ROSA の学習
Red Hat OpenShift Service on AWS の学習
概要
第1章 クラスターの作成のワークショップ
1.1. クラスターの作成
このワークショップに従ってサンプル Red Hat OpenShift Service on AWS クラスターをデプロイします。その後、次のワークショップでクラスターを使用できます。
1.1.1. ワークショップの目的
このワークショップでは、必要な前提条件とともにクラスターを作成する方法を学びます。
クラスター作成の前提条件を学習します。
- サンプル Virtual Private Cloud (VPC) の作成
- サンプル OpenID Connect (OIDC) リソースの作成
- サンプル環境変数を作成します。
- サンプル Red Hat OpenShift Service on AWS クラスターのデプロイ
1.1.1.1. 前提条件
- Red Hat OpenShift Service on AWS バージョン 1.2.31 以降。
- Amazon Web Services (AWS) コマンドラインインターフェイス (CLI)
-
ROSA コマンドラインインターフェイス (CLI) (
rosa)
1.1.2. VPC の作成
Red Hat OpenShift Service on AWS クラスターをデプロイする前に、VPC リソースと OIDC リソースの両方が必要です。そのため、最初にこれらのリソースを作成します。Red Hat OpenShift Service on AWS は、Bring Your Own VPC (BYO-VPC) モデルを使用します。
手順
AWS CLI (
aws) が Red Hat OpenShift Service on AWS が利用可能なリージョンを使用するように設定されていることを確認します。次のコマンドを実行して、AWS CLI でサポートされているリージョンを確認します。$ rosa list regions --hosted-cpVPC を作成します。このワークショップでは、次の スクリプト で VPC とその必須コンポーネントを作成します。
awsCLI で設定されたリージョンを使用します。#!/bin/bash set -e ########## # This script will create the network requirements for a ROSA cluster. This will be # a public cluster. This creates: # - VPC # - Public and private subnets # - Internet Gateway # - Relevant route tables # - NAT Gateway # # This will automatically use the region configured for the aws cli # ########## VPC_CIDR=10.0.0.0/16 PUBLIC_CIDR_SUBNET=10.0.1.0/24 PRIVATE_CIDR_SUBNET=10.0.0.0/24 # Create VPC echo -n "Creating VPC..." VPC_ID=$(aws ec2 create-vpc --cidr-block $VPC_CIDR --query Vpc.VpcId --output text) # Create tag name aws ec2 create-tags --resources $VPC_ID --tags Key=Name,Value=$CLUSTER_NAME # Enable dns hostname aws ec2 modify-vpc-attribute --vpc-id $VPC_ID --enable-dns-hostnames echo "done." # Create Public Subnet echo -n "Creating public subnet..." PUBLIC_SUBNET_ID=$(aws ec2 create-subnet --vpc-id $VPC_ID --cidr-block $PUBLIC_CIDR_SUBNET --query Subnet.SubnetId --output text) aws ec2 create-tags --resources $PUBLIC_SUBNET_ID --tags Key=Name,Value=$CLUSTER_NAME-public echo "done." # Create private subnet echo -n "Creating private subnet..." PRIVATE_SUBNET_ID=$(aws ec2 create-subnet --vpc-id $VPC_ID --cidr-block $PRIVATE_CIDR_SUBNET --query