online" #CONST{virt}=="none", ENV{.state}="online_movable" #ATTR{state}=="offline", ATTR{state}="$env{.state}" #LABEL="memory_hotplug_end"Reload
udevrules to apply the changes:udevadm control --reload-rules- Reboot the system, or remove the device and add it back to the system to ensure the new configuration takes effect.
Verification
- After disabling automatic onlining, newly added memory blocks will remain offline until you manually online them.
13.3. Manually onlining memory
If you have disabled automatic memory onlining, newly added memory blocks, such as those from a hot-plugged CXL device, remain offline by default. You can manually online these memory blocks by using the sysfs interface.
Prerequisites
- You have root privileges on your system.
Procedure
Identify the offline memory block identifier using the
lsmemcommand:# lsmemRANGE SIZE STATE REMOVABLE BLOCK 0x0000000000000000-0x000000007fffffff 2G online yes 0-1 0x0000000100000000-0x000000087fffffff 30G online yes 4-33 0x0000000880000000-0x00000008ffffffff 2G offline 34-41 Memory block size: 256M Total online memory: 32G Total offline memory: 2GIn this example, the offline memory blocks are
34-41.Online a specific memory block by writing to its state file:
echo online > /sys/devices/system/memory/memory<_identifier_>/stateReplace
memory<_identifier_>with the identifier of the memory block, for example,memory34.
Verification
Verify the memory block is online:
cat /sys/devices/system/memory/memory<_identifier_>/stateonline
13.4. Managing CXL memory devices
CXL v2 memory hot-plugging enables you to add and remove memory resources dynamically in Red Hat Enterprise Linux (RHEL) environments, supporting flexibility and scalability for data center operations. By using CXL memory devices and external switches, you can create shared memory pools that are not limited by traditional system hardware constraints, provided that your system supports CXL v2.
CXL v2 introduces enhanced memory management and hot-plug capabilities, and extends support to bare-metal systems. These enhancements help reduce the risks associated with manual memory node removal, thereby improving system stability and reliability.
Before configuring CXL v2 memory hot-plugging, verify that your system firmware and hardware are compatible with CXL v2.
13.4.1. CXL memory device status levels
A Compute Express Link (CXL) memory device transitions through several states in response to specific system events. The terms "Level 0" through "Level 4" describe the state transitions of a CXL memory device during hot-plug operations.
In RHEL, CXL memory is managed in units called memory regions. A memory region can correspond to a single CXL device or span multiple devices by specifying interleave during creation. Memory incorporated into memory regions must be brought "online" before it is available to the operating system.
You must modify or configure memory regions manually in several scenarios. For example, during a hot-add event, the driver detects the hardware connection but does not automatically configure memory regions or bring the memory online. Similarly, you must manually create memory regions when you want to interleave memory across multiple CXL devices to improve performance, as the driver cannot automatically determine your desired interleave topology.
- Level 0
The CXL driver does not detect the CXL device.
At this stage, the device is not recognized by the kernel.
- Level 1
The CXL driver detects the hardware and establishes a connection.
The device is recognized on system boot, or an interrupt is raised for hot-adding a CXL device. This level indicates the device is connected but unconfigured.
- Level 2
A memory region is created for the CXL device.
A specific memory region has been defined and allocated for the device, but it is not yet enabled.
- Level 3
The memory region is enabled but not yet online for the Operating System.
The CXL memory region is active, but the memory blocks have not been transitioned to the "online" state for kernel use.
- Level 4
The OS can use the hot-added CXL memory device.
At this point, memory blocks are online and available to the operating system. If memory blocks are taken offline, the device returns to Level 3.
13.4.2. Safe offline of hot-removable memory
In Red Hat Enterprise Linux (RHEL), memory used by the kernel or drivers cannot be set to an offline state or hot-removed. RHEL cannot migrate data from these areas, which can block hot-remove operations.
By default, the kernel and drivers can use all memory areas. This behavior prevents other memory devices, such as Compute Express Link (CXL), from being hot-plugged or hot-removed. To avoid this limitation, RHEL allows you to create a ZONE_MOVABLE. This memory area is not used by the kernel or drivers, ensuring that it can be safely hot-removed.
For bare metal systems, RHEL automatically configures ZONE_MOVABLE through the default udev rules for hot-plugged memory. This configuration ensures safer hot-removal of devices like CXL without manual configuration.
13.4.3. Preventing triggering the OOM Killer when hot-adding memory
The kernel requires a certain amount of memory capacity to manage hot-added memory, known as the memmap area. This area uses approximately 1.6% of the memory size, for example, 16GB for 1TB of memory. By default, this is allocated from ZONE_NORMAL. If ZONE_NORMAL has insufficient amount of free memory, the allocation could trigger the Out of Memory (OOM) Killer.
To prevent this, you can allocate the memmap area from the hot-added memory itself. Specific devices, such as Compute Express Link (CXL) devices and standard Dual Inline Memory Modules (DIMMs), support this feature.
Prerequisites
- You have root privileges.
-
Your memory hardware supports allocating
memmapon the device itself. Refer to your hardware manufacturer’s documentation for more information.
Procedure
Enable the
memmap_on_memoryfeature by adding the following kernel boot option:memory_hotplug.memmap_on_memory=1- Reboot the system for the change to take effect.
Verification
Verify the setting is enabled:
# cat /sys/module/memory_hotplug/parameters/memmap_on_memoryY
13.4.4. Hot-plugging CXL memory devices
To dynamically increase system memory, you can hot-plug memory devices, such as Compute Express Link (CXL) modules or Dual Inline Memory Modules (DIMMs), in Red Hat Enterprise Linux.
Prerequisites
- You are running Red Hat Enterprise Linux 8 or later.
- You have root privileges on your system.
- Your system firmware such as BIOS or UEFI, and hardware components such as a CXL switch or backplane, must support memory hot-plug events.
Procedure
Insert the supported memory device into the appropriate slot according to your hardware vendor’s instructions.
The hot-plug event can originate from a physical installation of a memory module into a slot, or from a logical allocation, such as dynamically assigning memory from a CXL shared memory pool.
List the online status of memory blocks and confirm if the newly added memory was automatically onlined:
# lsmemRANGE SIZE STATE REMOVABLE BLOCK 0x0000000000000000-0x000000007fffffff 2G online yes 0-1 0x0000000100000000-0x000000087fffffff 30G online yes 4-33 0x0000000880000000-0x00000008ffffffff 2G offline 34-41 Memory block size: 256M Total online memory: 32G Total offline memory: 2GNoteIf the memory remains offline, verify if automatic memory onlining is disabled. For more information, see Disabling automatic memory onlining. You must manually online the memory blocks if the operation did not complete automatically.
Verification
Check the system memory and NUMA topology to ensure the new memory is fully integrated:
# free -h # numactl -H
If you encounter issues, review hardware documentation and ensure all prerequisites are met.
Troubleshooting
Optional: Review the relevant logs for errors or warnings:
# journalctl -k | grep -i memory # dmesg | tail
13.4.5. Hot-removing CXL memory devices
To safely hot-remove a Compute Express Link (CXL) memory device, you must ensure that the memory is no longer in use by the kernel. You can safely hot-remove a CXL memory device by taking the memory offline and disabling the associated memory regions.
Prerequisites
- You have root privileges on your system.
Procedure
Set the memory to offline.
This allows the kernel to migrate data away from the memory area being removed, ensuring it is no longer in use.
Disable the CXL memory region if it is still active:
# cxl disable-regionNoteThe
cxl disable-regioncommand also automatically takes the memory offline if it is still online.Destroy the CXL memory region:
# cxl destroy-regionDisable the memory device:
# cxl disable-memdev- After all commands complete successfully, physically remove the CXL device or disconnect it using your hardware’s management interface.
13.4.6. Verifying CXL memory status
You can verify the status and configuration of Compute Express Link (CXL) memory devices by using various command-line tools.
Prerequisites
- You have root privileges.
-
The
pciutilspackage is installed (forlspci). -
The
numactlpackage is installed.
Procedure
Check the CXL device connection by using the
lspcicommand:Because CXL is an extension of PCIe, you can use
lspcito view device details.# lspci -vvv 01:00.0 CXL: XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX [CXL Memory Device (CXL 2.x)] Subsystem: XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX ... NUMA node: 0 ...Check the CXL memory status as NUMA nodes:
CXL memory is treated as CPU-less NUMA nodes. Use the
numactlcommand to check the status.# numactl -H --cpu-compress available: 4 nodes (0-3) node 0 cpus: 0-95, 192-287 (192) node 0 size: 15219 MB ... node 2 cpus: (0) node 2 size: 258048 MB ...Verify BIOS/EFI configuration support by checking specifically for a "soft reserved" area in the BIOS-e820 output using
dmesg:[ 0.000000] BIOS-e820: [mem 0x0000001070000000-0x000000506fffffff] soft reservedSupport for configuring CXL memory devices depends on the
EFI_MEMORY_SPBIOS feature. If this setting is not enabled, Red Hat Enterprise Linux (RHEL) treats the CXL device as ordinary RAM. If this setting is not configured, the kernel treats the CXL device as DDR DRAM. Refer to your platform’s firmware setup manual for instructions.
13.4.8. Considerations for hot-unplugging memory devices
When planning to hot-remove memory devices, consider the following potential issues and limitations.
- Migration failure messages
- When offlining memory, you can see migration failure messages such as:
[ 6381.169189] page dumped because: migration failure
[ 6381.181353] migrating pfn 8842600 failed ret:2
...This indicates a failure to move data from the memory targeted for removal. The kernel retries memory migration, and it usually completes successfully. However, hot removal fails depending on system conditions:
- Insufficient memory after removal
- If memory capacity is insufficient after removal, memory migration might fail. Ensure enough free memory remains before starting the hot removal.
- Using Transparent Hugepages
- If Transparent Hugepages are used, there might not be enough free memory for 2MB pages, which can cause migration delays or failures. Consider disabling Transparent Hugepages or ensuring that sufficient free memory is available.
- Using Hugetlb Pages
- 1GB hugepages: Hot removal is not supported.
2MB hugepages: Requires contiguous free memory for migration. If the memory is not available, hot removal fails.
- Out of Memory (OOM) Killer risks
-
If a process is bound to a Non-Uniform Memory Access (NUMA) node through
mbind(MPOL_BIND)and you hot-remove that node, the kernel triggers the OOM Killer due to insufficient memory.
Stop these processes before performing the hot removal.
Chapter 14. Getting started with kernel logging
Kernel logging in Red Hat Enterprise Linux uses the syslog service to record system, kernel, service, and application events into log files for auditing and troubleshooting.
14.1. What is the kernel ring buffer
The kernel uses a ring buffer to store printk() messages, preserving critical information during system startup. This ensures early boot messages are not lost before services such as syslog can read and save them to permanent storage.
The ring buffer is a cyclic data structure that has a fixed size, and is hard-coded into the kernel. Users can display data stored in the kernel ring buffer through the dmesg command or the /var/log/boot.log file. When the ring buffer is full, the new data overwrites the old.
See syslog(2) and dmesg(1) man pages on your system for more information.
14.2. Role of printk on log-levels and kernel logging
Kernel messages have log-levels that indicate their importance. The kernel ring buffer collects all messages. The kernel.printk parameter controls which messages from the buffer are printed to the console.
The log-level values break down in this order:
- 0
- Kernel emergency. The system is unusable.
- 1
- Kernel alert. Action must be taken immediately.
- 2
- Condition of the kernel is considered critical.
- 3
- General kernel error condition.
- 4
- General kernel warning condition.
- 5
- Kernel notice of a normal but significant condition.
- 6
- Kernel informational message.
- 7
- Kernel debug-level messages.
By default, kernel.printk in RHEL 10 has the following values:
# sysctl kernel.printk
kernel.printk = 7 4 1 7The four values define the following, in order:
- Console log-level, defines the lowest priority of messages printed to the console.
- Default log-level for messages without an explicit log-level attached to them.
- Sets the lowest possible log-level configuration for the console log-level.
Sets default value for the console log-level at boot time.
Each of these values defines a different rule for handling error messages.
The default 7 4 1 7 printk value allows for better debugging of kernel activity. However, when coupled with a serial console, this printk setting might cause intense I/O bursts that might lead to a RHEL system becoming temporarily unresponsive. To avoid these situations, setting a printk value of 4 4 1 7 typically works, but at the expense of losing the extra debugging information.
Also note that certain kernel command line parameters, such as quiet or debug, change the default kernel.printk values.
See the syslog(2) man page on your system for more information.
Chapter 15. Reinstalling GRUB
Reinstall the GRUB boot loader to resolve issues caused by incorrect installation, missing files, or system corruption. Reinstalling GRUB is also necessary when upgrading packages, adding boot information to another drive, or restoring control over installed operating systems.
GRUB restores files only if they are not corrupted.
15.1. Reinstalling GRUB on BIOS-based machines
To ensure your BIOS-based system remains functional at startup, reinstall the GRUB boot loader on the system after updating GRUB packages.
This overwrites the existing GRUB to install the new GRUB. Ensure that the system does not cause data corruption or boot crash during the installation.
Procedure
Install
grub2-pc:# grub2-pcReinstall GRUB on the device where it is installed. For example, if
sdais your device:# grub2-install /dev/sdaReboot your system for the changes to take effect:
# rebootSee the
grub2-pc(8)man page on your system for more information.
15.2. Reinstalling GRUB on UEFI-based machines
To resolve boot issues, reinstall the GRUB boot loader on your UEFI-based system.
Ensure that the system does not cause data corruption or boot crash during the installation.
Procedure
Reinstall the
grub2-efiandshimboot loader files:# dnf reinstall grub2-efi-x64 shimReboot your system for the changes to take effect:
# reboot
15.3. Reinstalling GRUB on IBM Power machines
To maintain system bootability on IBM Power systems, reinstall the GRUB boot loader on the Power PC Reference Platform (PReP) boot partition after updating GRUB packages.
This overwrites the existing GRUB to install the new GRUB. Ensure that the system does not cause data corruption or boot crash during the installation.
Procedure
List the disk partition that stores GRUB:
# bootlist -m normal -osda1Reinstall GRUB on the disk partition:
# grub2-install partitionReplace
partitionwith the identified GRUB partition, such as/dev/sda1.Reboot your system for the changes to take effect:
# rebootSee the
grub-install(1)man page on your system for more information.
15.4. Resetting GRUB
To fix boot failures caused by corrupted files or invalid configurations, reset GRUB. This process removes current settings and reinstalls the boot loader with default values.
The following procedure will remove all the customization made by the user.
Procedure
Remove the configuration files:
# rm /etc/grub.d/* # rm /etc/sysconfig/grubReinstall packages.
On BIOS-based machines:
# dnf reinstall grub2-pc grub2-toolsOn UEFI-based machines:
# dnf reinstall grub2-efi shim grub2-tools grub2-common
Rebuild the
grub.cfgfile for the changes to take effect:# grub2-mkconfig -o /boot/grub2/grub.cfgThis applies to both, BIOS and UEFI based systems.
WarningThe path to rebuild
grub.cfgis same for both BIOS and UEFI based machines. Actualgrub.cfgis present at BIOS path only. The UEFI path has a stub file that must not be modified or recreated usinggrub2-mkconfigcommand.-
Follow Reinstalling GRUB procedure to restore GRUB on the
/boot/partition.
Chapter 16. Installing kdump
The kdump service is installed and activated by default on Red Hat Enterprise Linux installations. You can enable and configure kdump during installation with Anaconda or afterward on the command line.
16.1. What is kdump
kdump provides a crash dumping mechanism that generates a vmcore file for analysis. By using the kexec system call, it boots into a reserved capture kernel without a reboot to save the crashed kernel’s memory to a file.
A kernel crash dump can be the only information available if a system failure occur. Therefore, operational kdump is important in mission-critical environments. You must regularly update and test kexec-tools, kdump-utils, and makedumpfile packages in your normal kernel update cycle. This is important when you install new kernel features.
If you have multiple kernels on a machine, you can enable kdump for all installed kernels or for specified kernels only. When you install kdump, the system creates a default /etc/kdump.conf file. /etc/kdump.conf includes the default minimum kdump configuration, which you can edit to customize the kdump configuration.
16.2. Installing kdump using Anaconda
To configure kdump during an interactive installation, use the Anaconda installer’s graphical interface. With this feature, you can enable kdump and reserve the necessary memory.
Procedure
-
On the Anaconda installer, click KDUMP and enable
kdump. - In Kdump Memory Reservation, select Manual` if you must customize the memory reserve.
-
In KDUMP > Memory To Be Reserved (MB), set the required memory reserve for
kdump.
16.3. Installing kdump on the command line
To enable kdump when it is not installed by default, such as in custom Kickstart installations, install the required packages and confirm the installation.
Prerequisites
- An active Red Hat Enterprise Linux subscription.
-
A repository containing the
kexec-tools,kdump-utils, andmakedumpfilepackages for your system CPU architecture. -
Fulfilled requirements for
kdumpconfigurations and targets. For details, see Supported kdump configurations and targets.
Procedure
Check if
kdumpis installed on your system:# rpm -q kexec-tools kdump-utils makedumpfileIf the
kdumpis not installed, install required packages:# dnf install kexec-tools kdump-utils makedumpfile
Chapter 17. Configuring kdump on the command line
Configure kdump memory reservation in the GRUB configuration file. The reserved memory size depends on the crashkernel= value and the system’s physical memory size.
17.1. Estimating the kdump size
To plan and build your kdump environment effectively, estimate the space required by the crash dump file.
The makedumpfile --mem-usage command estimates the space required by the crash dump file. It generates a memory usage report. The report helps you decide the dump level and the pages that are safe to exclude.
Procedure
Enter the following command to generate a memory usage report:
# makedumpfile --mem-usage /proc/kcore TYPE PAGES EXCLUDABLE DESCRIPTION ------------------------------------------------------------- ZERO 501635 yes Pages filled with zero CACHE 51657 yes Cache pages CACHE_PRIVATE 5442 yes Cache pages + private USER 16301 yes User process pages FREE 77738211 yes Free pages KERN_DATA 1333192 no Dumpable kernel dataImportantThe
makedumpfile --mem-usagecommand reports required memory in pages. This means that you must calculate the size of memory in use against the kernel page size.By default the RHEL kernel uses 4 KB sized pages on AMD64 and Intel 64 CPU architectures, and 64 KB sized pages on IBM POWER architectures.
17.2. Configuring kdump memory usage
Configure the memory reservation for kdump. The kdump-utils package provides default crashkernel= values that you can use as a reference when setting memory manually.
The automatic memory allocation for kdump also varies based on the system hardware architecture and available memory size. For example, on AMD64 and Intel 64-bit architectures, the default value for the crashkernel= parameter will work only when the available memory is more than 2 GB. The kdump-utils utility configures the following default memory reserves on AMD64 and Intel 64-bit architecture:
crashkernel=2G-64G:256M,64G-:512M
You can also run kdumpctl estimate to get an approximate value without triggering a crash. The estimated crashkernel= value might not be an exact one but can serve as a reference to set an appropriate crashkernel= value.
The crashkernel=1G-4G:192M,4G-64G:256M,64G:512M option in the boot command line is no longer supported on RHEL 10 and later releases.
The commands to test kdump configuration will cause the kernel to crash with data loss. Follow the instructions with care. You must not use an active production system to test the kdump configuration.
