Chapter 6. Using Container Storage Interface (CSI)
6.1. Configuring CSI volumes
The Container Storage Interface (CSI) allows OpenShift Container Platform to consume storage from storage back ends that implement the CSI interface as persistent storage.
OpenShift Container Platform 4.12 supports version 1.6.0 of the CSI specification.
6.1.1. CSI architecture
CSI drivers are typically shipped as container images. These containers are not aware of OpenShift Container Platform where they run. To use CSI-compatible storage back end in OpenShift Container Platform, the cluster administrator must deploy several components that serve as a bridge between OpenShift Container Platform and the storage driver.
The following diagram provides a high-level overview about the components running in pods in the OpenShift Container Platform cluster.
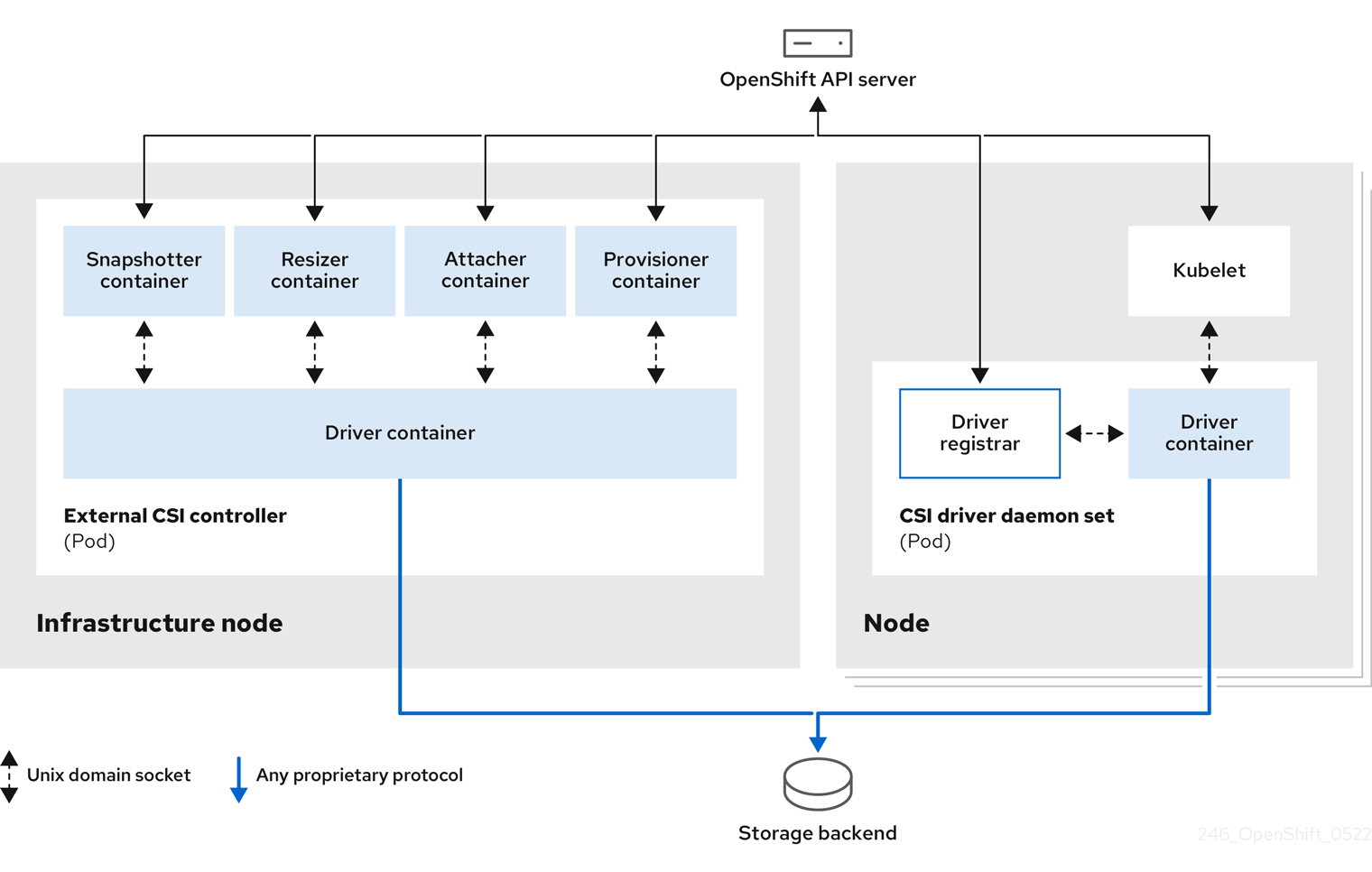
It is possible to run multiple CSI drivers for different storage back ends. Each driver needs its own external controllers deployment and daemon set with the driver and CSI registrar.
6.1.1.1. External CSI controllers
External CSI controllers is a deployment that deploys one or more pods with five containers:
-
The snapshotter container watches
VolumeSnapshotandVolumeSnapshotContentobjects and is responsible for the creation and deletion ofVolumeSnapshotContentobject. -
The resizer container is a sidecar container that watches for
PersistentVolumeClaimupdates and triggersControllerExpandVolumeoperations against a CSI endpoint if you request more storage onPersistentVolumeClaimobject. -
An external CSI attacher container translates
attachanddetachcalls from OpenShift Container Platform to respectiveControllerPublishandControllerUnpublishcalls to the CSI driver. -
An external CSI provisioner container that translates
provisionanddeletecalls from OpenShift Container Platform to respectiveCreateVolumeandDeleteVolumecalls to the CSI driver. - A CSI driver container.
The CSI attacher and CSI provisioner containers communicate with the CSI driver container using UNIX Domain Sockets, ensuring that no CSI communication leaves the pod. The CSI driver is not accessible from outside of the pod.
The attach, detach, provision, and delete operations typically require the CSI driver to use credentials to the storage backend. Run the CSI controller pods on infrastructure nodes so the credentials are never leaked to user processes, even in the event of a catastrophic security breach on a compute node.
The external attacher must also run for CSI drivers that do not support third-party attach or detach operations. The external attacher will not issue any ControllerPublish or ControllerUnpublish operations to the CSI driver. However, it still must run to implement the necessary OpenShift Container Platform attachment API.
6.1.1.2. CSI driver daemon set
The CSI driver daemon set runs a pod on every node that allows OpenShift Container Platform to mount storage provided by the CSI driver to the node and use it in user workloads (pods) as persistent volumes (PVs). The pod with the CSI driver installed contains the following containers:
-
A CSI driver registrar, which registers the CSI driver into the
openshift-nodeservice running on the node. Theopenshift-nodeprocess running on the node then directly connects with the CSI driver using the UNIX Domain Socket available on the node. - A CSI driver.
The CSI driver deployed on the node should have as few credentials to the storage back end as possible. OpenShift Container Platform will only use the node plugin set of CSI calls such as NodePublish/NodeUnpublish and NodeStage/NodeUnstage, if these calls are implemented.
6.1.2. CSI drivers supported by OpenShift Container Platform
OpenShift Container Platform installs certain CSI drivers by default, giving users storage options that are not possible with in-tree volume plugins.
To create CSI-provisioned persistent volumes that mount to these supported storage assets, OpenShift Container Platform installs the necessary CSI driver Operator, the CSI driver, and the required storage class by default. For more details about the default namespace of the Operator and driver, see the documentation for the specific CSI Driver Operator.
The following table describes the CSI drivers that are installed with OpenShift Container Platform and which CSI features they support, such as volume snapshots, cloning, and resize.
The AWS EFS and GCP Filestore CSI drivers are not installed by default, and must be installed manually. For instructions on installing the AWS EFS CSI driver, see Setting up AWS Elastic File Service CSI Driver Operator. For instructions on installing the GCP Filestore CSI driver, see Google Compute Platform Filestore CSI Driver Operator.
The following table describes the CSI drivers that are installed with OpenShift Container Platform, supported by OpenShift Container Platform, and which CSI features they support, such as volume snapshots and resize.
If your CSI driver is not listed in the following table, you must follow the installation instructions provided by your CSI storage vendor to use their supported CSI features.
For a list of third-party-certified CSI drivers, see the Red Hat ecosystem portal under Additional resources.
| CSI driver | CSI volume snapshots | CSI cloning | CSI resize |
|---|---|---|---|
| AliCloud Disk |
✅ |
- |
✅ |
| AWS EBS |
✅ |
- |
✅ |
| AWS EFS |
- |
- |
- |
| Google Compute Platform (GCP) persistent disk (PD) |
✅ |
✅ |
✅ |
| GCP Filestore |
✅ |
- |
✅ |
| IBM VPC Block |
✅[3] |
- |
✅[3] |
| LVM Storage |
✅ |
✅ |
✅ |
| Microsoft Azure Disk |
✅ |
✅ |
✅ |
| Microsoft Azure Stack Hub |
✅ |
✅ |
✅ |
| Microsoft Azure File |
- |
- |
✅ |
| OpenStack Cinder |
✅ |
✅ |
✅ |
| OpenShift Data Foundation |
✅ |
✅ |
✅ |
| OpenStack Manila |
✅ |
- |
- |
| Red Hat Virtualization (oVirt) |
- |
- |
✅ |
| VMware vSphere |
✅[1] |
- |
✅[2] |
1.
- Requires vSphere version 7.0 Update 3 or later for both vCenter Server and ESXi.
- Does not support fileshare volumes.
2.
- Offline volume expansion: minimum required vSphere version is 6.7 Update 3 P06
- Online volume expansion: minimum required vSphere version is 7.0 Update 2.
3.
- Does not support offline snapshots or resize. Volume must be attached to a running pod.
If your CSI driver is not listed in the preceding table, you must follow the installation instructions provided by your CSI storage vendor to use their supported CSI features.
6.1.3. Dynamic provisioning
Dynamic provisioning of persistent storage depends on the capabilities of the CSI driver and underlying storage back end. The provider of the CSI driver should document how to create a storage class in OpenShift Container Platform and the parameters available for configuration.
The created storage class can be configured to enable dynamic provisioning.
Procedure
Create a default storage class that ensures all PVCs that do not require any special storage class are provisioned by the installed CSI driver.
# oc create -f - << EOF apiVersion: storage.k8s.io/v1 kind: StorageClass metadata: name: <storage-class>1 annotations: storageclass.kubernetes.io/is-default-class: "true" provisioner: <provisioner-name>2 parameters: EOF
6.1.4. Example using the CSI driver
The following example installs a default MySQL template without any changes to the template.
Prerequisites
- The CSI driver has been deployed.
- A storage class has been created for dynamic provisioning.
Procedure
Create the MySQL template:
# oc new-app mysql-persistentExample output
--> Deploying template "openshift/mysql-persistent" to project default ...# oc get pvcExample output
NAME STATUS VOLUME CAPACITY ACCESS MODES STORAGECLASS AGE mysql Bound kubernetes-dynamic-pv-3271ffcb4e1811e8 1Gi RWO cinder 3s
6.1.5. Volume populators
Volume populators use the datasource field in a persistent volume claim (PVC) spec to create pre-populated volumes.
Volume population is currently enabled, and supported as a Technology Preview feature. However, OpenShift Container Platform does not ship with any volume populators.
Volume populators is a Technology Preview feature only. Technology Preview features are not supported with Red Hat production service level agreements (SLAs) and might not be functionally complete. Red Hat does not recommend using them in production. These features provide early access to upcoming product features, enabling customers to test functionality and provide feedback during the development process.
For more information about the support scope of Red Hat Technology Preview features, see Technology Preview Features Support Scope.
For more information about volume populators, see Kubernetes volume populators.
6.2. CSI inline ephemeral volumes
Container Storage Interface (CSI) inline ephemeral volumes allow you to define a Pod spec that creates inline ephemeral volumes when a pod is deployed and delete them when a pod is destroyed.
This feature is only available with supported Container Storage Interface (CSI) drivers.
CSI inline ephemeral volumes is a Technology Preview feature only. Technology Preview features are not supported with Red Hat production service level agreements (SLAs) and might not be functionally complete. Red Hat does not recommend using them in production. These features provide early access to upcoming product features, enabling customers to test functionality and provide feedback during the development process.
For more information about the support scope of Red Hat Technology Preview features, see Technology Preview Features Support Scope.
6.2.1. Overview of CSI inline ephemeral volumes
Traditionally, volumes that are backed by Container Storage Interface (CSI) drivers can only be used with a PersistentVolume and PersistentVolumeClaim object combination.
This feature allows you to specify CSI volumes directly in the Pod specification, rather than in a PersistentVolume object. Inline volumes are ephemeral and do not persist across pod restarts.
6.2.1.1. Support limitations
By default, OpenShift Container Platform supports CSI inline ephemeral volumes with these limitations:
- Support is only available for CSI drivers. In-tree and FlexVolumes are not supported.
