Chapter 5. Using Container Storage Interface (CSI)
5.1. Configuring CSI volumes
The Container Storage Interface (CSI) allows OpenShift Dedicated to consume storage from storage back ends that implement the CSI interface as persistent storage.
OpenShift Dedicated 4 supports version 1.6.0 of the CSI specification.
5.1.1. CSI architecture
CSI drivers are typically shipped as container images. These containers are not aware of OpenShift Dedicated where they run. To use CSI-compatible storage back end in OpenShift Dedicated, the cluster administrator must deploy several components that serve as a bridge between OpenShift Dedicated and the storage driver.
The following diagram provides a high-level overview about the components running in pods in the OpenShift Dedicated cluster.
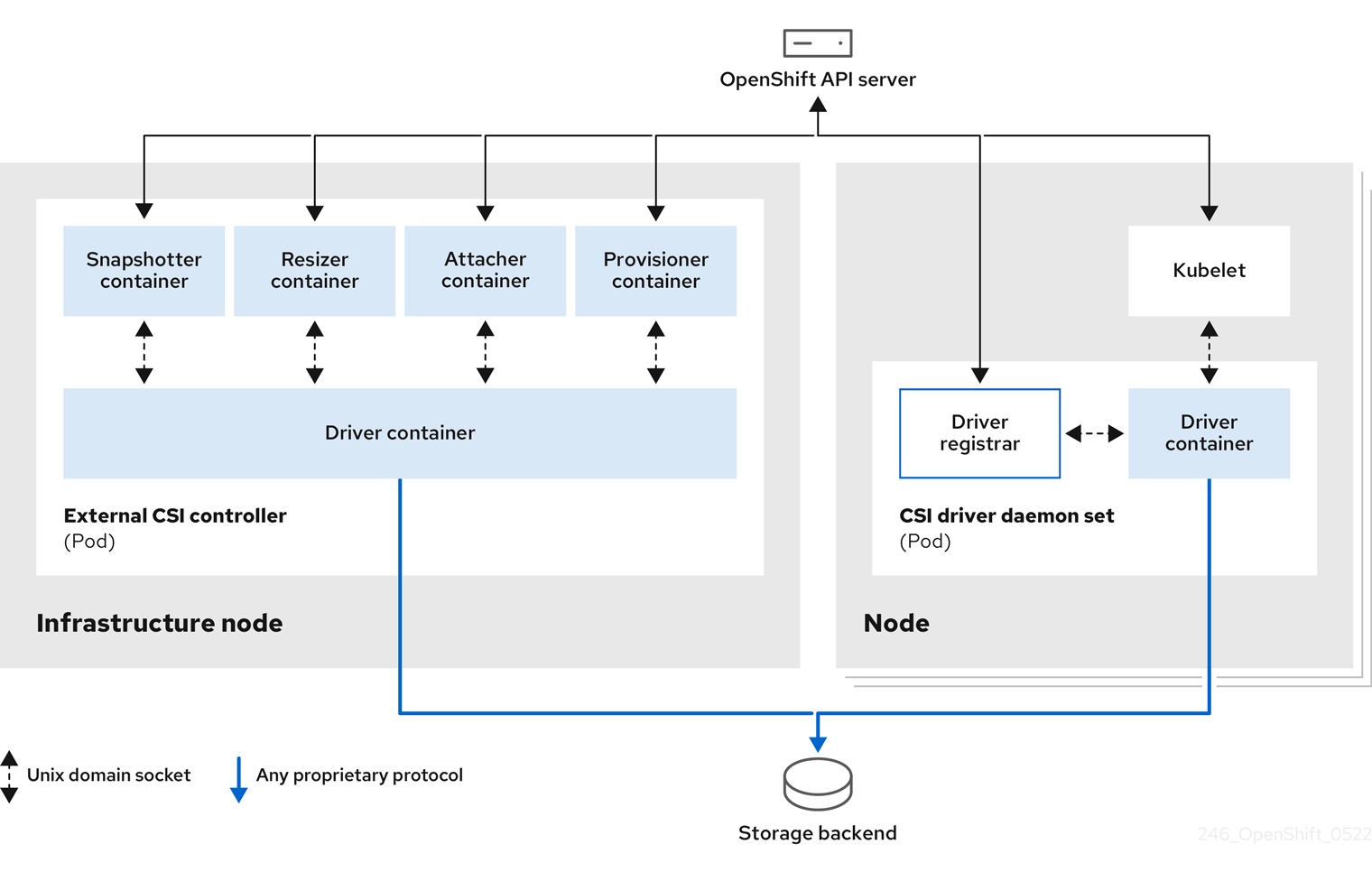
It is possible to run multiple CSI drivers for different storage back ends. Each driver needs its own external controllers deployment and daemon set with the driver and CSI registrar.
5.1.1.1. External CSI controllers
External CSI controllers is a deployment that deploys one or more pods with five containers:
-
The snapshotter container watches
VolumeSnapshotandVolumeSnapshotContentobjects and is responsible for the creation and deletion ofVolumeSnapshotContentobject. -
The resizer container is a sidecar container that watches for
PersistentVolumeClaimupdates and triggersControllerExpandVolumeoperations against a CSI endpoint if you request more storage onPersistentVolumeClaimobject. -
An external CSI attacher container translates
attachanddetachcalls from OpenShift Dedicated to respectiveControllerPublishandControllerUnpublishcalls to the CSI driver. -
An external CSI provisioner container that translates
provisionanddeletecalls from OpenShift Dedicated to respectiveCreateVolumeandDeleteVolumecalls to the CSI driver. - A CSI driver container.
The CSI attacher and CSI provisioner containers communicate with the CSI driver container using UNIX Domain Sockets, ensuring that no CSI communication leaves the pod. The CSI driver is not accessible from outside of the pod.
The attach, detach, provision, and delete operations typically require the CSI driver to use credentials to the storage backend. Run the CSI controller pods on infrastructure nodes so the credentials are never leaked to user processes, even in the event of a catastrophic security breach on a compute node.
The external attacher must also run for CSI drivers that do not support third-party attach or detach operations. The external attacher will not issue any ControllerPublish or ControllerUnpublish operations to the CSI driver. However, it still must run to implement the necessary OpenShift Dedicated attachment API.
5.1.1.2. CSI driver daemon set
The CSI driver daemon set runs a pod on every node that allows OpenShift Dedicated to mount storage provided by the CSI driver to the node and use it in user workloads (pods) as persistent volumes (PVs). The pod with the CSI driver installed contains the following containers:
-
A CSI driver registrar, which registers the CSI driver into the
openshift-nodeservice running on the node. Theopenshift-nodeprocess running on the node then directly connects with the CSI driver using the UNIX Domain Socket available on the node. - A CSI driver.
The CSI driver deployed on the node should have as few credentials to the storage back end as possible. OpenShift Dedicated will only use the node plugin set of CSI calls such as NodePublish/NodeUnpublish and NodeStage/NodeUnstage, if these calls are implemented.
5.1.2. CSI drivers supported by OpenShift Dedicated
OpenShift Dedicated installs certain CSI drivers by default, giving users storage options that are not possible with in-tree volume plugins.
To create CSI-provisioned persistent volumes that mount to these supported storage assets, OpenShift Dedicated installs the necessary CSI driver Operator, the CSI driver, and the required storage class by default. For more details about the default namespace of the Operator and driver, see the documentation for the specific CSI Driver Operator.
The AWS EFS and GCP Filestore CSI drivers are not installed by default, and must be installed manually. For instructions on installing the AWS EFS CSI driver, see Setting up AWS Elastic File Service CSI Driver Operator. For instructions on installing the GCP Filestore CSI driver, see Google Cloud Filestore CSI Driver Operator.
The following table describes the CSI drivers that are supported by OpenShift Dedicated, and which CSI features they support, such as volume snapshots and resize.
If your CSI driver is not listed in the following table, you must follow the installation instructions provided by your CSI storage vendor to use their supported CSI features.
For a list of third-party-certified CSI drivers, see the Red Hat ecosystem portal under Additional resources.
| CSI driver | CSI volume snapshots | CSI volume group snapshots [1] | CSI cloning | CSI resize | Inline ephemeral volumes | User namespaces |
|---|---|---|---|---|---|---|
| AWS EBS |
✅ |
|
|
✅ |
|
✅ |
| AWS EFS |
|
|
|
|
|
|
| Google Compute Platform (GCP) persistent disk (PD) |
✅ |
|
✅[2] |
✅ |
|
✅ |
| GCP Filestore |
✅ |
|
|
✅ |
|
|
| LVM Storage |
✅ |
|
✅ |
✅ |
|
✅ |
5.1.3. Dynamic provisioning
Dynamic provisioning of persistent storage depends on the capabilities of the CSI driver and underlying storage back end. The provider of the CSI driver should document how to create a storage class in OpenShift Dedicated and the parameters available for configuration.
The created storage class can be configured to enable dynamic provisioning.
Procedure
Create a default storage class that ensures all PVCs that do not require any special storage class are provisioned by the installed CSI driver.
# oc create -f - << EOF apiVersion: storage.k8s.io/v1 kind: StorageClass metadata: name: <storage-class>1 annotations: storageclass.kubernetes.io/is-default-class: "true" provisioner: <provisioner-name>2 parameters: csi.storage.k8s.io/fstype: xfs3 EOF
5.1.4. Example using the CSI driver
The following example installs a default MySQL template without any changes to the template.
Prerequisites
- The CSI driver has been deployed.
- A storage class has been created for dynamic provisioning.
Procedure
Create the MySQL template:
# oc new-app mysql-persistentExample output
--> Deploying template "openshift/mysql-persistent" to project default ...# oc get pvcExample output
NAME STATUS VOLUME CAPACITY mysql Bound kubernetes-dynamic-pv-3271ffcb4e1811e8 1Gi ACCESS MODES STORAGECLASS AGE RWO gp3-csi 3s
5.2. Managing the default storage class
5.2.1. Overview
Managing the default storage class allows you to accomplish several different objectives:
- Enforcing static provisioning by disabling dynamic provisioning.
- When you have other preferred storage classes, preventing the storage operator from re-creating the initial default storage class.
- Renaming, or otherwise changing, the default storage class
To accomplish these objectives, you change the setting for the spec.storageClassState field in the ClusterCSIDriver object. The possible settings for this field are:
- Managed: (Default) The Container Storage Interface (CSI) operator is actively managing its default storage class, so that most manual changes made by a cluster administrator to the default storage class are removed, and the default storage class is continuously re-created if you attempt to manually delete it.
- Unmanaged: You can modify the default storage class. The CSI operator is not actively managing storage classes, so that it is not reconciling the default storage class it creates automatically.