Subnet.SubnetId --output text) aws ec2 create-tags --resources $PRIVATE_SUBNET_ID --tags Key=Name,Value=$CLUSTER_NAME-private echo "done." # Create an internet gateway for outbound traffic and attach it to the VPC. echo -n "Creating internet gateway..." IGW_ID=$(aws ec2 create-internet-gateway --query InternetGateway.InternetGatewayId --output text) echo "done." aws ec2 create-tags --resources $IGW_ID --tags Key=Name,Value=$CLUSTER_NAME aws ec2 attach-internet-gateway --vpc-id $VPC_ID --internet-gateway-id $IGW_ID > /dev/null 2>&1 echo "Attached IGW to VPC." # Create a route table for outbound traffic and associate it to the public subnet. echo -n "Creating route table for public subnet..." PUBLIC_ROUTE_TABLE_ID=$(aws ec2 create-route-table --vpc-id $VPC_ID --query RouteTable.RouteTableId --output text) aws ec2 create-tags --resources $PUBLIC_ROUTE_TABLE_ID --tags Key=Name,Value=$CLUSTER_NAME echo "done." aws ec2 create-route --route-table-id $PUBLIC_ROUTE_TABLE_ID --destination-cidr-block 0.0.0.0/0 --gateway-id $IGW_ID > /dev/null 2>&1 echo "Created default public route." aws ec2 associate-route-table --subnet-id $PUBLIC_SUBNET_ID --route-table-id $PUBLIC_ROUTE_TABLE_ID > /dev/null 2>&1 echo "Public route table associated" # Create a NAT gateway in the public subnet for outgoing traffic from the private network. echo -n "Creating NAT Gateway..." NAT_IP_ADDRESS=$(aws ec2 allocate-address --domain vpc --query AllocationId --output text) NAT_GATEWAY_ID=$(aws ec2 create-nat-gateway --subnet-id $PUBLIC_SUBNET_ID --allocation-id $NAT_IP_ADDRESS --query NatGateway.NatGatewayId --output text) aws ec2 create-tags --resources $NAT_IP_ADDRESS --resources $NAT_GATEWAY_ID --tags Key=Name,Value=$CLUSTER_NAME sleep 10 echo "done." # Create a route table for the private subnet to the NAT gateway. echo -n "Creating a route table for the private subnet to the NAT gateway..." PRIVATE_ROUTE_TABLE_ID=$(aws ec2 create-route-table --vpc-id $VPC_ID --query RouteTable.RouteTableId --output text) aws ec2 create-tags --resources $PRIVATE_ROUTE_TABLE_ID $NAT_IP_ADDRESS --tags Key=Name,Value=$CLUSTER_NAME-private aws ec2 create-route --route-table-id $PRIVATE_ROUTE_TABLE_ID --destination-cidr-block 0.0.0.0/0 --gateway-id $NAT_GATEWAY_ID > /dev/null 2>&1 aws ec2 associate-route-table --subnet-id $PRIVATE_SUBNET_ID --route-table-id $PRIVATE_ROUTE_TABLE_ID > /dev/null 2>&1 echo "done." # echo "***********VARIABLE VALUES*********" # echo "VPC_ID="$VPC_ID # echo "PUBLIC_SUBNET_ID="$PUBLIC_SUBNET_ID # echo "PRIVATE_SUBNET_ID="$PRIVATE_SUBNET_ID # echo "PUBLIC_ROUTE_TABLE_ID="$PUBLIC_ROUTE_TABLE_ID # echo "PRIVATE_ROUTE_TABLE_ID="$PRIVATE_ROUTE_TABLE_ID # echo "NAT_GATEWAY_ID="$NAT_GATEWAY_ID # echo "IGW_ID="$IGW_ID # echo "NAT_IP_ADDRESS="$NAT_IP_ADDRESS echo "Setup complete." echo "" echo "To make the cluster create commands easier, please run the following commands to set the environment variables:" echo "export PUBLIC_SUBNET_ID=$PUBLIC_SUBNET_ID" echo "export PRIVATE_SUBNET_ID=$PRIVATE_SUBNET_ID"スクリプトはコマンドを出力します。後で使用するためにサブネット ID を保存するには、コマンドを環境変数として設定します。以下のコマンドをコピーして実行します。
$ export PUBLIC_SUBNET_ID=$PUBLIC_SUBNET_ID $ export PRIVATE_SUBNET_ID=$PRIVATE_SUBNET_ID次のコマンドを実行して、環境変数を確認します。
$ echo "Public Subnet: $PUBLIC_SUBNET_ID"; echo "Private Subnet: $PRIVATE_SUBNET_ID"出力例
Public Subnet: subnet-0faeeeb0000000000 Private Subnet: subnet-011fe340000000000
1.1.2.1. OIDC 設定の作成
このワークショップでは、OIDC 設定を作成するときに自動モードを使用します。また、後で使用できるように、OIDC ID を環境変数として保存します。このコマンドは、ROSA CLI を使用して、クラスターの一意の OIDC 設定を作成します。
次のコマンドを実行して、OIDC 設定を作成します。
$ export OIDC_ID=$(rosa create oidc-config --mode auto --managed --yes -o json | jq -r '.id')
1.1.3. 追加の環境変数の作成
環境変数を設定するには、次のコマンドを実行します。これらの変数により、Red Hat OpenShift Service on AWS クラスターを作成するコマンドの実行が容易になります。
$ export CLUSTER_NAME=<cluster_name> $ export REGION=<VPC_region>ヒントVPC リージョンを確認するには、
rosa whoamiを実行します。
1.1.4. クラスターの作成
オプション: Operator ポリシーや AWS IAM ロールとポリシーを含め、アカウント全体のロールとポリシーを作成するには次のコマンドを実行します。
重要このアカウントで 初めて Red Hat OpenShift Service on AWS をデプロイし、アカウントのロールとポリシーをまだ 作成していない 場合にのみ、この手順を完了してください。
$ rosa create account-roles --mode auto --yes次のコマンドを実行してクラスターを作成します。
$ rosa create cluster --cluster-name $CLUSTER_NAME \ --subnet-ids ${PUBLIC_SUBNET_ID},${PRIVATE_SUBNET_ID} \ --hosted-cp \ --region $REGION \ --oidc-config-id $OIDC_ID \ --sts --mode auto --yes