- The Shared Resource CSI Driver supports inline ephemeral volumes as a Technology Preview feature.
- Community or storage vendors provide other CSI drivers that support these volumes. Follow the installation instructions provided by the CSI driver provider.
CSI drivers might not have implemented the inline volume functionality, including Ephemeral capacity. For details, see the CSI driver documentation.
Shared Resource CSI Driver is a Technology Preview feature only. Technology Preview features are not supported with Red Hat production service level agreements (SLAs) and might not be functionally complete. Red Hat does not recommend using them in production. These features provide early access to upcoming product features, enabling customers to test functionality and provide feedback during the development process.
For more information about the support scope of Red Hat Technology Preview features, see Technology Preview Features Support Scope.
6.2.2. Embedding a CSI inline ephemeral volume in the pod specification
You can embed a CSI inline ephemeral volume in the Pod specification in OpenShift Container Platform. At runtime, nested inline volumes follow the ephemeral lifecycle of their associated pods so that the CSI driver handles all phases of volume operations as pods are created and destroyed.
Procedure
-
Create the
Podobject definition and save it to a file. Embed the CSI inline ephemeral volume in the file.
my-csi-app.yaml
kind: Pod apiVersion: v1 metadata: name: my-csi-app spec: containers: - name: my-frontend image: busybox volumeMounts: - mountPath: "/data" name: my-csi-inline-vol command: [ "sleep", "1000000" ] volumes:1 - name: my-csi-inline-vol csi: driver: inline.storage.kubernetes.io volumeAttributes: foo: bar- 1
- The name of the volume that is used by pods.
Create the object definition file that you saved in the previous step.
$ oc create -f my-csi-app.yaml
6.4. CSI volume snapshots
This document describes how to use volume snapshots with supported Container Storage Interface (CSI) drivers to help protect against data loss in OpenShift Container Platform. Familiarity with persistent volumes is suggested.
6.4.1. Overview of CSI volume snapshots
A snapshot represents the state of the storage volume in a cluster at a particular point in time. Volume snapshots can be used to provision a new volume.
OpenShift Container Platform supports Container Storage Interface (CSI) volume snapshots by default. However, a specific CSI driver is required.
With CSI volume snapshots, a cluster administrator can:
- Deploy a third-party CSI driver that supports snapshots.
- Create a new persistent volume claim (PVC) from an existing volume snapshot.
- Take a snapshot of an existing PVC.
- Restore a snapshot as a different PVC.
- Delete an existing volume snapshot.
With CSI volume snapshots, an app developer can:
- Use volume snapshots as building blocks for developing application- or cluster-level storage backup solutions.
- Rapidly rollback to a previous development version.
- Use storage more efficiently by not having to make a full copy each time.
Be aware of the following when using volume snapshots:
- Support is only available for CSI drivers. In-tree and FlexVolumes are not supported.
- OpenShift Container Platform only ships with select CSI drivers. For CSI drivers that are not provided by an OpenShift Container Platform Driver Operator, it is recommended to use the CSI drivers provided by community or storage vendors. Follow the installation instructions furnished by the CSI driver provider.
-
CSI drivers may or may not have implemented the volume snapshot functionality. CSI drivers that have provided support for volume snapshots will likely use the
csi-external-snapshottersidecar. See documentation provided by the CSI driver for details.
6.4.2. CSI snapshot controller and sidecar
OpenShift Container Platform provides a snapshot controller that is deployed into the control plane. In addition, your CSI driver vendor provides the CSI snapshot sidecar as a helper container that is installed during the CSI driver installation.
The CSI snapshot controller and sidecar provide volume snapshotting through the OpenShift Container Platform API. These external components run in the cluster.
The external controller is deployed by the CSI Snapshot Controller Operator.
6.4.2.1. External controller
The CSI snapshot controller binds VolumeSnapshot and VolumeSnapshotContent objects. The controller manages dynamic provisioning by creating and deleting VolumeSnapshotContent objects.
6.4.2.2. External sidecar
Your CSI driver vendor provides the csi-external-snapshotter sidecar. This is a separate helper container that is deployed with the CSI driver. The sidecar manages snapshots by triggering CreateSnapshot and DeleteSnapshot operations. Follow the installation instructions provided by your vendor.
6.4.3. About the CSI Snapshot Controller Operator
The CSI Snapshot Controller Operator runs in the openshift-cluster-storage-operator namespace. It is installed by the Cluster Version Operator (CVO) in all clusters by default.
The CSI Snapshot Controller Operator installs the CSI snapshot controller, which runs in the openshift-cluster-storage-operator namespace.
6.4.3.1. Volume snapshot CRDs
During OpenShift Container Platform installation, the CSI Snapshot Controller Operator creates the following snapshot custom resource definitions (CRDs) in the snapshot.storage.k8s.io/v1 API group:
VolumeSnapshotContentA snapshot taken of a volume in the cluster that has been provisioned by a cluster administrator.
Similar to the
PersistentVolumeobject, theVolumeSnapshotContentCRD is a cluster resource that points to a real snapshot in the storage back end.For manually pre-provisioned snapshots, a cluster administrator creates a number of
VolumeSnapshotContentCRDs. These carry the details of the real volume snapshot in the storage system.The
VolumeSnapshotContentCRD is not namespaced and is for use by a cluster administrator.VolumeSnapshotSimilar to the
PersistentVolumeClaimobject, theVolumeSnapshotCRD defines a developer request for a snapshot. The CSI Snapshot Controller Operator runs the CSI snapshot controller, which handles the binding of aVolumeSnapshotCRD with an appropriateVolumeSnapshotContentCRD. The binding is a one-to-one mapping.The
VolumeSnapshotCRD is namespaced. A developer uses the CRD as a distinct request for a snapshot.VolumeSnapshotClassAllows a cluster administrator to specify different attributes belonging to a
VolumeSnapshotobject. These attributes may differ among snapshots taken of the same volume on the storage system, in which case they would not be expressed by using the same storage class of a persistent volume claim.The
VolumeSnapshotClassCRD defines the parameters for thecsi-external-snapshottersidecar to use when creating a snapshot. This allows the storage back end to know what kind of snapshot to dynamically create if multiple options are supported.Dynamically provisioned snapshots use the
VolumeSnapshotClassCRD to specify storage-provider-specific parameters to use when creating a snapshot.The
VolumeSnapshotContentClassCRD is not namespaced and is for use by a cluster administrator to enable global configuration options for their storage back end.
6.4.4. Volume snapshot provisioning
There are two ways to provision snapshots: dynamically and manually.
6.4.4.1. Dynamic provisioning
Instead of using a preexisting snapshot, you can request that a snapshot be taken dynamically from a persistent volume claim. Parameters are specified using a VolumeSnapshotClass CRD.
6.4.4.2. Manual provisioning
As a cluster administrator, you can manually pre-provision a number of VolumeSnapshotContent objects. These carry the real volume snapshot details available to cluster users.
6.4.5. Creating a volume snapshot
When you create a VolumeSnapshot object, OpenShift Container Platform creates a volume snapshot.
Prerequisites
- Logged in to a running OpenShift Container Platform cluster.
-
A PVC created using a CSI driver that supports
VolumeSnapshotobjects. - A storage class to provision the storage back end.
No pods are using the persistent volume claim (PVC) that you want to take a snapshot of.
WarningCreating a volume snapshot of a PVC that is in use by a pod can cause unwritten data and cached data to be excluded from the snapshot. To ensure that all data is written to the disk, delete the pod that is using the PVC before creating the snapshot.
Procedure
To dynamically create a volume snapshot:
Create a file with the
VolumeSnapshotClassobject described by the following YAML:volumesnapshotclass.yaml
apiVersion: snapshot.storage.k8s.io/v1 kind: VolumeSnapshotClass metadata: name: csi-hostpath-snap driver: hostpath.csi.k8s.io1 deletionPolicy: Delete- 1
- The name of the CSI driver that is used to create snapshots of this
VolumeSnapshotClassobject. The name must be the same as theProvisionerfield of the storage class that is responsible for the PVC that is being snapshotted.
NoteDepending on the driver that you used to configure persistent storage, additional parameters might be required. You can also use an existing
VolumeSnapshotClassobject.Create the object you saved in the previous step by entering the following command:
$ oc create -f volumesnapshotclass.yamlCreate a
VolumeSnapshotobject:volumesnapshot-dynamic.yaml
apiVersion: snapshot.storage.k8s.io/v1 kind: VolumeSnapshot metadata: name: mysnap spec: volumeSnapshotClassName: csi-hostpath-snap1 source: persistentVolumeClaimName: myclaim2 - 1
- The request for a particular class by the volume snapshot. If the
volumeSnapshotClassNamesetting is absent and there is a default volume snapshot class, a snapshot is created with the default volume snapshot class name. But if the field is absent and no default volume snapshot class exists, then no snapshot is created. - 2
- The name of the
PersistentVolumeClaimobject bound to a persistent volume. This defines what you want to create a snapshot of. Required for dynamically provisioning a snapshot.
Create the object you saved in the previous step by entering the following command:
$ oc create -f volumesnapshot-dynamic.yaml
To manually provision a snapshot:
Provide a value for the
volumeSnapshotContentNameparameter as the source for the snapshot, in addition to defining volume snapshot class as shown above.volumesnapshot-manual.yaml
apiVersion: snapshot.storage.k8s.io/v1 kind: VolumeSnapshot metadata: name: snapshot-demo spec: source: volumeSnapshotContentName: mycontent1 - 1
- The
volumeSnapshotContentNameparameter is required for pre-provisioned snapshots.
Create the object you saved in the previous step by entering the following command:
$ oc create -f volumesnapshot-manual.yaml
Verification
After the snapshot has been created in the cluster, additional details about the snapshot are available.
To display details about the volume snapshot that was created, enter the following command:
$ oc describe volumesnapshot mysnapThe following example displays details about the
mysnapvolume snapshot:volumesnapshot.yaml
apiVersion: snapshot.storage.k8s.io/v1 kind: VolumeSnapshot metadata: name: mysnap spec: source: persistentVolumeClaimName: myclaim volumeSnapshotClassName: csi-hostpath-snap status: boundVolumeSnapshotContentName: snapcontent-1af4989e-a365-4286-96f8-d5dcd65d78d61 creationTime: "2020-01-29T12:24:30Z"2 readyToUse: true3 restoreSize: 500Mi- 1
- The pointer to the actual storage content that was created by the controller.
- 2
- The time when the snapshot was created. The snapshot contains the volume content that was available at this indicated time.
- 3
- If the value is set to
true, the snapshot can be used to restore as a new PVC.
If the value is set tofalse, the snapshot was created. However, the storage back end needs to perform additional tasks to make the snapshot usable so that it can be restored as a new volume. For example, Amazon Elastic Block Store data might be moved to a different, less expensive location, which can take several minutes.
To verify that the volume snapshot was created, enter the following command:
$ oc get volumesnapshotcontentThe pointer to the actual content is displayed. If the
boundVolumeSnapshotContentNamefield is populated, aVolumeSnapshotContentobject exists and the snapshot was created.-
To verify that the snapshot is ready, confirm that the
VolumeSnapshotobject hasreadyToUse: true.
6.4.6. Deleting a volume snapshot
You can configure how OpenShift Container Platform deletes volume snapshots.
Procedure
Specify the deletion policy that you require in the
VolumeSnapshotClassobject, as shown in the following example:volumesnapshotclass.yaml
apiVersion: snapshot.storage.k8s.io/v1 kind: VolumeSnapshotClass metadata: name: csi-hostpath-snap driver: hostpath.csi.k8s.io deletionPolicy: Delete1 - 1
- When deleting the volume snapshot, if the
Deletevalue is set, the underlying snapshot is deleted along with theVolumeSnapshotContentobject. If theRetainvalue is set, both the underlying snapshot andVolumeSnapshotContentobject remain.
If theRetainvalue is set and theVolumeSnapshotobject is deleted without deleting the correspondingVolumeSnapshotContentobject, the content remains. The snapshot itself is also retained in the storage back end.
Delete the volume snapshot by entering the following command:
$ oc delete volumesnapshot <volumesnapshot_name>Example output
volumesnapshot.snapshot.storage.k8s.io "mysnapshot" deletedIf the deletion policy is set to
Retain, delete the volume snapshot content by entering the following command:$ oc delete volumesnapshotcontent <volumesnapshotcontent_name>Optional: If the
VolumeSnapshotobject is not successfully deleted, enter the following command to remove any finalizers for the leftover resource so that the delete operation can continue:ImportantOnly remove the finalizers if you are confident that there are no existing references from either persistent volume claims or volume snapshot contents to the
VolumeSnapshotobject. Even with the--forceoption, the delete operation does not delete snapshot objects until all finalizers are removed.$ oc patch -n $PROJECT volumesnapshot/$NAME --type=merge -p '{"metadata": {"finalizers":null}}'Example output
volumesnapshotclass.snapshot.storage.k8s.io "csi-ocs-rbd-snapclass" deletedThe finalizers are removed and the volume snapshot is deleted.