- Removed: The CSI operators deletes the default storage class.
5.2.2. Managing the default storage class using the web console
Prerequisites
- Access to the OpenShift Dedicated web console.
- Access to the cluster with cluster-admin privileges.
Procedure
To manage the default storage class using the web console:
- Log in to the web console.
- Click Administration > CustomResourceDefinitions.
-
On the CustomResourceDefinitions page, type
clustercsidriverto find theClusterCSIDriverobject. - Click ClusterCSIDriver, and then click the Instances tab.
- Click the name of the desired instance, and then click the YAML tab.
Add the
spec.storageClassStatefield with a value ofManaged,Unmanaged, orRemoved.Example
... spec: driverConfig: driverType: '' logLevel: Normal managementState: Managed observedConfig: null operatorLogLevel: Normal storageClassState: Unmanaged1 ...- 1
spec.storageClassStatefield set to "Unmanaged"
- Click Save.
5.2.3. Managing the default storage class using the CLI
Prerequisites
- Access to the cluster with cluster-admin privileges.
Procedure
To manage the storage class using the CLI, run the following command:
$ oc patch clustercsidriver $DRIVERNAME --type=merge -p "{\"spec\":{\"storageClassState\":\"${STATE}\"}}" - 1
- Where
${STATE}is "Removed" or "Managed" or "Unmanaged".Where
$DRIVERNAMEis the provisioner name. You can find the provisioner name by running the commandoc get sc.
5.2.4. Absent or multiple default storage classes
5.2.4.1. Multiple default storage classes
Multiple default storage classes can occur if you mark a non-default storage class as default and do not unset the existing default storage class, or you create a default storage class when a default storage class is already present. With multiple default storage classes present, any persistent volume claim (PVC) requesting the default storage class (pvc.spec.storageClassName=nil) gets the most recently created default storage class, regardless of the default status of that storage class, and the administrator receives an alert in the alerts dashboard that there are multiple default storage classes, MultipleDefaultStorageClasses.
5.2.4.2. Absent default storage class
There are two possible scenarios where PVCs can attempt to use a non-existent default storage class:
- An administrator removes the default storage class or marks it as non-default, and then a user creates a PVC requesting the default storage class.
- During installation, the installer creates a PVC requesting the default storage class, which has not yet been created.
In the preceding scenarios, PVCs remain in the pending state indefinitely. To resolve this situation, create a default storage class or declare one of the existing storage classes as the default. As soon as the default storage class is created or declared, the PVCs get the new default storage class. If possible, the PVCs eventually bind to statically or dynamically provisioned PVs as usual, and move out of the pending state.
5.2.5. Changing the default storage class
Learn how to change the cluster’s default storage class, for example, reassigning the default status from gp3 to standard.
Prerequisites
- Access to the cluster with cluster-admin privileges.
Procedure
List the storage classes:
$ oc get storageclassExample output
NAME TYPE gp3 (default) ebs.csi.aws.com standard ebs.csi.aws.comThe
(default)indicates the default storage class.Make the required storage class the default.
For the required storage class, set the
storageclass.kubernetes.io/is-default-classannotation totrueby running the following command:$ oc patch storageclass standard -p '{"metadata": {"annotations": {"storageclass.kubernetes.io/is-default-class": "true"}}}'NoteYou can have many default storage classes for a short time. However, you must ensure that only one default storage class exists eventually.
With many default storage classes present, any persistent volume claim (PVC) requesting the default storage class (
pvc.spec.storageClassName=nil) gets the most recently created default storage class, regardless of the default status of that storage class. The administrator receives an alert in the alerts dashboard that there are many default storage classes,MultipleDefaultStorageClasses.Remove the default storage class setting from the old default storage class.
For the old default storage class, change the value of the
storageclass.kubernetes.io/is-default-classannotation tofalseby running the following command:$ oc patch storageclass gp3 -p '{"metadata": {"annotations": {"storageclass.kubernetes.io/is-default-class": "false"}}}'Verify the changes:
$ oc get storageclassExample output
NAME TYPE gp3 ebs.csi.aws.com standard (default) ebs.csi.aws.com
5.3. AWS Elastic Block Store CSI Driver Operator
5.3.1. Overview
OpenShift Dedicated is capable of provisioning persistent volumes (PVs) using the AWS EBS CSI driver.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a Container Storage Interface (CSI) Operator and driver.
To create CSI-provisioned PVs that mount to AWS EBS storage assets, OpenShift Dedicated installs the AWS EBS CSI Driver Operator (a Red Hat operator) and the AWS EBS CSI driver by default in the openshift-cluster-csi-drivers namespace.
- The AWS EBS CSI Driver Operator provides a StorageClass by default that you can use to create PVCs. You can disable this default storage class if desired (see Managing the default storage class). You also have the option to create the AWS EBS StorageClass as described in Persistent storage using Amazon Elastic Block Store.
- The AWS EBS CSI driver enables you to create and mount AWS EBS PVs.
5.3.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Dedicated users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
OpenShift Dedicated defaults to using the CSI plugin to provision Amazon Elastic Block Store (Amazon EBS) storage.
For information about dynamically provisioning AWS EBS persistent volumes in OpenShift Dedicated, see Persistent storage using Amazon Elastic Block Store.
5.3.3. Support for European Sovereign Cloud (EUSC) region
European Sovereign Cloud (EUSC) region acts as a "digital fortress" built within a specific country’s borders. Sovereign Clouds are specifically designed to meet strict legal, jurisdictional, and security requirements of a particular nation or entity.
In the context of storage, EUSC ensures that all data, including primary storage, backups, and the resulting metadata, resides physically within the specific nation’s borders and remains exclusively under its legal jurisdiction.
For OpenShift Dedicated 4.22, and later, only AWS Elastic Block Storage supports EUSC. AWS Elastic File Storage (EFS) is not supported.
EUSC is a Technology Preview feature only. Technology Preview features are not supported with Red Hat production service level agreements (SLAs) and might not be functionally complete. Red Hat does not recommend using them in production. These features provide early access to upcoming product features, enabling customers to test functionality and provide feedback during the development process.
For more information about the support scope of Red Hat Technology Preview features, see Technology Preview Features Support Scope.
For information about installing an OpenShift Dedicated cluster into the AWS EUSC, see Section AWS EUSC region under Installing.
5.4. AWS Elastic File Service CSI Driver Operator
This procedure is specific to the AWS EFS CSI Driver Operator (a Red Hat Operator), which is only applicable for OpenShift Dedicated 4.10 and later versions.
5.4.1. Overview
OpenShift Dedicated is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for AWS Elastic File Service (EFS).
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a CSI Operator and driver.
After installing the AWS EFS CSI Driver Operator, OpenShift Dedicated installs the AWS EFS CSI Operator and the AWS EFS CSI driver by default in the openshift-cluster-csi-drivers namespace. This allows the AWS EFS CSI Driver Operator to create CSI-provisioned PVs that mount to AWS EFS assets.
-
The AWS EFS CSI Driver Operator, after being installed, does not create a storage class by default to use to create persistent volume claims (PVCs). However, you can manually create the AWS EFS
StorageClass. The AWS EFS CSI Driver Operator supports dynamic volume provisioning by allowing storage volumes to be created on-demand. This eliminates the need for cluster administrators to pre-provision storage. - The AWS EFS CSI driver enables you to create and mount AWS EFS PVs.
5.4.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Dedicated users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
5.4.3. Setting up the AWS EFS CSI Driver Operator
- If you are using AWS EFS with AWS Secure Token Service (STS), obtain a role Amazon Resource Name (ARN) for STS. This is required for installing the AWS EFS CSI Driver Operator.
- Install the AWS EFS CSI Driver Operator.
- Install the AWS EFS CSI Driver.
5.4.3.1. Obtaining a role Amazon Resource Name for Security Token Service
This procedure explains how to obtain a role Amazon Resource Name (ARN) to configure the AWS EFS CSI Driver Operator with OpenShift Dedicated on AWS Security Token Service (STS).
Perform this procedure before you install the AWS EFS CSI Driver Operator (see Installing the AWS EFS CSI Driver Operator procedure).
Prerequisites
- Access to the cluster as a user with the cluster-admin role.
- AWS account credentials
Procedure
Create an IAM policy JSON file with the following content:
{ "Version": "2012-10-17", "Statement": [ { "Effect": "Allow", "Action": [ "elasticfilesystem:DescribeAccessPoints", "elasticfilesystem:DescribeFileSystems", "elasticfilesystem:DescribeMountTargets", "ec2:DescribeAvailabilityZones", "elasticfilesystem:TagResource" ], "Resource": "*" }, { "Effect": "Allow", "Action": [ "elasticfilesystem:CreateAccessPoint" ], "Resource": "*", "Condition": { "StringLike": { "aws:RequestTag/efs.csi.aws.com/cluster": "true" } } }, { "Effect": "Allow", "Action": "elasticfilesystem:DeleteAccessPoint", "Resource": "*", "Condition": { "StringEquals": { "aws:ResourceTag/efs.csi.aws.com/cluster": "true" } } } ] }Create an IAM trust JSON file with the following content:
{ "Version": "2012-10-17", "Statement": [ { "Effect": "Allow", "Principal": { "Federated": "arn:aws:iam::<your_aws_account_ID>:oidc-provider/<openshift_oidc_provider>" }, "Action": "sts:AssumeRoleWithWebIdentity", "Condition": { "StringEquals": { "<openshift_oidc_provider>:sub": [ "system:serviceaccount:openshift-cluster-csi-drivers:aws-efs-csi-driver-operator", "system:serviceaccount:openshift-cluster-csi-drivers:aws-efs-csi-driver-controller-sa" ] } } } ] }where:
Statement.Principal.FederatedSpecifies your AWS account ID and the OpenShift OIDC provider endpoint.
Obtain your AWS account ID by running the following command:
$ aws sts get-caller-identity --query Account --output textObtain the OpenShift OIDC endpoint by running the following command:
$ openshift_oidc_provider=`oc get authentication.config.openshift.io cluster \ -o json | jq -r .spec.serviceAccountIssuer | sed -e "s/^https:\/\///"`; \ echo $openshift_oidc_providerStatement.Condition.StringEquals[0]- Specify the OpenShift OIDC endpoint again.
Create the IAM role:
ROLE_ARN=$(aws iam create-role \ --role-name "<your_cluster_name>-aws-efs-csi-operator" \ --assume-role-policy-document file://<your_trust_file_name>.json \ --query "Role.Arn" --output text); echo $ROLE_ARNCopy the role ARN. You will need it when you install the AWS EFS CSI Driver Operator.