約 10 分後にクラスターの準備が完了します。選択したリージョン内の 3 つの AWS アベイラビリティーゾーンにまたがるコントロールプレーンがクラスターに作成され、AWS アカウントに 2 つのワーカーノードが作成されます。
1.1.5. インストールステータスの確認
次のコマンドのいずれかを実行して、クラスターのステータスを確認します。
クラスターのステータスの詳細を表示するには、次のコマンドを実行します。
$ rosa describe cluster --cluster $CLUSTER_NAMEクラスターのステータスの概要を表示するには、次のコマンドを実行します。
$ rosa list clustersログの進行状況を監視するには、次を実行します。
$ rosa logs install --cluster $CLUSTER_NAME --watch
- 状態が “ready” に変われば、クラスターのインストールは完了です。ワーカーノードがオンラインになるまでにさらに数分かかる場合があります。
1.2. 管理ユーザーの作成
管理 (admin) ユーザーを作成すると、クラスターにすばやくアクセスできるようになります。管理ユーザーを作成するには、次の手順に従います。
管理ユーザーは、このチュートリアル設定では問題なく機能します。実際のデプロイメントでは、正式なアイデンティティープロバイダー を使用してクラスターにアクセスし、ユーザーに管理権限を付与してください。
1.2.1. CLI を使用して管理者ユーザーを作成する
次のコマンドを実行して管理ユーザーを作成します。
$ rosa create admin --cluster=<cluster-name>出力例
W: It is recommended to add an identity provider to login to this cluster. See 'rosa create idp --help' for more information. I: Admin account has been added to cluster 'my-rosa-cluster'. It may take up to a minute for the account to become active. I: To login, run the following command: oc login https://api.my-rosa-cluster.abcd.p1.openshiftapps.com:6443 \ --username cluster-admin \ --password FWGYL-2mkJI-00000-00000前のステップで返されたログインコマンドをコピーし、ターミナルに貼り付けます。これにより、CLI を使用してクラスターにログインし、クラスターの使用を開始できるようになります。
$ oc login https://api.my-rosa-cluster.abcd.p1.openshiftapps.com:6443 \ > --username cluster-admin \ > --password FWGYL-2mkJI-00000-00000出力例
Login successful. You have access to 79 projects, the list has been suppressed. You can list all projects with ' projects' Using project "default".管理ユーザーとしてログインしていることを確認するには、次のコマンドのいずれかを実行します。
オプション 1:
$ oc whoami出力例
cluster-adminオプション 2:
oc get all -n openshift-apiserverこのコマンドをエラーなしで実行できるのは管理ユーザーのみです。
1.2.2. 次のステップ
1.3. アイデンティティープロバイダーのセットアップ
クラスターにログインするには、アイデンティティープロバイダー (IDP) をセットアップします。このチュートリアルでは、IDP の例として GitHub を使用します。Red Hat OpenShift Service on AWS でサポートされている IDP の完全なリストを参照してください。
1.3.1. IDP オプションについて
IDP を作成する前に、次のコマンドを実行してすべての IDP オプションを表示できます。
$ rosa create idp --help1.3.2. GitHub を使用した IDP のセットアップ
- GitHub アカウントにログインします。
自分が管理者となる新しい GitHub 組織を作成します。
ヒントすでに既存の組織の管理者であり、その組織を使用する場合は、ステップ 9 に進みます。
+ アイコンをクリックし、New Organization をクリックします。
- 状況に最も適したプランを選択するか、Join for free をクリックします。