6.4.7. Restoring a volume snapshot
The VolumeSnapshot CRD content can be used to restore the existing volume to a previous state.
After your VolumeSnapshot CRD is bound and the readyToUse value is set to true, you can use that resource to provision a new volume that is pre-populated with data from the snapshot. .Prerequisites * Logged in to a running OpenShift Container Platform cluster. * A persistent volume claim (PVC) created using a Container Storage Interface (CSI) driver that supports volume snapshots. * A storage class to provision the storage back end. * A volume snapshot has been created and is ready to use.
Procedure
Specify a
VolumeSnapshotdata source on a PVC as shown in the following:pvc-restore.yaml
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: myclaim-restore spec: storageClassName: csi-hostpath-sc dataSource: name: mysnap1 kind: VolumeSnapshot2 apiGroup: snapshot.storage.k8s.io3 accessModes: - ReadWriteOnce resources: requests: storage: 1GiCreate a PVC by entering the following command:
$ oc create -f pvc-restore.yamlVerify that the restored PVC has been created by entering the following command:
$ oc get pvcA new PVC such as
myclaim-restoreis displayed.
6.5. CSI volume cloning
Volume cloning duplicates an existing persistent volume to help protect against data loss in OpenShift Container Platform. This feature is only available with supported Container Storage Interface (CSI) drivers. You should be familiar with persistent volumes before you provision a CSI volume clone.
6.5.1. Overview of CSI volume cloning
A Container Storage Interface (CSI) volume clone is a duplicate of an existing persistent volume at a particular point in time.
Volume cloning is similar to volume snapshots, although it is more efficient. For example, a cluster administrator can duplicate a cluster volume by creating another instance of the existing cluster volume.
Cloning creates an exact duplicate of the specified volume on the back-end device, rather than creating a new empty volume. After dynamic provisioning, you can use a volume clone just as you would use any standard volume.
No new API objects are required for cloning. The existing dataSource field in the PersistentVolumeClaim object is expanded so that it can accept the name of an existing PersistentVolumeClaim in the same namespace.
6.5.1.1. Support limitations
By default, OpenShift Container Platform supports CSI volume cloning with these limitations:
- The destination persistent volume claim (PVC) must exist in the same namespace as the source PVC.
Cloning is supported with a different Storage Class.
- Destination volume can be the same for a different storage class as the source.
-
You can use the default storage class and omit
storageClassNamein thespec.
- Support is only available for CSI drivers. In-tree and FlexVolumes are not supported.
- CSI drivers might not have implemented the volume cloning functionality. For details, see the CSI driver documentation.
6.5.2. Provisioning a CSI volume clone
When you create a cloned persistent volume claim (PVC) API object, you trigger the provisioning of a CSI volume clone. The clone pre-populates with the contents of another PVC, adhering to the same rules as any other persistent volume. The one exception is that you must add a dataSource that references an existing PVC in the same namespace.
Prerequisites
- You are logged in to a running OpenShift Container Platform cluster.
- Your PVC is created using a CSI driver that supports volume cloning.
- Your storage back end is configured for dynamic provisioning. Cloning support is not available for static provisioners.
Procedure
To clone a PVC from an existing PVC:
Create and save a file with the
PersistentVolumeClaimobject described by the following YAML:pvc-clone.yaml
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: pvc-1-clone namespace: mynamespace spec: storageClassName: csi-cloning1 accessModes: - ReadWriteOnce resources: requests: storage: 5Gi dataSource: kind: PersistentVolumeClaim name: pvc-1- 1
- The name of the storage class that provisions the storage back end. The default storage class can be used and
storageClassNamecan be omitted in the spec.
Create the object you saved in the previous step by running the following command:
$ oc create -f pvc-clone.yamlA new PVC
pvc-1-cloneis created.Verify that the volume clone was created and is ready by running the following command:
$ oc get pvc pvc-1-cloneThe
pvc-1-cloneshows that it isBound.You are now ready to use the newly cloned PVC to configure a pod.
Create and save a file with the
Podobject described by the YAML. For example:kind: Pod apiVersion: v1 metadata: name: mypod spec: containers: - name: myfrontend image: dockerfile/nginx volumeMounts: - mountPath: "/var/www/html" name: mypd volumes: - name: mypd persistentVolumeClaim: claimName: pvc-1-clone1 - 1
- The cloned PVC created during the CSI volume cloning operation.
The created
Podobject is now ready to consume, clone, snapshot, or delete your cloned PVC independently of its originaldataSourcePVC.
6.6. CSI automatic migration
In-tree storage drivers that are traditionally shipped with OpenShift Container Platform are being deprecated and replaced by their equivalent Container Storage Interface (CSI) drivers. OpenShift Container Platform provides automatic migration for certain supported in-tree volume plugins to their equivalent CSI drivers.
6.6.1. Overview
Volumes that are provisioned by using in-tree storage plugins, and that are supported by this feature, are migrated to their counterpart Container Storage Interface (CSI) drivers. This process does not perform any data migration; OpenShift Container Platform only translates the persistent volume object in memory. As a result, the translated persistent volume object is not stored on disk, nor is its contents changed.
The following in-tree to CSI drivers are supported:
| In-tree/CSI drivers | Support level | CSI auto migration enabled automatically? |
|---|---|---|
|
Generally available (GA) |
Yes. For more information, see Automatic migration of in-tree volumes to CSI. |
|
Technology Preview (TP) | No. To enable, see Manually enabling CSI automatic migration. Also, for vSphere, see information below in:
|
CSI automatic migration should be seamless. This feature does not change how you use all existing API objects: for example, PersistentVolumes, PersistentVolumeClaims, and StorageClasses.
Enabling CSI automatic migration for in-tree persistent volumes (PVs) or persistent volume claims (PVCs) does not enable any new CSI driver features, such as snapshots or expansion, if the original in-tree storage plugin did not support it.
6.6.2. Automatic migration of in-tree volumes to CSI
OpenShift Container Platform supports automatic and seamless migration for the following in-tree volume types to their Container Storage Interface (CSI) driver counterpart:
- Azure Disk
- OpenStack Cinder
- Amazon Web Services (AWS) Elastic Block Storage (EBS)
- Google Compute Engine Persistent Disk (GCP PD)
CSI migration for these volume types is considered generally available (GA), and requires no manual intervention.
For new OpenShift Container Platform 4.11, and later, installations, the default storage class is the CSI storage class. All volumes provisioned using this storage class are CSI persistent volumes (PVs).
For clusters upgraded from 4.10, and earlier, to 4.11, and later, the CSI storage class is created, and is set as the default if no default storage class was set prior to the upgrade. In the very unlikely case that there is a storage class with the same name, the existing storage class remains unchanged. Any existing in-tree storage classes remain, and might be necessary for certain features, such as volume expansion to work for existing in-tree PVs. While storage class referencing to the in-tree storage plugin will continue working, we recommend that you switch the default storage class to the CSI storage class.
6.6.3. Manually enabling CSI automatic migration
If you want to test Container Storage Interface (CSI) migration in development or staging OpenShift Container Platform clusters, you must manually enable in-tree to CSI migration for the following in-tree volume types:
- VMware vSphere Disk
- Azure File
CSI automatic migration for the preceding in-tree volume plugins and CSI driver pairs is a Technology Preview feature only. Technology Preview features are not supported with Red Hat production service level agreements (SLAs) and might not be functionally complete. Red Hat does not recommend using them in production. These features provide early access to upcoming product features, enabling customers to test functionality and provide feedback during the development process.
For more information about the support scope of Red Hat Technology Preview features, see Technology Preview Features Support Scope.
After migration, the default storage class remains the in-tree storage class.
CSI automatic migration will be enabled by default for all storage in-tree plugins in a future OpenShift Container Platform release, so it is highly recommended that you test it now and report any issues.
Enabling CSI automatic migration drains, and then restarts, all nodes in the cluster in sequence. This might take some time.
Procedure
Enable feature gates (see Nodes
Working with clusters Enabling features using feature gates). ImportantAfter turning on Technology Preview features using feature gates, they cannot be turned off. As a result, cluster upgrades are prevented.
The following configuration example enables CSI automatic migration for all CSI drivers supported by this feature that are currently in Technology Preview (TP) status:
apiVersion: config.openshift.io/v1 kind: FeatureGate metadata: name: cluster spec: featureSet: TechPreviewNoUpgrade1 ...- 1
- Enables automatic migration for Azure File and VMware vSphere.
You can specify CSI automatic migration for a selected CSI driver by setting
CustomNoUpgradefeatureSetand forfeaturegatesto one of the following:- CSIMigrationAzureFile
- CSIMigrationvSphere
The following configuration example enables automatic migration to the vSphere CSI driver only:
apiVersion: config.openshift.io/v1 kind: FeatureGate metadata: name: cluster spec: featureSet: CustomNoUpgrade customNoUpgrade: enabled: - CSIMigrationvSphere1 ...- 1
- Enables automatic migration for vSphere only.
6.6.4. Updating from OpenShift Container Platform 4.12 to 4.13 with vSphere in-tree PVs
If you are using vSphere in-tree persistent volumes (PVs) and want to update from OpenShift Container Platform 4.12 to 4.13, update vSphere vCenter and ESXI host to 7.0 Update 3L or 8.0 Update 2, otherwise the OpenShift Container Platform upgrade is blocked. After updating vSphere, your OpenShift Container Platform update can occur and automatic Container Storage Interface (CSI) migration for vSphere occurs only if you opt in.
Alternatively, if you do not want to update vSphere, you can proceed with an OpenShift Container Platform update by running the following command to perform an administrator acknowledgment:
oc -n openshift-config patch cm admin-acks --patch '{"data":{"ack-4.12-kube-126-vsphere-migration-in-4.14":"true"}}' --type=mergeIt is generally safe to provide the requested administrator acknowledgment for updates from OpenShift Container Platform 4.12 to 4.13 because CSI migration is not yet enabled for upgraded clusters from 4.12 to 4.13. However, Red Hat recommends that you start planning an update of your vSphere environment for a future update to 4.14, so that all the in-tree volumes can be managed by the CSI driver seamlessly.
If you do not update to OpenShift Container Platform 4.13.10, or later, and do not update vSphere, and then opt in to migration (see Manually enabling CSI automatic migration under Additional resources), known issues can occur. Before opting in to migration, carefully read this knowledge base article.
6.6.5. Updating from OpenShift Container Platform 4.12 to 4.14 with vSphere in-tree PVs
If you are using vSphere in-tree persistent volumes (PVs) and want to update from OpenShift Container Platform 4.12 to 4.14, update vSphere vCenter and ESXI host to 7.0 Update 3L or 8.0 Update 2, otherwise the OpenShift Container Platform updates are blocked. After updating vSphere, your OpenShift Container Platform update can occur and automatic Container Storage Interface (CSI) migration for vSphere occurs automatically by default.
Alternatively, if you do not want to update vSphere, you can proceed with an OpenShift Container Platform update by running both of the following commands to perform an administrator acknowledgment:
oc -n openshift-config patch cm admin-acks --patch '{"data":{"ack-4.12-kube-126-vsphere-migration-in-4.14":"true"}}' --type=mergeoc -n openshift-config patch cm admin-acks --patch '{"data":{"ack-4.13-kube-127-vsphere-migration-in-4.14":"true"}}' --type=mergeIf you update to OpenShift Container Platform 4.14 without updating vSphere, known issues can occur due to CSI migration being enabled by default in OpenShift Container Platform 4.14. Before updating, carefully read this knowledge base article.
Updating from OpenShift Container Platform 4.12 to 4.14 is an Extended Update Support (EUS)-to-EUS update. To understand the ramifications for this type of update and how to perform it, see the EUS-to-EUS update link in the Additional resources section below.
6.7. AliCloud Disk CSI Driver Operator
6.7.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for Alibaba AliCloud Disk Storage.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a CSI Operator and driver.
To create CSI-provisioned PVs that mount to AliCloud Disk storage assets, OpenShift Container Platform installs the AliCloud Disk CSI Driver Operator and the AliCloud Disk CSI driver, by default, in the openshift-cluster-csi-drivers namespace.
-
The AliCloud Disk CSI Driver Operator provides a storage class (
alicloud-disk) that you can use to create persistent volume claims (PVCs). The AliCloud Disk CSI Driver Operator supports dynamic volume provisioning by allowing storage volumes to be created on demand, eliminating the need for cluster administrators to pre-provision storage. - The AliCloud Disk CSI driver enables you to create and mount AliCloud Disk PVs.
6.7.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
Additional resources
6.8. AWS Elastic Block Store CSI Driver Operator
6.8.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for AWS Elastic Block Store (EBS).