Prerequisites
- You have root permissions on the system.
-
You have fulfilled
kdumprequirements for configurations and targets. For details, see Supported kdump configurations and targets. -
You have installed the
ziplutility if it is the IBM Z system.
Procedure
Configure the default value for crash kernel:
# kdumpctl reset-crashkernel --kernel=ALLWhen configuring the
crashkernel=value, test the configuration by rebooting the system withkdumpenabled. If thekdumpkernel fails to boot, increase the memory size gradually to set an acceptable value.To use a custom
crashkernel=value:Configure the required memory reserve.
crashkernel=192MOptionally, you can set the amount of reserved memory to a variable depending on the total amount of installed memory by using the syntax
crashkernel=<range1>:<size1>,<range2>:<size2>. For example:crashkernel=1G-4G:192M,2G-64G:256MThe example reserves 192 MB of memory if the total amount of system memory is 1 GB or higher and lower than 4 GB. If the total amount of memory is more than 4 GB, 256 MB is reserved for
kdump.Optional: Offset the reserved memory.
Some systems require to reserve memory with a certain fixed offset since
crashkernelreservation is very early, and it wants to reserve some area for special usage. If the offset is set, the reserved memory begins there. To offset the reserved memory, use the following syntax:crashkernel=192M@16MThe example reserves 192 MB of memory starting at 16 MB (physical address 0x01000000). If you offset to 0 or do not specify a value,
kdumpoffsets the reserved memory automatically. You can also offset memory when setting a variable memory reservation by specifying the offset as the last value. For example,crashkernel=1G-4G:192M,2G-64G:256M@16M.Update the boot loader configuration:
# grubby --update-kernel ALL --args "crashkernel=<custom-value>"The
<custom-value>must contain the customcrashkernel=value that you have configured for the crash kernel.
Reboot for changes to take effect:
# reboot
Verification
Cause the kernel to crash by activating the sysrq key. The address-YYYY-MM-DD-HH:MM:SS/vmcore file is saved to the target location as specified in the /etc/kdump.conf file. If you select the default target location, the vmcore file is saved in the partition mounted under /var/crash/.
Activate the
sysrqkey to boot into thekdumpkernel:# echo c > /proc/sysrq-triggerThe command causes kernel to crash and reboots the kernel if required.
Display the
/etc/kdump.conffile and check if thevmcorefile is saved in the target destination.See the
grubby(8)man page on your system for more information.
17.3. Configuring the kdump target
Configure where kdump stores crash dump files. Store dumps locally in the file system or send them over a network by using Network File System (NFS) or Secure Shell (SSH). Only one storage option can be configured at a time. The default behavior stores crash dumps in the /var/crash/ directory of the local file system.
Prerequisites
- You have root permissions on the system.
-
Fulfilled requirements for
kdumpconfigurations and targets. For details, see Supported kdump configurations and targets.
Procedure
To store the crash dump file in
/var/crash/directory of the local file system, edit the/etc/kdump.conffile and specify the path:path /var/crashThe option
path /var/crashrepresents the path to the file system in whichkdumpsaves the crash dump file.Note-
When you specify a dump target in the
/etc/kdump.conffile, then the path is relative to the specified dump target. -
When you do not specify a dump target in the
/etc/kdump.conffile, then the path represents the absolute path from the root directory.
Depending on the file system mounted in the current system, the dump target and the adjusted dump path are configured automatically.
-
When you specify a dump target in the
To secure the crash dump file and the accompanying files produced by
kdump, you should set up proper attributes for the target destination directory, such as user permissions and SELinux contexts. Additionally, you can define a script, for examplekdump_post.shin thekdump.conffile as follows:kdump_post <path_to_kdump_post.sh>The
kdump_postdirective specifies a shell script or a command that executes afterkdumphas completed capturing and saving a crash dump to the specified destination. You can use this mechanism to extend the functionality ofkdumpto perform actions including the adjustments in file permissions.Displaying and understanding the
kdumptarget configuration:Show the effective configuration by filtering out comments and empty lines:
# grep -v '^#' /etc/kdump.conf | grep -v '^$'Example output:
ext4 /dev/mapper/vg00-varcrashvol path /var/crash core_collector makedumpfile -c --message-level 1 -d 31The dump target is specified (
ext4 /dev/mapper/vg00-varcrashvol), and, therefore, it is mounted at/var/crash. Thepathoption is also set to/var/crash. Therefore, thekdumpsaves thevmcorefile in the/var/crash/var/crashdirectory.
To change the local directory for saving the crash dump, edit the
/etc/kdump.confconfiguration file as arootuser:-
Remove the hash sign (
#) from the beginning of the#path /var/crashline. Replace the value with the intended directory path. For example:
path /usr/local/coresImportantIn Red Hat Enterprise Linux 10, the directory defined as the
kdumptarget using thepathdirective must exist when thekdumpsystemd service starts to avoid failures. The directory is no longer created automatically if it does not exist when the service starts.
-
Remove the hash sign (
To write the file to a different partition, edit the
/etc/kdump.confconfiguration file:Remove the hash sign (
#) from the beginning of the#ext4line, depending on your choice.-
device name (the
#ext4 /dev/vg/lv_kdumpline) -
file system label (the
#ext4 LABEL=/bootline) -
UUID (the
#ext4 UUID=03138356-5e61-4ab3-b58e-27507ac41937line)
-
device name (the
Change the file system type and the device name, label or UUID, to the required values. The correct syntax for specifying UUID values is both
UUID="correct-uuid"andUUID=correct-uuid. For example:ext4 UUID=03138356-5e61-4ab3-b58e-27507ac41937ImportantYou must specify storage devices by using a
LABEL=orUUID=. Disk device names such as/dev/sda3are not guaranteed to be consistent across reboot.When you use Direct Access Storage Device (DASD) on IBM Z hardware, ensure the dump devices are correctly specified in
/etc/dasd.confbefore proceeding withkdump.
To write the crash dump directly to a device, edit the
/etc/kdump.confconfiguration file:-
Remove the hash sign (
#) from the beginning of the#raw /dev/vg/lv_kdumpline. Replace the value with the intended device name. For example:
raw /dev/sdb1
-
Remove the hash sign (
To store the crash dump to a remote machine by using the
NFSprotocol:-
Remove the hash sign (
#) from the beginning of the#nfs my.server.com:/export/tmpline. Replace the value with a valid hostname and directory path. For example:
nfs penguin.example.com:/export/coresRestart the
kdumpservice for the changes to take effect:$ sudo systemctl restart kdump.serviceNoteWhile using the NFS directive to specify the NFS target,
kdump.serviceautomatically attempts to mount the NFS target to check the disk space. There is no need to mount the NFS target in advance. To preventkdump.servicefrom mounting the target, use thedracut_args --mountdirective inkdump.conf. This enableskdump.serviceto call thedracututility with the--mountargument to specify the NFS target.
-
Remove the hash sign (
To store the crash dump to a remote machine by using the SSH protocol:
-
Remove the hash sign (
#) from the beginning of the#ssh user@my.server.comline. - Replace the value with a valid username and hostname.
Include your SSH key in the configuration.
-
Remove the hash sign from the beginning of the
#sshkey /root/.ssh/kdump_id_rsaline. Change the value to the location of a key valid on the server you are trying to dump to. For example:
ssh john@penguin.example.com sshkey /root/.ssh/mykey
-
Remove the hash sign from the beginning of the
-
Remove the hash sign (
17.4. Configuring the kdump core collector
To configure the kdump core collector, use the makedumpfile utility. It is the default collector in RHEL and helps reduce crash dump size by compressing data and excluding unnecessary pages.
- Compressing the size of a crash dump file and copying only necessary pages by using various dump levels.
- Excluding unnecessary crash dump pages.
- Filtering the page types to be included in the crash dump.
Crash dump file compression is enabled by default.
If you need to customize the crash dump file compression, follow this procedure.
- Syntax
core_collector makedumpfile -l --message-level 1 -d 31- Options
-
-c,-lor-p: specify compress dump file format by each page using either,zlibfor-coption,lzofor-loption,snappyfor-poption orzstdfor-zoption. -
-d(dump_level): excludes pages so that they are not copied to the dump file. -
--message-level: specify the message types. You can restrict outputs printed by specifyingmessage_levelwith this option. For example, specifying 7 asmessage_levelprints common messages and error messages. The maximum value ofmessage_levelis 31.
-
Prerequisites
- You have root permissions on the system.
-
Fulfilled requirements for
kdumpconfigurations and targets. For details, see Supported kdump configurations and targets.
Procedure
-
As a
root, edit the/etc/kdump.confconfiguration file and remove the hash sign ("#") from the beginning of the#core_collector makedumpfile -l --message-level 1 -d 31. Enter the following command to enable crash dump file compression:
core_collector makedumpfile -l --message-level 1 -d 31The
-loption sets the compressed file format to LZO. The-doption sets the dump level to 31. The--message-leveloption sets the message level to 1. You can also use the-c,-p, or-zoptions to specify other compression formats.See
makedumpfile(8)man page on your system for more information.
17.5. Configuring the kdump default failure responses
To configure the default failure response for kdump, specify an action other than the default reboot. This determines the system behavior when saving the core dump fails.
The additional actions include the following options:
dump_to_rootfs-
Saves the core dump to the
rootfile system. reboot- Reboots the system, losing the core dump in the process.
halt- Stops the system, losing the core dump in the process.
poweroff- Power the system off, losing the core dump in the process.
shell-
Runs a shell session from within the
initramfs, you can record the core dump manually. final_action-
Enables additional operations such as
reboot,halt, andpoweroffafter a successfulkdumpor when shell ordump_to_rootfsfailure action completes. The default isreboot. failure_action-
Specifies the action to perform when a dump might fail in a kernel crash. The default is
reboot.
Prerequisites
- Root permissions.
-
Fulfilled requirements for
kdumpconfigurations and targets. For details, see Supported kdump configurations and targets.
Procedure
-
As a
rootuser, remove the hash sign (#) from the beginning of the#failure_actionline in the/etc/kdump.confconfiguration file. Replace the value with a required action.
failure_action poweroff
17.6. Configuration file for kdump
The configuration file for kdump kernel is /etc/sysconfig/kdump. This file controls the kdump kernel command line parameters. For most configurations, use the default options.
However, in some scenarios you might need to modify certain parameters to control the kdump kernel behavior. For example, modifying the KDUMP_COMMANDLINE_APPEND option to append the kdump kernel command-line to obtain a detailed debugging output or the KDUMP_COMMANDLINE_REMOVE option to remove arguments from the kdump command line.
KDUMP_COMMANDLINE_REMOVEThis option removes arguments from the current
kdumpcommand line. It removes parameters that can causekdumperrors orkdumpkernel boot failures. These parameters might have been parsed from the previousKDUMP_COMMANDLINEprocess or inherited from the/proc/cmdlinefile.When this variable is not configured, it inherits all values from the
/proc/cmdlinefile. Configuring this option also provides information that is helpful in debugging an issue.To remove certain arguments, add them to
KDUMP_COMMANDLINE_REMOVEas follows:# KDUMP_COMMANDLINE_REMOVE="hugepages hugepagesz slub_debug quiet log_buf_len swiotlb"KDUMP_COMMANDLINE_APPENDThis option appends arguments to the current command line. These arguments might have been parsed by the previous
KDUMP_COMMANDLINE_REMOVEvariable.For the
kdumpkernel, disabling certain modules such asmce,cgroup,numa,hest_disablecan help prevent kernel errors. These modules can consume a significant part of the kernel memory reserved forkdumpor causekdumpkernel boot failures.To disable memory cgroups on the
kdumpkernel command line, run the command as follows:KDUMP_COMMANDLINE_APPEND="cgroup_disable=memory"See
/etc/sysconfig/kdumpfile for more information.
17.7. Testing the kdump configuration
After configuring kdump, manually test a system crash and ensure that the vmcore file is generated in the defined kdump target. The vmcore file is captured from the context of the freshly booted kernel. Therefore, vmcore has critical information for debugging a kernel crash.
Do not test kdump on active production systems. The commands to test kdump cause the kernel to crash with data loss. Depending on your system architecture, ensure that you schedule significant maintenance time because kdump testing might require several reboots with a long boot time.
If the vmcore file is not generated during the kdump test, identify and fix issues before you run the test again for a successful kdump testing.
If you make any manual system modifications, you must test the kdump configuration at the end of any system modification. For example, if you make any of the following changes, ensure that you test the kdump configuration for an optimal kdump performances for:
- Package upgrades.
- Hardware level changes, for example, storage or networking changes.
- Firmware upgrades.
- New installation and application upgrades that include third party modules.
- If you use the hot-plugging mechanism to add more memory on hardware that support this mechanism.
-
After you make changes in the
/etc/kdump.confor/etc/sysconfig/kdumpfile.
Prerequisites
- You have root permissions on the system.
-
You have saved all important data. The commands to test
kdumpcause the kernel to crash with loss of data. - You have scheduled significant machine maintenance time depending on the system architecture.
Procedure
Enable the
kdumpservice:# kdumpctl restartCheck the status of the
kdumpservice with thekdumpctl:# kdumpctl statuskdump:Kdump is operationalOptionally, if you use the
systemctlcommand, the output prints in the systemd journal.Start a kernel crash to test the
kdumpconfiguration. Thesysrq-triggerkey combination causes the kernel to crash and might reboot the system if required.# echo c > /proc/sysrq-triggerOn a kernel reboot, the
address-YYYY-MM-DD-HH:MM:SS/vmcorefile is created at the location you have specified in the/etc/kdump.conffile. The default is/var/crash/.
17.8. Files produced by kdump after system crash
After your system crashes, the kdump service captures the kernel memory in a dump file (vmcore) and it also generates additional diagnostic files to aid in troubleshooting and postmortem analysis.
Files produced by kdump:
-
vmcore- main kernel memory dump file containing system memory at the time of the crash. It includes data according to the configuration of thecore_collectorprogram specified inkdumpconfiguration. By default the kernel data structures, process information, stack traces, and other diagnostic information. -
vmcore-dmesg.txt- contents of the kernel ring buffer log (dmesg) from the primary kernel that panicked. -
kexec-dmesg.log- has kernel and system log messages from the execution of the secondarykexeckernel that collects thevmcoredata.
17.9. Enabling and disabling the kdump service
To manage kdump functionality on specific or all installed kernels, you can enable or disable it. Routine testing is required to validate that kdump operates correctly.
Prerequisites
- You have root permissions on the system.
-
You have completed
kdumprequirements for configurations and targets. See Supported kdump configurations and targets. -
All configurations for installing
kdumpare set up as required.
Procedure
Enable the
kdumpservice formulti-user.target:# systemctl enable kdump.serviceStart the service in the current session:
# systemctl start kdump.serviceStop the
kdumpservice:# systemctl stop kdump.serviceDisable the
kdumpservice:# systemctl disable kdump.serviceWarningIt is advisable to set
kptr_restrict=1as default. Whenkptr_restrictis set to (1) as default, thekdumpctlservice loads the crash kernel regardless of Kernel Address Space Layout (KASLR) is enabled.If
kptr_restrictis not set to1and KASLR is enabled, the contents of/proc/korefile are generated as all zeros. Thekdumpctlservice fails to access the/proc/kcorefile and load the crash kernel. Thekexec-kdump-howto.txtfile displays a warning message to setkptr_restrict=1. Verify for the following in thesysctl.conffile to ensure thatkdumpctlservice loads the crash kernel:-
Kernel
kptr_restrict=1in thesysctl.conffile.
-
Kernel
17.10. Preventing kernel drivers from loading for kdump
To prevent specific kernel drivers from loading in the capture kernel, use the KDUMP_COMMANDLINE_APPEND= variable in /etc/sysconfig/kdump. This stops the kdump initramfs from loading modules, helping to avoid out-of-memory (OOM) errors and other crash kernel failures.
You can append the KDUMP_COMMANDLINE_APPEND= variable by using one of the following configuration options:
-
rd.driver.blacklist=<modules> -
modprobe.blacklist=<modules>
Prerequisites
- You have root permissions on the system.
Procedure
Display the list of modules that are loaded to the currently running kernel. Select the kernel module that you intend to block from loading:
$ lsmodModule Size Used by fuse 126976 3 xt_CHECKSUM 16384 1 ipt_MASQUERADE 16384 1 uinput 20480 1 xt_conntrack 16384 1Update the
KDUMP_COMMANDLINE_APPEND=variable in the/etc/sysconfig/kdumpfile. For example:KDUMP_COMMANDLINE_APPEND="rd.driver.blacklist=hv_vmbus,hv_storvsc,hv_utils,hv_netvsc,hid-hyperv"Also, consider the following example by using the
modprobe.blacklist=<modules>configuration option:KDUMP_COMMANDLINE_APPEND="modprobe.blacklist=emcp modprobe.blacklist=bnx2fc modprobe.blacklist=libfcoe modprobe.blacklist=fcoe"Restart the
kdumpservice:# systemctl restart kdumpSee the
dracut.cmdlineman page on your system for more information.
17.11. Running kdump on systems with encrypted disk
To run kdump on systems with LUKS encrypted partitions, ensure sufficient available memory. Insufficient memory causes cryptsetup to fail mounting the partition, preventing vmcore capture in the second kernel (capture kernel).
The kdumpctl estimate command helps you estimate the amount of memory you need for kdump. kdumpctl estimate prints the crashkernel value, which is the most suitable memory size required for kdump.
The crashkernel value is calculated based on the current kernel size, kernel module, initramfs, and the LUKS encrypted target memory requirement.
If you are using the custom crashkernel= option, kdumpctl estimate prints the LUKS required size value. The value is the memory size required for LUKS encrypted target.
Procedure
Print the estimate
crashkernel=value:# *kdumpctl estimate*Encrypted kdump target requires extra memory, assuming using the keyslot with minimum memory requirement Reserved crashkernel: 256M Recommended crashkernel: 652M Kernel image size: 47M Kernel modules size: 8M Initramfs size: 20M Runtime reservation: 64M LUKS required size: 512M Large modules: <none> WARNING: Current crashkernel size is lower than recommended size 652M.-
Configure the amount of required memory by increasing the
crashkernel=value. Reboot the system.
NoteIf the
kdumpservice still fails to save the dump file to the encrypted target, increase thecrashkernel=value as required.
Chapter 18. Enabling kdump
Enable or disable kdump functionality on a specific kernel or all installed kernels in Red Hat Enterprise Linux. Test and validate the kdump functionality regularly to ensure it works correctly.
18.1. Enabling kdump for all installed kernels
To enable the kdump service for all kernels installed on the machine, enable kdump.service after the kdump-utils package is installed.
Prerequisites
- You have root permissions on the system.
Procedure
Add the
crashkernel=command-line parameter to all installed kernels:# grubby --update-kernel=ALL --args="crashkernel=xxM"xxMis the required memory in megabytes.-
In terms of UKI, add the
crashkernel=command-line parameter to all installed UKIs by copying an add-on associated with the required argument from/lib/modules/$(uname -r)/vmlinuz-virt.efi.extra.d/to/boot/efi/loader/addons/. Reboot the system:
# rebootEnable the
kdumpservice:# systemctl enable --now kdump.service
Verification
Check that the
kdumpservice is running:# systemctl status kdump.servicekdump.service - Crash recovery kernel arming Loaded: loaded (/usr/lib/systemd/system/kdump.service; enabled; vendor preset: disabled) Active: active (live)
18.2. Enabling kdump for a specific installed kernel
To enable the kdump service for a specific installed kernel, configure the crashkernel parameter in GRUB for the selected kernel and enable the service to capture crash dumps.