組織のアカウント名、メールアドレス、および個人アカウントかビジネスアカウントかを入力します。Next をクリックします。

- オプション: 他のユーザーの GitHub ID を追加して、Red Hat OpenShift Service on AWS クラスターへのアクセス権を追加で付与します。後で追加することもできます。
- Complete Setup をクリックします。
- オプション: 次のページで、要求される情報を入力します。
- Submit をクリックします。
ターミナルに戻り、次のコマンドを入力して GitHub IDP を設定します。
rosa create idp --cluster=<cluster name> --interactive以下の値を設定します。
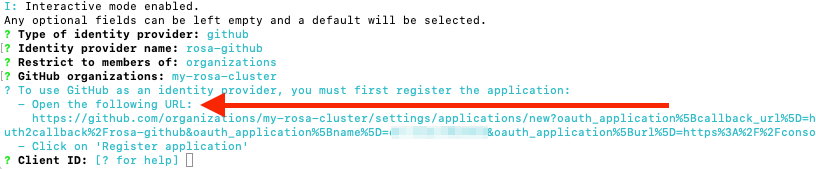
Type of identity provider: github Identity Provider Name: <IDP-name> Restrict to members of: organizations GitHub organizations: <organization-account-name>CLI にリンクが表示されます。リンクをコピーしてブラウザーに貼り付け、Enter を押します。これにより、このアプリケーションを OAuth に登録するために必要な情報が入力されます。情報を変更する必要はありません。
Register application をクリックします。

次のページに Client ID が表示されます。ID をコピーし、Client ID を要求するターミナルに ID を貼り付けます。
注記タブは閉じないでください。
CLI で Client Secret を求められます。ブラウザーに戻り、Generate a new client secret をクリックします。
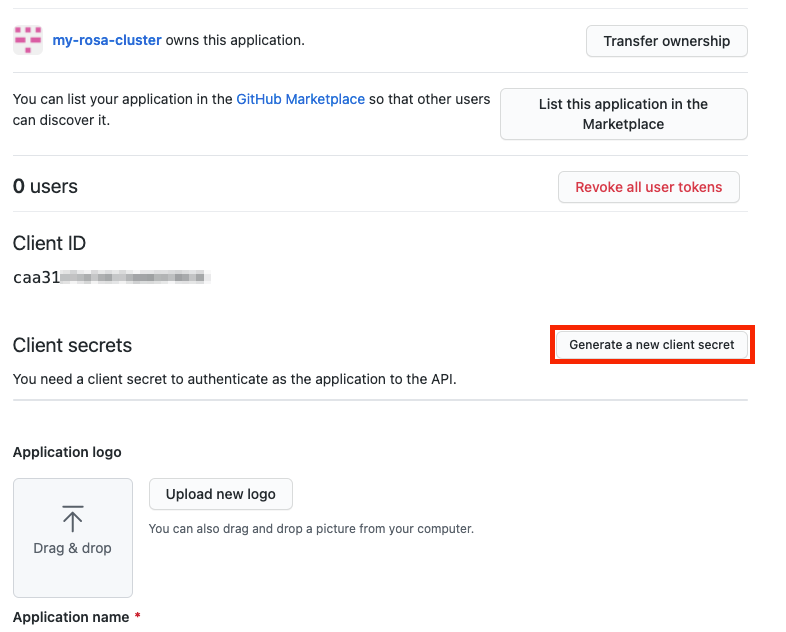
- シークレットが生成されます。シークレットは二度と表示されないため、コピーしてください。
- シークレットをターミナルに貼り付けて Enter を押します。
- GitHub Enterprise Hostname は空白のままにします。
- claim を選択します。
IDP が作成され、設定がクラスターに反映されるまで、約 1 分間待ちます。

返されたリンクをコピーし、ブラウザーに貼り付けます。新しい IDP を、選択した名前で利用できるはずです。IDP をクリックし、GitHub 認証情報を使用してクラスターにアクセスします。

1.3.2.1. 他のユーザーにクラスターへのアクセス権を付与する
他のクラスターユーザーにアクセス権を付与するには、その GitHub ユーザー ID を、このクラスターに使用する GitHub 組織に追加する必要があります。
- GitHub で、Your organizations ページに移動します。
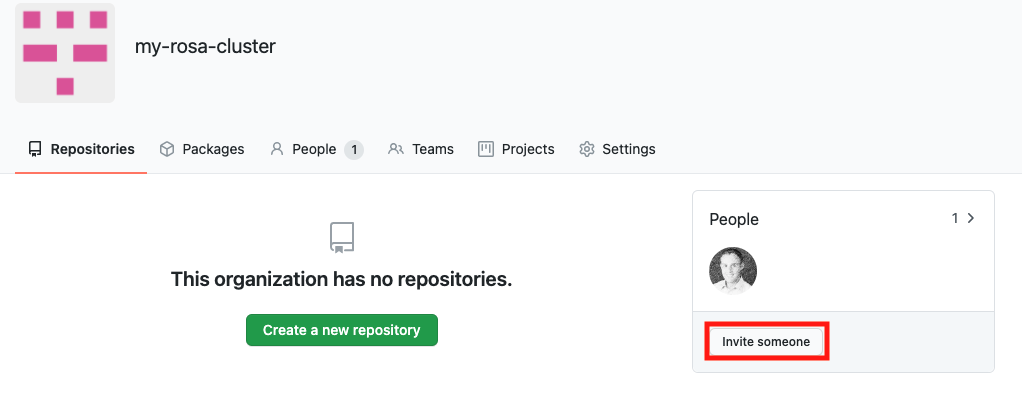
profile icon をクリックし、Your organizations をクリックします。次に、<自分の組織名> をクリックします。この例では、
my-rosa-clusterです。
Invite someone をクリックします。
- 新しいユーザーの GitHub ID を入力し、正しいユーザーを選択して、Invite をクリックします。
- 新しいユーザーが招待を承諾すると、Hybrid Cloud Console リンクと GitHub 認証情報を使用して Red Hat OpenShift Service on AWS クラスターにログインできるようになります。
1.4. 管理者特権の付与
管理 (admin) 権限は、クラスターに追加したユーザーに自動的には付与されません。特定のユーザーに管理レベルの権限を付与する場合は、各ユーザーに手動で権限を付与する必要があります。ROSA コマンドラインインターフェイス (CLI) (rosa) または Red Hat OpenShift Cluster Manager Web ユーザーインターフェイス (UI) のいずれかから管理権限を付与できます。
Red Hat は 2 種類の管理権限を提供します。
-
cluster-admin:cluster-admin権限は、管理ユーザーにクラスター内のすべての権限を付与します。 -
dedicated-admin:dedicated-admin権限を持つ管理ユーザーは、ほとんどの管理タスクを完了できますが、クラスターの破損を防ぐために一定の制限があります。権限の昇格が必要な場合は、dedicated-adminを使用することを推奨します。
管理者特権の詳細は、クラスターの管理 に関するドキュメントを参照してください。
1.4.1. ROSA CLI の使用
クラスターを作成したユーザーが、次のコマンドのいずれかを実行して管理権限を付与します。