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a Container Storage Interface (CSI) Operator and driver.
To create CSI-provisioned PVs that mount to AWS EBS storage assets, OpenShift Container Platform installs the AWS EBS CSI Driver Operator and the AWS EBS CSI driver by default in the openshift-cluster-csi-drivers namespace.
- The AWS EBS CSI Driver Operator provides a StorageClass by default that you can use to create PVCs. You also have the option to create the AWS EBS StorageClass as described in Persistent storage using AWS Elastic Block Store.
- The AWS EBS CSI driver enables you to create and mount AWS EBS PVs.
If you installed the AWS EBS CSI Operator and driver on an OpenShift Container Platform 4.5 cluster, you must uninstall the 4.5 Operator and driver before you update to OpenShift Container Platform 4.12.
6.8.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
OpenShift Container Platform defaults to using an in-tree (non-CSI) plugin to provision AWS EBS storage.
In future OpenShift Container Platform versions, volumes provisioned using existing in-tree plug-ins are planned for migration to their equivalent CSI driver. CSI automatic migration should be seamless. Migration does not change how you use all existing API objects, such as persistent volumes, persistent volume claims, and storage classes. For more information about migration, see CSI automatic migration.
After full migration, in-tree plugins will eventually be removed in future versions of OpenShift Container Platform.
For information about dynamically provisioning AWS EBS persistent volumes in OpenShift Container Platform, see Persistent storage using AWS Elastic Block Store.
6.9. AWS Elastic File Service CSI Driver Operator
6.9.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for AWS Elastic File Service (EFS).
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a CSI Operator and driver.
After installing the AWS EFS CSI Driver Operator, OpenShift Container Platform installs the AWS EFS CSI Operator and the AWS EFS CSI driver by default in the openshift-cluster-csi-drivers namespace. This allows the AWS EFS CSI Driver Operator to create CSI-provisioned PVs that mount to AWS EFS assets.
-
The AWS EFS CSI Driver Operator, after being installed, does not create a storage class by default to use to create persistent volume claims (PVCs). However, you can manually create the AWS EFS
StorageClass. The AWS EFS CSI Driver Operator supports dynamic volume provisioning by allowing storage volumes to be created on-demand. This eliminates the need for cluster administrators to pre-provision storage. - The AWS EFS CSI driver enables you to create and mount AWS EFS PVs.
AWS EFS only supports regional volumes, not zonal volumes.
6.9.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
6.9.3. Setting up the AWS EFS CSI Driver Operator
- Install the AWS EFS CSI Driver Operator.
- Install the AWS EFS CSI Driver.
6.9.3.1. Installing the AWS EFS CSI Driver Operator
The AWS EFS CSI Driver Operator is not installed in OpenShift Container Platform by default. Use the following procedure to install and configure the AWS EFS CSI Driver Operator in your cluster.
Prerequisites
- Access to the OpenShift Container Platform web console.
Procedure
To install the AWS EFS CSI Driver Operator from the web console:
- Log in to the web console.
Install the AWS EFS CSI Operator:
-
Click Operators
OperatorHub. - Locate the AWS EFS CSI Operator by typing AWS EFS CSI in the filter box.
Click the AWS EFS CSI Driver Operator button.
ImportantBe sure to select the AWS EFS CSI Driver Operator and not the AWS EFS Operator. The AWS EFS Operator is a community Operator and is not supported by Red Hat.
- On the AWS EFS CSI Driver Operator page, click Install.
On the Install Operator page, ensure that:
- All namespaces on the cluster (default) is selected.
- Installed Namespace is set to openshift-cluster-csi-drivers.
Click Install.
After the installation finishes, the AWS EFS CSI Operator is listed in the Installed Operators section of the web console.
-
Click Operators
Next steps
- If you are using AWS EFS with AWS Secure Token Service (STS), you must configure the AWS EFS CSI Driver with STS. For more information, see Configuring AWS EFS CSI Driver with STS.
6.9.3.2. Configuring AWS EFS CSI Driver Operator with Security Token Service
This procedure explains how to configure the AWS EFS CSI Driver Operator with OpenShift Container Platform on AWS Security Token Service (STS).
Perform this procedure before you have installed the AWS EFS CSI Operator, but not yet installed the AWS EFS CSI driver as part of the Installing the AWS EFS CSI Driver Operator procedure.
If you perform this procedure after installing the driver and creating volumes, your volumes will fail to mount into pods.
Prerequisites
- You have access to the cluster as a user with the cluster-admin role.
- AWS account credentials
- You have installed the AWS EFS CSI Operator.
Procedure
To configure the AWS EFS CSI Driver Operator with STS:
-
Extract the CCO utility (
ccoctl) binary from the OpenShift Container Platform release image, which you used to install the cluster with STS. For more information, see "Configuring the Cloud Credential Operator utility". Create and save an EFS
CredentialsRequestYAML file, such as shown in the following example, and then place it in thecredrequestsdirectory:Example
apiVersion: cloudcredential.openshift.io/v1 kind: CredentialsRequest metadata: name: openshift-aws-efs-csi-driver namespace: openshift-cloud-credential-operator spec: providerSpec: apiVersion: cloudcredential.openshift.io/v1 kind: AWSProviderSpec statementEntries: - action: - elasticfilesystem:* effect: Allow resource: '*' secretRef: name: aws-efs-cloud-credentials namespace: openshift-cluster-csi-drivers serviceAccountNames: - aws-efs-csi-driver-operator - aws-efs-csi-driver-controller-saRun the
ccoctltool to generate a new IAM role in AWS, and create a YAML file for it in the local file system (<path_to_ccoctl_output_dir>/manifests/openshift-cluster-csi-drivers-aws-efs-cloud-credentials-credentials.yaml).$ ccoctl aws create-iam-roles --name=<name> --region=<aws_region> --credentials-requests-dir=<path_to_directory_with_list_of_credentials_requests>/credrequests --identity-provider-arn=arn:aws:iam::<aws_account_id>:oidc-provider/<name>-oidc.s3.<aws_region>.amazonaws.com-
name=<name>is the name used to tag any cloud resources that are created for tracking. -
region=<aws_region>is the AWS region where cloud resources are created. -
dir=<path_to_directory_with_list_of_credentials_requests>/credrequestsis the directory containing the EFS CredentialsRequest file in previous step. <aws_account_id>is the AWS account ID.Example
$ ccoctl aws create-iam-roles --name my-aws-efs --credentials-requests-dir credrequests --identity-provider-arn arn:aws:iam::123456789012:oidc-provider/my-aws-efs-oidc.s3.us-east-2.amazonaws.comExample output
2022/03/21 06:24:44 Role arn:aws:iam::123456789012:role/my-aws-efs -openshift-cluster-csi-drivers-aws-efs-cloud- created 2022/03/21 06:24:44 Saved credentials configuration to: /manifests/openshift-cluster-csi-drivers-aws-efs-cloud-credentials-credentials.yaml 2022/03/21 06:24:45 Updated Role policy for Role my-aws-efs-openshift-cluster-csi-drivers-aws-efs-cloud-
-
Create the AWS EFS cloud credentials and secret:
$ oc create -f <path_to_ccoctl_output_dir>/manifests/openshift-cluster-csi-drivers-aws-efs-cloud-credentials-credentials.yamlExample
$ oc create -f /manifests/openshift-cluster-csi-drivers-aws-efs-cloud-credentials-credentials.yamlExample output
secret/aws-efs-cloud-credentials created
6.9.3.3. Installing the AWS EFS CSI Driver
Prerequisites
- Access to the OpenShift Container Platform web console.
Procedure
-
Click Administration
CustomResourceDefinitions ClusterCSIDriver. - On the Instances tab, click Create ClusterCSIDriver.
Use the following YAML file:
apiVersion: operator.openshift.io/v1 kind: ClusterCSIDriver metadata: name: efs.csi.aws.com spec: managementState: Managed- Click Create.
Wait for the following Conditions to change to a "True" status:
- AWSEFSDriverNodeServiceControllerAvailable
- AWSEFSDriverControllerServiceControllerAvailable
6.9.4. Creating the AWS EFS storage class
Storage classes are used to differentiate and delineate storage levels and usages. By defining a storage class, users can obtain dynamically provisioned persistent volumes.
The AWS EFS CSI Driver Operator, after being installed, does not create a storage class by default. However, you can manually create the AWS EFS storage class.
6.9.4.1. Creating the AWS EFS storage class using the console
Procedure
-
In the OpenShift Container Platform console, click Storage
StorageClasses. - On the StorageClasses page, click Create StorageClass.
On the StorageClass page, perform the following steps:
- Enter a name to reference the storage class.
- Optional: Enter the description.
- Select the reclaim policy.
-
Select
efs.csi.aws.comfrom the Provisioner drop-down list. - Optional: Set the configuration parameters for the selected provisioner.
- Click Create.
6.9.4.2. Creating the AWS EFS storage class using the CLI
Procedure
Create a
StorageClassobject:kind: StorageClass apiVersion: storage.k8s.io/v1 metadata: name: efs-sc provisioner: efs.csi.aws.com parameters: provisioningMode: efs-ap1 fileSystemId: fs-a53249112 directoryPerms: "700"3 gidRangeStart: "1000"4 gidRangeEnd: "2000"5 basePath: "/dynamic_provisioning"6 - 1
provisioningModemust beefs-apto enable dynamic provisioning.- 2
fileSystemIdmust be the ID of the EFS volume created manually.- 3
directoryPermsis the default permission of the root directory of the volume. In this example, the volume is accessible only by the owner.- 4 5
gidRangeStartandgidRangeEndset the range of POSIX Group IDs (GIDs) that are used to set the GID of the AWS access point. If not specified, the default range is 50000-7000000. Each provisioned volume, and thus AWS access point, is assigned a unique GID from this range.- 6
basePathis the directory on the EFS volume that is used to create dynamically provisioned volumes. In this case, a PV is provisioned as “/dynamic_provisioning/<random uuid>” on the EFS volume. Only the subdirectory is mounted to pods that use the PV.
NoteA cluster admin can create several
StorageClassobjects, each using a different EFS volume.
6.9.5. Creating and configuring access to EFS volumes in AWS
This procedure explains how to create and configure EFS volumes in AWS so that you can use them in OpenShift Container Platform.
Prerequisites
- AWS account credentials
Procedure
To create and configure access to an EFS volume in AWS:
- On the AWS console, open https://console.aws.amazon.com/efs.
Click Create file system:
- Enter a name for the file system.
- For Virtual Private Cloud (VPC), select your OpenShift Container Platform’s' virtual private cloud (VPC).
- Accept default settings for all other selections.
Wait for the volume and mount targets to finish being fully created:
- Go to https://console.aws.amazon.com/efs#/file-systems.
- Click your volume, and on the Network tab wait for all mount targets to become available (~1-2 minutes).
- On the Network tab, copy the Security Group ID (you will need this in the next step).
- Go to https://console.aws.amazon.com/ec2/v2/home#SecurityGroups, and find the Security Group used by the EFS volume.
On the Inbound rules tab, click Edit inbound rules, and then add a new rule with the following settings to allow OpenShift Container Platform nodes to access EFS volumes :
- Type: NFS
- Protocol: TCP
- Port range: 2049
Source: Custom/IP address range of your nodes (for example: “10.0.0.0/16”)
This step allows OpenShift Container Platform to use NFS ports from the cluster.
- Save the rule.
6.9.6. Dynamic provisioning for AWS EFS
The AWS EFS CSI Driver supports a different form of dynamic provisioning than other CSI drivers. It provisions new PVs as subdirectories of a pre-existing EFS volume. The PVs are independent of each other. However, they all share the same EFS volume. When the volume is deleted, all PVs provisioned out of it are deleted too. The EFS CSI driver creates an AWS Access Point for each such subdirectory. Due to AWS AccessPoint limits, you can only dynamically provision 1000 PVs from a single StorageClass/EFS volume.
Note that PVC.spec.resources is not enforced by EFS.
In the example below, you request 5 GiB of space. However, the created PV is limitless and can store any amount of data (like petabytes). A broken application, or even a rogue application, can cause significant expenses when it stores too much data on the volume.
Using monitoring of EFS volume sizes in AWS is strongly recommended.
Prerequisites
- You have created AWS EFS volumes.
- You have created the AWS EFS storage class.
Procedure
To enable dynamic provisioning:
Create a PVC (or StatefulSet or Template) as usual, referring to the
StorageClasscreated previously.apiVersion: v1 kind: PersistentVolumeClaim metadata: name: test spec: storageClassName: efs-sc accessModes: - ReadWriteMany resources: requests: storage: 5Gi
If you have problems setting up dynamic provisioning, see AWS EFS troubleshooting.
6.9.7. Creating static PVs with AWS EFS
It is possible to use an AWS EFS volume as a single PV without any dynamic provisioning. The whole volume is mounted to pods.