Prerequisites
- You have root permissions on the system.
Procedure
List the kernels installed on the machine:
# ls -a /boot/vmlinuz-*/boot/vmlinuz-0-rescue-2930657cd0dc43c2b75db480e5e5b4a9 /boot/vmlinuz-6.12.0-55.9.1.el10_0.x86_64 /boot/vmlinuz-6.12.0-55.9.1.el10_0.x86_64Add a specific
kdumpkernel to the system’s Grand Unified Boot Loader (GRUB) configuration:For example:
# grubby --update-kernel=vmlinuz-6.12.0-55.9.1.el10_0.x86_64 --args="crashkernel=xxM"xxMis the required memory reserve in megabytes.-
In terms of UKI, add the
crashkernel=command-line parameter to a specific UKI by copying an add-on associated with the required argument from/lib/modules/$(uname -r)/vmlinuz-virt.efi.extra.d/to/boot/efi/EFI/Linux/<machine-id>-<kernel-version>.efi.extra.d/. Enable the
kdumpservice:# systemctl enable --now kdump.service
Verification
Check that the
kdumpservice is running:# systemctl status kdump.servicekdump.service - Crash recovery kernel arming Loaded: loaded (/usr/lib/systemd/system/kdump.service; enabled; vendor preset: disabled) Active: active (live)
18.3. Disabling the kdump service
You can stop the kdump service and disable the service from starting on your Red Hat Enterprise Linux systems.
Prerequisites
-
Fulfilled requirements for
kdumpconfigurations and targets. For details, see Supported kdump configurations and targets.
Procedure
To stop the
kdumpservice in the current session:# systemctl stop kdump.serviceTo disable the
kdumpservice:# systemctl disable kdump.serviceWarningYou must set
kptr_restrict=1as default. Whenkptr_restrictis set to (1) as default, thekdumpctlservice loads the crash kernel regardless of whether the Kernel Address Space Layout (KASLR) is enabled.If
kptr_restrictis not set to1andKASLRis enabled, the contents of/proc/korefile are generated as all zeros. Thekdumpctlservice fails to access the/proc/kcorefile and load the crash kernel. Thekexec-kdump-howto.txtfile displays a warning message, which suggest you to setkptr_restrict=1. Verify for the following in thesysctl.conffile to ensure thatkdumpctlservice loads the crash kernel:-
Kernel
kptr_restrict=1in thesysctl.conffile.
-
Kernel
Chapter 19. Supported kdump configurations and targets
The kdump mechanism generates crash dump files when kernel crashes occur, providing critical information for root cause analysis. Identify supported configurations and targets, configure kdump, and verify its operation on Red Hat Enterprise Linux systems.
19.1. Memory requirements for kdump
For kdump to capture a kernel crash dump and save it for further analysis, a part of the system memory should be permanently reserved for the capture kernel. When reserved, this part of the system memory is not available to the main kernel.
The memory requirements vary based on certain system parameters. One of the major factors is the system’s hardware architecture. To identify the exact machine architecture, such as Intel 64 and AMD64, also known as x86_64, and print it to standard output, use the following command:
$ uname -m
With the stated list of minimum memory requirements, you can set the appropriate memory size to automatically reserve a memory for kdump on the latest available versions. The memory size depends on the system’s architecture and total available physical memory.
| Architecture | Available Memory | Minimum Reserved Memory |
|---|---|---|
|
AMD64 and Intel 64 ( | 2 GB to 64 GB | 256 MB of RAM |
| 64 GB and more | 512 MB of RAM | |
| 64-bit ARM (4k pages) | 1 GB to 4 GB | 256 MB of RAM |
| 4 GB to 64 GB | 320 MB of RAM | |
| 64 GB and more | 576 MB of RAM | |
| 64-bit ARM (64k pages) | 1 GB to 4 GB | 356 MB of RAM |
| 4 GB to 64 GB | 420 MB of RAM | |
| 64 GB and more | 676 MB of RAM | |
|
IBM Power Systems ( | 2 GB to 4 GB | 384 MB of RAM |
| 4 GB to 16 GB | 512 MB of RAM | |
| 16 GB to 64 GB | 1 GB of RAM | |
| 64 GB to 128 GB | 2 GB of RAM | |
| 128 GB and more | 4 GB of RAM | |
|
IBM Z ( | 2 GB to 64 GB | 256 MB of RAM |
| 64 GB and more | 512 MB of RAM |
On many systems, kdump is able to estimate the amount of required memory and reserve it automatically. This behavior is enabled by default, but only works on systems that have more than a certain amount of total available memory, which varies based on the system architecture.
The automatic configuration of reserved memory based on the total amount of memory in the system is a best effort estimation. The actual required memory might vary due to other factors such as I/O devices. Not using enough memory might cause debug kernel unable to boot as a capture kernel in the case of kernel panic. To avoid this problem, increase the crash kernel memory sufficiently.
19.2. Minimum threshold for automatic memory reservation
The kdump-utils utility automatically reserves memory for kdump using the crashkernel parameter. However, this requires a minimum amount of system memory, which varies by architecture. If your system’s memory is below the threshold, you must configure the reservation manually.
| Architecture | Required Memory |
|---|---|
|
AMD64 and Intel 64 ( | 2 GB |
|
IBM Power Systems ( | 2 GB |
|
IBM Z ( | 2 GB |
| 64-bit ARM | 2 GB |
The crashkernel=1G-4G:192M,4G-64G:256M,64G:512M option in the boot command line is no longer supported from RHEL 10.
19.3. Supported kdump targets
When a kernel crash occurs, the operating system saves the dump file on the configured or default target location. You can save the dump file either directly to a device, store as a file on a local file system, or send the dump file over a network. With the following list of dump targets, you can know the targets that are currently supported or not supported by kdump.
| Target type | Supported Targets | Unsupported Targets |
|---|---|---|
| Physical Storage |
|
|
| Network |
|
|
| Hypervisor |
| |
| Filesystem |
The |
The |
| Firmware |
|
19.4. Supported kdump filtering levels
To reduce dump file size, kdump uses makedumpfile to compress data and exclude unwanted information. See the table for supported filtering levels, such as excluding hugepages.
| Option | Description |
|---|---|
|
| Zero pages |
|
| Cache pages |
|
| Cache private |
|
| User pages |
|
| Free pages |
19.5. Supported default failure responses
By default, when kdump fails to create a core dump, the operating system reboots. However, you can configure kdump to perform a different operation in case it fails to save the core dump to the primary target.
dump_to_rootfs- Attempt to save the core dump to the root file system. This option is especially useful in combination with a network target: if the network target is unreachable, this option configures kdump to save the core dump locally. The system is rebooted afterwards.
reboot- Reboot the system, losing the core dump in the process.
halt- Halt the system, losing the core dump in the process.
poweroff- Power off the system, losing the core dump in the process.
shell- Run a shell session from within the initramfs, allowing the user to record the core dump manually.
final_action-
Enable additional operations such as
reboot,halt, andpoweroffactions after a successfulkdumpor whenshellordump_to_rootfsfailure action completes. The defaultfinal_actionoption isreboot. failure_action-
Specifies the action to perform when a dump might fail in case of a kernel crash. The default
failure_actionoption isreboot.
19.6. Using final_action parameter
To perform operations such as reboot, halt, or poweroff after kdump succeeds or fails, use the final_action parameter. The default action is reboot.
Procedure
To configure
final_action, edit the/etc/kdump.conffile and add one of the following options:-
final_action reboot -
final_action halt -
final_action poweroff
-
Restart the
kdumpservice for the changes to take effect.# kdumpctl restart
19.7. Using failure_action parameter
To specify the action when a crash dump fails, use the failure_action parameter. The default action is reboot.
The parameter recognizes the following actions to take:
reboot- Reboots the system after a dump failure.
dump_to_rootfs- Saves the dump file on a root file system when a non-root dump target is configured.
halt- Halts the system.
poweroff- Stops the running operations on the system.
shell-
Starts a shell session inside
initramfs, from which you can manually perform additional recovery actions.
Procedure
To configure an action to take if the dump fails, edit the
/etc/kdump.conffile and specify one of thefailure_actionoptions:-
failure_action reboot -
failure_action halt -
failure_action poweroff -
failure_action shell -
failure_action dump_to_rootfs
-
Restart the
kdumpservice for the changes to take effect.# kdumpctl restart
Chapter 20. Firmware assisted dump mechanisms
Firmware assisted dump (fadump) is an alternative to kdump on IBM POWER systems. It uses onboard firmware to isolate memory regions and prevent accidental overwriting of crash analysis data. The fadump utility is optimized for Red Hat Enterprise Linux on IBM POWER systems.
20.1. Firmware assisted dump on IBM PowerPC hardware
The fadump utility captures vmcore from a fully-reset system by using firmware to preserve memory during a crash. It reuses kdump scripts to save the file. Preserved regions include all system memory except boot memory, registers, and hardware page tables.
The fadump mechanism offers improved reliability over the traditional dump type, by rebooting the partition and using a new kernel to dump the data from the previous kernel crash. The fadump requires an IBM POWER6 processor-based or later version hardware platform.
For further details about the fadump mechanism, including PowerPC specific methods of resetting hardware, see the /usr/share/doc/kdump-utils/fadump-howto.txt file.
The area of memory that is not preserved, known as boot memory, is the amount of RAM required to successfully boot the kernel after a crash event. By default, the boot memory size is 256MB or 5% of total system RAM, whichever is larger.
Unlike kexec-initiated event, the fadump mechanism uses the production kernel to recover a crash dump. When booting after a crash, PowerPC hardware makes the device node /proc/device-tree/rtas/ibm.kernel-dump available to the proc filesystem (procfs). The fadump-aware kdump scripts, check for the stored vmcore, and then complete the system reboot cleanly.
20.2. Enabling firmware assisted dump mechanism
To enhance the crash dumping capabilities of IBM POWER systems, enable the firmware assisted dump (fadump) mechanism.
In the Secure Boot environment, the GRUB boot loader allocates a boot memory region, known as the Real Mode Area (RMA). The RMA has a size of 512 MB, divided among the boot components. If a component exceeds its size allocation, GRUB fails with an out-of-memory (OOM) error.
Do not enable firmware assisted dump (fadump) mechanism in the Secure Boot environment on RHEL 9.1 and earlier versions. The GRUB boot loader fails with the following error:
error: ../../grub-core/kern/mm.c:376:out of memory.
Press any key to continue…
The system is recoverable only if you increase the default initramfs size due to the fadump configuration.
For information about workaround methods to recover the system, see the System boot ends in GRUB Out of Memory (OOM) article.
Prerequisites
- You have root permissions on the system.
Procedure
-
Install the
kexec-tools,kdump-utils, andmakedumpfilepackages. Configure the default value for
crashkernel:# kdumpctl reset-crashkernel --fadump=on --kernel=ALLOptional: Reserve boot memory instead of the default value:
# grubby --update-kernel ALL --args="fadump=on crashkernel=xxM"xxMis the required memory size in megabytes.NoteWhen specifying boot configuration options, test the configurations by rebooting the kernel with
kdumpenabled. If thekdumpkernel fails to boot, increase thecrashkernelvalue gradually to set an appropriate value.Reboot for changes to take effect:
# reboot
20.3. Firmware assisted dump mechanisms on IBM Z hardware
Use firmware assisted dump mechanisms, such as sadump and VMDUMP, to capture the machine state on IBM Z systems. These tools operate during the early boot phase, so you can analyze system failures that occur before the kdump service starts.
IBM Z systems support the following firmware assisted dump mechanisms:
-
Stand-alone dump (sadump) -
VMDUMP
The kdump infrastructure is supported and used on IBM Z systems. However, using one of the firmware assisted dump (fadump) methods for IBM Z has the following benefits:
-
The system console initiates and controls the
sadumpmechanism, and stores it on anIPLbootable device. -
The
VMDUMPmechanism is similar tosadump. This tool is also initiated from the system console, but retrieves the resulting dump from hardware and copies it to the system for analysis. -
These methods (similarly to other hardware based dump mechanisms) have the ability to capture the state of a machine in the early boot phase, before the
kdumpservice starts. -
Although
VMDUMPcontains a mechanism to receive the dump file into a Red Hat Enterprise Linux system, the configuration and control ofVMDUMPis managed from the IBM Z Hardware console.
20.4. Using sadump on Fujitsu PRIMEQUEST systems
To capture a fallback dump when kdump fails on Fujitsu PRIMEQUEST systems, use sadump. Configure kdump using the Management Board (MMB) interface, then enable and manually start sadump.
Procedure
Add or edit the following lines in the
/etc/sysctl.conffile to ensure thatkdumpstarts as expected forsadump:kernel.panic=0 kernel.unknown_nmi_panic=1WarningIn particular, ensure that after
kdump, the system does not reboot. If the system reboots afterkdumphas failed to save thevmcorefile, then it is not possible to start thesadump.Set the
failure_actionparameter in/etc/kdump.confappropriately ashaltorshell.failure_action shellSee the FUJITSU Server PRIMEQUEST 2000 Series Installation Manual for more information.
Chapter 21. Analyzing a core dump
The crash utility analyzes core dumps generated by the kdump, netdump, diskdump, or xendump mechanisms to identify system crash causes. It provides a GDB-like interactive prompt. Alternatively, use the Kernel Oops Analyzer or Kdump Helper tool.
21.1. Installing the crash utility
To analyze a system’s state during runtime or after a kernel crash by examining the vmcore dump file, install the crash utility. This utility provides an interactive shell for debugging running systems and analyzing crash dumps.
Procedure
Enable the relevant repositories:
# subscription-manager repos --enable baseos repository# subscription-manager repos --enable appstream repository# subscription-manager repos --enable rhel-10-for-x86_64-baseos-debug-rpmsInstall the
crashpackage:# dnf install crashInstall the
kernel-debuginfopackage:# dnf install kernel-debuginfoThe package
kernel-debuginfocorresponds to the running kernel and provides the data necessary for the dump analysis.
21.2. Running and exiting the crash utility
To analyze a system crash and troubleshoot kernel-related problems, use the crash utility on a vmcore dump file. Use this tool to gain insights into the system’s state at the time of the crash and identify the root cause of the issue.
Prerequisites
-
Identify the currently running kernel (for example
6.12.0-55.9.1.el10_0.x86_64).
Procedure
To start the
crashutility, two necessary parameters need to be passed to the command:-
The debug-info (a decompressed vmlinuz image), for example
/usr/lib/debug/lib/modules/6.12.0-55.9.1.el10_0.x86_64/vmlinuxprovided through a specifickernel-debuginfopackage. The actual vmcore file, for example
/var/crash/127.0.0.1-2021-09-13-14:05:33/vmcoreThe resulting
crashcommand then looks:# crash /usr/lib/debug/lib/modules/6.12.0-55.9.1.el10_0.x86_64/vmlinux /var/crash/127.0.0.1-2021-09-13-14:05:33/vmcoreUse the same <kernel> version that was captured by
kdump.
-
The debug-info (a decompressed vmlinuz image), for example
Running the crash utility.
The following example shows analyzing a core dump created using the 6.12.0-55.9.1.el10_0.x86_64 kernel.
... WARNING: kernel relocated [202MB]: patching 90160 gdb minimal_symbol values KERNEL: /usr/lib/debug/lib/modules/6.12.0-55.9.1.el10_0.x86_64/vmlinux DUMPFILE: /var/crash/127.0.0.1-2021-09-13-14:05:33/vmcore [PARTIAL DUMP] CPUS: 2 DATE: Mon Sep 13 14:05:16 2021 UPTIME: 01:03:57 LOAD AVERAGE: 0.00, 0.00, 0.00 TASKS: 586 NODENAME: localhost.localdomain RELEASE: 6.12.0-55.9.1.el10_0.x86_64 VERSION: #1 SMP Wed Aug 29 11:51:55 UTC 2018 MACHINE: x86_64 (2904 Mhz) MEMORY: 2.9 GB PANIC: "sysrq: SysRq : Trigger a crash" PID: 10635 COMMAND: "bash" TASK: ffff8d6c84271800 [THREAD_INFO: ffff8d6c84271800] CPU: 1 STATE: TASK_RUNNING (SYSRQ) crash>To exit the interactive prompt and stop the crash utility, type
exitorq.crash> exit ~]#NoteThe
crashcommand is also used as a powerful tool for debugging a live system. However, you must use it with caution to avoid system-level issues.
21.3. Displaying various indicators in the crash utility
To display system indicators like the kernel message buffer, backtrace, process status, virtual memory info, and open files, use the crash utility.