Create the IAM policy:
POLICY_ARN=$(aws iam create-policy \ --policy-name "<your_cluster_name>-aws-efs-csi" \ --policy-document file://<your_policy_file_name>.json \ --query 'Policy.Arn' --output text); echo $POLICY_ARNAttach the IAM policy to the IAM role:
$ aws iam attach-role-policy \ --role-name "<your_cluster_name>-aws-efs-csi-operator" \ --policy-arn $POLICY_ARN
Next steps
5.4.3.2. Installing the AWS EFS CSI Driver Operator
The AWS EFS CSI Driver Operator (a Red Hat Operator) is not installed in OpenShift Dedicated by default. Use the following procedure to install and configure the AWS EFS CSI Driver Operator in your cluster.
Prerequisites
- Access to the OpenShift Dedicated web console.
Procedure
To install the AWS EFS CSI Driver Operator from the web console:
- Log in to the web console.
Install the AWS EFS CSI Operator:
-
Click Ecosystem
Software Catalog. - Locate the AWS EFS CSI Operator by typing AWS EFS CSI in the filter box.
- Click the AWS EFS CSI Driver Operator button.
ImportantBe sure to select the AWS EFS CSI Driver Operator and not the AWS EFS Operator. The AWS EFS Operator is a community Operator and is not supported by Red Hat.
- On the AWS EFS CSI Driver Operator page, click Install.
On the Install Operator page, ensure that:
- If you are using AWS EFS with AWS Secure Token Service (STS), in the role ARN field, enter the ARN role copied from the last step of the Obtaining a role Amazon Resource Name for Security Token Service procedure.
- All namespaces on the cluster (default) is selected.
- Installed Namespace is set to openshift-cluster-csi-drivers.
Click Install.
After the installation finishes, the AWS EFS CSI Operator is listed in the Installed Operators section of the web console.
-
Click Ecosystem
Next steps
5.4.3.3. Installing the AWS EFS CSI Driver
After installing the AWS EFS CSI Driver Operator (a Red Hat operator), you install the AWS EFS CSI driver.
Prerequisites
- Access to the OpenShift Dedicated web console.
Procedure
-
Click Administration
CustomResourceDefinitions ClusterCSIDriver. - On the Instances tab, click Create ClusterCSIDriver.
Use the following YAML file:
apiVersion: operator.openshift.io/v1 kind: ClusterCSIDriver metadata: name: efs.csi.aws.com spec: managementState: Managed- Click Create.
Wait for the following Conditions to change to a "True" status:
- AWSEFSDriverNodeServiceControllerAvailable
- AWSEFSDriverControllerServiceControllerAvailable
5.4.4. Creating the AWS EFS storage class
Storage classes are used to differentiate and delineate storage levels and usages. By defining a storage class, users can obtain dynamically provisioned persistent volumes.
The AWS EFS CSI Driver Operator (a Red Hat operator), after being installed, does not create a storage class by default. However, you can manually create the AWS EFS storage class.
5.4.4.1. Creating the AWS EFS storage class using the console
Procedure
-
In the OpenShift Dedicated web console, click Storage
StorageClasses. - On the StorageClasses page, click Create StorageClass.
On the StorageClass page, perform the following steps:
- Enter a name to reference the storage class.
- Optional: Enter the description.
- Select the reclaim policy.
-
Select
efs.csi.aws.comfrom the Provisioner drop-down list. - Optional: Set the configuration parameters for the selected provisioner.
- Click Create.
5.4.4.2. Creating the AWS EFS storage class using the CLI
Procedure
Create a
StorageClassobject:kind: StorageClass apiVersion: storage.k8s.io/v1 metadata: name: efs-sc provisioner: efs.csi.aws.com parameters: provisioningMode: efs-ap1 fileSystemId: fs-a53249112 directoryPerms: "700"3 gidRangeStart: "1000"4 gidRangeEnd: "2000"5 basePath: "/dynamic_provisioning"6 - 1
provisioningModemust beefs-apto enable dynamic provisioning.- 2
fileSystemIdmust be the ID of the EFS volume created manually.- 3
directoryPermsis the default permission of the root directory of the volume. In this example, the volume is accessible only by the owner.- 4 5
gidRangeStartandgidRangeEndset the range of POSIX Group IDs (GIDs) that are used to set the GID of the AWS access point. If not specified, the default range is 50000-7000000. Each provisioned volume, and thus AWS access point, is assigned a unique GID from this range.- 6
basePathis the directory on the EFS volume that is used to create dynamically provisioned volumes. In this case, a PV is provisioned as “/dynamic_provisioning/<random uuid>” on the EFS volume. Only the subdirectory is mounted to pods that use the PV.
NoteA cluster admin can create several
StorageClassobjects, each using a different EFS volume.
5.4.5. AWS EFS CSI cross account support
Cross account support allows you to have an OpenShift Dedicated cluster in one AWS account and mount your file system in another AWS account by using the AWS Elastic File System (EFS) Container Storage Interface (CSI) driver.
Prerequisites
- Access to an OpenShift Dedicated cluster with administrator rights
- Two valid AWS accounts
- The EFS CSI Operator has been installed. For information about installing the EFS CSI Operator, see the Installing the AWS EFS CSI Driver Operator section.
- Both the OpenShift Dedicated cluster and EFS file system must be located in the same AWS region.
- Ensure that the two virtual private clouds (VPCs) used in the following procedure use different network Classless Inter-Domain Routing (CIDR) ranges.
-
Access to OpenShift Dedicated CLI (
oc). - Access to AWS CLI.
-
Access to
jqcommand-line JSON processor.
Procedure
The following procedure explains how to set up:
- OpenShift Dedicated AWS Account A: Contains a Red Hat OpenShift Dedicated cluster v4.16, or later, deployed within a VPC
- AWS Account B: Contains a VPC (including subnets, route tables, and network connectivity). The EFS filesystem will be created in this VPC.
To use AWS EFS across accounts:
Set up the environment:
Configure environment variables by running the following commands:
export CLUSTER_NAME="<CLUSTER_NAME>"1 export AWS_REGION="<AWS_REGION>"2 export AWS_ACCOUNT_A_ID="<ACCOUNT_A_ID>"3 export AWS_ACCOUNT_B_ID="<ACCOUNT_B_ID>"4 export AWS_ACCOUNT_A_VPC_CIDR="<VPC_A_CIDR>"5 export AWS_ACCOUNT_B_VPC_CIDR="<VPC_B_CIDR>"6 export AWS_ACCOUNT_A_VPC_ID="<VPC_A_ID>"7 export AWS_ACCOUNT_B_VPC_ID="<VPC_B_ID>"8 export SCRATCH_DIR="<WORKING_DIRECTORY>"9 export CSI_DRIVER_NAMESPACE="openshift-cluster-csi-drivers"10 export AWS_PAGER=""11 - 1
- Cluster name of choice.
- 2
- AWS region of choice.
- 3
- AWS Account A ID.
- 4
- AWS Account B ID.
- 5
- CIDR range of VPC in Account A.
- 6
- CIDR range of VPC in Account B.
- 7
- VPC ID in Account A (cluster)
- 8
- VPC ID in Account B (EFS cross account)
- 9
- Any writeable directory of choice to use to store temporary files.
- 10
- If your driver is installed in a non-default namespace, change this value.
- 11
- Makes AWS CLI output everything directly to stdout.
Create the working directory by running the following command:
mkdir -p $SCRATCH_DIRVerify cluster connectivity by running the following command in the OpenShift Dedicated CLI:
$ oc whoamiDetermine the OpenShift Dedicated cluster type and set node selector:
The EFS cross account feature requires assigning AWS IAM policies to nodes running EFS CSI controller pods. However, this is not consistent for every OpenShift Dedicated type.
If your cluster is deployed as a Hosted Control Plane (HyperShift), set the
NODE_SELECTORenvironment variable to hold the worker node label by running the following command:export NODE_SELECTOR=node-role.kubernetes.io/workerFor all other OpenShift Dedicated types, set the
NODE_SELECTORenvironment variable to hold the master node label by running the following command:export NODE_SELECTOR=node-role.kubernetes.io/master
Configure AWS CLI profiles as environment variables for account switching by running the following commands:
export AWS_ACCOUNT_A="<ACCOUNT_A_NAME>" export AWS_ACCOUNT_B="<ACCOUNT_B_NAME>"Ensure that your AWS CLI is configured with JSON output format as the default for both accounts by running the following commands:
export AWS_DEFAULT_PROFILE=${AWS_ACCOUNT_A} aws configure get output export AWS_DEFAULT_PROFILE=${AWS_ACCOUNT_B} aws configure get outputIf the preceding commands return:
- No value: The default output format is already set to JSON and no changes are required.
- Any value: Reconfigure your AWS CLI to use JSON format. For information about changing output formats, see Setting the output format in the AWS CLI in the AWS documentation.