Prerequisites
- You have created AWS EFS volumes.
Procedure
Create the PV using the following YAML file:
apiVersion: v1 kind: PersistentVolume metadata: name: efs-pv spec: capacity:1 storage: 5Gi volumeMode: Filesystem accessModes: - ReadWriteMany - ReadWriteOnce persistentVolumeReclaimPolicy: Retain csi: driver: efs.csi.aws.com volumeHandle: fs-ae66151a2 volumeAttributes: encryptInTransit: "false"3 - 1
spec.capacitydoes not have any meaning and is ignored by the CSI driver. It is used only when binding to a PVC. Applications can store any amount of data to the volume.- 2
volumeHandlemust be the same ID as the EFS volume you created in AWS. If you are providing your own access point,volumeHandleshould be<EFS volume ID>::<access point ID>. For example:fs-6e633ada::fsap-081a1d293f0004630.- 3
- If desired, you can disable encryption in transit. Encryption is enabled by default.
If you have problems setting up static PVs, see AWS EFS troubleshooting.
6.9.8. AWS EFS security
The following information is important for AWS EFS security.
When using access points, for example, by using dynamic provisioning as described earlier, Amazon automatically replaces GIDs on files with the GID of the access point. In addition, EFS considers the user ID, group ID, and secondary group IDs of the access point when evaluating file system permissions. EFS ignores the NFS client’s IDs. For more information about access points, see https://docs.aws.amazon.com/efs/latest/ug/efs-access-points.html.
As a consequence, EFS volumes silently ignore FSGroup; OpenShift Container Platform is not able to replace the GIDs of files on the volume with FSGroup. Any pod that can access a mounted EFS access point can access any file on it.
Unrelated to this, encryption in transit is enabled by default. For more information, see https://docs.aws.amazon.com/efs/latest/ug/encryption-in-transit.html.
6.9.9. AWS EFS troubleshooting
The following information provides guidance on how to troubleshoot issues with AWS EFS:
-
The AWS EFS Operator and CSI driver run in namespace
openshift-cluster-csi-drivers. To initiate gathering of logs of the AWS EFS Operator and CSI driver, run the following command:
$ oc adm must-gather [must-gather ] OUT Using must-gather plugin-in image: quay.io/openshift-release-dev/ocp-v4.0-art-dev@sha256:125f183d13601537ff15b3239df95d47f0a604da2847b561151fedd699f5e3a5 [must-gather ] OUT namespace/openshift-must-gather-xm4wq created [must-gather ] OUT clusterrolebinding.rbac.authorization.k8s.io/must-gather-2bd8x created [must-gather ] OUT pod for plug-in image quay.io/openshift-release-dev/ocp-v4.0-art-dev@sha256:125f183d13601537ff15b3239df95d47f0a604da2847b561151fedd699f5e3a5 createdTo show AWS EFS Operator errors, view the
ClusterCSIDriverstatus:$ oc get clustercsidriver efs.csi.aws.com -o yamlIf a volume cannot be mounted to a pod (as shown in the output of the following command):
$ oc describe pod ... Type Reason Age From Message ---- ------ ---- ---- ------- Normal Scheduled 2m13s default-scheduler Successfully assigned default/efs-app to ip-10-0-135-94.ec2.internal Warning FailedMount 13s kubelet MountVolume.SetUp failed for volume "pvc-d7c097e6-67ec-4fae-b968-7e7056796449" : rpc error: code = DeadlineExceeded desc = context deadline exceeded1 Warning FailedMount 10s kubelet Unable to attach or mount volumes: unmounted volumes=[persistent-storage], unattached volumes=[persistent-storage kube-api-access-9j477]: timed out waiting for the condition- 1
- Warning message indicating volume not mounted.
This error is frequently caused by AWS dropping packets between an OpenShift Container Platform node and AWS EFS.
Check that the following are correct:
- AWS firewall and Security Groups
- Networking: port number and IP addresses
6.9.10. Uninstalling the AWS EFS CSI Driver Operator
All EFS PVs are inaccessible after uninstalling the AWS EFS CSI Driver Operator.
Prerequisites
- Access to the OpenShift Container Platform web console.
Procedure
To uninstall the AWS EFS CSI Driver Operator from the web console:
- Log in to the web console.
- Stop all applications that use AWS EFS PVs.
Delete all AWS EFS PVs:
-
Click Storage
PersistentVolumeClaims. - Select each PVC that is in use by the AWS EFS CSI Driver Operator, click the drop-down menu on the far right of the PVC, and then click Delete PersistentVolumeClaims.
-
Click Storage
Uninstall the AWS EFS CSI Driver:
NoteBefore you can uninstall the Operator, you must remove the CSI driver first.
-
Click Administration
CustomResourceDefinitions ClusterCSIDriver. - On the Instances tab, for efs.csi.aws.com, on the far left side, click the drop-down menu, and then click Delete ClusterCSIDriver.
- When prompted, click Delete.
-
Click Administration
Uninstall the AWS EFS CSI Operator:
-
Click Operators
Installed Operators. - On the Installed Operators page, scroll or type AWS EFS CSI into the Search by name box to find the Operator, and then click it.
-
On the upper, right of the Installed Operators > Operator details page, click Actions
Uninstall Operator. When prompted on the Uninstall Operator window, click the Uninstall button to remove the Operator from the namespace. Any applications deployed by the Operator on the cluster need to be cleaned up manually.
After uninstalling, the AWS EFS CSI Driver Operator is no longer listed in the Installed Operators section of the web console.
-
Click Operators
Before you can destroy a cluster (openshift-install destroy cluster), you must delete the EFS volume in AWS. An OpenShift Container Platform cluster cannot be destroyed when there is an EFS volume that uses the cluster’s VPC. Amazon does not allow deletion of such a VPC.
6.10. Azure Disk CSI Driver Operator
6.10.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for Microsoft Azure Disk Storage.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a CSI Operator and driver.
To create CSI-provisioned PVs that mount to Azure Disk storage assets, OpenShift Container Platform installs the Azure Disk CSI Driver Operator and the Azure Disk CSI driver by default in the openshift-cluster-csi-drivers namespace.
-
The Azure Disk CSI Driver Operator provides a storage class named
managed-csithat you can use to create persistent volume claims (PVCs). The Azure Disk CSI Driver Operator supports dynamic volume provisioning by allowing storage volumes to be created on-demand, eliminating the need for cluster administrators to pre-provision storage. - The Azure Disk CSI driver enables you to create and mount Azure Disk PVs.
6.10.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
OpenShift Container Platform provides automatic migration for the Azure Disk in-tree volume plugin to its equivalent CSI driver. For more information, see CSI automatic migration.
6.10.3. Creating a storage class with storage account type
Storage classes are used to differentiate and delineate storage levels and usages. By defining a storage class, you can obtain dynamically provisioned persistent volumes.
When creating a storage class, you can designate the storage account type. This corresponds to your Azure storage account SKU tier. Valid options are Standard_LRS, Premium_LRS, StandardSSD_LRS, UltraSSD_LRS, Premium_ZRS, and StandardSSD_ZRS. For information about finding your Azure SKU tier, see SKU Types.
ZRS has some region limitations. For information about these limitations, see ZRS limitations.
Prerequisites
- Access to an OpenShift Container Platform cluster with administrator rights
Procedure
Use the following steps to create a storage class with a storage account type.
Create a storage class designating the storage account type using a YAML file similar to the following:
$ oc create -f - << EOF apiVersion: storage.k8s.io/v1 kind: StorageClass metadata: name: <storage-class>1 provisioner: disk.csi.azure.com parameters: skuName: <storage-class-account-type>2 reclaimPolicy: Delete volumeBindingMode: WaitForFirstConsumer allowVolumeExpansion: true EOFEnsure that the storage class was created by listing the storage classes:
$ oc get storageclassExample output
$ oc get storageclass NAME PROVISIONER RECLAIMPOLICY VOLUMEBINDINGMODE ALLOWVOLUMEEXPANSION AGE azurefile-csi file.csi.azure.com Delete Immediate true 68m managed-csi (default) disk.csi.azure.com Delete WaitForFirstConsumer true 68m sc-prem-zrs disk.csi.azure.com Delete WaitForFirstConsumer true 4m25s1 - 1
- New storage class with storage account type.
6.10.4. Machine sets that deploy machines with ultra disks using PVCs
You can create a machine set running on Azure that deploys machines with ultra disks. Ultra disks are high-performance storage that are intended for use with the most demanding data workloads.
Both the in-tree plugin and CSI driver support using PVCs to enable ultra disks. You can also deploy machines with ultra disks as data disks without creating a PVC.
6.10.4.1. Creating machines with ultra disks by using machine sets
You can deploy machines with ultra disks on Azure by editing your machine set YAML file.
Prerequisites
- Have an existing Microsoft Azure cluster.
Procedure
Copy an existing Azure
MachineSetcustom resource (CR) and edit it by running the following command:$ oc edit machineset <machine_set_name>where
<machine_set_name>is the machine set that you want to provision machines with ultra disks.Add the following lines in the positions indicated:
apiVersion: machine.openshift.io/v1beta1 kind: MachineSet spec: template: spec: metadata: labels: disk: ultrassd1 providerSpec: value: ultraSSDCapability: Enabled2 Create a machine set using the updated configuration by running the following command:
$ oc create -f <machine_set_name>.yamlCreate a storage class that contains the following YAML definition:
apiVersion: storage.k8s.io/v1 kind: StorageClass metadata: name: ultra-disk-sc1 parameters: cachingMode: None diskIopsReadWrite: "2000"2 diskMbpsReadWrite: "320"3 kind: managed skuname: UltraSSD_LRS provisioner: disk.csi.azure.com4 reclaimPolicy: Delete volumeBindingMode: WaitForFirstConsumer5 - 1
- Specify the name of the storage class. This procedure uses
ultra-disk-scfor this value. - 2
- Specify the number of IOPS for the storage class.
- 3
- Specify the throughput in MBps for the storage class.
- 4
- For Azure Kubernetes Service (AKS) version 1.21 or later, use
disk.csi.azure.com. For earlier versions of AKS, usekubernetes.io/azure-disk. - 5
- Optional: Specify this parameter to wait for the creation of the pod that will use the disk.
Create a persistent volume claim (PVC) to reference the
ultra-disk-scstorage class that contains the following YAML definition:apiVersion: v1 kind: PersistentVolumeClaim metadata: name: ultra-disk1 spec: accessModes: - ReadWriteOnce storageClassName: ultra-disk-sc2 resources: requests: storage: 4Gi3 Create a pod that contains the following YAML definition:
apiVersion: v1 kind: Pod metadata: name: nginx-ultra spec: nodeSelector: disk: ultrassd1 containers: - name: nginx-ultra image: alpine:latest command: - "sleep" - "infinity" volumeMounts: - mountPath: "/mnt/azure" name: volume volumes: - name: volume persistentVolumeClaim: claimName: ultra-disk2
Verification
Validate that the machines are created by running the following command:
$ oc get machinesThe machines should be in the
Runningstate.For a machine that is running and has a node attached, validate the partition by running the following command:
$ oc debug node/<node_name> -- chroot /host lsblkIn this command,
oc debug node/<node_name>starts a debugging shell on the node<node_name>and passes a command with--. The passed commandchroot /hostprovides access to the underlying host OS binaries, andlsblkshows the block devices that are attached to the host OS machine.
Next steps
To use an ultra disk from within a pod, create a workload that uses the mount point. Create a YAML file similar to the following example:
apiVersion: v1 kind: Pod metadata: name: ssd-benchmark1 spec: containers: - name: ssd-benchmark1 image: nginx ports: - containerPort: 80 name: "http-server" volumeMounts: - name: lun0p1 mountPath: "/tmp" volumes: - name: lun0p1 hostPath: path: /var/lib/lun0p1 type: DirectoryOrCreate nodeSelector: disktype: ultrassd
6.10.4.2. Troubleshooting resources for machine sets that enable ultra disks
Use the information in this section to understand and recover from issues you might encounter.
6.10.4.2.1. Unable to mount a persistent volume claim backed by an ultra disk
If there is an issue mounting a persistent volume claim backed by an ultra disk, the pod becomes stuck in the ContainerCreating state and an alert is triggered.
For example, if the additionalCapabilities.ultraSSDEnabled parameter is not set on the machine that backs the node that hosts the pod, the following error message appears:
StorageAccountType UltraSSD_LRS can be used only when additionalCapabilities.ultraSSDEnabled is set.To resolve this issue, describe the pod by running the following command:
$ oc -n <stuck_pod_namespace> describe pod <stuck_pod_name>
6.11. Azure File CSI Driver Operator
6.11.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) by using the Container Storage Interface (CSI) driver for Microsoft Azure File Storage.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a CSI Operator and driver.
To create CSI-provisioned PVs that mount to Azure File storage assets, OpenShift Container Platform installs the Azure File CSI Driver Operator and the Azure File CSI driver by default in the openshift-cluster-csi-drivers namespace.
