第6章 Red Hat OpenStack Platform への 2 層 Ceph Storage のデプロイ
OpenStack director を使用すると、特定の層に属する新たな Ceph ノードを Ceph クラスターに追加することで、さまざまな Red Hat Ceph Storage パフォーマンス層をデプロイすることができます。
たとえば、SSD ドライブを持つ新たな Object Storage Daemon (OSD) ノードを既存の Ceph クラスターに追加して、これらのノードのデータを保存する専用の Block Storage (cinder) バックエンドを作成することができます。次に、新たな Block Storage ボリュームを作成するユーザーは、希望するパフォーマンス層 (HDD または新しい SSD) を選択することができます。
このタイプのデプロイメントでは、Red Hat OpenStack Platform director がカスタマイズされた CRUSH マップを ceph-ansible に渡す必要があります。CRUSH マップを使用すると、ディスクパフォーマンスに基づいて OSD ノードを分割することができますが、この機能を物理インフラストラクチャーレイアウトのマッピングに使用することもできます。
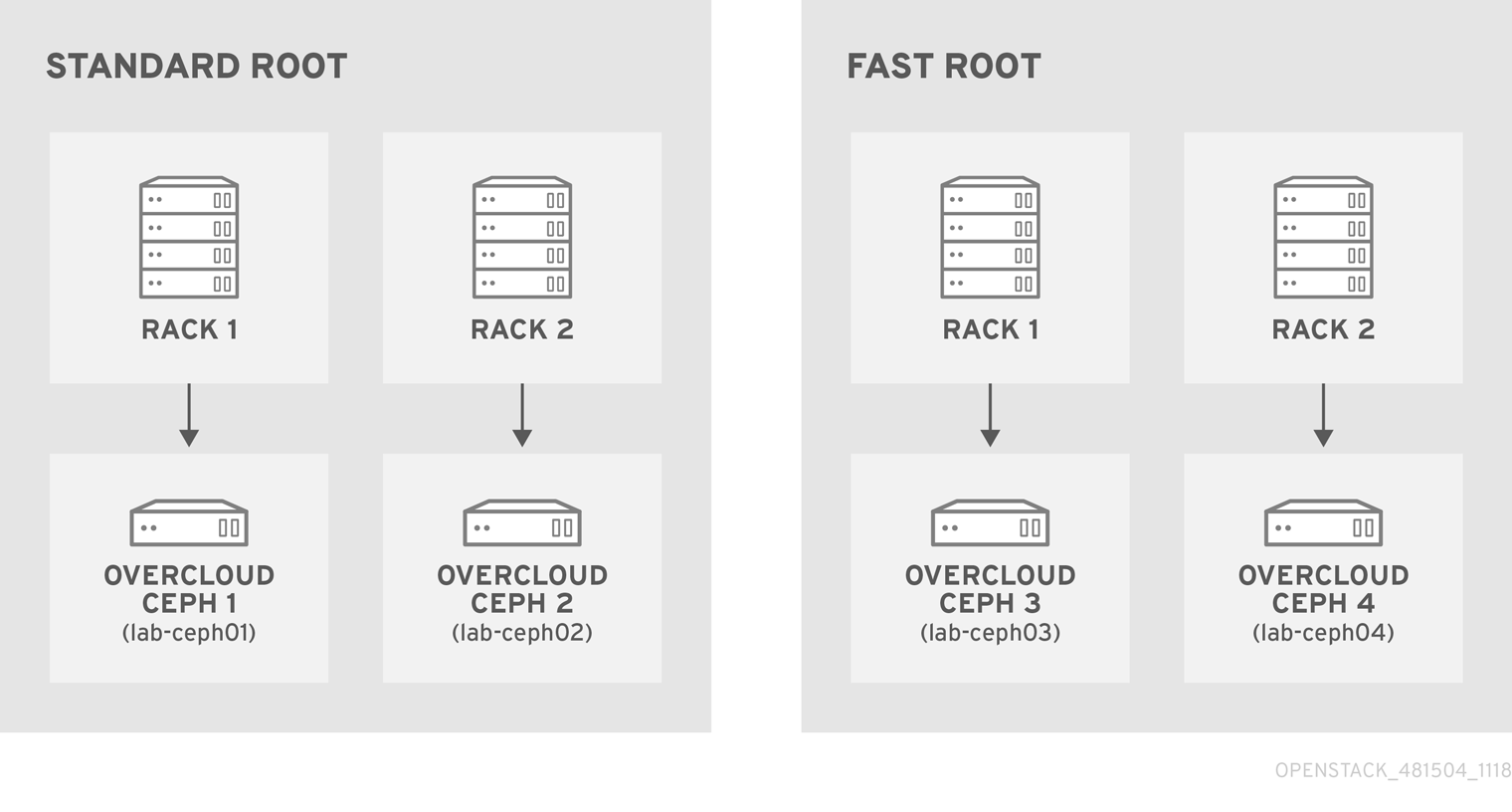
以下のセクションでは、4 つのノードのデプロイ方法を説明します。4 つのうち、2 つは SSD を使用し、他の 2 つは HDD を使用します。反復可能なパターンの通信用に簡単な例を示します。ただし、実稼働デプロイメントでは、より多くのノードおよび OSD を使用して、Red Hat Ceph Storage hardware selection guide に従ってサポートされるようにする必要があります。
6.1. CRUSH マップを作成します。
CRUSH マップを使用すると、OSD ノードを CRUSH ルートに配置できます。デフォルトでは、デフォルトのルートが作成され、これにすべての OSD ノードが含まれます。
指定のルート内では、物理トポロジー、ラック、ルームなどを定義してから、必要な階層 (またはバケット) に OSD ノードを配置します。デフォルトでは、物理トポロジーは定義されません。すべてのノードが同じラックにあるかのようなフラットな設計を前提とします。
カスタム CRUSH マップの作成に関する詳細は、Storage Strategies Guideの Crush Administration を参照してください。