Unset
AWS_PROFILEin your shell to prevent conflicts withAWS_DEFAULT_PROFILEby running the following command:unset AWS_PROFILE
Configure the AWS Account B IAM roles and policies:
Switch to your Account B profile by running the following command:
export AWS_DEFAULT_PROFILE=${AWS_ACCOUNT_B}Define the IAM role name for the EFS CSI Driver Operator by running the following command:
export ACCOUNT_B_ROLE_NAME=${CLUSTER_NAME}-cross-account-aws-efs-csi-operatorCreate the IAM trust policy file by running the following command:
cat <<EOF > $SCRATCH_DIR/AssumeRolePolicyInAccountB.json { "Version": "2012-10-17", "Statement": [ { "Effect": "Allow", "Principal": { "AWS": "arn:aws:iam::${AWS_ACCOUNT_A_ID}:root" }, "Action": "sts:AssumeRole", "Condition": {} } ] } EOFCreate the IAM role for the EFS CSI Driver Operator by running the following command:
ACCOUNT_B_ROLE_ARN=$(aws iam create-role \ --role-name "${ACCOUNT_B_ROLE_NAME}" \ --assume-role-policy-document file://$SCRATCH_DIR/AssumeRolePolicyInAccountB.json \ --query "Role.Arn" --output text) \ && echo $ACCOUNT_B_ROLE_ARNCreate the IAM policy file by running the following command:
cat << EOF > $SCRATCH_DIR/EfsPolicyInAccountB.json { "Version": "2012-10-17", "Statement": [ { "Sid": "VisualEditor0", "Effect": "Allow", "Action": [ "ec2:DescribeNetworkInterfaces", "ec2:DescribeSubnets" ], "Resource": "*" }, { "Sid": "VisualEditor1", "Effect": "Allow", "Action": [ "elasticfilesystem:DescribeMountTargets", "elasticfilesystem:DeleteAccessPoint", "elasticfilesystem:ClientMount", "elasticfilesystem:DescribeAccessPoints", "elasticfilesystem:ClientWrite", "elasticfilesystem:ClientRootAccess", "elasticfilesystem:DescribeFileSystems", "elasticfilesystem:CreateAccessPoint", "elasticfilesystem:TagResource" ], "Resource": "*" } ] } EOFCreate the IAM policy by running the following command:
ACCOUNT_B_POLICY_ARN=$(aws iam create-policy --policy-name "${CLUSTER_NAME}-efs-csi-policy" \ --policy-document file://$SCRATCH_DIR/EfsPolicyInAccountB.json \ --query 'Policy.Arn' --output text) \ && echo ${ACCOUNT_B_POLICY_ARN}Attach the policy to the role by running the following command:
aws iam attach-role-policy \ --role-name "${ACCOUNT_B_ROLE_NAME}" \ --policy-arn "${ACCOUNT_B_POLICY_ARN}"
Configure the AWS Account A IAM roles and policies:
Switch to your Account A profile by running the following command:
export AWS_DEFAULT_PROFILE=${AWS_ACCOUNT_A}Create the IAM policy document by running the following command:
cat << EOF > $SCRATCH_DIR/AssumeRoleInlinePolicyPolicyInAccountA.json { "Version": "2012-10-17", "Statement": [ { "Effect": "Allow", "Action": "sts:AssumeRole", "Resource": "${ACCOUNT_B_ROLE_ARN}" } ] } EOFIn AWS Account A, attach the AWS-managed policy "AmazonElasticFileSystemClientFullAccess" to the OpenShift Dedicated cluster master role by running the following command:
EFS_CLIENT_FULL_ACCESS_BUILTIN_POLICY_ARN=arn:aws:iam::aws:policy/AmazonElasticFileSystemClientFullAccess declare -A ROLE_SEEN for NODE in $(oc get nodes --selector="${NODE_SELECTOR}" -o jsonpath='{.items[*].metadata.name}'); do INSTANCE_PROFILE=$(aws ec2 describe-instances \ --filters "Name=private-dns-name,Values=${NODE}" \ --query 'Reservations[].Instances[].IamInstanceProfile.Arn' \ --output text | awk -F'/' '{print $NF}' | xargs) MASTER_ROLE_ARN=$(aws iam get-instance-profile \ --instance-profile-name "${INSTANCE_PROFILE}" \ --query 'InstanceProfile.Roles[0].Arn' \ --output text | xargs) MASTER_ROLE_NAME=$(echo "${MASTER_ROLE_ARN}" | awk -F'/' '{print $NF}' | xargs) echo "Checking role: '${MASTER_ROLE_NAME}'" if [[ -n "${ROLE_SEEN[$MASTER_ROLE_NAME]:-}" ]]; then echo "Already processed role: '${MASTER_ROLE_NAME}', skipping." continue fi ROLE_SEEN["$MASTER_ROLE_NAME"]=1 echo "Assigning policy ${EFS_CLIENT_FULL_ACCESS_BUILTIN_POLICY_ARN} to role ${MASTER_ROLE_NAME}" aws iam attach-role-policy --role-name "${MASTER_ROLE_NAME}" --policy-arn "${EEFS_CLIENT_FULL_ACCESS_BUILTIN_POLICY_ARN}" done
Attach the policy to the IAM entity to allow role assumption:
This step depends on your cluster configuration. In both of the following scenarios, the EFS CSI Driver Operator uses an entity to authenticate to AWS, and this entity must be granted permission to assume roles in Account B.
If your cluster:
- Does not have STS enabled: The EFS CSI Driver Operator uses an IAM User entity for AWS authentication. Continue with the step "Attach policy to IAM User to allow role assumption".
- Has STS enabled: The EFS CSI Driver Operator uses an IAM role entity for AWS authentication. Continue with the step "Attach policy to IAM Role to allow role assumption".
Attach policy to IAM User to allow role assumption
Identify the IAM User used by the EFS CSI Driver Operator by running the following command:
EFS_CSI_DRIVER_OPERATOR_USER=$(oc -n openshift-cloud-credential-operator get credentialsrequest/openshift-aws-efs-csi-driver -o json | jq -r '.status.providerStatus.user')Attach the policy to the IAM user by running the following command:
aws iam put-user-policy \ --user-name "${EFS_CSI_DRIVER_OPERATOR_USER}" \ --policy-name efs-cross-account-inline-policy \ --policy-document file://$SCRATCH_DIR/AssumeRoleInlinePolicyPolicyInAccountA.json
Attach the policy to the IAM role to allow role assumption:
Identify the IAM role name currently used by the EFS CSI Driver Operator by running the following command:
EFS_CSI_DRIVER_OPERATOR_ROLE=$(oc -n ${CSI_DRIVER_NAMESPACE} get secret/aws-efs-cloud-credentials -o jsonpath='{.data.credentials}' | base64 -d | grep role_arn | cut -d'/' -f2) && echo ${EFS_CSI_DRIVER_OPERATOR_ROLE}Attach the policy to the IAM role used by the EFS CSI Driver Operator by running the following command:
aws iam put-role-policy \ --role-name "${EFS_CSI_DRIVER_OPERATOR_ROLE}" \ --policy-name efs-cross-account-inline-policy \ --policy-document file://$SCRATCH_DIR/AssumeRoleInlinePolicyPolicyInAccountA.json
Configure VPC peering:
Initiate a peering request from Account A to Account B by running the following command:
export AWS_DEFAULT_PROFILE=${AWS_ACCOUNT_A} PEER_REQUEST_ID=$(aws ec2 create-vpc-peering-connection --vpc-id "${AWS_ACCOUNT_A_VPC_ID}" --peer-vpc-id "${AWS_ACCOUNT_B_VPC_ID}" --peer-owner-id "${AWS_ACCOUNT_B_ID}" --query VpcPeeringConnection.VpcPeeringConnectionId --output text)Accept the peering request from Account B by running the following command:
export AWS_DEFAULT_PROFILE=${AWS_ACCOUNT_B} aws ec2 accept-vpc-peering-connection --vpc-peering-connection-id "${PEER_REQUEST_ID}"Retrieve the route table IDs for Account A and add routes to the Account B VPC by running the following command:
export AWS_DEFAULT_PROFILE=${AWS_ACCOUNT_A} for NODE in $(oc get nodes --selector=node-role.kubernetes.io/worker | tail -n +2 | awk '{print $1}') do SUBNET=$(aws ec2 describe-instances --filters "Name=private-dns-name,Values=$NODE" --query 'Reservations[*].Instances[*].NetworkInterfaces[*].SubnetId' | jq -r '.[0][0][0]') echo SUBNET is ${SUBNET} ROUTE_TABLE_ID=$(aws ec2 describe-route-tables --filters "Name=association.subnet-id,Values=${SUBNET}" --query 'RouteTables[*].RouteTableId' | jq -r '.[0]') echo Route table ID is $ROUTE_TABLE_ID aws ec2 create-route --route-table-id ${ROUTE_TABLE_ID} --destination-cidr-block ${AWS_ACCOUNT_B_VPC_CIDR} --vpc-peering-connection-id ${PEER_REQUEST_ID} doneRetrieve the route table IDs for Account B and add routes to the Account A VPC by running the following command:
export AWS_DEFAULT_PROFILE=${AWS_ACCOUNT_B} for ROUTE_TABLE_ID in $(aws ec2 describe-route-tables --filters "Name=vpc-id,Values=${AWS_ACCOUNT_B_VPC_ID}" --query "RouteTables[].RouteTableId" | jq -r '.[]') do echo Route table ID is $ROUTE_TABLE_ID aws ec2 create-route --route-table-id ${ROUTE_TABLE_ID} --destination-cidr-block ${AWS_ACCOUNT_A_VPC_CIDR} --vpc-peering-connection-id ${PEER_REQUEST_ID} done
Configure security groups in Account B to allow NFS traffic from Account A to EFS:
Switch to your Account B profile by running the following command:
export AWS_DEFAULT_PROFILE=${AWS_ACCOUNT_B}Configure the VPC security groups for EFS access by running the following command:
SECURITY_GROUP_ID=$(aws ec2 describe-security-groups --filters Name=vpc-id,Values="${AWS_ACCOUNT_B_VPC_ID}" | jq -r '.SecurityGroups[].GroupId') aws ec2 authorize-security-group-ingress \ --group-id "${SECURITY_GROUP_ID}" \ --protocol tcp \ --port 2049 \ --cidr "${AWS_ACCOUNT_A_VPC_CIDR}" | jq .
Create a region-wide EFS filesystem in Account B:
Switch to your Account B profile by running the following command:
export AWS_DEFAULT_PROFILE=${AWS_ACCOUNT_B}Create a region-wide EFS file system by running the following command:
CROSS_ACCOUNT_FS_ID=$(aws efs create-file-system --creation-token efs-token-1 \ --region ${AWS_REGION} \ --encrypted | jq -r '.FileSystemId') \ && echo $CROSS_ACCOUNT_FS_IDConfigure region-wide mount targets for EFS by running the following command:
for SUBNET in $(aws ec2 describe-subnets \ --filters "Name=vpc-id,Values=${AWS_ACCOUNT_B_VPC_ID}" \ --region ${AWS_REGION} \ | jq -r '.Subnets.[].SubnetId'); do \ MOUNT_TARGET=$(aws efs create-mount-target --file-system-id ${CROSS_ACCOUNT_FS_ID} \ --subnet-id ${SUBNET} \ --region ${AWS_REGION} \ | jq -r '.MountTargetId'); \ echo ${MOUNT_TARGET}; \ doneThis creates a mount point in each subnet of your VPC.