-
The Azure File CSI Driver Operator provides a storage class that is named
azurefile-csithat you can use to create persistent volume claims (PVCs). - The Azure File CSI driver enables you to create and mount Azure File PVs. The Azure File CSI driver supports dynamic volume provisioning by allowing storage volumes to be created on-demand, eliminating the need for cluster administrators to pre-provision storage.
Azure File CSI Driver Operator does not support:
- Virtual hard disks (VHD)
- Network File System (NFS): OpenShift Container Platform does not deploy a NFS-backed storage class.
- Running on nodes with FIPS mode enabled.
For more information about supported features, see Supported CSI drivers and features.
6.11.2. NFS support
OpenShift Container Platform supports the Azure File Container Storage Interface (CSI) Driver Operator with Network File System (NFS) with the following restrictions:
Creating pods with Azure File NFS volumes that are scheduled to the control plane node causes the mount to be denied.
To work around this issue: If your control plane nodes are schedulable, and the pods can run on worker nodes, use
nodeSelectoror Affinity to schedule the pod in worker nodes.FS Group policy behavior:
ImportantAzure File CSI with NFS does not honor the
fsGroupChangePolicyrequested by pods. Azure File CSI with NFS applies a defaultOnRootMismatchFS Group policy regardless of the policy requested by the pod.The Azure File CSI Operator does not automatically create a storage class for NFS. You must create it manually. Use a file similar to the following:
apiVersion: storage.k8s.io/v1 kind: StorageClass metadata: name: <storage-class-name>1 provisioner: file.csi.azure.com2 parameters: protocol: nfs3 skuName: Premium_LRS # available values: Premium_LRS, Premium_ZRS mountOptions: - nconnect=4
6.11.3. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
Additional resources
6.12. Azure Stack Hub CSI Driver Operator
6.12.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for Azure Stack Hub Storage. Azure Stack Hub, which is part of the Azure Stack portfolio, allows you to run apps in an on-premise environment and deliver Azure services in your datacenter.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a CSI Operator and driver.
To create CSI-provisioned PVs that mount to Azure Stack Hub storage assets, OpenShift Container Platform installs the Azure Stack Hub CSI Driver Operator and the Azure Stack Hub CSI driver by default in the openshift-cluster-csi-drivers namespace.
-
The Azure Stack Hub CSI Driver Operator provides a storage class (
managed-csi), with "Standard_LRS" as the default storage account type, that you can use to create persistent volume claims (PVCs). The Azure Stack Hub CSI Driver Operator supports dynamic volume provisioning by allowing storage volumes to be created on-demand, eliminating the need for cluster administrators to pre-provision storage. - The Azure Stack Hub CSI driver enables you to create and mount Azure Stack Hub PVs.
6.12.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
6.13. GCP PD CSI Driver Operator
6.13.1. Overview
OpenShift Container Platform can provision persistent volumes (PVs) using the Container Storage Interface (CSI) driver for Google Cloud Platform (GCP) persistent disk (PD) storage.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a Container Storage Interface (CSI) Operator and driver.
To create CSI-provisioned persistent volumes (PVs) that mount to GCP PD storage assets, OpenShift Container Platform installs the GCP PD CSI Driver Operator and the GCP PD CSI driver by default in the openshift-cluster-csi-drivers namespace.
- GCP PD CSI Driver Operator: By default, the Operator provides a storage class that you can use to create PVCs. You also have the option to create the GCP PD storage class as described in Persistent storage using GCE Persistent Disk.
- GCP PD driver: The driver enables you to create and mount GCP PD PVs.
OpenShift Container Platform provides automatic migration for the GCE Persistent Disk in-tree volume plugin to its equivalent CSI driver. For more information, see CSI automatic migration.
6.13.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
6.13.3. GCP PD CSI driver storage class parameters
The Google Cloud Platform (GCP) persistent disk (PD) Container Storage Interface (CSI) driver uses the CSI external-provisioner sidecar as a controller. This is a separate helper container that is deployed with the CSI driver. The sidecar manages persistent volumes (PVs) by triggering the CreateVolume operation.
The GCP PD CSI driver uses the csi.storage.k8s.io/fstype parameter key to support dynamic provisioning. The following table describes all the GCP PD CSI storage class parameters that are supported by OpenShift Container Platform.
| Parameter | Values | Default | Description |
|---|---|---|---|
|
|
|
| Allows you to choose between standard PVs or solid-state-drive PVs. The driver does not validate the value, thus all the possible values are accepted. |
|
|
|
| Allows you to choose between zonal or regional PVs. |
|
| Fully qualified resource identifier for the key to use to encrypt new disks. | Empty string | Uses customer-managed encryption keys (CMEK) to encrypt new disks. |
6.13.4. Creating a custom-encrypted persistent volume
When you create a PersistentVolumeClaim object, OpenShift Container Platform provisions a new persistent volume (PV) and creates a PersistentVolume object. You can add a custom encryption key in Google Cloud Platform (GCP) to protect a PV in your cluster by encrypting the newly created PV.
For encryption, the newly attached PV that you create uses customer-managed encryption keys (CMEK) on a cluster by using a new or existing Google Cloud Key Management Service (KMS) key.
Prerequisites
- You are logged in to a running OpenShift Container Platform cluster.
- You have created a Cloud KMS key ring and key version.
For more information about CMEK and Cloud KMS resources, see Using customer-managed encryption keys (CMEK).
Procedure
To create a custom-encrypted PV, complete the following steps:
Create a storage class with the Cloud KMS key. The following example enables dynamic provisioning of encrypted volumes:
apiVersion: storage.k8s.io/v1 kind: StorageClass metadata: name: csi-gce-pd-cmek provisioner: pd.csi.storage.gke.io volumeBindingMode: "WaitForFirstConsumer" allowVolumeExpansion: true parameters: type: pd-standard disk-encryption-kms-key: projects/<key-project-id>/locations/<location>/keyRings/<key-ring>/cryptoKeys/<key>1 - 1
- This field must be the resource identifier for the key that will be used to encrypt new disks. Values are case-sensitive. For more information about providing key ID values, see Retrieving a resource’s ID and Getting a Cloud KMS resource ID.
NoteYou cannot add the
disk-encryption-kms-keyparameter to an existing storage class. However, you can delete the storage class and recreate it with the same name and a different set of parameters. If you do this, the provisioner of the existing class must bepd.csi.storage.gke.io.Deploy the storage class on your OpenShift Container Platform cluster using the
occommand:$ oc describe storageclass csi-gce-pd-cmekExample output
Name: csi-gce-pd-cmek IsDefaultClass: No Annotations: None Provisioner: pd.csi.storage.gke.io Parameters: disk-encryption-kms-key=projects/key-project-id/locations/location/keyRings/ring-name/cryptoKeys/key-name,type=pd-standard AllowVolumeExpansion: true MountOptions: none ReclaimPolicy: Delete VolumeBindingMode: WaitForFirstConsumer Events: noneCreate a file named
pvc.yamlthat matches the name of your storage class object that you created in the previous step:kind: PersistentVolumeClaim apiVersion: v1 metadata: name: podpvc spec: accessModes: - ReadWriteOnce storageClassName: csi-gce-pd-cmek resources: requests: storage: 6GiNoteIf you marked the new storage class as default, you can omit the
storageClassNamefield.Apply the PVC on your cluster:
$ oc apply -f pvc.yamlGet the status of your PVC and verify that it is created and bound to a newly provisioned PV:
$ oc get pvcExample output
NAME STATUS VOLUME CAPACITY ACCESS MODES STORAGECLASS AGE podpvc Bound pvc-e36abf50-84f3-11e8-8538-42010a800002 10Gi RWO csi-gce-pd-cmek 9sNoteIf your storage class has the
volumeBindingModefield set toWaitForFirstConsumer, you must create a pod to use the PVC before you can verify it.
Your CMEK-protected PV is now ready to use with your OpenShift Container Platform cluster.
6.14. Google Compute Platform Filestore CSI Driver Operator
6.14.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for Google Compute Platform (GCP) Filestore Storage.
GCP Filestore CSI Driver Operator is a Technology Preview feature only. Technology Preview features are not supported with Red Hat production service level agreements (SLAs) and might not be functionally complete. Red Hat does not recommend using them in production. These features provide early access to upcoming product features, enabling customers to test functionality and provide feedback during the development process.
For more information about the support scope of Red Hat Technology Preview features, see Technology Preview Features Support Scope.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a CSI Operator and driver.
To create CSI-provisioned PVs that mount to GCP Filestore Storage assets, you install the GCP Filestore CSI Driver Operator and the GCP Filestore CSI driver in the openshift-cluster-csi-drivers namespace.
- The GCP Filestore CSI Driver Operator does not provide a storage class by default, but you can create one if needed. The GCP Filestore CSI Driver Operator supports dynamic volume provisioning by allowing storage volumes to be created on demand, eliminating the need for cluster administrators to pre-provision storage.
- The GCP Filestore CSI driver enables you to create and mount GCP Filestore PVs.
6.14.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
6.14.3. Installing the GCP Filestore CSI Driver Operator
The Google Compute Platform (GCP) Filestore Container Storage Interface (CSI) Driver Operator is not installed in OpenShift Container Platform by default. Use the following procedure to install the GCP Filestore CSI Driver Operator in your cluster.
Prerequisites
- Access to the OpenShift Container Platform web console.
Procedure
To install the GCP Filestore CSI Driver Operator from the web console:
- Log in to the web console.
Enable the Filestore API in the GCE project by running the following command:
$ gcloud services enable file.googleapis.com --project <my_gce_project>1 - 1
- Replace
<my_gce_project>with your Google Cloud project.
You can also do this using Google Cloud web console.
Install the GCP Filestore CSI Operator:
-
Click Operators
OperatorHub. - Locate the GCP Filestore CSI Operator by typing GCP Filestore in the filter box.
- Click the GCP Filestore CSI Driver Operator button.
- On the GCP Filestore CSI Driver Operator page, click Install.
On the Install Operator page, ensure that:
- All namespaces on the cluster (default) is selected.
- Installed Namespace is set to openshift-cluster-csi-drivers.
Click Install.
After the installation finishes, the GCP Filestore CSI Operator is listed in the Installed Operators section of the web console.
-
Click Operators
Install the GCP Filestore CSI Driver:
-
Click administration
CustomResourceDefinitions ClusterCSIDriver. On the Instances tab, click Create ClusterCSIDriver.
Use the following YAML file:
apiVersion: operator.openshift.io/v1 kind: ClusterCSIDriver metadata: name: filestore.csi.storage.gke.io spec: managementState: Managed- Click Create.
Wait for the following Conditions to change to a "true" status:
- GCPFilestoreDriverCredentialsRequestControllerAvailable
- GCPFilestoreDriverNodeServiceControllerAvailable
- GCPFilestoreDriverControllerServiceControllerAvailable
-
Click administration
6.14.4. Creating a storage class for GCP Filestore Storage
After installing the Operator, you should create a storage class for dynamic provisioning of Google Compute Platform (GCP) Filestore volumes.
Prerequisites
- You are logged in to the running OpenShift Container Platform cluster.
Procedure
To create a storage class:
Create a storage class using the following example YAML file:
Example YAML file
kind: StorageClass apiVersion: storage.k8s.io/v1 metadata: name: filestore-csi provisioner: filestore.csi.storage.gke.io parameters: network: network-name1 allowVolumeExpansion: true volumeBindingMode: WaitForFirstConsumer- 1
- Specify the name of the GCP virtual private cloud (VPC) network where Filestore instances should be created in.
Specify the name of the VPC network where Filestore instances should be created in.
It is recommended to specify the VPC network that the Filestore instances should be created in. If no VPC network is specified, the Container Storage Interface (CSI) driver tries to create the instances in the default VPC network of the project. On IPI installations, the VPC network name is typically the cluster name with the suffix "-network". However, on UPI installations, the VPC network name can be any value chosen by the user.
You can find out the VPC network name by inspecting the
MachineSetsobjects with the following command:$ oc -n openshift-machine-api get machinesets -o yaml | grep "network:" - network: gcp-filestore-network (...)In this example, the VPC network name in this cluster is "gcp-filestore-network".
6.14.5. Destroying clusters and GCP Filestore
Typically, if you destroy a cluster, the OpenShift Container Platform installer deletes all of the cloud resources that belong to that cluster. However, when a cluster is destroyed, Google Compute Platform (GCP) Filestore instances are not automatically deleted, so you must manually delete all persistent volume claims (PVCs) that use the Filestore storage class before destroying the cluster.
Procedure
To delete all GCP Filestore PVCs:
List all PVCs that were created using the storage class
filestore-csi:$ oc get pvc -o json -A | jq -r '.items[] | select(.spec.storageClassName == "filestore-csi")Delete all of the PVCs listed by the previous command:
$ oc delete <pvc-name>1 - 1
- Replace <pvc-name> with the name of any PVC that you need to delete.