Procedure
To display the kernel message buffer, type the
logcommand at the interactive prompt:crash> log ... several lines omitted ... EIP: 0060:[<c068124f>] EFLAGS: 00010096 CPU: 2 EIP is at sysrq_handle_crash+0xf/0x20 EAX: 00000063 EBX: 00000063 ECX: c09e1c8c EDX: 00000000 ESI: c0a09ca0 EDI: 00000286 EBP: 00000000 ESP: ef4dbf24 DS: 007b ES: 007b FS: 00d8 GS: 00e0 SS: 0068 Process bash (pid: 5591, ti=ef4da000 task=f196d560 task.ti=ef4da000) Stack: c068146b c0960891 c0968653 00000003 00000000 00000002 efade5c0 c06814d0 <0> fffffffb c068150f b7776000 f2600c40 c0569ec4 ef4dbf9c 00000002 b7776000 <0> efade5c0 00000002 b7776000 c0569e60 c051de50 ef4dbf9c f196d560 ef4dbfb4 Call Trace: [<c068146b>] ? __handle_sysrq+0xfb/0x160 [<c06814d0>] ? write_sysrq_trigger+0x0/0x50 [<c068150f>] ? write_sysrq_trigger+0x3f/0x50 [<c0569ec4>] ? proc_reg_write+0x64/0xa0 [<c0569e60>] ? proc_reg_write+0x0/0xa0 [<c051de50>] ? vfs_write+0xa0/0x190 [<c051e8d1>] ? sys_write+0x41/0x70 [<c0409adc>] ? syscall_call+0x7/0xb Code: a0 c0 01 0f b6 41 03 19 d2 f7 d2 83 e2 03 83 e0 cf c1 e2 04 09 d0 88 41 03 f3 c3 90 c7 05 c8 1b 9e c0 01 00 00 00 0f ae f8 89 f6 <c6> 05 00 00 00 00 01 c3 89 f6 8d bc 27 00 00 00 00 8d 50 d0 83 EIP: [<c068124f>] sysrq_handle_crash+0xf/0x20 SS:ESP 0068:ef4dbf24 CR2: 0000000000000000Type
help logfor more information about the command usage.NoteThe kernel message buffer includes the most essential information about the system crash. It is always dumped first into the
vmcore-dmesg.txtfile. If you fail to obtain the fullvmcorefile, for example, due to insufficient space on the target location, you can obtain the required information from the kernel message buffer. By default,vmcore-dmesg.txtis placed in the/var/crash/directory.To display the kernel stack trace, use the
btcommand:crash> bt PID: 5591 TASK: f196d560 CPU: 2 COMMAND: "bash" #0 [ef4dbdcc] crash_kexec at c0494922 #1 [ef4dbe20] oops_end at c080e402 #2 [ef4dbe34] no_context at c043089d #3 [ef4dbe58] bad_area at c0430b26 #4 [ef4dbe6c] do_page_fault at c080fb9b #5 [ef4dbee4] error_code (via page_fault) at c080d809 EAX: 00000063 EBX: 00000063 ECX: c09e1c8c EDX: 00000000 EBP: 00000000 DS: 007b ESI: c0a09ca0 ES: 007b EDI: 00000286 GS: 00e0 CS: 0060 EIP: c068124f ERR: ffffffff EFLAGS: 00010096 #6 [ef4dbf18] sysrq_handle_crash at c068124f #7 [ef4dbf24] __handle_sysrq at c0681469 #8 [ef4dbf48] write_sysrq_trigger at c068150a #9 [ef4dbf54] proc_reg_write at c0569ec2 #10 [ef4dbf74] vfs_write at c051de4e #11 [ef4dbf94] sys_write at c051e8cc #12 [ef4dbfb0] system_call at c0409ad5 EAX: ffffffda EBX: 00000001 ECX: b7776000 EDX: 00000002 DS: 007b ESI: 00000002 ES: 007b EDI: b7776000 SS: 007b ESP: bfcb2088 EBP: bfcb20b4 GS: 0033 CS: 0073 EIP: 00edc416 ERR: 00000004 EFLAGS: 00000246Type
bt <pid>to display the backtrace of a specific process or typehelp btfor more information aboutbtusage.To display the status of processes in the system, use the
pscommand:crash> ps PID PPID CPU TASK ST %MEM VSZ RSS COMM > 0 0 0 c09dc560 RU 0.0 0 0 [swapper] > 0 0 1 f7072030 RU 0.0 0 0 [swapper] 0 0 2 f70a3a90 RU 0.0 0 0 [swapper] > 0 0 3 f70ac560 RU 0.0 0 0 [swapper] 1 0 1 f705ba90 IN 0.0 2828 1424 init ... several lines omitted ... 5566 1 1 f2592560 IN 0.0 12876 784 auditd 5567 1 2 ef427560 IN 0.0 12876 784 auditd 5587 5132 0 f196d030 IN 0.0 11064 3184 sshd > 5591 5587 2 f196d560 RU 0.0 5084 1648 bashUse
ps <pid>to display the status of a single specific process. Use help ps for more information aboutpsusage.To display basic virtual memory information, type the
vmcommand at the interactive prompt:crash> vm PID: 5591 TASK: f196d560 CPU: 2 COMMAND: "bash" MM PGD RSS TOTAL_VM f19b5900 ef9c6000 1648k 5084k VMA START END FLAGS FILE f1bb0310 242000 260000 8000875 /lib/ld-2.12.so f26af0b8 260000 261000 8100871 /lib/ld-2.12.so efbc275c 261000 262000 8100873 /lib/ld-2.12.so efbc2a18 268000 3ed000 8000075 /lib/libc-2.12.so efbc23d8 3ed000 3ee000 8000070 /lib/libc-2.12.so efbc2888 3ee000 3f0000 8100071 /lib/libc-2.12.so efbc2cd4 3f0000 3f1000 8100073 /lib/libc-2.12.so efbc243c 3f1000 3f4000 100073 efbc28ec 3f6000 3f9000 8000075 /lib/libdl-2.12.so efbc2568 3f9000 3fa000 8100071 /lib/libdl-2.12.so efbc2f2c 3fa000 3fb000 8100073 /lib/libdl-2.12.so f26af888 7e6000 7fc000 8000075 /lib/libtinfo.so.5.7 f26aff2c 7fc000 7ff000 8100073 /lib/libtinfo.so.5.7 efbc211c d83000 d8f000 8000075 /lib/libnss_files-2.12.so efbc2504 d8f000 d90000 8100071 /lib/libnss_files-2.12.so efbc2950 d90000 d91000 8100073 /lib/libnss_files-2.12.so f26afe00 edc000 edd000 4040075 f1bb0a18 8047000 8118000 8001875 /bin/bash f1bb01e4 8118000 811d000 8101873 /bin/bash f1bb0c70 811d000 8122000 100073 f26afae0 9fd9000 9ffa000 100073 ... several lines omitted ...Use
vm <pid>to display information about a single specific process, or usehelp vmfor more information aboutvmusage.To display information about open files, use the
filescommand:crash> files PID: 5591 TASK: f196d560 CPU: 2 COMMAND: "bash" ROOT: / CWD: /root FD FILE DENTRY INODE TYPE PATH 0 f734f640 eedc2c6c eecd6048 CHR /pts/0 1 efade5c0 eee14090 f00431d4 REG /proc/sysrq-trigger 2 f734f640 eedc2c6c eecd6048 CHR /pts/0 10 f734f640 eedc2c6c eecd6048 CHR /pts/0 255 f734f640 eedc2c6c eecd6048 CHR /pts/0Use
files <pid>to display files opened by only one selected process, or usehelp filesfor more information aboutfilesusage.
21.4. Using Kernel Oops Analyzer
To analyze crash dumps, use the Kernel Oops Analyzer. It compares oops messages with known issues in the Knowledgebase.
Prerequisites
-
An
oopsmessage is secured to feed the Kernel Oops Analyzer.
Procedure
- Access the Kernel Oops Analyzer tool.
To diagnose a kernel crash issue, upload a kernel oops log generated in
vmcore.-
Alternatively, you can diagnose a kernel crash issue by providing a text message or a
vmcore-dmesg.txtas an input.
-
Alternatively, you can diagnose a kernel crash issue by providing a text message or a
-
Click
DETECTto compare theoopsmessage based on information from themakedumpfileagainst known solutions.
21.5. The Kdump Helper tool
The Kdump Helper tool helps to set up the kdump by using the provided information. Kdump Helper generates a configuration script based on your preferences. Initiating and running the script on your server sets up the kdump service.
Chapter 22. Using early kdump to capture boot time crashes
Early kdump captures vmcore files when crashes occur during early boot phases before system services start. It loads the crash kernel and initramfs earlier in memory to preserve troubleshooting information that would otherwise be lost.
22.1. Enabling early kdump
The early kdump feature sets up the crash kernel and the initial RAM disk image (initramfs) to load early enough to capture the vmcore information for an early crash. This helps to eliminate the risk of losing information about the early boot kernel crashes.
Prerequisites
- An active Red Hat Enterprise Linux subscription.
-
A repository containing the
kexec-tools,kdump-utils, andmakedumpfilepackages for your system CPU architecture. -
Fulfilled
kdumpconfiguration and targets requirements. For more information see, Supported kdump configurations and targets.
Procedure
Verify that the
kdumpservice is enabled and active:# systemctl is-enabled kdump.service && systemctl is-active kdump.service enabled activeIf
kdumpis not enabled and running, set all required configurations and verify thatkdumpservice is enabled.Rebuild the
initramfsimage of the booting kernel with theearly kdumpfunctionality:# dracut -f --add earlykdumpAdd the
rd.earlykdumpkernel command line parameter:# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="rd.earlykdump"Reboot the system to reflect the changes:
# reboot
Verification
Verify that
rd.earlykdumpis successfully added andearly kdumpfeature is enabled:# cat /proc/cmdlineBOOT_IMAGE=(hd0,msdos1)/vmlinuz-6.12.0-55.9.1.el10_0.x86_64 root=/dev/mapper/rhel-root ro crashkernel=2G-64G:256M,64G-:512M resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap rhgb quiet rd.earlykdump# journalctl -x | grep early-kdumpSep 13 15:46:11 redhat dracut-cmdline[304]: early-kdump is enabled. Sep 13 15:46:12 redhat dracut-cmdline[304]: kexec: loaded early-kdump kernelSee the
/usr/share/doc/kdump-utils/early-kdump-howto.txtfile for more information.
Chapter 23. Signing a kernel and modules for Secure Boot
Enhance system security by using signed kernels and kernel modules. On UEFI-based systems with Secure Boot enabled, self-sign privately built kernels or modules and import the public key into target systems.
If Secure Boot is enabled, all of the following components have to be signed with a private key and authenticated with the corresponding public key:
- UEFI operating system boot loader
- The Red Hat Enterprise Linux kernel
- All kernel modules
If any of these components are not signed and authenticated, the system cannot finish the booting process.
Red Hat Enterprise Linux includes:
- Signed boot loaders
- Signed kernels
- Signed kernel modules
In addition, the signed first-stage boot loader (shim) and the signed kernel include embedded Red Hat public keys. These signed executable binaries and embedded keys enable Red Hat Enterprise Linux to install, boot, and run with the Microsoft UEFI Secure Boot Certification Authority keys. These keys are provided by the UEFI firmware on systems that support UEFI Secure Boot.
- Not all UEFI-based systems include support for Secure Boot.
- The build system, where you build and sign your kernel module, does not need to have UEFI Secure Boot enabled and does not even need to be a UEFI-based system.
23.1. Prerequisites
To be able to sign externally built kernel modules, install the utilities from the following packages:
# dnf install pesign openssl kernel-devel mokutil keyutilsExpand Table 23.1. Required utilities Utility Provided by package Used on Purpose efikeygenpesignBuild system
Generates public and private X.509 key pair
opensslopensslBuild system
Exports the unencrypted private key
sign-filekernel-develBuild system
Executable file used to sign a kernel module with the private key
mokutilmokutilTarget system
Optional utility used to manually enroll the public key
keyctlkeyutilsTarget system
Optional utility used to display public keys in the system keyring
23.2. What is UEFI Secure Boot
With the Unified Extensible Firmware Interface (UEFI) Secure Boot technology, you can prevent the execution of the kernel-space code that is not signed by a trusted key. The system boot loader is signed with a cryptographic key. The database of public keys in the firmware authorizes the process of signing the key.
You can subsequently verify a signature in the next-stage boot loader and the kernel.
UEFI Secure Boot establishes a chain of trust from the firmware to the signed drivers and kernel modules as follows:
-
An UEFI private key signs, and a public key authenticates the
shimfirst-stage boot loader. A certificate authority (CA) in turn signs the public key. The CA is stored in the firmware database. -
The
shimfile contains the Red Hat public key Red Hat Secure Boot (CA key 1) to authenticate the GRUB boot loader and the kernel. - The kernel in turn contains public keys to authenticate drivers and modules.
Secure Boot is the boot path validation component of the UEFI specification. The specification defines:
- Programming interface for cryptographically protected UEFI variables in non-volatile storage.
- Storing the trusted X.509 root certificates in UEFI variables.
- Validation of UEFI applications such as boot loaders and drivers.
- Procedures to revoke known-bad certificates and application hashes.
UEFI Secure Boot helps in the detection of unauthorized changes but does not:
- Prevent installation or removal of second-stage boot loaders.
- Require explicit user confirmation of such changes.
- Stop boot path manipulations. Signatures are verified during booting but not when the boot loader is installed or updated.
If the boot loader or the kernel are not signed by a system trusted key, Secure Boot prevents them from starting.
23.3. UEFI Secure Boot support
You can install and run Red Hat Enterprise Linux 10 on systems with enabled UEFI Secure Boot if the kernel and all the loaded drivers are signed with a trusted key. Red Hat provides kernels and drivers that are signed and authenticated by the applicable Red Hat keys.
If you want to load externally built kernels or drivers, you must sign them as well.
- Restrictions imposed by UEFI Secure Boot
- The system only runs the kernel-mode code after its signature has been properly authenticated.
- GRUB module loading is disabled because there is no infrastructure for signing and verification of GRUB modules. Allowing module loading would run untrusted code within the security perimeter defined by Secure Boot.
- Red Hat provides a signed GRUB binary that has all supported modules on Red Hat Enterprise Linux.
23.4. Requirements for authenticating kernel modules with X.509 keys
Review the requirements for authenticating kernel modules with X.509 keys. The kernel validates module signatures against trusted keyrings, such as .builtin_trusted_keys and .platform, to enforce security policies based on the UEFI Secure Boot configuration.
In Red Hat Enterprise Linux 10, when a kernel module is loaded, the kernel checks the signature of the module against the public X.509 keys from the kernel system keyring (.builtin_trusted_keys) and the kernel platform keyring (.platform). The .platform keyring provides keys from third-party platform providers and custom public keys. The keys from the kernel system .blacklist keyring are excluded from verification.
You need to meet certain conditions to load kernel modules on systems with enabled UEFI Secure Boot functionality:
If UEFI Secure Boot is enabled or if the
module.sig_enforcekernel parameter has been specified:-
You can only load those signed kernel modules whose signatures were authenticated against keys from the system keyring (
.builtin_trusted_keys) or the platform keyring (.platform). -
The public key must not be on the system revoked keys keyring (
.blacklist).
-
You can only load those signed kernel modules whose signatures were authenticated against keys from the system keyring (
If UEFI Secure Boot is disabled and the
module.sig_enforcekernel parameter has not been specified:- You can load unsigned kernel modules and signed kernel modules without a public key.
If the system is not UEFI-based or if UEFI Secure Boot is disabled:
-
Only the keys embedded in the kernel are loaded onto
.builtin_trusted_keysand.platform. - You have no ability to augment that set of keys without rebuilding the kernel.
-
Only the keys embedded in the kernel are loaded onto
| Module signed | Public key found and signature valid | UEFI Secure Boot state | sig_enforce | Module load | Kernel tainted |
|---|---|---|---|---|---|
| Unsigned | - | Not enabled | Not enabled | Succeeds | Yes |
| Not enabled | Enabled | Fails | - | ||
| Enabled | - | Fails | - | ||
| Signed | No | Not enabled | Not enabled | Succeeds | Yes |
| Not enabled | Enabled | Fails | - | ||
| Enabled | - | Fails | - | ||
| Signed | Yes | Not enabled | Not enabled | Succeeds | No |
| Not enabled | Enabled | Succeeds | No | ||
| Enabled | - | Succeeds | No |
23.5. Sources for public keys
Review the sources of X.509 keys that the kernel loads into system keyrings during boot. The kernel uses these keys, derived from persistent stores like the UEFI database and the Machine Owner Key (MOK) list, to verify the integrity of modules and binaries.
-
The system keyring (
.builtin_trusted_keys) -
The
.platformkeyring -
The system
.blacklistkeyring
| Source of X.509 keys | User can add keys | UEFI Secure Boot state | Keys loaded during boot |
|---|---|---|---|
| Embedded in kernel | No | - |
|
|
UEFI | Limited | Not enabled | No |
| Enabled |
| ||
|
Embedded in the | No | Not enabled | No |
| Enabled |
| ||
| Machine Owner Key (MOK) list | Yes | Not enabled | No |
| Enabled |
|
.builtin_trusted_keys- A keyring that is built on boot.
- Provides trusted public keys.
-
rootprivileges are required to view the keys.
.platform- A keyring that is built on boot.
- Provides keys from third-party platform providers and custom public keys.
-
rootprivileges are required to view the keys.
.blacklist- A keyring with X.509 keys which have been revoked.
-
A module signed by a key from
.blacklistwill fail authentication even if your public key is in.builtin_trusted_keys. -
rootprivileges are required to view the keys.
- UEFI Secure Boot
db - A signature database.
- Stores keys (hashes) of UEFI applications, UEFI drivers, and boot loaders.
- The keys can be loaded on the machine.
- UEFI Secure Boot
dbx - A revoked signature database.
- Prevents keys from getting loaded.
-
The revoked keys from this database are added to the
.blacklistkeyring.
23.6. Generating a public and private key pair
To use a custom kernel or modules on a Secure Boot system, generate an X.509 key pair. Sign the kernel or modules with the private key, and enroll the public key in the Machine Owner Key (MOK) list for validation.
Prerequisites
- You have root permissions on the system.
Procedure
Create an X.509 public and private key pair.
If you only want to sign custom kernel modules:
# efikeygen --dbdir /etc/pki/pesign \ --self-sign \ --module \ --common-name 'CN=Organization signing key' \ --nickname 'Custom Secure Boot key'If you want to sign custom kernel:
# efikeygen --dbdir /etc/pki/pesign \ --self-sign \ --kernel \ --common-name 'CN=Organization signing key' \ --nickname 'Custom Secure Boot key'When the RHEL system is running FIPS mode:
# efikeygen --dbdir /etc/pki/pesign \ --self-sign \ --kernel \ --common-name 'CN=Organization signing key' \ --nickname 'Custom Secure Boot key' \ --token 'NSS FIPS 140-2 Certificate DB'NoteIn FIPS mode, you must use the
--tokenoption so thatefikeygenfinds the default "NSS Certificate DB" token in the PKI database.The public and private keys are now stored in the
/etc/pki/pesign/directory. See theopenssl(1)man page on your system for more information.ImportantIt is a good security practice to sign the kernel and the kernel modules within the validity period of its signing key. However, the
sign-fileutility does not warn you and the key will be usable in Red Hat Enterprise Linux 10 regardless of the validity dates.
23.7. Example output of system keyrings
You can display information about the keys on the system keyrings using the keyctl utility from the keyutils package.
- Keyrings output
The following is a shortened example output of
.builtin_trusted_keys,.platform, and.blacklistkeyrings from a Red Hat Enterprise Linux 10 system where UEFI Secure Boot is enabled.# keyctl list %:.builtin_trusted_keys6 keys in keyring: ...asymmetric: Red Hat Enterprise Linux Driver Update Program (key 3): bf57f3e87... ...asymmetric: Red Hat Secure Boot (CA key 1): 4016841644ce3a810408050766e8f8a29... ...asymmetric: Microsoft Corporation UEFI CA 2011: 13adbf4309bd82709c8cd54f316ed... ...asymmetric: Microsoft Windows Production PCA 2011: a92902398e16c49778cd90f99e... ...asymmetric: Red Hat Enterprise Linux kernel signing key: 4249689eefc77e95880b... ...asymmetric: Red Hat Enterprise Linux kpatch signing key: 4d38fd864ebe18c5f0b7...# keyctl list %:.platform4 keys in keyring: ...asymmetric: VMware, Inc.: 4ad8da0472073... ...asymmetric: Red Hat Secure Boot CA 5: cc6fafe72... ...asymmetric: Microsoft Windows Production PCA 2011: a929f298e1... ...asymmetric: Microsoft Corporation UEFI CA 2011: 13adbf4e0bd82...# keyctl list %:.blacklist4 keys in keyring: ...blacklist: bin:f5ff83a... ...blacklist: bin:0dfdbec... ...blacklist: bin:38f1d22... ...blacklist: bin:51f831f...The
.builtin_trusted_keyskeyring in the example shows the addition of two keys from the UEFI Secure Bootdbkeys and theRed Hat Secure Boot (CA key 1), which is embedded in theshimboot loader.- Kernel console output
The following example shows the kernel console output. The messages identify the keys with an UEFI Secure Boot related source. These include UEFI Secure Boot
db, embeddedshim, and MOK list.# dmesg | grep -E 'integrity.*cert'[1.512966] integrity: Loading X.509 certificate: UEFI:db [1.513027] integrity: Loaded X.509 cert 'Microsoft Windows Production PCA 2011: a929023... [1.513028] integrity: Loading X.509 certificate: UEFI:db [1.513057] integrity: Loaded X.509 cert 'Microsoft Corporation UEFI CA 2011: 13adbf4309... [1.513298] integrity: Loading X.509 certificate: UEFI:MokListRT (MOKvar table) [1.513549] integrity: Loaded X.509 cert 'Red Hat Secure Boot CA 5: cc6fa5e72868ba494e93...