Configure the EFS Operator for cross-account access:
Define custom names for the secret and storage class that you will create in subsequent steps by running the following command:
export SECRET_NAME=my-efs-cross-account export STORAGE_CLASS_NAME=efs-sc-crossCreate a secret that references the role ARN in Account B by running the following command in the OpenShift Dedicated CLI:
oc create secret generic ${SECRET_NAME} -n ${CSI_DRIVER_NAMESPACE} --from-literal=awsRoleArn="${ACCOUNT_B_ROLE_ARN}"Grant the CSI driver controller access to the newly created secret by running the following commands in the OpenShift Dedicated CLI:
oc -n ${CSI_DRIVER_NAMESPACE} create role access-secrets --verb=get,list,watch --resource=secrets oc -n ${CSI_DRIVER_NAMESPACE} create rolebinding --role=access-secrets default-to-secrets --serviceaccount=${CSI_DRIVER_NAMESPACE}:aws-efs-csi-driver-controller-saCreate a new storage class that references the EFS ID from Account B and the secret created previously by running the following command in the OpenShift Dedicated CLI:
cat << EOF | oc apply -f - kind: StorageClass apiVersion: storage.k8s.io/v1 metadata: name: ${STORAGE_CLASS_NAME} provisioner: efs.csi.aws.com parameters: provisioningMode: efs-ap fileSystemId: ${CROSS_ACCOUNT_FS_ID} directoryPerms: "700" gidRangeStart: "1000" gidRangeEnd: "2000" basePath: "/dynamic_provisioning" csi.storage.k8s.io/provisioner-secret-name: ${SECRET_NAME} csi.storage.k8s.io/provisioner-secret-namespace: ${CSI_DRIVER_NAMESPACE} EOF
5.4.6. One Zone file systems
5.4.6.1. One Zone file systems overview
OpenShift Dedicated supports AWS Elastic File System (EFS) One Zone file system, which is an EFS storage option that stores data redundantly within a single Availability Zone (AZ). This contrasts with the default EFS storage option, which stores data redundantly across multiple AZs within a region.
Clusters upgraded from OpenShift Dedicated 4.19 are compatible with the regional EFS volumes.
Dynamic provisioning of One Zone volumes is supported only in single-zone clusters. All nodes in the cluster must be in the same AZ as the EFS volume that is used for the dynamic provisioning.
Manually provisioned One Zone volumes in regional clusters is supported, assuming that the persistent volumes (PVs) have correct spec.nodeAffinity that indicates the zone that the volume is in.
For Cloud Credential Operator (CCO) Mint mode or Passthrough, no extra configuration is required. However, for Security Token Service (STS), use the procedure in Section Setting up One Zone file systems with STS.
5.4.6.2. Setting up One Zone file systems with STS
The following procedure explains how to set up AWS One Zone file systems with Security Token Service (STS):
Prerequisites
- Access to the cluster as a user with the cluster-admin role.
- AWS account credentials
Procedure
To configure One Zone file systems with STS:
Create two
CredentialsRequestsin thecredrequestsdirectory following the procedure under Section Obtaining a role Amazon Resource Name for Security Token Service.:-
For the controller
CredentialsRequest, follow the procedure without any changes. For the driver node
CredentialsRequestuse the following example file:Example CredentialsRequest YAML file for driver node
apiVersion: cloudcredential.openshift.io/v1 kind: CredentialsRequest metadata: annotations: credentials.openshift.io/role-arns-vars: NODE_ROLEARN1 name: openshift-aws-efs-csi-driver-node namespace: openshift-cloud-credential-operator spec: providerSpec: apiVersion: cloudcredential.openshift.io/v1 kind: AWSProviderSpec statementEntries: - action: - elasticfilesystem:DescribeMountTargets - ec2:DescribeAvailabilityZones effect: Allow resource: '*' secretRef: name: node-aws-efs-cloud-credentials namespace: openshift-cluster-csi-drivers serviceAccountNames: - aws-efs-csi-driver-node-sa- 1
- Set
metadata.annotations.credentials.openshift.io/role-arns-varstoNODE_ROLEARN.
Example
ccoctloutput2025/08/26 14:05:24 Role arn:aws:iam::269733383066:role/my-arn-1-blll6-openshift-cluster-csi-drivers-aws-efs-cloud-cre created1 2025/08/26 14:05:24 Saved credentials configuration to: /home/my-arn/project/go/src/github.com/openshift/myinst/aws-sts-compact-1/manifests/openshift-cluster-csi-drivers-aws-efs-cloud-credentials-credentials.yaml 2025/08/26 14:05:24 Updated Role policy for Role my-arn-1-blll6-openshift-cluster-csi-drivers-aws-efs-cloud-cre 2025/08/26 14:05:24 Role arn:aws:iam::269733383066:role/my-arn-1-blll6-openshift-cluster-csi-drivers-node-aws-efs-clou created2 2025/08/26 14:05:24 Saved credentials configuration to: manifests/openshift-cluster-csi-drivers-node-aws-efs-cloud-credentials-credentials.yaml 2025/08/26 14:05:24 Updated Role policy for Role my-arn-1-blll6-openshift-cluster-csi-drivers-node-aws-efs-clou
-
For the controller
- Install the AWS EFS CSI driver using the controller ARN created earlier in this procedure.
Edit the operator’s subscription and add
NODE_ROLEARNwith the driver node’s ARN by running a command similar to the following:$ oc -n openshift-cluster-csi-drivers edit subscription aws-efs-csi-driver-operator ... config: env: - name: ROLEARN value: arn:aws:iam::269733383066:role/my-arn-1-blll6-openshift-cluster-csi-drivers-aws-efs-cloud-cre1 - name: NODE_ROLEARN value: arn:aws:iam::269733383066:role/my-arn-1-blll6-openshift-cluster-csi-drivers-node-aws-efs-clou2 ...
5.4.7. Dynamic provisioning for Amazon Elastic File Storage
The AWS EFS CSI driver supports a different form of dynamic provisioning than other CSI drivers. It provisions new PVs as subdirectories of a pre-existing EFS volume. The PVs are independent of each other. However, they all share the same EFS volume. When the volume is deleted, all PVs provisioned out of it are deleted too. The EFS CSI driver creates an AWS Access Point for each such subdirectory. Due to AWS AccessPoint limits, you can only dynamically provision 1000 PVs from a single StorageClass/EFS volume.
Note that PVC.spec.resources is not enforced by EFS.
In the example below, you request 5 GiB of space. However, the created PV is limitless and can store any amount of data (like petabytes). A broken application, or even a rogue application, can cause significant expenses when it stores too much data on the volume.
Using monitoring of EFS volume sizes in AWS is strongly recommended.
Prerequisites
- You have created Amazon Elastic File Storage (Amazon EFS) volumes.
- You have created the AWS EFS storage class.
Procedure
To enable dynamic provisioning:
Create a PVC (or StatefulSet or Template) as usual, referring to the
StorageClasscreated previously.apiVersion: v1 kind: PersistentVolumeClaim metadata: name: test spec: storageClassName: efs-sc accessModes: - ReadWriteMany resources: requests: storage: 5Gi
If you have problems setting up dynamic provisioning, see AWS EFS troubleshooting.
5.4.8. Creating static PVs with Amazon Elastic File Storage
It is possible to use an Amazon Elastic File Storage (Amazon EFS) volume as a single PV without any dynamic provisioning. The whole volume is mounted to pods.
Prerequisites
- You have created Amazon EFS volumes.
Procedure
Create the PV using the following YAML file:
apiVersion: v1 kind: PersistentVolume metadata: name: efs-pv spec: capacity:1 storage: 5Gi volumeMode: Filesystem accessModes: - ReadWriteMany - ReadWriteOnce persistentVolumeReclaimPolicy: Retain csi: driver: efs.csi.aws.com volumeHandle: fs-ae66151a2 volumeAttributes: encryptInTransit: "false"3 - 1
spec.capacitydoes not have any meaning and is ignored by the CSI driver. It is used only when binding to a PVC. Applications can store any amount of data to the volume.- 2
volumeHandlemust be the same ID as the EFS volume you created in AWS. If you are providing your own access point,volumeHandleshould be<EFS volume ID>::<access point ID>. For example:fs-6e633ada::fsap-081a1d293f0004630.- 3
- If desired, you can disable encryption in transit. Encryption is enabled by default.
If you have problems setting up static PVs, see AWS EFS troubleshooting.
5.4.9. Amazon Elastic File Storage security
The following information is important for Amazon Elastic File Storage (Amazon EFS) security.
When using access points, for example, by using dynamic provisioning as described earlier, Amazon automatically replaces GIDs on files with the GID of the access point. In addition, EFS considers the user ID, group ID, and secondary group IDs of the access point when evaluating file system permissions. EFS ignores the NFS client’s IDs. For more information about access points, see https://docs.aws.amazon.com/efs/latest/ug/efs-access-points.html.
As a consequence, EFS volumes silently ignore FSGroup; OpenShift Dedicated is not able to replace the GIDs of files on the volume with FSGroup. Any pod that can access a mounted EFS access point can access any file on it.
Unrelated to this, encryption in transit is enabled by default. For more information, see https://docs.aws.amazon.com/efs/latest/ug/encryption-in-transit.html.
5.4.10. AWS EFS storage CSI usage metrics
5.4.10.1. Usage metrics overview
Amazon Web Services (AWS) Elastic File Service (EFS) storage Container Storage Interface (CSI) usage metrics allow you to monitor how much space is used by either dynamically or statically provisioned EFS volumes.
This features is disabled by default, because turning on metrics can lead to performance degradation.
The AWS EFS usage metrics feature collects volume metrics in the AWS EFS CSI Driver by recursively walking through the files in the volume. Because this effort can degrade performance, administrators must explicitly enable this feature.
5.4.10.2. Enabling usage metrics using the web console
To enable Amazon Web Services (AWS) Elastic File Service (EFS) Storage Container Storage Interface (CSI) usage metrics using the web console:
- Click Administration > CustomResourceDefinitions.
-
On the CustomResourceDefinitions page next to the Name dropdown box, type
clustercsidriver. - Click CRD ClusterCSIDriver.
- Click the YAML tab.
Under
spec.aws.efsVolumeMetrics.state, set the value toRecursiveWalk.RecursiveWalkindicates that volume metrics collection in the AWS EFS CSI Driver is performed by recursively walking through the files in the volume.Example ClusterCSIDriver efs.csi.aws.com YAML file
spec: driverConfig: driverType: AWS aws: efsVolumeMetrics: state: RecursiveWalk recursiveWalk: refreshPeriodMinutes: 100 fsRateLimit: 10Optional: To define how the recursive walk operates, you can also set the following fields:
-
refreshPeriodMinutes: Specifies the refresh frequency for volume metrics in minutes. If this field is left blank, a reasonable default is chosen, which is subject to change over time. The current default is 240 minutes. The valid range is 1 to 43,200 minutes. -
fsRateLimit: Defines the rate limit for processing volume metrics in goroutines per file system. If this field is left blank, a reasonable default is chosen, which is subject to change over time. The current default is 5 goroutines. The valid range is 1 to 100 goroutines.
-
- Click Save.
To disable AWS EFS CSI usage metrics, use the preceding procedure, but for spec.aws.efsVolumeMetrics.state, change the value from RecursiveWalk to Disabled.