6.15. IBM VPC Block CSI Driver Operator
6.15.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for IBM Virtual Private Cloud (VPC) Block Storage.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a CSI Operator and driver.
To create CSI-provisioned PVs that mount to IBM VPC Block storage assets, OpenShift Container Platform installs the IBM VPC Block CSI Driver Operator and the IBM VPC Block CSI driver by default in the openshift-cluster-csi-drivers namespace.
-
The IBM VPC Block CSI Driver Operator provides three storage classes named
ibmc-vpc-block-10iops-tier(default),ibmc-vpc-block-5iops-tier, andibmc-vpc-block-customfor different tiers that you can use to create persistent volume claims (PVCs). The IBM VPC Block CSI Driver Operator supports dynamic volume provisioning by allowing storage volumes to be created on demand, eliminating the need for cluster administrators to pre-provision storage. - The IBM VPC Block CSI driver enables you to create and mount IBM VPC Block PVs.
6.15.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
Additional resources
6.16. OpenStack Cinder CSI Driver Operator
6.16.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for OpenStack Cinder.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a Container Storage Interface (CSI) Operator and driver.
To create CSI-provisioned PVs that mount to OpenStack Cinder storage assets, OpenShift Container Platform installs the OpenStack Cinder CSI Driver Operator and the OpenStack Cinder CSI driver in the openshift-cluster-csi-drivers namespace.
- The OpenStack Cinder CSI Driver Operator provides a CSI storage class that you can use to create PVCs.
- The OpenStack Cinder CSI driver enables you to create and mount OpenStack Cinder PVs.
OpenShift Container Platform provides automatic migration for the Cinder in-tree volume plugin to its equivalent CSI driver. For more information, see CSI automatic migration.
6.16.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
OpenShift Container Platform defaults to using an in-tree (non-CSI) plugin to provision Cinder storage.
In future OpenShift Container Platform versions, volumes provisioned using existing in-tree plugins are planned for migration to their equivalent CSI driver. CSI automatic migration should be seamless. Migration does not change how you use all existing API objects, such as persistent volumes, persistent volume claims, and storage classes. For more information about migration, see CSI automatic migration.
After full migration, in-tree plugins will eventually be removed in future versions of OpenShift Container Platform.
6.16.3. Making OpenStack Cinder CSI the default storage class
The OpenStack Cinder CSI driver uses the cinder.csi.openstack.org parameter key to support dynamic provisioning.
To enable OpenStack Cinder CSI provisioning in OpenShift Container Platform, it is recommended that you overwrite the default in-tree storage class with standard-csi. Alternatively, you can create the persistent volume claim (PVC) and specify the storage class as "standard-csi".
In OpenShift Container Platform, the default storage class references the in-tree Cinder driver. However, with CSI automatic migration enabled, volumes created using the default storage class actually use the CSI driver.
Procedure
Use the following steps to apply the standard-csi storage class by overwriting the default in-tree storage class.
List the storage class:
$ oc get storageclassExample output
NAME PROVISIONER RECLAIMPOLICY VOLUMEBINDINGMODE ALLOWVOLUMEEXPANSION AGE standard(default) cinder.csi.openstack.org Delete WaitForFirstConsumer true 46h standard-csi kubernetes.io/cinder Delete WaitForFirstConsumer true 46hChange the value of the annotation
storageclass.kubernetes.io/is-default-classtofalsefor the default storage class, as shown in the following example:$ oc patch storageclass standard -p '{"metadata": {"annotations": {"storageclass.kubernetes.io/is-default-class": "false"}}}'Make another storage class the default by adding or modifying the annotation as
storageclass.kubernetes.io/is-default-class=true.$ oc patch storageclass standard-csi -p '{"metadata": {"annotations": {"storageclass.kubernetes.io/is-default-class": "true"}}}'Verify that the PVC is now referencing the CSI storage class by default:
$ oc get storageclassExample output
NAME PROVISIONER RECLAIMPOLICY VOLUMEBINDINGMODE ALLOWVOLUMEEXPANSION AGE standard kubernetes.io/cinder Delete WaitForFirstConsumer true 46h standard-csi(default) cinder.csi.openstack.org Delete WaitForFirstConsumer true 46hOptional: You can define a new PVC without having to specify the storage class:
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: cinder-claim spec: accessModes: - ReadWriteOnce resources: requests: storage: 1GiA PVC that does not specify a specific storage class is automatically provisioned by using the default storage class.
Optional: After the new file has been configured, create it in your cluster:
$ oc create -f cinder-claim.yaml
6.17. OpenStack Manila CSI Driver Operator
6.17.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for the OpenStack Manila shared file system service.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a Container Storage Interface (CSI) Operator and driver.
To create CSI-provisioned PVs that mount to Manila storage assets, OpenShift Container Platform installs the Manila CSI Driver Operator and the Manila CSI driver by default on any OpenStack cluster that has the Manila service enabled.
-
The Manila CSI Driver Operator creates the required storage class that is needed to create PVCs for all available Manila share types. The Operator is installed in the
openshift-cluster-csi-driversnamespace. -
The Manila CSI driver enables you to create and mount Manila PVs. The driver is installed in the
openshift-manila-csi-drivernamespace.
6.17.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
6.17.3. Manila CSI Driver Operator limitations
The following limitations apply to the Manila Container Storage Interface (CSI) Driver Operator:
- Only NFS is supported
- OpenStack Manila supports many network-attached storage protocols, such as NFS, CIFS, and CEPHFS, and these can be selectively enabled in the OpenStack cloud. The Manila CSI Driver Operator in OpenShift Container Platform only supports using the NFS protocol. If NFS is not available and enabled in the underlying OpenStack cloud, you cannot use the Manila CSI Driver Operator to provision storage for OpenShift Container Platform.
- Snapshots are not supported if the back end is CephFS-NFS
-
To take snapshots of persistent volumes (PVs) and revert volumes to snapshots, you must ensure that the Manila share type that you are using supports these features. A Red Hat OpenStack administrator must enable support for snapshots (
share type extra-spec snapshot_support) and for creating shares from snapshots (share type extra-spec create_share_from_snapshot_support) in the share type associated with the storage class you intend to use. - FSGroups are not supported
-
Since Manila CSI provides shared file systems for access by multiple readers and multiple writers, it does not support the use of FSGroups. This is true even for persistent volumes created with the ReadWriteOnce access mode. It is therefore important not to specify the
fsTypeattribute in any storage class that you manually create for use with Manila CSI Driver.
In Red Hat OpenStack Platform 16.x and 17.x, the Shared File Systems service (Manila) with CephFS through NFS fully supports serving shares to OpenShift Container Platform through the Manila CSI. However, this solution is not intended for massive scale. Be sure to review important recommendations in CephFS NFS Manila-CSI Workload Recommendations for Red Hat OpenStack Platform.
6.17.4. Dynamically provisioning Manila CSI volumes
OpenShift Container Platform installs a storage class for each available Manila share type.
The YAML files that are created are completely decoupled from Manila and from its Container Storage Interface (CSI) plugin. As an application developer, you can dynamically provision ReadWriteMany (RWX) storage and deploy pods with applications that safely consume the storage using YAML manifests.
You can use the same pod and persistent volume claim (PVC) definitions on-premise that you use with OpenShift Container Platform on AWS, Google Cloud, Azure, and other platforms, with the exception of the storage class reference in the PVC definition.
By default the access-rule assigned to a volume is set to 0.0.0.0/0. To limit the clients that can mount the persistent volume (PV), create a new storage class with an IP or a subnet mask in the nfs-shareClient storage class parameter.
Manila service is optional. If the service is not enabled in Red Hat OpenStack Platform (RHOSP), the Manila CSI driver is not installed and the storage classes for Manila are not created.
Prerequisites
- RHOSP is deployed with appropriate Manila share infrastructure so that it can be used to dynamically provision and mount volumes in OpenShift Container Platform.
Procedure (UI)
To dynamically create a Manila CSI volume using the web console:
-
In the OpenShift Container Platform console, click Storage
Persistent Volume Claims. - In the persistent volume claims overview, click Create Persistent Volume Claim.
Define the required options on the resulting page.
- Select the appropriate storage class.
- Enter a unique name for the storage claim.
Select the access mode to specify read and write access for the PVC you are creating.
ImportantUse RWX if you want the PV that fulfills this PVC to be mounted to multiple pods on multiple nodes in the cluster.
- Define the size of the storage claim.
- Click Create to create the PVC and generate a PV.
Procedure (CLI)
To dynamically create a Manila CSI volume using the command-line interface (CLI):
Create and save a file with the
PersistentVolumeClaimobject described by the following YAML:pvc-manila.yaml
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: pvc-manila spec: accessModes:1 - ReadWriteMany resources: requests: storage: 10Gi storageClassName: csi-manila-gold2 Create the object you saved in the previous step by running the following command:
$ oc create -f pvc-manila.yamlA new PVC is created.
To verify that the volume was created and is ready, run the following command:
$ oc get pvc pvc-manilaThe
pvc-manilashows that it isBound.
You can now use the new PVC to configure a pod.
6.18. Red Hat Virtualization CSI Driver Operator
6.18.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for Red Hat Virtualization (RHV).
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a Container Storage Interface (CSI) Operator and driver.
To create CSI-provisioned PVs that mount to RHV storage assets, OpenShift Container Platform installs the oVirt CSI Driver Operator and the oVirt CSI driver by default in the openshift-cluster-csi-drivers namespace.
-
The oVirt CSI Driver Operator provides a default
StorageClassobject that you can use to create Persistent Volume Claims (PVCs). - The oVirt CSI driver enables you to create and mount oVirt PVs.
6.18.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
The oVirt CSI driver does not support snapshots.
6.18.3. Red Hat Virtualization (RHV) CSI driver storage class
OpenShift Container Platform creates a default object of type StorageClass named ovirt-csi-sc which is used for creating dynamically provisioned persistent volumes.
To create additional storage classes for different configurations, create and save a file with the StorageClass object described by the following sample YAML:
ovirt-storageclass.yaml
apiVersion: storage.k8s.io/v1
kind: StorageClass
metadata:
name: <storage_class_name>
annotations:
storageclass.kubernetes.io/is-default-class: "<boolean>"
provisioner: csi.ovirt.org
allowVolumeExpansion: <boolean>
reclaimPolicy: Delete
volumeBindingMode: Immediate
parameters:
storageDomainName: <rhv-storage-domain-name>
thinProvisioning: "<boolean>"
csi.storage.k8s.io/fstype: <file_system_type> - 1
- Name of the storage class.
- 2
- Set to
falseif the storage class is the default storage class in the cluster. If set totrue, the existing default storage class must be edited and set tofalse. - 3
trueenables dynamic volume expansion,falseprevents it.trueis recommended.- 4
- Dynamically provisioned persistent volumes of this storage class are created with this reclaim policy. This default policy is
Delete. - 5
- Indicates how to provision and bind
PersistentVolumeClaims. When not set,VolumeBindingImmediateis used. This field is only applied by servers that enable theVolumeSchedulingfeature. - 6
- The RHV storage domain name to use.
- 7
- If
true, the disk is thin provisioned. Iffalse, the disk is preallocated. Thin provisioning is recommended. - 8
- Optional: File system type to be created. Possible values:
ext4(default) orxfs.
6.18.4. Creating a persistent volume on RHV
When you create a PersistentVolumeClaim (PVC) object, OpenShift Container Platform provisions a new persistent volume (PV) and creates a PersistentVolume object.
Prerequisites
- You are logged in to a running OpenShift Container Platform cluster.
-
You provided the correct RHV credentials in
ovirt-credentialssecret. - You have installed the oVirt CSI driver.
- You have defined at least one storage class.
Procedure
If you are using the web console to dynamically create a persistent volume on RHV:
-
In the OpenShift Container Platform console, click Storage
Persistent Volume Claims. - In the persistent volume claims overview, click Create Persistent Volume Claim.
- Define the required options on the resulting page.
-
Select the appropriate
StorageClassobject, which isovirt-csi-scby default. - Enter a unique name for the storage claim.
- Select the access mode. Currently, RWO (ReadWriteOnce) is the only supported access mode.
- Define the size of the storage claim.
Select the Volume Mode:
Filesystem: Mounted into pods as a directory. This mode is the default.Block: Block device, without any file system on it-
Click Create to create the
PersistentVolumeClaimobject and generate aPersistentVolumeobject.