See keyctl(1) and dmesg(1) man pages on your system for more information.
23.8. Enrolling public key on target system by adding the public key to the MOK list
To access the kernel or kernel modules, you must authenticate your public key. Enroll the key in the target system’s platform keyring (.platform).
On Unified Extensible Firmware Interface (UEFI) Secure Boot systems, the kernel imports keys from the db database. It does not import keys that the dbx database marks as revoked.
The Machine Owner Key (MOK) facility allows expanding the UEFI Secure Boot key database. On a UEFI-based system, you can boot RHEL 10 with Secure Boot enabled. Keys on the MOK list are then added to the platform keyring (.platform), along with keys from the Secure Boot database.
The MOK list is stored securely and persists across reboots. It is separate from the Secure Boot databases.
The MOK facility is supported by shim, MokManager, GRUB, and the mokutil utility. Together, they enable secure key management and authentication for UEFI-based systems.
To get the authentication service of your kernel module on your systems, consider requesting your system vendor to incorporate your public key into the UEFI Secure Boot key database in their factory firmware image.
Prerequisites
- You have generated a public and private key pair and know the validity dates of your public keys. For details, see Generating a public and private key pair.
Procedure
Export your public key to the
sb_cert.cerfile:# certutil -d /etc/pki/pesign \ -n 'Custom Secure Boot key' \ -Lr \ > sb_cert.cerImport your public key into the MOK list:
# mokutil --import sb_cert.cer- Enter a new password for this MOK enrollment request.
Reboot the machine.
The
shimboot loader notices the pending MOK key enrollment request and it launchesMokManager.efito enable you to complete the enrollment from the UEFI console.Choose
Enroll MOK, enter the password you previously associated with this request when prompted, and confirm the enrollment.Your public key is added to the MOK list, which is persistent.
Once a key is on the MOK list, it is automatically propagated to the
.platformkeyring on this and subsequent boots when UEFI Secure Boot is enabled.
23.9. Signing a kernel with the private key
To enhance system security on UEFI Secure Boot systems, load a kernel signed with a private key.
Prerequisites
- You have generated a public and private key pair and know the validity dates of your public keys. For details, see Generating a public and private key pair.
- You have enrolled your public key on the target system. For details, see Enrolling public key on target system by adding the public key to the MOK list.
- You have a kernel image in the ELF format available for signing.
Procedure
On the x64 architecture:
Create a signed image:
# pesign --certificate 'Custom Secure Boot key' \ --in vmlinuz-version \ --sign \ --out vmlinuz-version.signedReplace
versionwith the version suffix of yourvmlinuzfile, andCustom Secure Boot keywith the name that you chose earlier.Optional: Check the signatures:
# pesign --show-signature \ --in vmlinuz-version.signedOverwrite the unsigned image with the signed image:
# mv vmlinuz-version.signed vmlinuz-version
On the 64-bit ARM architecture:
Decompress the
vmlinuzfile:# zcat vmlinuz-version > vmlinux-versionCreate a signed image:
# pesign --certificate 'Custom Secure Boot key' \ --in vmlinux-version \ --sign \ --out vmlinux-version.signedOptional: Check the signatures:
# pesign --show-signature \ --in vmlinux-version.signedCompress the
vmlinuxfile:# gzip --to-stdout vmlinux-version.signed > vmlinuz-versionRemove the uncompressed
vmlinuxfile:# rm vmlinux-version*
23.10. Signing a GRUB build with the private key
To use a custom GRUB build on a UEFI Secure Boot system, sign it with a private key. This is required for custom builds or if the Microsoft trust anchor is removed.
Prerequisites
- You have generated a public and private key pair and know the validity dates of your public keys. For details, see Generating a public and private key pair.
- You have enrolled your public key on the target system. For details, see Enrolling public key on target system by adding the public key to the MOK list.
- You have a GRUB EFI binary available for signing.
Procedure
On the x64 architecture:
Create a signed GRUB EFI binary:
# pesign --in /boot/efi/EFI/redhat/grubx64.efi \ --out /boot/efi/EFI/redhat/grubx64.efi.signed \ --certificate 'Custom Secure Boot key' \ --signReplace
Custom Secure Boot keywith the name that you chose earlier.Optional: Check the signatures:
# pesign --in /boot/efi/EFI/redhat/grubx64.efi.signed \ --show-signatureOverwrite the unsigned binary with the signed binary:
# mv /boot/efi/EFI/redhat/grubx64.efi.signed \ /boot/efi/EFI/redhat/grubx64.efiWarningWhen overwriting the grub binary, your system might fail to boot normally and you might require reinstalling the grub from the system image.
On the 64-bit ARM architecture:
Create a signed GRUB EFI binary:
# pesign --in /boot/efi/EFI/redhat/grubaa64.efi \ --out /boot/efi/EFI/redhat/grubaa64.efi.signed \ --certificate 'Custom Secure Boot key' \ --signReplace
Custom Secure Boot keywith the name that you chose earlier.Optional: Check the signatures:
# pesign --in /boot/efi/EFI/redhat/grubaa64.efi.signed \ --show-signatureOverwrite the unsigned binary with the signed binary:
# mv /boot/efi/EFI/redhat/grubaa64.efi.signed \ /boot/efi/EFI/redhat/grubaa64.efi
23.11. Signing kernel modules with the private key
To enhance security on UEFI Secure Boot systems, load kernel modules signed with a private key.
Your signed kernel module is also loadable on systems where UEFI Secure Boot is disabled or on a non-UEFI system. As a result, you do not need to provide both, a signed and unsigned version of your kernel module.
Prerequisites
- You have generated a public and private key pair and know the validity dates of your public keys. For details, see Generating a public and private key pair.
- You have enrolled your public key on the target system. For details, see Enrolling public key on target system by adding the public key to the MOK list.
- You have a kernel module in ELF image format available for signing.
Procedure
Export your public key to the
sb_cert.cerfile:# certutil -d /etc/pki/pesign \ -n 'Custom Secure Boot key' \ -Lr \ > sb_cert.cerExtract the key from the NSS database as a PKCS #12 file:
# pk12util -o sb_cert.p12 \ -n 'Custom Secure Boot key' \ -d /etc/pki/pesign- When the previous command prompts, enter a new password that encrypts the private key.
Export the unencrypted private key:
# openssl pkcs12 \ -in sb_cert.p12 \ -out sb_cert.priv \ -nocerts \ -noencImportantKeep the unencrypted private key secure.
Sign your kernel module. The following command appends the signature directly to the ELF image in your kernel module file:
# /usr/src/kernels/$(uname -r)/scripts/sign-file \ sha256 \ sb_cert.priv \ sb_cert.cer \ my_module.koYour kernel module is now ready for loading.
ImportantIn Red Hat Enterprise Linux 10, the validity dates of the key pair matter. The key does not expire, but the kernel module must be signed within the validity period of its signing key. The
sign-fileutility will not warn you of this.For example, a key that is only valid in 2021 can be used to authenticate a kernel module signed in 2021 with that key. However, users cannot use that key to sign a kernel module in 2022.
Verification
Display information about the kernel module’s signature:
# modinfo my_module.ko | grep signersigner: Your Name KeyCheck that the signature lists your name as entered during generation.
NoteThe appended signature is not contained in an ELF image section and is not a formal part of the ELF image. Therefore, utilities such as
readelfcannot display the signature on your kernel module.Load the module:
# insmod my_module.koRemove (unload) the module:
# modprobe -r my_module.ko
23.12. Loading signed kernel modules
To load signed kernel modules, ensure your public key is enrolled in the platform keyring and Machine Owner Key (MOK) list, then use the modprobe command.
Prerequisites
- You have generated the public and private key pair. For details, see Generating a public and private key pair.
- You have enrolled the public key into the platform keyring. For details, see Enrolling public key on target system by adding the public key to the MOK list.
- You have signed a kernel module with the private key. For details, see Signing kernel modules with the private key.
Install the
kernel-modules-extrapackage, which creates the/lib/modules/$(uname -r)/extra/directory:# dnf -y install kernel-modules-extra
Procedure
Verify that your public keys are on the platform keyring:
# keyctl list %:.platformCopy the kernel module into the
extra/directory of the kernel that you want:# cp my_module.ko /lib/modules/$(uname -r)/extra/Update the modular dependency list:
# depmod -aLoad the kernel module:
# modprobe -v my_moduleOptional: To load the module on boot, add it to the
/etc/modules-loaded.d/my_module.conffile:# echo "my_module" > /etc/modules-load.d/my_module.conf
Verification
Verify that the module was successfully loaded:
# lsmod | grep my_module
Chapter 24. Updating the Secure Boot Revocation List
Update the UEFI Secure Boot Revocation List to identify software with known security issues and prevent it from compromising the boot process.
24.1. The Secure Boot Revocation List
The UEFI Secure Boot Revocation List, or the Secure Boot Forbidden Signature Database (dbx), is a list that identifies software that Secure Boot no longer allows to run.
When a security issue or a stability problem is found in software that interfaces with Secure Boot, such as in the GRUB boot loader, the Revocation List stores its hash signature. Software with such a recognized signature cannot run during boot, and the system boot fails to prevent compromising the system.
For example, a certain version of GRUB might contain a security issue that allows an attacker to bypass the Secure Boot mechanism. When the issue is found, the Revocation List adds hash signatures of all GRUB versions that contain the issue. As a result, only secure GRUB versions can boot on the system.
The Revocation List requires regular updates to recognize newly found issues. When updating the Revocation List, make sure to use a safe update method that does not cause your currently installed system to no longer boot.
24.2. Applying an online Revocation List update
To prevent known security issues, you can update the Secure Boot Revocation List on your system. This procedure is safe and ensures that the update does not prevent your system from booting.
Prerequisites
- Secure Boot is enabled on your system.
- Your system is connected to internet for updates.
Procedure
Determine the current version of the Revocation List:
# *fwupdmgr get-devices*See the
Current versionfield underUEFI dbx.Enable the LVFS Revocation List repository:
# *fwupdmgr enable-remote lvfs*Refresh the repository metadata:
# *fwupdmgr refresh*Apply the Revocation List update:
On the command line:
# *fwupdmgr update*In the graphical interface:
- Open the Software application
- Navigate to the Updates tab.
- Find the Secure Boot dbx Configuration Update entry.
- Click .
-
At the end of the update,
fwupdmgror Software asks you to reboot the system. Confirm the reboot.
Verification
After the reboot, check the current version of the Revocation List again:
# *fwupdmgr get-devices*
24.3. Applying an offline Revocation List update
To prevent known security issues on a system with no internet connection, you can update the Secure Boot Revocation List from Red Hat Enterprise Linux. This procedure is safe and ensures that the update does not prevent your system from booting.
Procedure
Identify the current version of the Revocation List:
# *fwupdmgr get-devices*See the
Current versionfield underUEFI dbx.List the updates available from RHEL:
# *ls /usr/share/dbxtool/*Select the most recent update file for your architecture. The file names use the following format:
DBXUpdate-date-architecture.cabInstall the selected update file:
# fwupdmgr install /usr/share/dbxtool/DBXUpdate-date-architecture.cab-
At the end of the update,
fwupdmgrasks you to reboot the system. Confirm the reboot.
Verification
After the reboot, check the current version of the Revocation List again:
# *fwupdmgr get-devices*
Chapter 25. Enhancing security with the kernel integrity subsystem
Use components of the kernel integrity subsystem to improve system security. Configure relevant components such as IMA signature-based appraisal and remote attestation.
25.1. The kernel integrity subsystem
The kernel integrity subsystem protects system integrity by detecting file tampering and enabling remote attestation. It includes the Integrity Measurement Architecture (IMA) and the Extended Verification Module (EVM).
- Integrity Measurement Architecture (IMA)
IMA maintains the integrity of file content. It includes three features that you can enable through an IMA policy:
-
IMA-Measurement: Collect the file content hash or signature and store the measurements in the kernel. If a TPM is available, each measurement extends a TPM PCR, which enables remote attestation with an attestation quote. -
IMA-Appraisal: Verify file integrity by comparing the calculated file hash with a known good reference value or by verifying a signature stored in the security.ima attribute. If verification fails, the system denies access. -
IMA-Audit: Store the calculated file content hash or signature in the system audit log.
-
- Extended Verification Module (EVM)
-
The EVM protects file metadata, including extended attributes related to system security such as
security.imaandsecurity.selinux. EVM stores a reference hash or HMAC for these security attributes insecurity.evmand uses it to detect if the file metadata has been changed maliciously.
25.2. Enabling kernel’s runtime integrity monitoring through IMA-signature based appraisal
To ensure only authorized package files are executed, enable signature-based IMA appraisal by running the ima-setup command with the sample policy. From RHEL 9, all package files are signed per file.
Procedure
Run
ima-setupto enable signature-based IMA appraisal:# ima-setup --policy=/usr/share/ima/policies/01-appraise-executable-and-lib-signaturesThis command:
-
Stores package file signature in
security.imafor all installed packages. -
Includes the
dracutintegrity module to load the IMA code signing key to kernel. -
Copies the policy to
/etc/ima/ima-policyso systemd loads it at boot time.
-
Stores package file signature in
Verification
-
The
ipcommand can be successfully executed. If
ipis copied to/tmp, by default, it loses itssecurity.imaand thereforeipcommand is not executed.# cp /usr/sbin/ip /tmp # /tmp/ipbash: /tmp/ip: Permission denied# /tmp/ip doesn't have security.ima # getfattr -m security.ima -d /tmp/ip # whereas /usr/sbin/ip has # getfattr -m security.ima /usr/sbin/ip # file: usr/sbin/ipsecurity.ima=0sAwIE0zIESQBnMGUCMQCLXZ7ukyDcguLgPYwzXU16dcVrmlHxOta7vm7EUfX07Nf0xnP1MyE//AZaqeNIKBoCMFHNDOuA4uNvS+8OOAy7YEn8oathfsF2wsDSZi+NAoumC6RFqIB912zkRKxraSX8sA==
If the sample policy 01-appraise-executable-and-lib-signatures does not meet your requirements, you can create and use a custom policy.
25.3. Enabling remote attestation with IMA measurement
To verify system integrity by using remote attestation tools such as Keylime, you must enable Integrity Measurement Architecture (IMA) measurement. A signed sample measurement policy is available at /usr/share/ima/policies/02-keylime-remote-attestation. Deploy and run the policy that meets your requirements.
Prerequisites
-
A signed measurement policy is available at
/usr/share/ima/policies/02-keylime-remote-attestation.
Procedure
Install the
rpm-plugin-imapackage:# dnf install rpm-plugin-imaReinstall the
ima-evm-utilspackage so that the sample policies have IMA signatures stored in extended attributes:# dnf reinstall ima-evm-utilsConfirm that the IMA signature has been stored:
# evmctl ima_verify -k /etc/keys/ima/redhatimarelease-10.der /usr/share/ima/policies/02-keylime-remote-attestationkeyid d3320449 (from /etc/keys/ima/redhatimarelease-10.der) key 1: d3320449 /etc/keys/ima/redhatimarelease-10.der /usr/share/ima/policies/02-keylime-remote-attestation: verification is OKCopy the signed measurement policy with extended attributes preserved to
/etc/ima/ima-policyso systemd automatically loads it on boot:# cp --preserve=xattr /usr/share/ima/policies/02-keylime-remote-attestation /etc/ima/ima-policyEnable the dracut integrity module so the IMA key loads at boot time:
# cp --preserve=xattr /usr/share/ima/dracut-98-integrity.conf /etc/dracut.conf.d/ima.confRegenerate the initramfs to include the
integritymodule:# dracut -fOn
s390xsystems, additionally runziplto apply the changes for the next IPL (initial program load):# zipl
Reboot to load the IMA key:
# systemctl rebootWarningOn systems with Secure Boot enabled, the kernel does not accept unsigned IMA policies. If you load a policy before the IMA code-signing key is available to the kernel, the load fails and the next reboot can hang. Therefore, you must load the policy after the key is available.
If the sample policy does not meet your requirements, see Loading an IMA policy signed by your custom IMA key.
Verification
Verify that the policy is loaded:
# cat /sys/kernel/security/integrity/ima/policy
Chapter 26. Extending, customizing, and troubleshooting kernel integrity subsystem
Extend, customize, and troubleshoot the kernel integrity subsystem to meet specific security requirements in different operational environments.
26.1. Generate good reference values for IMA appraisal
Before you deploy an Integrity Measurement Architecture (IMA) policy that includes IMA-appraisal rules, ensure that all files governed by these rules have valid reference values stored in the security.ima extended attribute. If these reference values are missing, IMA might prevent the system from booting properly or deny access to files.
# ima-appraise-file </path/to/file>26.1.1. Adding IMA signatures as good references for immutable files
To support integrity verification, you can use IMA signatures as trusted reference values for immutable files. This approach helps ensure that only files with valid signatures are accessed, which strengthens system security and compliance.
Prerequisites
- You have created an IMA policy that includes IMA-appraisal rules.
Procedure
Install the
rpm-plugin-ima:$ sudo dnf install rpm-plugin-ima -yqThis ensures that package files have IMA signature stored in
security.xattrautomatically during package installation, reinstallation, or upgradation.Reinstall all the packages:
$ sudo dnf reinstall "*" -yThis ensures that the
security.xattrextended attribute is updated for all packages.Enable the dracut integrity module so the official IMA code-signing key in
/etc/keys/imaloads automatically on boot:$ sudo dracut -f
Verification
Verify that signature is correctly stored in
security.imaextended attribute:$ # evmctl ima_verify -k /etc/keys/ima/redhatimarelease-10.der /usr/lib/systemd/systemdkeyid d3320449 (from /etc/keys/ima/redhatimarelease-10.der) key 1: d3320449 /etc/keys/ima/redhatimarelease-10.der /usr/lib/systemd/systemd: verification is OK$ # evmctl ima_verify -k /etc/keys/ima/redhatimarelease-10.der /bin/bashkeyid d3320449 (from /etc/keys/ima/redhatimarelease-10.der) key 1: d3320449 /etc/keys/ima/redhatimarelease-10.der /bin/bash: verification is OK ...
26.1.2. Generating good reference values for mutable files
To maintain integrity for files that might change over time, generate and update reference values as needed. This ensures that the system accurately verifies the authenticity of mutable files and prevent unauthorized modifications.
Prerequisites
- You have root privileges on the system.
- You have created an IMA policy that includes IMA-appraisal rules.
- You have generated good reference values for IMA appraisal.
- Secure Boot is disabled.
Procedure
Optional: Enable your chosen IMA-appraisal policy or skip this step if you only use your custom policy. Take built-in
ima_policy=appraise_tcbas an example:# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="ima_policy=appraise_tcb"Additionally for
s390xsystems:# zipl
Enable IMA-appraisal fix mode by adding the
ima_appraise=fixkernel command line parameter:# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="ima_appraise=fix"Additionally for
s390xsystems:# zipl
Reboot the system:
# rebootOptional: Load your custom IMA policy:
# echo <path_to_your_custom_ima_policy> > /sys/kernel/security/ima/policyRe-label the whole system:
# find / -fstype xfs -type f -uid 0 -exec head -c 0 '{}' \;Turn off IMA-appraisal fix mode by removing the
ima_appraise=fixkernel command line parameter:# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --remove-args="ima_appraise=fix"Additionally for
s390xsystems:# zipl
- Enable the secure boot if it is disabled.