5.4.10.3. Enabling usage metrics using the CLI
To enable Amazon Web Services (AWS) Elastic File Service (EFS) storage Container Storage Interface (CSI) usage metrics using the CLI:
Edit ClusterCSIDriver by running the following command:
$ oc edit clustercsidriver efs.csi.aws.comUnder
spec.aws.efsVolumeMetrics.state, set the value toRecursiveWalk.RecursiveWalkindicates that volume metrics collection in the AWS EFS CSI Driver is performed by recursively walking through the files in the volume.Example ClusterCSIDriver efs.csi.aws.com YAML file
spec: driverConfig: driverType: AWS aws: efsVolumeMetrics: state: RecursiveWalk recursiveWalk: refreshPeriodMinutes: 100 fsRateLimit: 10Optional: To define how the recursive walk operates, you can also set the following fields:
-
refreshPeriodMinutes: Specifies the refresh frequency for volume metrics in minutes. If this field is left blank, a reasonable default is chosen, which is subject to change over time. The current default is 240 minutes. The valid range is 1 to 43,200 minutes. -
fsRateLimit: Defines the rate limit for processing volume metrics in goroutines per file system. If this field is left blank, a reasonable default is chosen, which is subject to change over time. The current default is 5 goroutines. The valid range is 1 to 100 goroutines.
-
-
Save the changes to the
efs.csi.aws.comobject.
To disable AWS EFS CSI usage metrics, use the preceding procedure, but for spec.aws.efsVolumeMetrics.state, change the value from RecursiveWalk to Disabled.
5.4.11. Amazon Elastic File Storage troubleshooting
The following information provides guidance on how to troubleshoot issues with Amazon Elastic File Storage (Amazon EFS):
-
The AWS EFS Operator and CSI driver run in namespace
openshift-cluster-csi-drivers. To initiate gathering of logs of the AWS EFS Operator and CSI driver, run the following command:
$ oc adm must-gather [must-gather ] OUT Using must-gather plugin-in image: quay.io/openshift-release-dev/ocp-v4.0-art-dev@sha256:125f183d13601537ff15b3239df95d47f0a604da2847b561151fedd699f5e3a5 [must-gather ] OUT namespace/openshift-must-gather-xm4wq created [must-gather ] OUT clusterrolebinding.rbac.authorization.k8s.io/must-gather-2bd8x created [must-gather ] OUT pod for plug-in image quay.io/openshift-release-dev/ocp-v4.0-art-dev@sha256:125f183d13601537ff15b3239df95d47f0a604da2847b561151fedd699f5e3a5 createdTo show AWS EFS Operator errors, view the
ClusterCSIDriverstatus:$ oc get clustercsidriver efs.csi.aws.com -o yamlIf a volume cannot be mounted to a pod (as shown in the output of the following command):
$ oc describe pod ... Type Reason Age From Message ---- ------ ---- ---- ------- Normal Scheduled 2m13s default-scheduler Successfully assigned default/efs-app to ip-10-0-135-94.ec2.internal Warning FailedMount 13s kubelet MountVolume.SetUp failed for volume "pvc-d7c097e6-67ec-4fae-b968-7e7056796449" : rpc error: code = DeadlineExceeded desc = context deadline exceeded1 Warning FailedMount 10s kubelet Unable to attach or mount volumes: unmounted volumes=[persistent-storage], unattached volumes=[persistent-storage kube-api-access-9j477]: timed out waiting for the condition- 1
- Warning message indicating volume not mounted.
This error is frequently caused by AWS dropping packets between an OpenShift Dedicated node and Amazon EFS.
Check that the following are correct:
- AWS firewall and Security Groups
- Networking: port number and IP addresses
5.4.12. Uninstalling the AWS EFS CSI Driver Operator
All EFS PVs are inaccessible after uninstalling the AWS EFS CSI Driver Operator (a Red Hat operator).
Prerequisites
- Access to the OpenShift Dedicated web console.
Procedure
To uninstall the AWS EFS CSI Driver Operator from the web console:
- Log in to the web console.
- Stop all applications that use AWS EFS PVs.
Delete all AWS EFS PVs:
-
Click Storage
PersistentVolumeClaims. - Select each PVC that is in use by the AWS EFS CSI Driver Operator, click the drop-down menu on the far right of the PVC, and then click Delete PersistentVolumeClaims.
-
Click Storage
Uninstall the AWS EFS CSI driver:
NoteBefore you can uninstall the Operator, you must remove the CSI driver first.
-
Click Administration
CustomResourceDefinitions ClusterCSIDriver. - On the Instances tab, for efs.csi.aws.com, on the far left side, click the drop-down menu, and then click Delete ClusterCSIDriver.
- When prompted, click Delete.
-
Click Administration
Uninstall the AWS EFS CSI Operator:
-
Click Ecosystem
Installed Operators. - On the Installed Operators page, scroll or type AWS EFS CSI into the Search by name box to find the Operator, and then click it.
-
On the upper, right of the Installed Operators > Operator details page, click Actions
Uninstall Operator. When prompted on the Uninstall Operator window, click the Uninstall button to remove the Operator from the namespace. Any applications deployed by the Operator on the cluster need to be cleaned up manually.
After uninstalling, the AWS EFS CSI Driver Operator is no longer listed in the Installed Operators section of the web console.
-
Click Ecosystem
Before you can destroy a cluster (openshift-install destroy cluster), you must delete the EFS volume in AWS. An OpenShift Dedicated cluster cannot be destroyed when there is an EFS volume that uses the cluster’s VPC. Amazon does not allow deletion of such a VPC.
5.5. GCP PD CSI Driver Operator
5.5.1. Overview
OpenShift Dedicated can provision persistent volumes (PVs) using the Container Storage Interface (CSI) driver for Google Cloud Platform (GCP) persistent disk (PD) storage.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a Container Storage Interface (CSI) Operator and driver.
To create CSI-provisioned persistent volumes (PVs) that mount to GCP PD storage assets, OpenShift Dedicated installs the GCP PD CSI Driver Operator and the GCP PD CSI driver by default in the openshift-cluster-csi-drivers namespace.
- GCP PD CSI Driver Operator: By default, the Operator provides a storage class that you can use to create PVCs. You can disable this default storage class if desired (see Managing the default storage class). You also have the option to create the GCP PD storage class as described in Persistent storage using GCE Persistent Disk.
GCP PD driver: The driver enables you to create and mount GCP PD PVs.
GCP PD CSI driver supports the C3 instance type for bare metal and N4 machine series. The C3 instance type and N4 machine series support the hyperdisk-balanced disks and hyperdisk-balanced high-availability disks. For more information, see Section C3 instance type for bare metal and N4 machine series.
5.5.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Dedicated users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
5.5.3. Reducing permissions while using the GCP PD CSI Driver Operator
The default installation allows the Google Cloud Platform (GCP) persistent disk (PD) Container Storage Interface (CSI) Driver to impersonate any service account in the Google Cloud project. You can reduce the scope of permissions granted to the GCP PD CSI Driver service account in your Google Cloud project to only the required node service accounts.
To reduce permissions, grant the iam.serviceAccountUser role to the control plane and compute node service accounts, and then remove the iam.serviceAccountUser role from the project-wide service account, thus reducing the scope of the permission.
Reducing permissions only applies to GCP clusters using Workload Identity Federation (WIF).
Procedure
Grant scoped
iam.serviceAccountUserrole for node service accounts by running the following Bash commands:gcloud iam service-accounts add-iam-policy-binding "${MASTER_NODE_SA}" --project="${GOOGLE_PROJECT_ID}" --member="serviceAccount:${SERVICE_ACCOUNT_EMAIL}" --role="roles/iam.serviceAccountUser" --condition=None gcloud iam service-accounts add-iam-policy-binding "${WORKER_NODE_SA}" --project="${GOOGLE_PROJECT_ID}" --member="serviceAccount:${SERVICE_ACCOUNT_EMAIL}" --role="roles/iam.serviceAccountUser" --condition=None-
GOOGLE_PROJECT_ID: The unique ID of your Google Cloud project. -
SERVICE_ACCOUNT_EMAIL: The email address of the "Member" (the person or service account) who is being granted the new permissions. To find the service account, on WIF clusters, there is a default service account on GCP for the CSI driver based on the cluster name, for example:${CLUSTER_NAME}-openshift-gcp-pd-csi-*. -
MASTER_NODE_SA: The email address of the service account used by your cluster’s master node. -
WORKER_NODE_SA: The email address of the service account used by your cluster’s worker nodes.
-
Remove project-level
iam.serviceAccountUserrole from the binding created by the installation program by running the following Bash commands:gcloud projects remove-iam-policy-binding "${GOOGLE_PROJECT_ID}" --member="serviceAccount:${SERVICE_ACCOUNT_EMAIL}" --role="roles/iam.serviceAccountUser" --condition=None-
SERVICE_ACCOUNT_EMAIL: The email address of the account losing the permission. For example,my-app-sa@my-project.iam.gserviceaccount.com. To find the service account, on WIF clusters, there is a default service account on GCP for the CSI driver based on the cluster name, for example:${CLUSTER_NAME}-openshift-gcp-pd-csi-*. -
GOOGLE_PROJECT_ID: The unique ID of the Google Cloud project where this is occurring. For example,prod-data-789.
-
5.5.4. GCP PD CSI driver storage class parameters
The Google Cloud Platform (GCP) persistent disk (PD) Container Storage Interface (CSI) driver uses the CSI external-provisioner sidecar as a controller. This is a separate helper container that is deployed with the CSI driver. The sidecar manages persistent volumes (PVs) by triggering the CreateVolume operation.
The GCP PD CSI driver uses the csi.storage.k8s.io/fstype parameter key to support dynamic provisioning. The following table describes all the GCP PD CSI storage class parameters that are supported by OpenShift Dedicated.
| Parameter | Values | Default | Description |
|---|---|---|---|
|
|
|
| Allows you to choose between standard PVs or solid-state-drive PVs. The driver does not validate the value, thus all the possible values are accepted.
For |
|
|
|
| Allows you to choose between zonal or regional PVs. |
|
| Fully qualified resource identifier for the key to use to encrypt new disks. | Empty string | Uses customer-managed encryption keys (CMEK) to encrypt new disks. |
5.5.5. C3 instance type for bare metal and N4 machine series
5.5.5.1. C3 and N4 instance type limitations
The GCP PD CSI driver support for the C3 instance type for bare metal and N4 machine series have the following limitations:
- You must set the volume size to at least 4Gi when you create hyperdisk-balanced disks. OpenShift Dedicated does not round up to the minimum size, so you must specify the correct size yourself.
- Cloning volumes is not supported when using storage pools.
- For cloning or resizing, hyperdisk-balanced disks original volume size must be 6Gi or greater.
The default storage class is standard-csi.
ImportantYou need to manually create a storage class.