cluster-adminの場合:$ rosa grant user cluster-admin --user <idp_user_name> --cluster=<cluster-name>dedicated-adminの場合:$ rosa grant user dedicated-admin --user <idp_user_name> --cluster=<cluster-name>
次のコマンドを実行して、管理権限が追加されたことを確認します。
$ rosa list users --cluster=<cluster-name>出力例
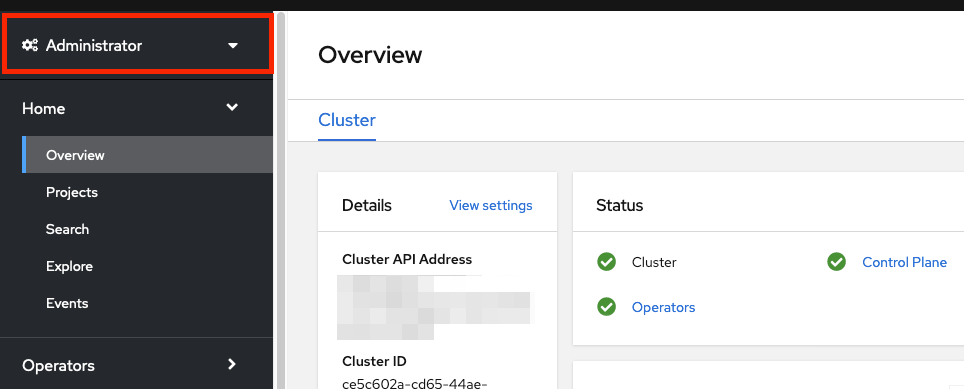
$ rosa list users --cluster=my-rosa-cluster ID GROUPS <idp_user_name> cluster-admins現在 Red Hat Hybrid Cloud Console にログインしている場合は、コンソールからログアウトし、クラスターに再度ログインして、"Administrator パネル" がある新しいパースペクティブを表示します。シークレットウィンドウまたはプライベートウィンドウが必要になる場合があります。
次のコマンドを実行して、アカウントに管理権限が追加されたことをテストすることもできます。このコマンドをエラーなしで実行できるのは、
cluster-adminユーザーのみです。$ oc get all -n openshift-apiserver
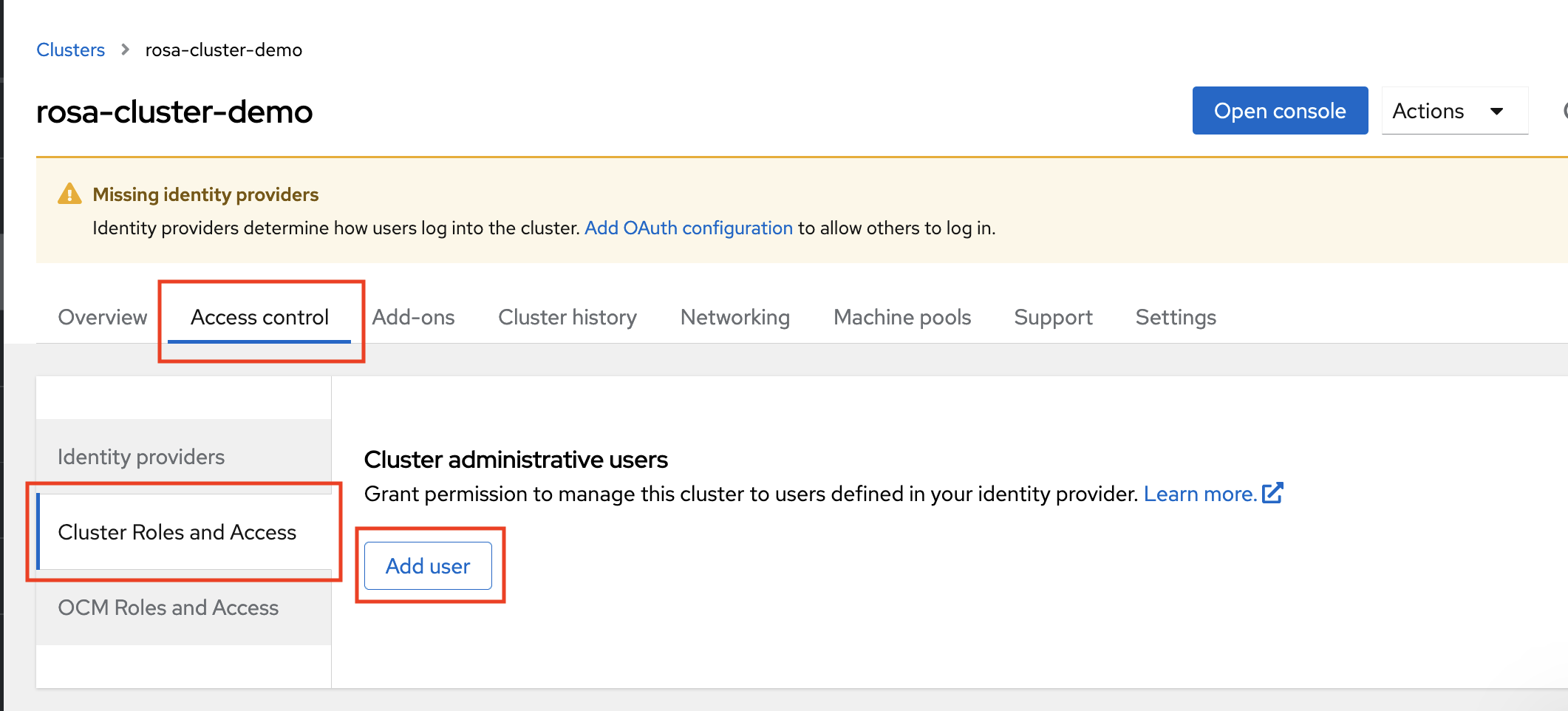
1.4.2. Red Hat OpenShift Cluster Manager UI の使用
- OpenShift Cluster Manager にログインします。
- クラスターを選択します。
- Access Control タブをクリックします。
- サイドバーの Cluster roles and Access タブをクリックします。
Add user をクリックします。
- ポップアップ画面でユーザー ID を入力します。
ユーザーに
cluster-admins権限を付与するか、dedicated-admins権限を付与するかを選択します。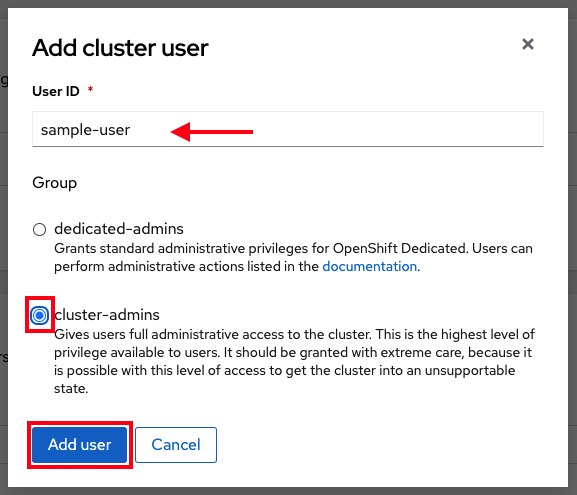
1.5. クラスターへのアクセス
ROSA コマンドラインインターフェイス (CLI) (rosa) または Red Hat Hybrid Cloud Console ユーザーインターフェイス (UI) を使用してクラスターに接続できます。
1.5.1. CLI を使用したクラスターへのアクセス
CLI を使用してクラスターにアクセスするには、oc CLI がインストールされている必要があります。チュートリアルの手順を実行してきた場合は、oc CLI がすでにインストールされています。
- OpenShift Cluster Manager にログインします。
- 右上隅にあるユーザー名をクリックします。
Copy Login Command をクリックします。

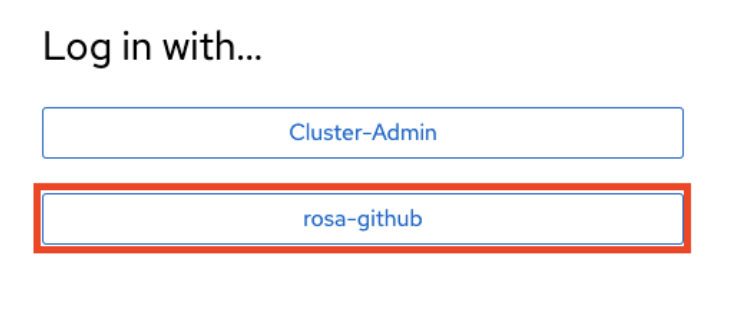
アイデンティティープロバイダー (IDP) を選択できる新しいタブが開きます。使用する IDP をクリックします。たとえば、"rosa-github" です。
- 新しいタブが開きます。Display token をクリックします。
ターミナルで次のコマンドを実行します。
$ oc login --token=sha256~GBAfS4JQ0t1UTKYHbWAK6OUWGUkdMGz000000000000 --server=https://api.my-rosa-cluster.abcd.p1.openshiftapps.com:6443出力例
Logged into "https://api.my-rosa-cluster.abcd.p1.openshiftapps.com:6443" as "rosa-user" using the token provided. You have access to 79 projects, the list has been suppressed. You can list all projects with ' projects' Using project "default".次のコマンドを実行して、ログインしていることを確認します。
$ oc whoami出力例
rosa-user- これで、クラスターにアクセスできます。
1.5.2. Hybrid Cloud Console を使用したクラスターへのアクセス
- OpenShift Cluster Manager にログインします。
Hybrid Cloud Console URL を取得するには、次のコマンドを実行します。