Additional resources
26.2. Writing custom IMA policy
If the built-in IMA policies that you enable with kernel command line parameters, such as ima_policy=tcb or ima_policy=critical_data, or the sample policies in /usr/share/ima/policies/ do not meet your requirements, you can create custom IMA policy rules. When systemd loads a policy from /etc/ima/ima-policy, it replaces the built-in IMA policy.
After you define your IMA policy, generate good reference values if the policy includes IMA-appraisal rules before you deploy it. If your policy does not include IMA-appraisal rules, you can verify the policy by running echo /PATH-TO-YOUR-DRAFT-IMA-POLICY > /sys/kernel/security/integrity/ima/policy. This approach helps prevent system boot failures.
Procedure
Review the rule format and an example policy.
An IMA policy rule uses the format
action [condition …]to specify an action that is triggered under certain conditions. For example, the sample policy in/usr/share/ima/policies/01-appraise-executable-and-lib-signaturesincludes the following rules:# Skip some unsupported filesystems # For a list of these filesystems, see # https://www.kernel.org/doc/Documentation/ABI/testing/ima_policy # PROC_SUPER_MAGIC dont_appraise fsmagic=0x9fa0 … appraise func=BPRM_CHECK appraise_type=imasigThe first rule,
dont_appraise fsmagic=0x9fa0, instructs IMA to skip appraising files in thePROC_SUPER_MAGICfilesystem. The last rule,appraise func=BPRM_CHECK appraise_type=imasig, enforces signature verification when a file is executed.
26.3. Creating custom IMA keys by using OpenSSL
To secure your code, use OpenSSL to generate a Certificate Signing Request (CSR) for your digital certificates.
The kernel searches the .ima keyring for a code signing key to verify an IMA signature. Before you add a code signing key to the .ima keyring, you need to ensure that IMA CA key signed this key in the .builtin_trusted_keys or .secondary_trusted_keys keyrings.
Prerequisites
The custom IMA CA key has the following extensions:
- The basic constraints extension with the CA boolean asserted.
-
The
KeyUsageextension with thekeyCertSignbit asserted but without thedigitalSignatureasserted.
The custom IMA code signing key falls under the following criteria:
- The IMA CA key signed this custom IMA code signing key.
-
The custom key includes the
subjectKeyIdentifierextension.
-
UEFI Secure Boot on
x86_64oraarch64systems or PowerVM Secure Boot onppc64lesystems is enabled.
Procedure
To generate a custom IMA CA key pair, run:
# openssl req -new -x509 -utf8 -sha256 -days 3650 -batch -config ima_ca.conf -outform DER -out custom_ima_ca.der -keyout custom_ima_ca.privOptional: To check the content of the
ima_ca.conffile, run:# cat ima_ca.conf [ req ] default_bits = 2048 distinguished_name = req_distinguished_name prompt = no string_mask = utf8only x509_extensions = ca [ req_distinguished_name ] O = YOUR_ORG CN = YOUR_COMMON_NAME IMA CA emailAddress = YOUR_EMAIL [ ca ] basicConstraints=critical,CA:TRUE subjectKeyIdentifier=hash authorityKeyIdentifier=keyid:always,issuer keyUsage=critical,keyCertSign,cRLSignTo generate a private key and a certificate signing request (CSR) for the IMA code signing key, run:
# openssl req -new -utf8 -sha256 -days 365 -batch -config ima.conf -out custom_ima.csr -keyout custom_ima.privOptional: To check the content of the
ima.conffile, run:# cat ima.conf [ req ] default_bits = 2048 distinguished_name = req_distinguished_name prompt = no string_mask = utf8only x509_extensions = code_signing [ req_distinguished_name ] O = YOUR_ORG CN = YOUR_COMMON_NAME IMA signing key emailAddress = YOUR_EMAIL [ code_signing ] basicConstraints=critical,CA:FALSE keyUsage=digitalSignature subjectKeyIdentifier=hash authorityKeyIdentifier=keyid:always,issuerUse the IMA CA private key to sign the CSR to create the IMA code signing certificate:
# openssl x509 -req -in custom_ima.csr -days 365 -extfile ima.conf -extensions code_signing -CA custom_ima_ca.der -CAkey custom_ima_ca.priv -CAcreateserial -outform DER -out ima.der
26.4. Loading an IMA policy signed by your custom IMA key
To maintain your system integrity and meet the security requirements for your organization, you can load an Integrity Measurement Architecture (IMA) policy that is signed with your own custom IMA key. This approach ensures that only trusted, authenticated policies are applied during system startup or runtime.
This procedure applies only to x86_64 and aarch64 systems with UEFI Secure Boot enabled, and to ppc64le systems running PowerVM Secure Boot.
Prerequisites
- You must have root privileges on your system.
-
UEFI Secure Boot is enabled for Red Hat Enterprise Linux or the kernel is booted with the
ima_policy=secure_bootparameter to ensure only signed IMA policy can be loaded. - The custom IMA CA key has been added to the MOK list. For more information, see Enrolling public key on target system by adding the public key to the MOK list.
- The kernel version is 5.14 or later.
- Good reference values have been generated for the IMA policy. For more information, see Generate good reference values for IMA appraisal.
Procedure
Add your custom IMA code signing key to the
.imakeyring:# keyctl padd asymmetric <KEY_SUBJECT> %:.ima < <PATH_TO_YOUR_CUSTOM_IMA_KEY>Prepare your IMA policy and sign it with your custom IMA code signing key:
# evmctl ima_sign <PATH_TO_YOUR_CUSTOM_IMA_POLICY> -k <PATH_TO_YOUR_CUSTOM_IMA_KEY>Load the signed IMA policy:
# echo <PATH_TO_YOUR_CUSTOM_SIGNED_IMA_POLICY> > /sys/kernel/security/ima/policyVerify that the policy loaded successfully:
# *echo $?*00indicates that the IMA policy was loaded successfully. If the command returns a nonzero value, the IMA policy was not loaded successfully.
WarningDo not skip this step. If you do, your system might fail to boot and you need to recover your system.
If the IMA policy fails to load, repeat the steps 2 and 3 to fix the issue.
Copy the signed IMA policy to
/etc/ima/ima-policyto enable systemd load it automatically on boot:# cp --preserve=xattr <PATH_TO_YOUR_CUSTOM_IMA_POLICY> /etc/ima/ima-policyCopy your custom IMA key to the
/etc/keys/ima/directory:# cp <PATH_TO_YOUR_CUSTOM_IMA_KEY> /etc/keys/ima/Copy the
dracutintegrity configuration file:# *cp --preserve=xattr /usr/share/ima/dracut-98-integrity.conf /etc/dracut.conf.d/98-integrity.conf*Rebuild the initial RAM disk:
# *dracut -f*Additionally for
s390xsystems:# zipl
Verification
Verify that the IMA policy is loaded successfully:
# cat /sys/kernel/security/ima/policyThe output should include the rules from your custom IMA policy.
26.5. Troubleshooting systemd failure to load the IMA policy
When systemd does not load /etc/ima/ima-policy, the system hangs with a systemd[1]: Freezing execution error message.
The failure can appear as follows:
[ 5.829882] ima: policy update failed
[ 5.830094] ima: signed policy file (specified as an absolute pathname) required
[!!!!!!] Failed to load IMA policy.
…
[ 5.859994] systemd[1]: Freezing execution.There are three methods that you can use to recover your system:
- Turn off Secure Boot: Use this method if the error indicates a missing signature on a UEFI system.
-
Booting with
init=/bin/bash: Use this method to open a shell and fix the policy file. -
Booting with
initcall_blacklist=init_ima: Use this method to start the system with IMA disabled.
26.5.1. Turn off Secure Boot
If a policy is not signed, the kernel prevents it from loading and logs specific error messages.
[ 5.661906] ima: policy update failed
[ 5.662290] ima: signed policy file (specified as an absolute pathname) required
[ 5.662496] systemd[1]: Failed to load the IMA custom policy file /etc/ima/ima-policy1: Permission denied
[ 5.662663] ima: policy update failed
[ 5.662856] audit: type=1800 audit(1744968172.925:7): pid=1 uid=0 auid=4294967295 ses=4294967295 subj=system_u:system_r:init_t:s0 op=appraise_data cause=IMA-signature-required comm="systemd" name="/etc/ima/ima-policy" dev="vda3" ino=25679834 res=0 errno=0
[ 5.663205] audit: type=1802 audit(1744968172.925:8): pid=1 uid=0 auid=4294967295 ses=4294967295 subj=system_u:system_r:init_t:s0 op=policy_update cause=failed comm="systemd" res=0 errno=0
[!!!!!!] Failed to load IMA policy.As a workaround, you can turn off Secure Boot temporarily and follow Loading an IMA policy signed by your custom IMA key to fix the issue.
26.5.2. Booting the system with the init=/bin/bash kernel parameter
To start the system with the init=/bin/bash kernel parameter, add it to the boot loader entry and run the required commands in the recovery shell. You can then correct and verify the IMA policy before rebooting normally.
Procedure
Modify the boot loader entry and add the
init=/bin/bashkernel parameter.# grubby --update-kernel="$(grubby --default-kernel)" --args="init=/bin/bash"After you access the shell, remount the system with write permissions:
# mount -o remount,rw /Rename
/etc/ima/ima-policyto/etc/ima/ima-policy.bak:# mv /etc/ima/ima-policy /etc/ima/ima-policy.bakEnable the
SysRqmagic key:# echo 1 > /proc/sys/kernel/sysrqReboot the system:
# printf "s\nb" > /proc/sysrq-triggerResolve any issues in
/etc/ima/ima-policy.bakand verify that the policy can be loaded:# echo /etc/ima/ima-policy.bak >> /sys/kernel/security/integrity/ima/policyRename
/etc/ima/ima-policy.bakto/etc/ima/ima-policy:# mv /etc/ima/ima-policy.bak /etc/ima/ima-policy
26.5.3. Booting the system with the initcall_blacklist=init_ima kernel parameter
To start the system with the initcall_blacklist=init_ima kernel parameter when the system hangs with systemd[1]: Freezing execution, add the parameter to the boot loader entry and run the required commands. You can then correct and verify the IMA policy before rebooting normally.
Procedure
Modify the boot loader entry and add the
initcall_blacklist=init_imakernel parameter.# grubby --update-kernel="$(grubby --default-kernel)" --args="initcall_blacklist=init_ima"Rename
/etc/ima/ima-policyto/etc/ima/ima-policy.bak:# mv /etc/ima/ima-policy /etc/ima/ima-policy.bakReboot the system:
# systemctl rebootResolve any issues in
/etc/ima/ima-policy.bakand verify that the policy can be loaded:# echo /etc/ima/ima-policy.bak >> /sys/kernel/security/integrity/ima/policyRename
/etc/ima/ima-policy.bakto/etc/ima/ima-policy:# mv /etc/ima/ima-policy.bak /etc/ima/ima-policy
26.6. Signing custom built packages
To maintain the integrity of your system, it is important to sign custom built packages before deployment. With the rpm-sign tool and IMA code signing key, you can sign your custom built packages.
Prerequisites
- You have root privileges on your system.
- You have a custom built package that you want to sign.
- You have the IMA code signing key.
-
You have the
rpm-signtool installed. - Custom IMA keys are created. See Creating custom IMA keys by using OpenSSL.
Procedure
Use
rpmsign –signfilesto sign package files:# rpmsign --define "gpg_name _<GPG_KEY_NAME>" --addsign --signfiles --fskpass --fskpath=<PATH_TO_YOUR_PRIVATE_IMA_CODE_SIGNING_KEY> <PATH_TO_YOUR_RPM>--define "gpg_name _<GPG_KEY_NAME>"- The GPG key signs the package, and the IMA code signing key signs each file in the package.
--addsign- Adds the signature to the package.
--signfiles- Signs each file in the package.
--fskpass- Avoids repeatedly entering the password for the IMA code signing key.
--fskpath- Specifies the path to the IMA code signing key.
Verification
To verify that the package is signed, you can use the following command:
# rpm -q --queryformat "[%{FILENAMES} %{FILESIGNATURES}\n] <PATH_TO_YOUR_RPM>"/usr/bin/YOUR_BIN 030204... /usr/lib/YOUR_LIB.so 030204... ...
26.7. Selecting between IMA and fapolicyd
IMA and fapolicyd are two different tools for enforcing file integrity. IMA is a kernel module that enforces file integrity by verifying the integrity of files at boot time. fapolicyd is a daemon that enforces file integrity by verifying the integrity of files at runtime.
The following list can help you determine which tool meets your requirements:
-
IMA verifies digital signatures to ensure integrity, while
fapolicydcurrently supports only hash-based verification. -
IMA operates in kernel space, while
fapolicydoperates in user space. -
fapolicydsupports basic integrity verification by checking file size and can also verify reference hash values stored insecurity.ima. -
IMA and
fapolicyduse different policy syntax. For example,fapolicydsupports path-based policies, but IMA does not.
Chapter 27. Using systemd to manage resources used by applications
Red Hat Enterprise Linux 10 binds cgroup hierarchies to the systemd unit tree, which moves resource management from the process level to the application level. You can manage system resources by using the systemctl command or by modifying systemd unit files. The systemd system and service manager applies configuration options to process groups by using kernel system calls, cgroups, and namespaces.
You can review the full set of configuration options for systemd in the following manual pages:
-
systemd.resource-control(5) -
systemd.exec(5)
27.1. Role of systemd in resource management
The systemd system and service manager provides service management, supervision, and resource management capabilities for system services and applications.
The systemd system and service manager:
- ensures that managed services start at the right time and in the correct order during the boot process.
- ensures that managed services run smoothly to use the underlying hardware platform optimally.
- provides capabilities to define resource management policies.
- provides capabilities to tune various options, which can improve the performance of the service.
In general, it is advisable to you use systemd for controlling the usage of system resources. You must not manually configure the cgroups virtual file system unless it is a special case.
27.2. Distribution models of system sources
To control system resource usage, apply distribution models such as weights, limits, and protections. These settings determine how resources like CPU and memory are shared among control groups (cgroups).
Distribution models of system sources include the following options:
- Weights
You can distribute the resource by adding up the weights of all sub-groups and giving each sub-group the fraction matching its ratio against the sum.
For example, if you have 10 cgroups, each with weight of value 100, the sum is 1000. Each cgroup receives one tenth of the resource.
Weight is usually used to distribute stateless resources. For example the CPUWeight= option is an implementation of this resource distribution model.
- Limits
A cgroup can consume up to the configured amount of the resource. The sum of sub-group limits can exceed the limit of the parent cgroup. Therefore it is possible to overcommit resources in this model.
For example the MemoryMax= option is an implementation of this resource distribution model.
- Protections
You can set up a protected amount of a resource for a cgroup. If the resource usage is below the protection boundary, the kernel will try not to penalize this cgroup in favor of other cgroups that compete for the same resource. An overcommit is also possible.
For example the MemoryLow= option is an implementation of this resource distribution model.
- Allocations
- Exclusive allocations of an absolute amount of a finite resource. An overcommit is not possible. An example of this resource type in Linux is the real-time budget.
- unit file option
A setting for resource control configuration.
For example, you can configure CPU resource with options such as CPUAccounting=, or CPUQuota=. Similarly, you can configure memory or I/O resources with options such as AllowedMemoryNodes= and IOAccounting=.
27.3. Allocating system resources using systemd
Allocating system resources by using systemd involves creating and managing systemd services and units. This can be configured to start, stop, or restart at specific times or in response to certain system events. You can either change the value of the unit file option of your service, or use the systemctl command.
Procedure
By using the
systemctlcommand.Check the assigned values for the service of your choice:
# systemctl show --property <unit file option> <service name>Set the required value of the CPU time allocation policy option:
# systemctl set-property <service name> <unit file option>=<value>See
systemd.resource-control(5)andsystemd.exec(5)man pages for more information.
Verification
Check the newly assigned values for the service of your choice:
# systemctl show --property <unit file option> <service name>
27.4. Overview of systemd hierarchy for cgroups
Systemd organizes processes in control groups by using slice, scope, and service units. You can modify this hierarchy by creating custom unit files or by using systemctl. Systemd automatically mounts controller hierarchies at /sys/fs/cgroup/.
For resource control, you can use the following three systemd unit types:
- Service
A process or a group of processes, which systemd started according to a unit configuration file.
Services encapsulate the specified processes so that they can be started and stopped as one set. Services are named in the following way:
<name>.service- Scope
A group of externally created processes. Scopes encapsulate processes that are started and stopped by the arbitrary processes through the
fork()function and then registered by systemd at runtime. For example, user sessions, containers, and virtual machines are treated as scopes. Scopes are named as follows:<name>.scope- Slice
A group of hierarchically organized units. Slices organize a hierarchy in which scopes and services are placed.
The actual processes are contained in scopes or in services. Every name of a slice unit corresponds to the path to a location in the hierarchy.
The dash (
-) character acts as a separator of the path components to a slice from the-.sliceroot slice. In the following example:<parent-name>.sliceparent-name.sliceis a sub-slice ofparent.slice, which is a sub-slice of the-.sliceroot slice.parent-name.slicecan have its own sub-slice namedparent-name-name2.slice, and so on.
The service, the scope, and the slice units directly map to objects in the control group hierarchy. When these units are activated, they map directly to control group paths built from the unit names.
The following is an abbreviated example of a control group hierarchy:
Control group /:
-.slice
├─user.slice
│ ├─user-42.slice
│ │ ├─session-c1.scope
│ │ │ ├─ 967 gdm-session-worker [pam/gdm-launch-environment]
│ │ │ ├─1035 /usr/libexec/gdm-x-session gnome-session --autostart /usr/share/gdm/greeter/autostart
│ │ │ ├─1054 /usr/libexec/Xorg vt1 -displayfd 3 -auth /run/user/42/gdm/Xauthority -background none -noreset -keeptty -verbose 3
│ │ │ ├─1212 /usr/libexec/gnome-session-binary --autostart /usr/share/gdm/greeter/autostart
│ │ │ ├─1369 /usr/bin/gnome-shell
│ │ │ ├─1732 ibus-daemon --xim --panel disable
│ │ │ ├─1752 /usr/libexec/ibus-dconf
│ │ │ ├─1762 /usr/libexec/ibus-x11 --kill-daemon
│ │ │ ├─1912 /usr/libexec/gsd-xsettings
│ │ │ ├─1917 /usr/libexec/gsd-a11y-settings
│ │ │ ├─1920 /usr/libexec/gsd-clipboard
…
├─init.scope
│ └─1 /usr/lib/systemd/systemd --switched-root --system --deserialize 18
└─system.slice
├─rngd.service
│ └─800 /sbin/rngd -f
├─systemd-udevd.service
│ └─659 /usr/lib/systemd/systemd-udevd
├─chronyd.service
│ └─823 /usr/sbin/chronyd
├─auditd.service
│ ├─761 /sbin/auditd
│ └─763 /usr/sbin/sedispatch
├─accounts-daemon.service
│ └─876 /usr/libexec/accounts-daemon
├─example.service
│ ├─ 929 /bin/bash /home/jdoe/example.sh
│ └─4902 sleep 1
…This example shows that services and scopes contain processes and are placed in slices that do not contain processes of their own.
27.5. Listing systemd units
To list systemd units, use the system and service manager commands.