For information about creating the storage class, see Step 2 in Section Setting up hyperdisk-balanced disks.
5.5.5.2. Hyperdisk-balanced high availability disks overview
OpenShift Dedicated supports Hyperdisk Balanced High Availability volumes.
Hyperdisk Balanced High Availability volumes are useful for:
- Protecting your applications from a zonal outage by synchronously replicating data across two zones in the same region
- When you require write access to the same volume in multiple zones
Volume Attributes Classes (VAC) does not work on Hyperdisk Balanced High Availability disks.
To set up Hyperdisk Balanced High Availability disks, see Section Setting up hyperdisk-balanced disks.
5.5.5.3. Storage pools for hyperdisk-balanced disks overview
Hyperdisk storage pools can be used with Compute Engine for large-scale storage. A hyperdisk storage pool is a purchased collection of capacity, throughput, and IOPS, which you can then provision for your applications as needed. You can use hyperdisk storage pools to create and manage disks in pools and use the disks across multiple workloads. By managing disks in aggregate, you can save costs while achieving expected capacity and performance growth. By using only the storage that you need in hyperdisk storage pools, you reduce the complexity of forecasting capacity and reduce management by going from managing hundreds of disks to managing a single storage pool.
To set up storage pools, see Setting up hyperdisk-balanced disks.
5.5.5.4. Setting up hyperdisk-balanced disks
Prerequisites
- Access to the cluster with administrative privileges
Procedure
Complete the following steps to set up hyperdisk-balanced disks:
- Create an OpenShift Dedicated cluster on Google Cloud with attached disks provisioned with hyperdisk-balanced disks. This can be achieved by provisioning the cluster with compute node types that support hyperdisk-balanced disks, such as the C3 and N4 machine series from Google Cloud.
Once the OSD cluster is ready, navigate to the OpenShift console for Storage Class creation. Within the console, navigate to the Storage section to create a Storage Class specifying the hyperdisk-balanced disk:
Example StorageClass YAML file
kind: StorageClass apiVersion: storage.k8s.io/v1 metadata: name: hyperdisk-sc1 annotations: storageclass.kubernetes.io/is-default-class: 'true' provisioner: pd.csi.storage.gke.io2 parameters: replication-type: none storage-pools: projects/myproject/zones/us-east1-c/storagePools/hyperdisk-storagepool3 type: hyperdisk-balanced4 reclaimPolicy: Delete allowVolumeExpansion: true volumeBindingMode: Immediate- 1
- Specify the name for your storage class. In this example, the name is
hyperdisk-sc. - 2
- Specify the GCP CSI provisioner as
pd.csi.storage.gke.io. - 3
- If using storage pools, specify a list of specific storage pools that you want to use in the following format:
projects/PROJECT_ID/zones/ZONE/storagePools/STORAGE_POOL_NAME. - 4
- Specify the disk type as
hyperdisk-balanced.
NoteIf you use storage pools, you must first create a Hyperdisk Storage Pool of the type "Hyperdisk Balanced" in the Google Cloud console prior to referencing it in the OpenShift Storage Class. The Hyperdisk Storage Pool must be created in the same zone as the compute node supporting Hyperdisk is installed in the cluster configuration. For more information about creating a Hyperdisk Storage Pool, see Create a Hyperdisk Storage Pool in the Google Cloud documentation.
Create a persistent volume claim (PVC) that uses the hyperdisk-specific storage class using the following example YAML file:
Example PVC YAML file
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: my-pvc spec: storageClassName: hyperdisk-sc1 accessModes: - ReadWriteOnce resources: requests: storage: 2048Gi2 Create a deployment that uses the PVC that you just created. Using a deployment helps ensure that your application has access to the persistent storage even after the pod restarts and rescheduling:
- Ensure a node pool with the specified machine series is up and running before creating the deployment. Otherwise, the pod fails to schedule.
Use the following example YAML file to create the deployment:
Example deployment YAML file
apiVersion: apps/v1 kind: Deployment metadata: name: postgres spec: selector: matchLabels: app: postgres template: metadata: labels: app: postgres spec: nodeSelector: cloud.google.com/machine-family: n41 containers: - name: postgres image: postgres:14-alpine args: [ "sleep", "3600" ] volumeMounts: - name: sdk-volume mountPath: /usr/share/data/ volumes: - name: sdk-volume persistentVolumeClaim: claimName: my-pvc2 Confirm that the deployment was successfully created by running the following command:
$ oc get deploymentExample output
NAME READY UP-TO-DATE AVAILABLE AGE postgres 0/1 1 0 42sIt might take a few minutes for hyperdisk instances to complete provisioning and display a READY status.
Confirm that PVC
my-pvchas been successfully bound to a persistent volume (PV) by running the following command:$ oc get pvc my-pvcExample output
NAME STATUS VOLUME CAPACITY ACCESS MODES STORAGECLASS VOLUMEATTRIBUTESCLASS AGE my-pvc Bound pvc-1ff52479-4c81-4481-aa1d-b21c8f8860c6 2Ti RWO hyperdisk-sc <unset> 2m24sConfirm the expected configuration of your hyperdisk-balanced disk:
$ gcloud compute disks listExample output
NAME LOCATION LOCATION_SCOPE SIZE_GB TYPE STATUS instance-20240914-173145-boot us-central1-a zone 150 pd-standard READY instance-20240914-173145-data-workspace us-central1-a zone 100 pd-balanced READY c4a-rhel-vm us-central1-a zone 50 hyperdisk-balanced READY1 - 1
- Hyperdisk-balanced disk.
If using storage pools, check that the volume is provisioned as specified in your storage class and PVC by running the following command:
$ gcloud compute storage-pools list-disks pool-us-east4-c --zone=us-east4-cExample output
NAME STATUS PROVISIONED_IOPS PROVISIONED_THROUGHPUT SIZE_GB pvc-1ff52479-4c81-4481-aa1d-b21c8f8860c6 READY 3000 140 2048
5.5.6. Creating a custom-encrypted persistent volume
When you create a PersistentVolumeClaim object, OpenShift Dedicated provisions a new persistent volume (PV) and creates a PersistentVolume object. You can add a custom encryption key in Google Cloud Platform (GCP) to protect a PV in your cluster by encrypting the newly created PV.
For encryption, the newly attached PV that you create uses customer-managed encryption keys (CMEK) on a cluster by using a new or existing Google Cloud Key Management Service (KMS) key.
Prerequisites
- You are logged in to a running OpenShift Dedicated cluster.
- You have created a Cloud KMS key ring and key version.
For more information about CMEK and Cloud KMS resources, see Using customer-managed encryption keys (CMEK).
Procedure
To create a custom-encrypted PV, complete the following steps:
Create a storage class with the Cloud KMS key. The following example enables dynamic provisioning of encrypted volumes:
apiVersion: storage.k8s.io/v1 kind: StorageClass metadata: name: csi-gce-pd-cmek provisioner: pd.csi.storage.gke.io volumeBindingMode: "WaitForFirstConsumer" allowVolumeExpansion: true parameters: type: pd-standard disk-encryption-kms-key: projects/<key-project-id>/locations/<location>/keyRings/<key-ring>/cryptoKeys/<key>1 - 1
- This field must be the resource identifier for the key that will be used to encrypt new disks. Values are case-sensitive. For more information about providing key ID values, see Retrieving a resource’s ID and Getting a Cloud KMS resource ID.
NoteYou cannot add the
disk-encryption-kms-keyparameter to an existing storage class. However, you can delete the storage class and recreate it with the same name and a different set of parameters. If you do this, the provisioner of the existing class must bepd.csi.storage.gke.io.Deploy the storage class on your OpenShift Dedicated cluster using the
occommand:$ oc describe storageclass csi-gce-pd-cmekExample output
Name: csi-gce-pd-cmek IsDefaultClass: No Annotations: None Provisioner: pd.csi.storage.gke.io Parameters: disk-encryption-kms-key=projects/key-project-id/locations/location/keyRings/ring-name/cryptoKeys/key-name,type=pd-standard AllowVolumeExpansion: true MountOptions: none ReclaimPolicy: Delete VolumeBindingMode: WaitForFirstConsumer Events: noneCreate a file named
pvc.yamlthat matches the name of your storage class object that you created in the previous step:kind: PersistentVolumeClaim apiVersion: v1 metadata: name: podpvc spec: accessModes: - ReadWriteOnce storageClassName: csi-gce-pd-cmek resources: requests: storage: 6GiNoteIf you marked the new storage class as default, you can omit the
storageClassNamefield.Apply the PVC on your cluster:
$ oc apply -f pvc.yamlGet the status of your PVC and verify that it is created and bound to a newly provisioned PV:
$ oc get pvcExample output
NAME STATUS VOLUME CAPACITY ACCESS MODES STORAGECLASS AGE podpvc Bound pvc-e36abf50-84f3-11e8-8538-42010a800002 10Gi RWO csi-gce-pd-cmek 9sNoteIf your storage class has the
volumeBindingModefield set toWaitForFirstConsumer, you must create a pod to use the PVC before you can verify it.
Your CMEK-protected PV is now ready to use with your OpenShift Dedicated cluster.
5.6. Google Cloud Filestore CSI Driver Operator
5.6.1. Overview
OpenShift Dedicated is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for Google Compute Platform (GCP) Filestore Storage.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a CSI Operator and driver.
To create CSI-provisioned PVs that mount to Google Cloud Filestore Storage assets, you install the Google Cloud Filestore CSI Driver Operator and the Google Cloud Filestore CSI driver in the openshift-cluster-csi-drivers namespace.
- The Google Cloud Filestore CSI Driver Operator does not provide a storage class by default, but you can create one if needed. The Google Cloud Filestore CSI Driver Operator supports dynamic volume provisioning by allowing storage volumes to be created on demand, eliminating the need for cluster administrators to pre-provision storage.
- The Google Cloud Filestore CSI driver enables you to create and mount Google Cloud Filestore PVs.
OpenShift Dedicated Google Cloud Filestore supports Workload Identity. This allows users to access Google Cloud resources using federated identities instead of a service account key. GCP Workload Identity must be enabled globally during installation, and then configured for the Google Cloud Filestore CSI Driver Operator.
5.6.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plugins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Dedicated users storage options, such as volume snapshots, that are not possible with in-tree volume plugins.
5.6.3. Installing the Google Cloud Filestore CSI Driver Operator
5.6.3.1. Preparing to install the Google Cloud Filestore CSI Driver Operator with Workload Identity
If you are planning to use GCP Workload Identity with Google Compute Platform Filestore, you must obtain certain parameters that you will use during the installation of the Google Cloud Filestore Container Storage Interface (CSI) Driver Operator.