$ rosa describe cluster -c <cluster-name> | grep ConsoleIDP をクリックします。たとえば、"rosa-github" です。
- ユーザー認証情報を入力します。
ログインが完了します。チュートリアルの手順を実行してきた場合は、cluster-admin となり、Administrator パネルがある Hybrid Cloud Console の Web ページが表示されるはずです。
1.6. ワーカーノードの管理
Red Hat OpenShift Service on AWS では、ワーカーノードの変更はマシンプールを使用して実行します。マシンプールを使用すると、ユーザーは多数のマシンを 1 つのエンティティーとして管理できます。すべての Red Hat OpenShift Service on AWS クラスターには、クラスターの作成時に作成されるデフォルトのマシンプールがあります。ROSA コマンドラインインターフェイス (CLI) (rosa) または OpenShift Cluster Manager 内でマシンプールを作成できます。
1.6.1. ROSA CLI でマシンプールを作成する
ROSA CLI を使用してマシンプールを作成できます。
手順
以下のコマンドを実行します。
$ rosa create machinepool --cluster=<cluster-name> --name=<machinepool-name> --replicas=<number-nodes>入力の例
$ rosa create machinepool --cluster=my-rosa-cluster --name=new-mp --replicas=2出力例
I: Machine pool 'new-mp' created successfully on cluster 'my-rosa-cluster' I: To view all machine pools, run 'rosa list machinepools -c my-rosa-cluster'オプション: 次のコマンドを実行して、新しいマシンプール内の特定のノードにノードラベルまたはテイントを追加します。
$ rosa create machinepool --cluster=<cluster-name> --name=<machinepool-name> --replicas=<number-nodes> --labels=`<key=pair>`入力の例
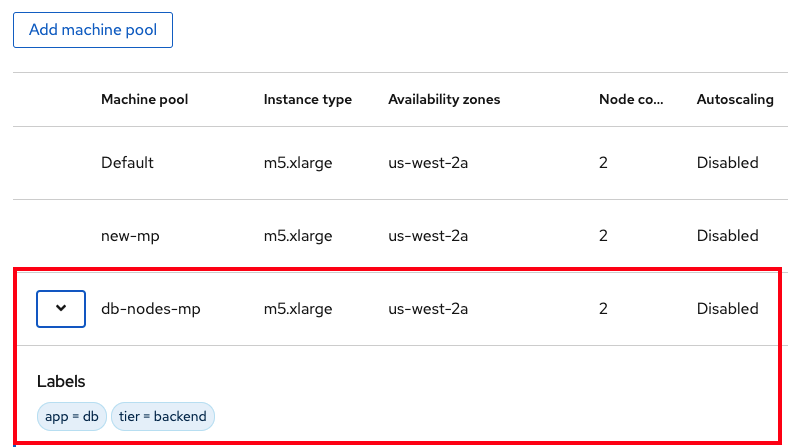
$ rosa create machinepool --cluster=my-rosa-cluster --name=db-nodes-mp --replicas=2 --labels='app=db','tier=backend'出力例
I: Machine pool 'db-nodes-mp' created successfully on cluster 'my-rosa-cluster'これにより、1 つのユニットとして管理できる追加の 2 つのノードが作成されます。また、表示されるラベルがこのノードに割り当てられます。
次のコマンドを実行して、マシンプールの作成と割り当てられたラベルを確認します。
$ rosa list machinepools --cluster=<cluster-name>出力例
ID AUTOSCALING REPLICAS INSTANCE TYPE LABELS TAINTS AVAILABILITY ZONE SUBNET DISK SIZE VERSION AUTOREPAIR workers Yes 2/2-4 m5.xlarge us-east-1f subnet-<subnet_id> 300 GiB 4.14.36 Yes
1.6.2. UI を使用したマシンプールの作成
OpenShift Cluster Manager を使用してマシンプールを作成できます。
手順
OpenShift Cluster Manager にログインし、クラスターをクリックします。

Machine pools タブをクリックします。

- Add machine pool をクリックします。
必要な設定を入力します。
ヒントまた、Edit node labels and taints セクションを展開して、ノードラベルとテイントをマシンプール内のノードに追加することもできます。
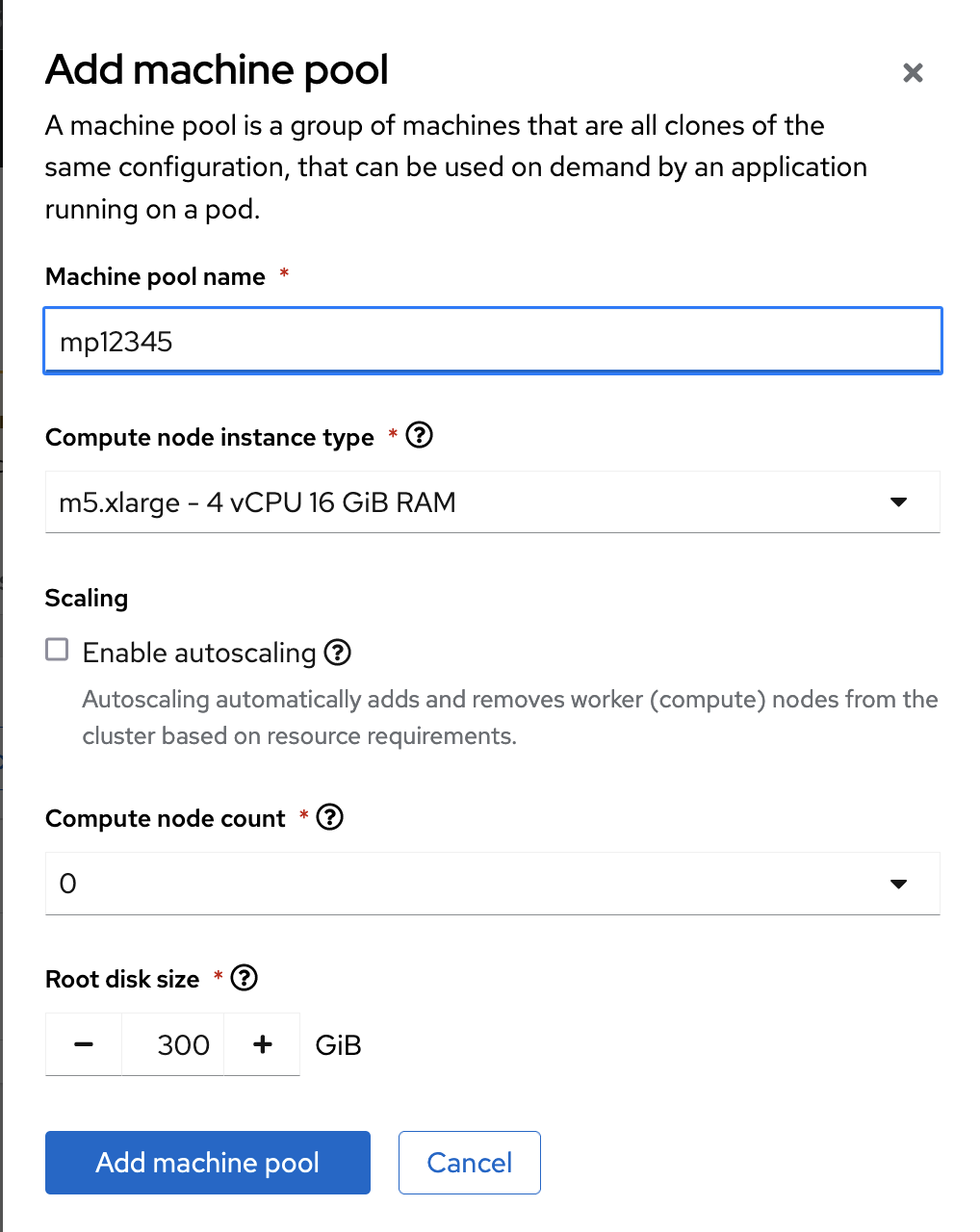
- Add machine pool ボタンをクリックして保存します。
作成した新しいマシンプールが表示されます。
1.6.3. CLI を使用したワーカーノードのスケーリング
ROSA CLI を使用してマシンプールを編集し、その特定のマシンプール内のワーカーノードの数をスケーリングします。
手順
次のコマンドを実行して、各クラスターで作成されたデフォルトのマシンプールを確認します。