Procedure
List all active units on the system with the
systemctlutility. The terminal returns an output similar to the following example:# systemctlUNIT LOAD ACTIVE SUB DESCRIPTION ... init.scope loaded active running System and Service Manager session-2.scope loaded active running Session 2 of user jdoe abrt-ccpp.service loaded active exited Install ABRT coredump hook abrt-oops.service loaded active running ABRT kernel log watcher abrt-vmcore.service loaded active exited Harvest vmcores for ABRT abrt-xorg.service loaded active running ABRT Xorg log watcher ... -.slice loaded active active Root Slice machine.slice loaded active active Virtual Machine and Container Slice system-getty.slice loaded active active system-getty.slice system-lvm2\x2dpvscan.slice loaded active active system-lvm2\x2dpvscan.slice system-sshd\x2dkeygen.slice loaded active active system-sshd\x2dkeygen.slice system-systemd\x2dhibernate\x2dresume.slice loaded active active system-systemd\x2dhibernate\x2dresume> system-user\x2druntime\x2ddir.slice loaded active active system-user\x2druntime\x2ddir.slice system.slice loaded active active System Slice user-1000.slice loaded active active User Slice of UID 1000 user-42.slice loaded active active User Slice of UID 42 user.slice loaded active active User and Session Slice ...UNIT- A name of a unit that also reflects the unit position in a control group hierarchy. The units relevant for resource control are a slice, a scope, and a service.
LOAD- Indicates whether the unit configuration file was properly loaded. If the unit file failed to load, the field provides the state error instead of loaded. Other unit load states are: stub, merged, and masked.
ACTIVE-
The high-level unit activation state, which is a generalization of
SUB. SUB- The low-level unit activation state. The range of possible values depends on the unit type.
DESCRIPTION- The description of the unit content and functionality.
List all active and inactive units:
# systemctl --allLimit the amount of information in the output:
# systemctl --type service,maskedThe
--typeoption requires a comma-separated list of unit types such as a service and a slice, or unit load states such as loaded and masked.See
systemd.resource-control(5)andsystemd.exec(5)man pages on your system for more information.
27.6. Viewing systemd cgroups hierarchy
Display control groups (cgroups) hierarchy and processes running in specific cgroups.
Procedure
Display the whole cgroups hierarchy on your system with the
systemd-cglscommand.# systemd-cglsControl group /: -.slice ├─user.slice │ ├─user-42.slice │ │ ├─session-c1.scope │ │ │ ├─ 965 gdm-session-worker [pam/gdm-launch-environment] │ │ │ ├─1040 /usr/libexec/gdm-x-session gnome-session --autostart /usr/share/gdm/greeter/autostart ... ├─init.scope │ └─1 /usr/lib/systemd/systemd --switched-root --system --deserialize 18 └─system.slice ... ├─example.service │ ├─6882 /bin/bash /home/jdoe/example.sh │ └─6902 sleep 1 ├─systemd-journald.service └─629 /usr/lib/systemd/systemd-journald ...The example output returns the entire cgroups hierarchy, where the highest level is formed by slices.
Display the cgroups hierarchy filtered by a resource controller with the
systemd-cgls <resource_controller>command.# systemd-cgls memoryController memory; Control group /: ├─1 /usr/lib/systemd/systemd --switched-root --system --deserialize 18 ├─user.slice │ ├─user-42.slice │ │ ├─session-c1.scope │ │ │ ├─ 965 gdm-session-worker [pam/gdm-launch-environment] ... └─system.slice | ... ├─chronyd.service │ └─844 /usr/sbin/chronyd ├─example.service │ ├─8914 /bin/bash /home/jdoe/example.sh │ └─8916 sleep 1 ...The example output lists the services that interact with the selected controller.
Display detailed information about a certain unit and its part of the cgroups hierarchy with the
systemctl status <system_unit>command.# systemctl status example.service● example.service - My example service Loaded: loaded (/usr/lib/systemd/system/example.service; enabled; vendor preset: disabled) Active: active (running) since Tue 2019-04-16 12:12:39 CEST; 3s ago Main PID: 17737 (bash) Tasks: 2 (limit: 11522) Memory: 496.0K (limit: 1.5M) CGroup: /system.slice/example.service ├─17737 /bin/bash /home/jdoe/example.sh └─17743 sleep 1 Apr 16 12:12:39 redhat systemd[1]: Started My example service. Apr 16 12:12:39 redhat bash[17737]: The current time is Tue Apr 16 12:12:39 CEST 2019 Apr 16 12:12:40 redhat bash[17737]: The current time is Tue Apr 16 12:12:40 CEST 2019
27.7. Viewing cgroups of processes
A process belongs to a control group (cgroup). Its cgroup path is recorded in /proc/PID/cgroup, and controllers plus controller-specific configuration files appear under the matching path in /sys/fs/cgroup/.
Procedure
To view which cgroup a process belongs to, run the # cat /proc/<PID>/cgroup command:
# cat /proc/2467/cgroup0::/system.slice/example.serviceThe example output relates to a process of interest. In this case, it is a process identified by
PID 2467, which belongs to theexample.serviceunit. You can check if the process was placed in a correct control group as defined by the systemd unit file specifications.Display which controllers the cgroup uses:
# cat /sys/fs/cgroup/system.slice/example.service/cgroup.controllersmemory pidsList configuration files and other cgroup files in the cgroup directory for the
example.servicecgroup:# ls /sys/fs/cgroup/system.slice/example.service/cgroup.controllers cgroup.events ... cpu.pressure cpu.stat io.pressure memory.current memory.events ... pids.current pids.events pids.maxThe version 1 hierarchy of cgroups uses a per-controller model. Therefore the output from the
/proc/PID/cgroupfile shows which cgroups under each controller the PID belongs to. You can find the cgroups under the controller directories at/sys/fs/cgroup/<controller_name>/.Refer to the
/usr/share/doc/kernel-doc-<kernel_version>/Documentation/admin-guide/cgroup-v2.rstfile (after installing thekernel-docpackage) for more information.
27.8. Monitoring resource consumption
To view a list of running control groups (cgroups) and their real-time resource consumption, use the monitoring tools.
Procedure
Display a dynamic account of currently running cgroups with the
systemd-cgtopcommand:# systemd-cgtopControl Group Tasks %CPU Memory Input/s Output/s / 607 29.8 1.5G - - /system.slice 125 - 428.7M - - /system.slice/ModemManager.service 3 - 8.6M - - /system.slice/NetworkManager.service 3 - 12.8M - - /system.slice/accounts-daemon.service 3 - 1.8M - - /system.slice/boot.mount - - 48.0K - - /system.slice/chronyd.service 1 - 2.0M - - /system.slice/cockpit.socket - - 1.3M - - /system.slice/colord.service 3 - 3.5M - - /system.slice/crond.service 1 - 1.8M - - /system.slice/cups.service 1 - 3.1M - - /system.slice/dev-hugepages.mount - - 244.0K - - /system.slice/dev-mapper-rhel\x2dswap.swap - - 912.0K - - /system.slice/dev-mqueue.mount - - 48.0K - - /system.slice/example.service 2 - 2.0M - - /system.slice/firewalld.service 2 - 28.8M - - ...The example output displays currently running cgroups ordered by their resource usage (CPU, memory, disk I/O load). The list refreshes every 1 second by default. Therefore, it offers a dynamic insight into the actual resource usage of each control group.
See the
systemd-cgtop(1)man page on your system for more information.
27.9. Using systemd unit files to set limits for applications
Set resource limits for applications by modifying systemd unit files. Configure memory, CPU, or other resource constraints to control how applications use system resources.
Prerequisites
- You have root permissions on the system.
Procedure
Edit the
/usr/lib/systemd/system/example.servicefile to limit the memory usage of a service:… [Service] MemoryMax=1500K …The configuration limits the maximum memory that the processes in a control group cannot exceed. The
example.serviceservice is part of such a control group which has imposed limitations. You can use suffixes K, M, G, or T to identify Kilobyte, Megabyte, Gigabyte, or Terabyte as a unit of measurement.Reload all unit configuration files:
# systemctl daemon-reloadRestart the service:
# systemctl restart example.service
Verification
Check that the changes took effect:
# cat /sys/fs/cgroup/system.slice/example.service/memory.max1536000This output shows that the memory consumption was limited at around 1,500 KB.
27.10. Using systemctl command to set limits to applications
CPU affinity settings restrict the access of a particular process to some CPUs. Effectively, the CPU scheduler never schedules the process to run on the CPU that is not in the affinity mask of the process.
The default CPU affinity mask applies to all services managed by systemd.
To configure CPU affinity mask for a particular systemd service, systemd provides CPUAffinity= both as:
- a unit file option.
-
a configuration option in the [Manager] section of the
/etc/systemd/system.conffile.
The CPUAffinity= unit file option sets a list of CPUs or CPU ranges that are merged and used as the affinity mask. Set the CPU affinity mask for a particular systemd service by using the CPUAffinity unit file option.
Procedure
Check the values of the
CPUAffinityunit file option in the service of your choice:$ systemctl show --property <CPU affinity configuration option> <service name>As the root user, set the required value of the
CPUAffinityunit file option for the CPU ranges used as the affinity mask:# systemctl set-property <service name> CPUAffinity=<value>Restart the service to apply the changes.
# systemctl restart <service name>See
systemd.resource-control(5),systemd.exec(5), andcgroups(7)man pages on your system for more information.
27.11. Setting global default CPU affinity through manager configuration
To set a global default CPU affinity, configure the CPUAffinity option in /etc/systemd/system.conf. This applies to PID 1 and its child processes, but can be overridden per service.
Set the default CPU affinity mask for all systemd services by using the /etc/systemd/system.conf file.
Procedure
-
Set the CPU numbers for the
CPUAffinity=option in the[Manager]section of the/etc/systemd/system.conffile. Save the edited file and reload the systemd service:
# systemctl daemon-reloadReboot the server to apply the changes.
See the
systemd.resource-control(5)man page on your system for more information.
27.12. Configuring NUMA policies by using systemd
To optimize memory access performance for applications on Non-Uniform Memory Access (NUMA) systems, configure NUMA policies for services by using systemd unit files.
Memory close to the CPU has lower latency (local memory) than memory that is local for a different CPU (foreign memory) or is shared between a set of CPUs.
In terms of the Linux kernel, NUMA policy governs where (for example, on which NUMA nodes) the kernel allocates physical memory pages for the process.
systemd provides unit file options NUMAPolicy and NUMAMask to control memory allocation policies for services.
When you configure a strict NUMA policy, for example bind, make sure that you also appropriately set the CPUAffinity= unit file option.
Procedure
Set the NUMA memory policy through the
NUMAPolicyunit file option:Check the values of the
NUMAPolicyunit file option in the service of your choice:$ systemctl show --property <NUMA policy configuration option> <service name>As a root, set the required policy type of the
NUMAPolicyunit file option:# systemctl set-property <service name> NUMAPolicy=<value>Restart the service to apply the changes:
# systemctl restart <service name>
Set a global
NUMAPolicysetting by using the[Manager]configuration option:-
Search in the
/etc/systemd/system.conffile for theNUMAPolicyoption in the[Manager]section of the file. - Edit the policy type and save the file.
Reload the systemd configuration:
# systemd daemon-reload- Reboot the server.
-
Search in the
27.13. NUMA policy configuration options for systemd
Non-Uniform Memory Access (NUMA) policies for processes include NUMAPolicy and NUMAMask. The policy type and node lists determine how memory allocation is controlled.
Systemd unit options for NUMA policy include:
NUMAPolicyControls the NUMA memory policy of the executed processes. You can use these policy types:
- default
- preferred
- bind
- interleave
- local
NUMAMaskControls the NUMA node list that is associated with the selected NUMA policy.
Note that you do not have to specify the
NUMAMaskoption for the following policies:- default
local
For the preferred policy, the list specifies only a single NUMA node.
See systemd.resource-control(5), systemd.exec(5), and set_mempolicy(2) man pages on your system for more information.
27.14. Creating transient cgroups using systemd-run command
To limit resources consumed by a service or scope during its runtime, use transient control groups (cgroups).
Procedure
To create a transient control group, use the
systemd-runcommand in the following format:# systemd-run --unit=<name> --slice=<name>.slice <command>This command creates and starts a transient service or a scope unit and runs a custom command in such a unit.
-
The
--unit=<name>option gives a name to the unit. If--unitis not specified, the name is generated automatically. -
The
--slice=<name>.sliceoption makes your service or scope unit a member of a specified slice. Replace<name>.slicewith the name of an existing slice (as shown in the output ofsystemctl -t slice), or create a new slice by passing a unique name. By default, services and scopes are created as members of thesystem.slice. Replace
<command>with the command you want to enter in the service or the scope unit.The following message is displayed to confirm that you created and started the service or the scope successfully:
# Running as unit <name>.service
-
The
Optional: Keep the unit running after its processes finished to collect runtime information:
# systemd-run --unit=<name> --slice=<name>.slice --remain-after-exit <command>The command creates and starts a transient service unit and runs a custom command in the unit. The
--remain-after-exitoption ensures that the service keeps running after its processes have finished.
27.15. Removing transient control groups
To remove transient control groups (cgroups) when they are no longer needed, use the systemd system and service manager.
Transient cgroups are automatically released when all the processes that a service or a scope unit contains finish.
Procedure
To stop the service unit with all its processes, enter:
# systemctl stop <name>.serviceTo terminate one or more of the unit processes, enter:
# systemctl kill <name>.service --kill-who=PID,… --signal=<signal>The command uses the
--kill-whooption to select process(es) from the control group you want to terminate. To kill multiple processes at the same time, pass a comma-separated list of PIDs. The--signaloption determines the type of POSIX signal to be sent to the specified processes. The default signal is SIGTERM.
Chapter 28. Setting system resource limits for applications by using control groups
Use control groups (cgroups) kernel functionality to control application resource usage. Set limits for system resource allocation, prioritize hardware resources for specific processes, and isolate processes from obtaining hardware resources.
28.1. Introducing control groups
Using the control groups Linux kernel feature, you can organize processes into hierarchically ordered groups called cgroups. You define the hierarchy by providing structure to the cgroups virtual file system, mounted by default on the /sys/fs/cgroup/ directory.
The systemd service manager uses cgroups to organize all units and services that it governs. Manually, you can manage the hierarchies of cgroups by creating and removing sub-directories in the /sys/fs/cgroup/ directory.
The resource controllers in the kernel then modify the behavior of processes in cgroups by limiting, prioritizing or allocating system resources, of those processes. These resources include the following:
- CPU time
- Memory
- Network bandwidth
- Combinations of these resources
The primary use case of cgroups is aggregating system processes and dividing hardware resources among applications and users. This makes it possible to increase the efficiency, stability, and security of your environment.
- Control groups version 1
Control groups version 1 (
cgroups-v1) provides a separate hierarchy for each resource controller. Resources such as CPU, memory, or I/O has its own control group hierarchy. You can combine different control group hierarchies so that one controller can coordinate with another in managing their individual resources. However, when the two controllers belong to different process hierarchies, the coordination is limited.The
cgroups-v1controllers were developed across a large time span, resulting in inconsistent behavior and naming of their control files.- Control groups version 2
Control groups version 2 (
cgroups-v2) provides a single control group hierarchy against which all resource controllers are mounted.The control file behavior and naming is consistent among different controllers.
ImportantRHEL 10, by default, mounts and uses
cgroups-v2.
For more details about cgroups-v1 and cgroups-v2, install the kernel-doc RPM package. After installation, the documentation is in the /usr/share/doc/kernel-doc-<version>/Documentation directory on the local system. The cgroups-v1 documentation files are in the Documentation/admin-guide/cgroup-v1/ directory. This directory has multiple files for different controllers. The cgroups-v2 documentation is in the Documentation/admin-guide/cgroup-v2.rst file.
28.2. Introducing kernel resource controllers
Kernel resource controllers provide the functionality of control groups. RHEL 10 supports various controllers for control groups version 1 (cgroups-v1) and control groups version 2 (cgroups-v2).
A resource controller, also called a control group subsystem, is a kernel subsystem that represents a single resource, such as CPU time, memory, network bandwidth or disk I/O. The Linux kernel provides a range of resource controllers that are mounted automatically by the systemd service manager.
You can find a list of the currently mounted resource controllers in the /proc/cgroups file.
- Controllers available for
cgroups-v1 -
blkio: Sets limits on input/output access to and from block devices. -
cpu: Adjusts the parameters of the default scheduler for a control group’s tasks. Thecpucontroller is mounted together with thecpuacctcontroller on the same mount. -
cpuacct: Creates automatic reports on CPU resources used by tasks in a control group. Thecpuacctcontroller is mounted together with thecpucontroller on the same mount. -
cpuset:Restricts control group tasks to run only on a specified subset of CPUs and to direct the tasks to use memory only on specified memory nodes. -
devices: Controls access to devices for tasks in a control group. -
freezer: Suspends or resumes tasks in a control group. -
memory: Sets limits on memory use by tasks in a control group and generates automatic reports on memory resources used by those tasks. -
net_cls: Tags network packets with a class identifier (classid) that enables the Linux traffic controller (thetccommand) to identify packets that originate from a particular control group task. A subsystem ofnet_cls, thenet_filter(iptables), can also use this tag to perform actions on such packets. -
net_filter: Tags network sockets with a firewall identifier (fwid) that allows the Linux firewall to identify packets that originate from a particular control group task (by using theiptablescommand). -
net_prio: Sets the priority of network traffic. -
pids: Sets limits for multiple processes and their children in a control group. -
perf_event: Groups tasks for monitoring by theperfperformance monitoring and reporting utility. -
rdma: Sets limits on Remote Direct Memory Access/InfiniBand specific resources in a control group. -
hugetlb: Limits the usage of large size virtual memory pages by tasks in a control group.
-
- Controllers available for
cgroups-v2 -
io: Sets limits on input/output access to and from block devices. -
memory: Sets limits on memory use by tasks in a control group and generates automatic reports on memory resources used by those tasks. -
pids: Sets limits for multiple processes and their children in a control group. -
rdma: Sets limits on Remote Direct Memory Access/InfiniBand specific resources in a control group. -
cpu: Adjusts the parameters of the default scheduler for a control group’s tasks and creates automatic reports on CPU resources used by tasks in a control group. -
cpuset: Restricts control group tasks to run only on a specified subset of CPUs and to direct the tasks to use memory only on specified memory nodes. Supports only the core functionality (cpus{,.effective},mems{,.effective}) with a new partition feature. -
perf_event: Groups tasks for monitoring by theperfperformance monitoring and reporting utility.perf_eventis enabled automatically on the v2 hierarchy.
-
A resource controller can be used either in a cgroups-v1 hierarchy or a cgroups-v2 hierarchy, not simultaneously in both.
28.3. Introducing namespaces
Namespaces create separate spaces for organizing and identifying software objects. This keeps them from affecting each other. As a result, each software object contains its own set of resources, for example, a mount point, a network device, or a hostname, even though they are sharing the same system.
One of the most common technologies that use namespaces are containers.
Changes to a particular global resource are visible only to processes in that namespace and do not affect the rest of the system or other namespaces.
To inspect which namespaces a process is a member of, you can check the symbolic links in the /proc/<PID>/ns/ directory.
| Namespace | Isolates |
|---|---|
| Mount | Mount points |
| UTS | Hostname and NIS domain name |
| IPC | SysV IPC, POSIX message queues |
| PID | Process IDs |
| Network | Network devices, stacks, ports, and so on |
| User | User and group IDs |
| Control groups | Control group root directory |
See namespaces(7) and cgroup_namespaces(7) man pages on your system for more information.