-
In the OpenShift Container Platform console, click Storage
If you are using the command-line interface (CLI) to dynamically create a RHV CSI volume:
Create and save a file with the
PersistentVolumeClaimobject described by the following sample YAML:pvc-ovirt.yaml
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: pvc-ovirt spec: storageClassName: ovirt-csi-sc1 accessModes: - ReadWriteOnce resources: requests: storage: <volume size>2 volumeMode: <volume mode>3 Create the object you saved in the previous step by running the following command:
$ oc create -f pvc-ovirt.yamlTo verify that the volume was created and is ready, run the following command:
$ oc get pvc pvc-ovirtThe
pvc-ovirtshows that it is Bound.
If you need to update the Operator credentials, see the instructions in How to modify the RHV credentials in OCP 4.
6.19. VMware vSphere CSI Driver Operator
6.19.1. Overview
OpenShift Container Platform can provision persistent volumes (PVs) using the Container Storage Interface (CSI) VMware vSphere driver for Virtual Machine Disk (VMDK) volumes.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a CSI Operator and driver.
To create CSI-provisioned persistent volumes (PVs) that mount to vSphere storage assets, OpenShift Container Platform installs the vSphere CSI Driver Operator and the vSphere CSI driver by default in the openshift-cluster-csi-drivers namespace.
-
vSphere CSI Driver Operator: The Operator provides a storage class, called
thin-csi, that you can use to create persistent volumes claims (PVCs). The vSphere CSI Driver Operator supports dynamic volume provisioning by allowing storage volumes to be created on-demand, eliminating the need for cluster administrators to pre-provision storage. - vSphere CSI driver: The driver enables you to create and mount vSphere PVs. In OpenShift Container Platform 4.12.21, and later, the driver version is 2.7.1. The version is 2.6.1 in OpenShift Container Platform 4.12 versions earlier than 4.12.21. The vSphere CSI driver supports all of the file systems supported by the underlying Red Hat Core OS release, including XFS and Ext4. For more information about supported file systems, see Overview of available file systems.
OpenShift Container Platform defaults to using an in-tree (non-CSI) plugin to provision vSphere storage.
In future OpenShift Container Platform versions, volumes provisioned using existing in-tree plugins are planned for migration to their equivalent CSI driver. CSI automatic migration should be seamless. Migration does not change how you use all existing API objects, such as persistent volumes, persistent volume claims, and storage classes. For more information about migration, see CSI automatic migration.
After full migration, in-tree plugins will eventually be removed in future versions of OpenShift Container Platform.
6.19.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
6.19.3. vSphere CSI limitations
The following limitations apply to the vSphere Container Storage Interface (CSI) Driver Operator:
-
The vSphere CSI Driver supports dynamic and static provisioning. However, when using static provisioning in the PV specifications, do not use the key
storage.kubernetes.io/csiProvisionerIdentityincsi.volumeAttributesbecause this key indicates dynamically provisioned PVs. - Migrating persistent container volumes between datastores using the vSphere client interface is not supported with OpenShift Container Platform.
6.19.4. vSphere storage policy
The vSphere CSI Driver Operator storage class uses vSphere’s storage policy. OpenShift Container Platform automatically creates a storage policy that targets datastore configured in cloud configuration:
kind: StorageClass
apiVersion: storage.k8s.io/v1
metadata:
name: thin-csi
provisioner: csi.vsphere.vmware.com
parameters:
StoragePolicyName: "$openshift-storage-policy-xxxx"
volumeBindingMode: WaitForFirstConsumer
allowVolumeExpansion: false
reclaimPolicy: Delete6.19.5. ReadWriteMany vSphere volume support
If the underlying vSphere environment supports the vSAN file service, then vSphere Container Storage Interface (CSI) Driver Operator installed by OpenShift Container Platform supports provisioning of ReadWriteMany (RWX) volumes. If vSAN file service is not configured, then ReadWriteOnce (RWO) is the only access mode available. If you do not have vSAN file service configured, and you request RWX, the volume fails to get created and an error is logged.
For more information about configuring the vSAN file service in your environment, see vSAN File Service.
You can request RWX volumes by making the following persistent volume claim (PVC):
kind: PersistentVolumeClaim
apiVersion: v1
metadata:
name: myclaim
spec:
resources:
requests:
storage: 1Gi
accessModes:
- ReadWriteMany
storageClassName: thin-csiRequesting a PVC of the RWX volume type should result in provisioning of persistent volumes (PVs) backed by the vSAN file service.
6.19.6. VMware vSphere CSI Driver Operator requirements
To install the vSphere CSI Driver Operator, the following requirements must be met:
- VMware vSphere version: 7.0 Update 2 or later, or VMware Cloud Foundation 4.3 or later; 8.0 Update 1 or later, or VMware Cloud Foundation 5.0 or later
- vCenter version: 7.0 Update 2 or later, or VMware Cloud Foundation 4.3 or later; 8.0 Update 1 or later, or VMware Cloud Foundation 5.0 or later
- Virtual machines of hardware version 15 or later
- No third-party vSphere CSI driver already installed in the cluster
If a third-party vSphere CSI driver is present in the cluster, OpenShift Container Platform does not overwrite it. The presence of a third-party vSphere CSI driver prevents OpenShift Container Platform from updating to OpenShift Container Platform 4.13 or later.
The VMware vSphere CSI Driver Operator is supported only on clusters deployed with platform: vsphere in the installation manifest.
To remove a third-party CSI driver, see Removing a third-party vSphere CSI Driver.
6.19.7. Removing a third-party vSphere CSI Driver Operator
OpenShift Container Platform 4.10, and later, includes a built-in version of the vSphere Container Storage Interface (CSI) Operator Driver that is supported by Red Hat. If you have installed a vSphere CSI driver provided by the community or another vendor, updates to the next major version of OpenShift Container Platform, such as 4.13, or later, might be disabled for your cluster.
OpenShift Container Platform 4.12, and later, clusters are still fully supported, and updates to z-stream releases of 4.12, such as 4.12.z, are not blocked, but you must correct this state by removing the third-party vSphere CSI Driver before updates to next major version of OpenShift Container Platform can occur. Removing the third-party vSphere CSI driver does not require deletion of associated persistent volume (PV) objects, and no data loss should occur.
These instructions may not be complete, so consult the vendor or community provider uninstall guide to ensure removal of the driver and components.
To uninstall the third-party vSphere CSI Driver:
- Delete the third-party vSphere CSI Driver (VMware vSphere Container Storage Plugin) Deployment and Daemonset objects.
- Delete the configmap and secret objects that were installed previously with the third-party vSphere CSI Driver.
Delete the third-party vSphere CSI driver
CSIDriverobject:~ $ oc delete CSIDriver csi.vsphere.vmware.comcsidriver.storage.k8s.io "csi.vsphere.vmware.com" deleted
After you have removed the third-party vSphere CSI Driver from the OpenShift Container Platform cluster, installation of Red Hat’s vSphere CSI Driver Operator automatically resumes, and any conditions that could block upgrades to OpenShift Container Platform 4.11, or later, are automatically removed. If you had existing vSphere CSI PV objects, their lifecycle is now managed by Red Hat’s vSphere CSI Driver Operator.
6.19.8. Configuring vSphere CSI Topology
OpenShift Container Platform provides the ability to deploy OpenShift Container Platform for vSphere on different zones and regions, which allows you to deploy over multiple compute clusters, thus helping to avoid a single point of failure.
OpenShift Container Platform on vSphere does not support multiple Datacenters.
This is accomplished by defining zone and region categories in vCenter, and then assigning these categories to different failure domains, such as a compute cluster, by creating tags for these zone and region categories. After you have created the appropriate categories, and assigned tags to vCenter objects, you can create additional machinesets that create virtual machines (VMs) that are responsible for scheduling pods in those failure domains.
Procedure
In the VMware vCenter vSphere client GUI, define appropriate zone and region catagories and tags.
While vSphere allows you to create categories with any arbitrary name, OpenShift Container Platform strongly recommends use of
openshift-regionandopenshift-zonenames for defining topology.The following example defines two failure domains with one region and two zones:
Expand Table 6.4. vSphere topology with one region and two zones Compute cluster Failure domain Description Compute cluster: ocp1, Datacenter: Atlanta
openshift-region: us-east-1 (tag), openshift-zone: us-east-1a (tag)
This defines a failure domain in region us-east-1 with zone us-east-1a.
Computer cluster: ocp2, Datacenter: Atlanta
openshift-region: us-east-1 (tag), openshift-zone: us-east-1b (tag)
This defines a different failure domain within the same region called us-east-1b.
For more information about vSphere categories and tags, see the VMware vSphere documentation.
To allow the container storage interface (CSI) driver to detect this topology, edit the
clusterCSIDriverobject YAML filedriverConfigsection:-
Specify the
openshift-zoneandopenshift-regioncategories that you created earlier. Set
driverTypetovSphere.~ $ oc edit clustercsidriver csi.vsphere.vmware.com -o yamlExample output
apiVersion: operator.openshift.io/v1 kind: ClusterCSIDriver metadata: name: csi.vsphere.vmware.com spec: logLevel: Normal managementState: Managed observedConfig: null operatorLogLevel: Normal unsupportedConfigOverrides: null driverConfig: driverType: vSphere1 vSphere: topologyCategories:2 - openshift-zone - openshift-region
-
Specify the
Verify that
CSINodeobject has topology keys by running the following commands:~ $ oc get csinodeExample output
NAME DRIVERS AGE co8-4s88d-infra-2m5vd 1 27m co8-4s88d-master-0 1 70m co8-4s88d-master-1 1 70m co8-4s88d-master-2 1 70m co8-4s88d-worker-j2hmg 1 47m co8-4s88d-worker-mbb46 1 47m co8-4s88d-worker-zlk7d 1 47m~ $ oc get csinode co8-4s88d-worker-j2hmg -o yamlExample output
... spec: drivers: - allocatable: count: 59 name: csi-vsphere.vmware.com nodeID: co8-4s88d-worker-j2hmg topologyKeys:1 - topology.csi.vmware.com/openshift-zone - topology.csi.vmware.com/openshift-region- 1
- Topology keys from vSphere
openshift-zoneandopenshift-regioncatagories.
NoteCSINodeobjects might take some time to receive updated topology information. After the driver is updated,CSINodeobjects should have topology keys in them.Create a tag to assign to datastores across failure domains:
When an OpenShift Container Platform spans more than one failure domain, the datastore might not be shared across those failure domains, which is where topology-aware provisioning of persistent volumes (PVs) is useful.
-
In vCenter, create a category for tagging the datastores. For example,
openshift-zonal-datastore-cat. You can use any other category name, provided the category uniquely is used for tagging datastores participating in OpenShift Container Platform cluster. Also, ensure thatStoragePod,Datastore, andFolderare selected as Associable Entities for the created category. -
In vCenter, create a tag that uses the previously created category. This example uses the tag name
openshift-zonal-datastore. Assign the previously created tag (in this example
openshift-zonal-datastore) to each datastore in a failure domain that would be considered for dynamic provisioning.NoteYou can use any names you like for categories and tags. The names used in this example are provided as recommendations. Ensure that the tags and categories that you define uniquely identify only datastores that are shared with all hosts in the OpenShift Container Platform cluster.
-
In vCenter, create a category for tagging the datastores. For example,
Create a storage policy that targets the tag-based datastores in each failure domain:
- In vCenter, from the main menu, click Policies and Profiles.
- On the Policies and Profiles page, in the navigation pane, click VM Storage Policies.
- Click CREATE.
- Type a name for the storage policy.
For the rules, choose Tag Placement rules and select the tag and category that targets the desired datastores (in this example, the
openshift-zonal-datastoretag).The datastores are listed in the storage compatibility table.
Create a new storage class that uses the new zoned storage policy:
- Click Storage > StorageClasses.
- On the StorageClasses page, click Create StorageClass.
- Type a name for the new storage class in Name.
- Under Provisioner, select csi.vsphere.vmware.com.
- Under Additional parameters, for the StoragePolicyName parameter, set Value to the name of the new zoned storage policy that you created earlier.
Click Create.
Example output
kind: StorageClass apiVersion: storage.k8s.io/v1 metadata: name: zoned-sc1 provisioner: csi.vsphere.vmware.com parameters: StoragePolicyName: zoned-storage-policy2 reclaimPolicy: Delete allowVolumeExpansion: true volumeBindingMode: WaitForFirstConsumerNoteYou can also create the storage class by editing the preceding YAML file and running the command
oc create -f $FILE.
Results
Creating persistent volume claims (PVCs) and PVs from the topology aware storage class are truly zonal, and should use the datastore in their respective zone depending on how pods are scheduled:
~ $ oc get pv <pv-name> -o yamlExample output
...
nodeAffinity:
required:
nodeSelectorTerms:
- matchExpressions:
- key: topology.csi.vmware.com/openshift-zone
operator: In
values:
- <openshift-zone>
-key: topology.csi.vmware.com/openshift-region
operator: In
values:
- <openshift-region>
...
peristentVolumeclaimPolicy: Delete
storageClassName: <zoned-storage-class-name>
volumeMode: Filesystem
...