Prerequisites
- Access to the cluster as a user with the cluster-admin role.
Procedure
To prepare to install the Google Cloud Filestore CSI Driver Operator with Workload Identity:
Obtain the project number:
Obtain the project ID by running the following command:
$ export PROJECT_ID=$(oc get infrastructure/cluster -o jsonpath='{.status.platformStatus.gcp.projectID}')Obtain the project number, using the project ID, by running the following command:
$ gcloud projects describe $PROJECT_ID --format="value(projectNumber)"
Find the identity pool ID and the provider ID:
During cluster installation, the names of these resources are provided to the Cloud Credential Operator utility (
ccoctl) with the--name parameter. See "Creating Google Cloud resources with the Cloud Credential Operator utility".Create Workload Identity resources for the Google Cloud Filestore Operator:
Create a
CredentialsRequestfile using the following example file:Example Credentials Request YAML file
apiVersion: cloudcredential.openshift.io/v1 kind: CredentialsRequest metadata: name: openshift-gcp-filestore-csi-driver-operator namespace: openshift-cloud-credential-operator annotations: include.release.openshift.io/self-managed-high-availability: "true" include.release.openshift.io/single-node-developer: "true" spec: serviceAccountNames: - gcp-filestore-csi-driver-operator - gcp-filestore-csi-driver-controller-sa secretRef: name: gcp-filestore-cloud-credentials namespace: openshift-cluster-csi-drivers providerSpec: apiVersion: cloudcredential.openshift.io/v1 kind: GCPProviderSpec predefinedRoles: - roles/file.editor - roles/resourcemanager.tagUser skipServiceCheck: trueUse the
CredentialsRequestfile to create a Google Cloud service account by running the following command:$ ./ccoctl gcp create-service-accounts --name=<filestore-service-account> \1 --workload-identity-pool=<workload-identity-pool> \2 --workload-identity-provider=<workload-identity-provider> \3 --project=<project-id> \4 --credentials-requests-dir=/tmp/credreq5 Example output
2025/02/10 17:47:39 Credentials loaded from gcloud CLI defaults 2025/02/10 17:47:42 IAM service account filestore-service-account-openshift-gcp-filestore-csi-driver-operator created 2025/02/10 17:47:44 Unable to add predefined roles to IAM service account, retrying... 2025/02/10 17:47:59 Updated policy bindings for IAM service account filestore-service-account-openshift-gcp-filestore-csi-driver-operator 2025/02/10 17:47:59 Saved credentials configuration to: /tmp/install-dir/1 openshift-cluster-csi-drivers-gcp-filestore-cloud-credentials-credentials.yaml- 1
- The current directory.
Find the service account email of the newly created service account by running the following command:
$ cat /tmp/install-dir/manifests/openshift-cluster-csi-drivers-gcp-filestore-cloud-credentials-credentials.yaml | yq '.data["service_account.json"]' | base64 -d | jq '.service_account_impersonation_url'Example output
https://iamcredentials.googleapis.com/v1/projects/-/serviceAccounts/filestore-se-openshift-g-ch8cm@openshift-gce-devel.iam.gserviceaccount.com:generateAccessTokenIn this example output, the service account email is
filestore-se-openshift-g-ch8cm@openshift-gce-devel.iam.gserviceaccount.com.
Results
You now have the following parameters that you need to install the Google Cloud Filestore CSI Driver Operator:
- Project number - from Step 1.b
- Pool ID - from Step 2
- Provider ID - from Step 2
- Service account email - from Step 3.c
5.6.3.2. Installing the Google Cloud Filestore CSI Driver Operator
The Google Compute Platform (Google Cloud) Filestore Container Storage Interface (CSI) Driver Operator is not installed in OpenShift Dedicated by default. Use the following procedure to install the Google Cloud Filestore CSI Driver Operator in your cluster.
Prerequisites
- Access to the OpenShift Dedicated web console.
- If using GCP Workload Identity, certain GCP Workload Identity parameters are needed. See the preceding Section Preparing to install the Google Cloud Filestore CSI Driver Operator with Workload Identity.
Procedure
To install the Google Cloud Filestore CSI Driver Operator from the web console:
- Log in to the OpenShift Cluster Manager.
- Select your cluster.
- Click Open console and log in with your credentials.
Enable the Filestore API in the GCE project by running the following command:
$ gcloud services enable file.googleapis.com --project <my_gce_project>1 - 1
- Replace
<my_gce_project>with your Google Cloud project.
You can also do this using Google Cloud web console.
Install the Google Cloud Filestore CSI Operator:
-
Click Ecosystem
Software Catalog. - Locate the Google Cloud Filestore CSI Operator by typing Google Cloud Filestore in the filter box.
- Click the Google Cloud Filestore CSI Driver Operator button.
- On the Google Cloud Filestore CSI Driver Operator page, click Install.
On the Install Operator page, ensure that:
- All namespaces on the cluster (default) is selected.
Installed Namespace is set to openshift-cluster-csi-drivers.
If using GCP Workload Identity, enter values for the following fields obtained from the procedure in Section Preparing to install the Google Cloud Filestore CSI Driver Operator with Workload Identity:
- Google Cloud Project Number
- Google Cloud Pool ID
- Google Cloud Provider ID
- Google Cloud Service Account Email
Click Install.
After the installation finishes, the Google Cloud Filestore CSI Operator is listed in the Installed Operators section of the web console.
-
Click Ecosystem
Install the Google Cloud Filestore CSI Driver:
-
Click administration
CustomResourceDefinitions ClusterCSIDriver. On the Instances tab, click Create ClusterCSIDriver.
Use the following YAML file:
apiVersion: operator.openshift.io/v1 kind: ClusterCSIDriver metadata: name: filestore.csi.storage.gke.io spec: managementState: Managed- Click Create.
Wait for the following Conditions to change to a "true" status:
- GCPFilestoreDriverCredentialsRequestControllerAvailable
- GCPFilestoreDriverNodeServiceControllerAvailable
- GCPFilestoreDriverControllerServiceControllerAvailable
-
Click administration
5.6.4. Creating a storage class for GCP Filestore Storage
After installing the Operator, you should create a storage class for dynamic provisioning of Google Compute Platform (GCP) Filestore volumes.
Prerequisites
- You are logged in to the running OpenShift Dedicated cluster.
Procedure
To create a storage class:
Create a storage class using the following example YAML file:
Example YAML file
kind: StorageClass apiVersion: storage.k8s.io/v1 metadata: name: filestore-csi provisioner: filestore.csi.storage.gke.io parameters: connect-mode: DIRECT_PEERING1 network: network-name2 allowVolumeExpansion: true volumeBindingMode: WaitForFirstConsumerSpecify the name of the VPC network where Filestore instances should be created in.
It is recommended to specify the VPC network that the Filestore instances should be created in. If no VPC network is specified, the Container Storage Interface (CSI) driver tries to create the instances in the default VPC network of the project.
On IPI installations, the VPC network name is typically the cluster name with the suffix "-network". However, on UPI installations, the VPC network name can be any value chosen by the user.
For a shared VPC (
connect-mode=PRIVATE_SERVICE_ACCESS), the network needs to be the full VPC name. For example:projects/shared-vpc-name/global/networks/gcp-filestore-network.You can find out the VPC network name by inspecting the
MachineSetsobjects with the following command:$ oc -n openshift-machine-api get machinesets -o yaml | grep "network:" - network: gcp-filestore-network (...)In this example, the VPC network name in this cluster is "gcp-filestore-network".
5.6.5. NFS export options
By default, a Filestore instance grants root level read/write access to all clients that share the same Google Cloud project and virtual private cloud (VPC) network. Network File System (NFS) export options can limit this access to certain IP ranges and specific user/group IDs for the Filestore instance. When creating a storage class, you can set these options using the nfs-export-options-on-create parameter.
Prerequisites
- Access to the cluster as a user with the cluster-admin role.
- The Google Cloud Filestore CSI Driver Operator and Google Cloud Filestore CSI driver installed.
Procedure
Create a storage class using a file similar to the following sample YAML file:
NoteFor more information about creating a storage class, see Section Creating a storage class for GCP Filestore Operator.
Example storage class YAML file with NFS export options
kind: StorageClass apiVersion: storage.k8s.io/v1 metadata: name: SC-name provisioner: filestore.csi.storage.gke.io parameters: connect-mode: DIRECT_PEERING network: project-network nfs-export-options-on-create: '[1 { "accessMode": "READ_WRITE",2 "squashMode": "NO_ROOT_SQUASH",3 "anonUid": 655344 "anonGid": 655345 "ipRanges": [6 "10.0.0.0/16" ] }]' allowVolumeExpansion: true- 1
- NFS export options parameter
- 2
- Access mode: Either
READ_ONLY,which allows only read requests on the exported directory; orREAD_WRITE, which allows both read and write requests. The default isREAD_WRITE. - 3
- Squash mode: Either
NO_ROOT_SQUASH, which allows root access on the exported directory; or ROOT_SQUASH, which does not allow root access. The default isNO_ROOT_SQUASH. - 4
- AnonUid: An integer representing the anonymous user ID with a default value of 65534.
AnonUidcan only be set withsquashModeset toROOT_SQUASH; Otherwise, an error occurs. - 5
- AnonGid: An integer representing the anonymous group ID with a default value of 65534.
AnonGidcan only be set withsquashModeset toROOT_SQUASH. Otherwise, an error occurs. - 6
- IP ranges: List of either an IPv4 addresses in the format {octet1}.{octet2}.{octet3}.{octet4}, or CIDR ranges in the format {octet1}.{octet2}.{octet3}.{octet4}/{mask size}, which can mount the file share. Overlapping IP ranges are not allowed, both within and across NfsExportOptions, otherwise, an error is returned. The limit is 64 IP ranges or addresses for each
FileShareConfigamong all NFS export options.
5.6.6. Destroying clusters and GCP Filestore
Typically, if you destroy a cluster, the OpenShift Dedicated installer deletes all of the cloud resources that belong to that cluster. However, due to the special nature of the Google Compute Platform (GCP) Filestore resources, the automated cleanup process might not remove all of them in some rare cases.
Therefore, Red Hat recommends that you verify that all cluster-owned Filestore resources are deleted by the uninstall process.
Procedure
To ensure that all GCP Filestore PVCs have been deleted:
- Access your Google Cloud account using the GUI or CLI.
Search for any resources with the
kubernetes-io-cluster-${CLUSTER_ID}=ownedlabel.Since the cluster ID is unique to the deleted cluster, there should not be any remaining resources with that cluster ID.
- In the unlikely case there are some remaining resources, delete them.