Chapter 29. Using cgroupfs to manually manage cgroups
Manage cgroup hierarchies by creating directories on the cgroupfs virtual file system, which is mounted by default on /sys/fs/cgroup/. Specify required configurations in dedicated control files.
cgroups-v1 support is deprecated by systemd and therefore, cgroups-v1 will be removed from future Red Hat Enterprise Linux 10 releases. You must use cgroups-v2 from future releases of RHEL 10.
You must use systemd for controlling the usage of system resources. You must not manually configure the cgroups virtual file system unless it is a special case.
29.1. Creating cgroups and enabling controllers in cgroups-v2 file system
To manage control groups (cgroups), create or remove directories in the cgroups virtual file system, usually at /sys/fs/cgroup/. To use controller settings, enable them for child cgroups. Create at least two levels of child cgroups to organize files and optimize controller usage.
Prerequisites
- You have root permissions on the system.
Procedure
Create the
/sys/fs/cgroup/Example/directory:# mkdir /sys/fs/cgroup/Example/The
/sys/fs/cgroup/Example/directory defines a child group. When you create the/sys/fs/cgroup/Example/directory, somecgroups-v2interface files are automatically created in the directory. The/sys/fs/cgroup/Example/directory contains also controller-specific files for thememoryandpidscontrollers.Optional: Inspect the newly created child control group:
# ll /sys/fs/cgroup/Example/-r--r--r--. 1 root root 0 Jun 1 10:33 cgroup.controllers -r--r--r--. 1 root root 0 Jun 1 10:33 cgroup.events -rw-r--r--. 1 root root 0 Jun 1 10:33 cgroup.freeze -rw-r--r--. 1 root root 0 Jun 1 10:33 cgroup.procs ... -rw-r--r--. 1 root root 0 Jun 1 10:33 cgroup.subtree_control -r--r--r--. 1 root root 0 Jun 1 10:33 memory.events.local -rw-r--r--. 1 root root 0 Jun 1 10:33 memory.high -rw-r--r--. 1 root root 0 Jun 1 10:33 memory.low ... -r--r--r--. 1 root root 0 Jun 1 10:33 pids.current -r--r--r--. 1 root root 0 Jun 1 10:33 pids.events -rw-r--r--. 1 root root 0 Jun 1 10:33 pids.maxThe example output shows general cgroup control interface files such as
cgroup.procsorcgroup.controllers. These files are common to all control groups, regardless of enabled controllers.The files such as
memory.highandpids.maxrelate to thememoryandpidscontrollers, which are in the root control group (/sys/fs/cgroup/), and are enabled by default by systemd.By default, the newly created child group inherits all settings from the parent cgroup. In this case, there are no limits from the root cgroup.
Verify that the required controllers are available in the
/sys/fs/cgroup/cgroup.controllersfile:# cat /sys/fs/cgroup/cgroup.controllerscpuset cpu io memory hugetlb pids rdmaEnable the required controllers. In this example it is
cpuandcpusetcontrollers:# echo "+cpu" >> /sys/fs/cgroup/cgroup.subtree_control # echo "+cpuset" >> /sys/fs/cgroup/cgroup.subtree_controlThese commands enable the
cpuandcpusetcontrollers for the immediate child groups of the/sys/fs/cgroup/root control group. Including the newly createdExamplecontrol group. A child group is where you can specify processes and apply control checks to each of the processes based on your criteria.Users can read the contents of the
cgroup.subtree_controlfile at any level to get an idea of what controllers are available to enable in the immediate child group.NoteBy default, the
/sys/fs/cgroup/cgroup.subtree_controlfile in the root control group containsmemoryandpidscontrollers.Enable the required controllers for child cgroups of the
Examplecontrol group:# echo "+cpu +cpuset" >> /sys/fs/cgroup/Example/cgroup.subtree_controlThis command ensures that the immediate child control group will only have controllers relevant to regulate the CPU time distribution - not to
memoryorpidscontrollers.Create the
/sys/fs/cgroup/Example/tasks/directory:# mkdir /sys/fs/cgroup/Example/tasks/The
/sys/fs/cgroup/Example/tasks/directory defines a child group with files that relate purely tocpuandcpusetcontrollers. You can now assign processes to this control group and usecpuandcpusetcontroller options for your processes.Optional: Inspect the child control group:
# ll /sys/fs/cgroup/Example/tasks-r--r--r--. 1 root root 0 Jun 1 11:45 cgroup.controllers -r--r--r--. 1 root root 0 Jun 1 11:45 cgroup.events -rw-r--r--. 1 root root 0 Jun 1 11:45 cgroup.freeze -rw-r--r--. 1 root root 0 Jun 1 11:45 cgroup.max.depth -rw-r--r--. 1 root root 0 Jun 1 11:45 cgroup.max.descendants -rw-r--r--. 1 root root 0 Jun 1 11:45 cgroup.procs -r--r--r--. 1 root root 0 Jun 1 11:45 cgroup.stat -rw-r--r--. 1 root root 0 Jun 1 11:45 cgroup.subtree_control -rw-r--r--. 1 root root 0 Jun 1 11:45 cgroup.threads -rw-r--r--. 1 root root 0 Jun 1 11:45 cgroup.type -rw-r--r--. 1 root root 0 Jun 1 11:45 cpu.max -rw-r--r--. 1 root root 0 Jun 1 11:45 cpu.pressure -rw-r--r--. 1 root root 0 Jun 1 11:45 cpuset.cpus -r--r--r--. 1 root root 0 Jun 1 11:45 cpuset.cpus.effective -rw-r--r--. 1 root root 0 Jun 1 11:45 cpuset.cpus.partition -rw-r--r--. 1 root root 0 Jun 1 11:45 cpuset.mems -r--r--r--. 1 root root 0 Jun 1 11:45 cpuset.mems.effective -r--r--r--. 1 root root 0 Jun 1 11:45 cpu.stat -rw-r--r--. 1 root root 0 Jun 1 11:45 cpu.weight -rw-r--r--. 1 root root 0 Jun 1 11:45 cpu.weight.nice -rw-r--r--. 1 root root 0 Jun 1 11:45 io.pressure -rw-r--r--. 1 root root 0 Jun 1 11:45 memory.pressureImportantThe
cpucontroller is only activated if the relevant child control group has at least 2 processes which compete for time on a single CPU.
Verification
Optional: confirm that you have created a new cgroup with only the required controllers active:
# cat /sys/fs/cgroup/Example/tasks/cgroup.controllerscpuset cpu
29.2. Controlling distribution of CPU time for applications by adjusting CPU weight
To regulate the distribution of CPU time to applications, assign weights to the relevant files of the cpu controller in the cgroup tree.
Prerequisites
- You have root permissions on the system.
- You have applications for which you want to control distribution of CPU time.
-
You mounted
cgroups-v2filesystem. You created a two level hierarchy of child control groups inside the
/sys/fs/cgroup/root control group as in the following example:... ├── Example │ ├── g1 │ ├── g2 │ └── g3 ...-
You enabled the
cpucontroller in the parent control group and in child control groups similarly as described in Creating cgroups and enabling controllers in cgroups-v2 file system.
Procedure
Configure the required CPU weights to achieve resource restrictions within the control groups:
# echo "150" > /sys/fs/cgroup/Example/g1/cpu.weight # echo "100" > /sys/fs/cgroup/Example/g2/cpu.weight # echo "50" > /sys/fs/cgroup/Example/g3/cpu.weightAdd the applications' PIDs to the
g1,g2, andg3child groups:# echo "33373" > /sys/fs/cgroup/Example/g1/cgroup.procs # echo "33374" > /sys/fs/cgroup/Example/g2/cgroup.procs # echo "33377" > /sys/fs/cgroup/Example/g3/cgroup.procsThese commands ensure that the required applications become members of the
Example/g*/child cgroups and will get their CPU time distributed based on the configuration of those cgroups.The weights of the children cgroups (
g1,g2,g3) that have running processes are summed up at the level of the parent cgroup (Example). The CPU resource is then distributed proportionally based on the assigned weights.As a result, when all processes run at the same time, the kernel allocates to each of them the proportionate CPU time based on the assigned cgroup’s
cpu.weightfile:Expand Child cgroup cpu.weightfileCPU time allocation g1
150
~50% (150/300)
g2
100
~33% (100/300)
g3
50
~16% (50/300)
The value of the
cpu.weightcontroller file is not a percentage.If one process stopped running, leaving cgroup
g2with no running processes, the calculation would omit the cgroupg2and only account weights of cgroupsg1andg3:Expand Child cgroup cpu.weightfileCPU time allocation g1
150
~75% (150/200)
g3
50
~25% (50/200)
ImportantIf a child cgroup has multiple running processes, the CPU time allocated to the cgroup is distributed equally among its member processes.
Verification
Verify that the applications run in the specified control groups:
# cat /proc/33373/cgroup /proc/33374/cgroup /proc/33377/cgroup0::/Example/g1 0::/Example/g2 0::/Example/g3The command output shows the processes of the specified applications that run in the
Example/g*/child cgroups.Inspect the current CPU consumption of the throttled applications:
# toptop - 05:17:18 up 1 day, 18:25, 1 user, load average: 3.03, 3.03, 3.00 Tasks: 95 total, 4 running, 91 sleeping, 0 stopped, 0 zombie %Cpu(s): 18.1 us, 81.6 sy, 0.0 ni, 0.0 id, 0.0 wa, 0.3 hi, 0.0 si, 0.0 st MiB Mem : 3737.0 total, 3233.7 free, 132.8 used, 370.5 buff/cache MiB Swap: 4060.0 total, 4060.0 free, 0.0 used. 3373.1 avail Mem PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND 33373 root 20 0 18720 1748 1460 R *49.5* 0.0 415:05.87 sha1sum 33374 root 20 0 18720 1756 1464 R *32.9* 0.0 412:58.33 sha1sum 33377 root 20 0 18720 1860 1568 R *16.3* 0.0 411:03.12 sha1sum 760 root 20 0 416620 28540 15296 S 0.3 0.7 0:10.23 tuned 1 root 20 0 186328 14108 9484 S 0.0 0.4 0:02.00 systemd 2 root 20 0 0 0 0 S 0.0 0.0 0:00.01 kthread ...NoteAll processes run on a single CPU for clear illustration. The CPU weight applies the same principles when used on multiple CPUs.
Notice that the CPU resource for the
PID 33373,PID 33374, andPID 33377was allocated based on the 150, 100, and 50 weights you assigned to child cgroups. The weights correspond to around 50%, 33%, and 16% allocation of CPU time for each application.
Chapter 30. Analyzing system performance with eBPF
Use the bpftrace and BPF Compiler Collection (BCC) library to create tools for analyzing Linux system performance and gathering information that is difficult to obtain through other interfaces.
30.1. Using the bpftrace package
bpftrace is a powerful tracing tool for Red Hat Enterprise Linux systems that uses extended Berkeley Packet Filter (eBPF) technology. With bpftrace, you can trace and analyze kernel and user-space events dynamically without modifying the kernel code.
Procedure
Install the
bpftracepackage:$ sudo dnf install bpftraceRun the test:
$ sudo bpftrace -e 'tracepoint:raw_syscalls:sys_enter { @ = count(); } interval:s:1 { print(@); clear(@); }'This command displays a high-level overview of system activity by observing the rate of system calls made.
You are now ready to use
bpftrace. You can explore example scripts located at/usr/share/bpftrace/tools/, learn scripts online or create your own scripts to trace events and analyze system behavior.
30.2. Installing the bcc-tools package
Install the bcc-tools package, which also installs the BPF Compiler Collection (BCC) library as a dependency.
Procedure
Install
bcc-tools:# dnf install bcc-toolsThe BCC tools are installed in the
/usr/share/bcc/tools/directory.
Verification
Inspect the installed tools:
# ls -l /usr/share/bcc/tools/... -rwxr-xr-x. 1 root root 4198 Dec 14 17:53 dcsnoop -rwxr-xr-x. 1 root root 3931 Dec 14 17:53 dcstat -rwxr-xr-x. 1 root root 20040 Dec 14 17:53 deadlock_detector -rw-r--r--. 1 root root 7105 Dec 14 17:53 deadlock_detector.c drwxr-xr-x. 3 root root 8192 Mar 11 10:28 doc -rwxr-xr-x. 1 root root 7588 Dec 14 17:53 execsnoop -rwxr-xr-x. 1 root root 6373 Dec 14 17:53 ext4dist -rwxr-xr-x. 1 root root 10401 Dec 14 17:53 ext4slower ...The
docdirectory in the listing above contains documentation for each tool.
30.3. Using selected bcc-tools for performance analyses
Use the pre-created programs from the BPF Compiler Collection (BCC) library to analyze system performance on a per-event basis. You can use the programs in the BCC library as examples to create additional programs.
Prerequisites
- You have root permissions on the system.
- You have installed the bcc-tools package.
Procedure
Use
execsnoopto examine the new system processes.Run the
execsnoopprogram in one command line session:# /usr/share/bcc/tools/execsnoopTo create a short-lived process of the
lscommand, in another command line session, enter:$ ls /usr/share/bcc/tools/doc/The command line session that runs
execsnoopshows the output similar to the following:PCOMM PID PPID RET ARGS ls 8382 8287 0 /usr/bin/ls --color=auto /usr/share/bcc/tools/doc/ ...The
execsnoopprogram prints a line of output for each new process that consumes system resources. It even detects processes of programs that run very shortly, such asls, and most monitoring tools would not register them.The
execsnoopoutput displays the following fields:- PCOMM
-
The process name. (
ls) - PID
-
The process ID. (
8382) - PPID
-
The parent process ID. (
8287) - RET
-
The return value of the
exec()system call (0), which loads program code into new processes. - ARGS
- The location of the started program with arguments.
To see more details, examples, and options for
execsnoop, see/usr/share/bcc/tools/doc/execsnoop_example.txtfile. For more information aboutexec(), seeexec(3)manual pages.
Use
opensnoopto track what files a command opens.In one command line session, run the
opensnoopprogram to print the output for files opened only by the process of theunamecommand:# /usr/share/bcc/tools/opensnoop -n unameIn another command line session, enter the command to open certain files:
$ unameThe command line session that runs
opensnoopshows the output similar to the following:PID COMM FD ERR PATH 8596 uname 3 0 /etc/ld.so.cache 8596 uname 3 0 /lib64/libc.so.6 8596 uname 3 0 /usr/lib/locale/locale-archive ...The
opensnoopprogram watches theopen()system call across the whole system, and prints a line of output for each file thatunametried to open along the way.The
opensnoopoutput displays the following fields:- PID
-
The process ID. (
8596) - COMM
-
The process name. (
uname) - FD
-
The file descriptor - a value that
open()returns to refer to the open file. (3) - ERR
- Any errors.
- PATH
-
The location of files that
open()tried to open.
If a command tries to read a non-existent file, then the
FDcolumn returns-1and theERRcolumn prints a value corresponding to the relevant error. As a result,opensnoopcan help you identify an application that does not behave properly.To see more details, examples, and options for
opensnoop, see/usr/share/bcc/tools/doc/opensnoop_example.txtfile. For more information aboutopen(), seeopen(2)manual pages.
Use the
biotopto monitor the top processes performing I/O operations on the disk.Run the
biotopprogram in one command line session with argument30to produce a 30-second summary:# /usr/share/bcc/tools/biotop 30NoteWhen no argument provided, the output screen by default refreshes every 1 second.
In another command line session, enter the command to read the content from the local hard disk device and write the output to the
/dev/zerofile:# dd if=/dev/vda of=/dev/zeroThis step generates certain I/O traffic to illustrate
biotop.The command line session that runs
biotopshows the output similar to the following:PID COMM D MAJ MIN DISK I/O Kbytes AVGms 9568 dd R 252 0 vda 16294 14440636.0 3.69 48 kswapd0 W 252 0 vda 1763 120696.0 1.65 7571 gnome-shell R 252 0 vda 834 83612.0 0.33 1891 gnome-shell R 252 0 vda 1379 19792.0 0.15 7515 Xorg R 252 0 vda 280 9940.0 0.28 7579 llvmpipe-1 R 252 0 vda 228 6928.0 0.19 9515 gnome-control-c R 252 0 vda 62 6444.0 0.43 8112 gnome-terminal- R 252 0 vda 67 2572.0 1.54 7807 gnome-software R 252 0 vda 31 2336.0 0.73 9578 awk R 252 0 vda 17 2228.0 0.66 7578 llvmpipe-0 R 252 0 vda 156 2204.0 0.07 9581 pgrep R 252 0 vda 58 1748.0 0.42 7531 InputThread R 252 0 vda 30 1200.0 0.48 7504 gdbus R 252 0 vda 3 1164.0 0.30 1983 llvmpipe-1 R 252 0 vda 39 724.0 0.08 1982 llvmpipe-0 R 252 0 vda 36 652.0 0.06 ...The
biotopoutput displays the following fields:- PID
-
The process ID. (
9568) - COMM
-
The process name. (
dd) - DISK
-
The disk performing the read operations. (
vda) - I/O
- The number of read operations performed. (16294)
- Kbytes
- The amount of Kbytes reached by the read operations. (14,440,636)
- AVGms
- The average I/O time of read operations. (3.69)
For more details, examples, and options for
biotop, see the/usr/share/bcc/tools/doc/biotop_example.txtfile. For more information aboutdd, seedd(1)manual pages.
Use
xfsslowerto expose unexpectedly slow file system operations.The
xfsslowermeasures the time spent by XFS file system in performing read, write, open or sync (fsync) operations. The1argument ensures that the program shows only the operations that are slower than 1 ms.Run the
xfsslowerprogram in one command line session:# /usr/share/bcc/tools/xfsslower 1NoteWhen no arguments provided,
xfsslowerby default displays operations slower than 10 ms.In another command line session, enter the command to create a text file in the
vimeditor to start interaction with the XFS file system:$ vim textThe command line session that runs
xfsslowershows something similar upon saving the file from the previous step:TIME COMM PID T BYTES OFF_KB LAT(ms) FILENAME 13:07:14 b'bash' 4754 R 256 0 7.11 b'vim' 13:07:14 b'vim' 4754 R 832 0 4.03 b'libgpm.so.2.1.0' 13:07:14 b'vim' 4754 R 32 20 1.04 b'libgpm.so.2.1.0' 13:07:14 b'vim' 4754 R 1982 0 2.30 b'vimrc' 13:07:14 b'vim' 4754 R 1393 0 2.52 b'getscriptPlugin.vim' 13:07:45 b'vim' 4754 S 0 0 6.71 b'text' 13:07:45 b'pool' 2588 R 16 0 5.58 b'text' ...Each line represents an operation in the file system, which took more time than a certain threshold.
xfsslowerdetects possible file system problems, which can take form of unexpectedly slow operations.The
xfssloweroutput displays the following fields:- COMM
-
The process name. (
b’bash') - T
The operation type. (
R)- Read
- Write
- Sync
- OFF_KB
- The file offset in KB. (0)
- FILENAME
- The file that is read, written, or synced.
To see more details, examples, and options for
xfsslower, see/usr/share/bcc/tools/doc/xfsslower_example.txtfile. For more information aboutfsync, seefsync(2)manual pages.