$ rosa list machinepools --cluster=<cluster-name>出力例
ID AUTOSCALING REPLICAS INSTANCE TYPE LABELS TAINTS AVAILABILITY ZONES Default No 2 m5.xlarge us-east-1aデフォルトのマシンプールを異なるノード数にスケールアウトするには、次のコマンドを実行します。
$ rosa edit machinepool --cluster=<cluster-name> --replicas=<number-nodes> <machinepool-name>入力の例
$ rosa edit machinepool --cluster=my-rosa-cluster --replicas 3 Default次のコマンドを実行して、マシンプールがスケーリングされたことを確認します。
$ rosa describe cluster --cluster=<cluster-name> | grep Compute入力の例
$ rosa describe cluster --cluster=my-rosa-cluster | grep Compute出力例
- Compute (Autoscaled): 2-4 - Compute (current): 2
1.6.4. UI を使用したワーカーノードのスケーリング
OpenShift Cluster Manager を使用してマシンプールを編集し、その特定のマシンプール内のワーカーノード数をスケーリングします。
手順
- 編集するマシンプールの右側にある 3 つの点をクリックします。
- Edit をクリックします。
- 必要なノード数を入力し、Save をクリックします。
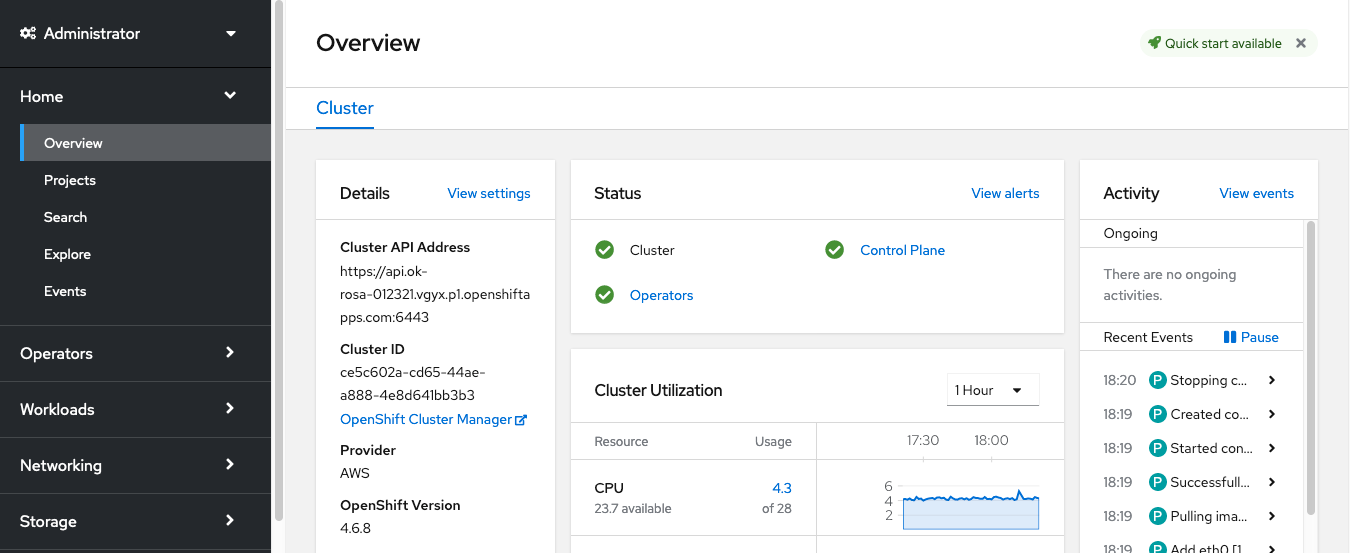
クラスターを選択し、Overview タブをクリックします。Compute listing までスクロールして、クラスターがスケーリングされたことを確認します。Compute listing はスケーリングされたノードと同じであるはずです。たとえば、3/3 のようになります。

1.6.4.1. ノードラベルの追加
次のコマンドを使用してノードラベルを追加します。
$ rosa edit machinepool --cluster=<cluster-name> --replicas=<number-nodes> --labels='key=value' <machinepool-name>入力の例
$ rosa edit machinepool --cluster=my-rosa-cluster --replicas=2 --labels 'foo=bar','baz=one' new-mpこれにより、新しいマシンプールに 2 つのラベルが追加されます。
このコマンドは、すべてのマシンプール設定を新しく定義した設定に置き換えます。別のラベルを追加し、かつ 古いラベルを保持する場合は、新しいラベルと既存のラベルの両方を指定する必要があります。指定しないと、既存のすべてのラベルが追加するラベルに置き換えられます。同様に、ラベルを削除する場合は、削除するラベルを除いて必要なラベルを指定し、コマンドを実行します。
1.6.5. ノードタイプの混在
新しいマシンプールを使用して、同じクラスター内で異なるワーカーノードマシンタイプを混在させることもできます。マシンプールの作成後にマシンプールのノードタイプを変更することはできません。しかし、--instance-type フラグを追加することで、異なるノードを持つ新しいマシンプールを作成できます。
たとえば、データベースノードを別のノードタイプに変更するには、次のコマンドを実行します。
$ rosa create machinepool --cluster=<cluster-name> --name=<mp-name> --replicas=<number-nodes> --labels='<key=pair>' --instance-type=<type>入力の例
$ rosa create machinepool --cluster=my-rosa-cluster --name=db-nodes-large-mp --replicas=2 --labels='app=db','tier=backend' --instance-type=m5.2xlarge利用可能なすべてのインスタンスタイプ を表示するには、次のコマンドを実行します。
$ rosa list instance-typesステップバイステップで変更するには、
--interactiveフラグを使用します。$ rosa create machinepool -c <cluster-name> --interactive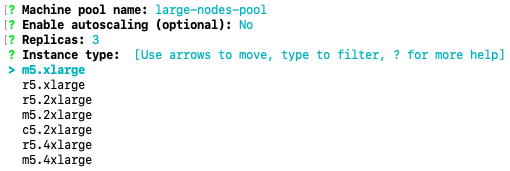
次のコマンドを実行してマシンプールをリストし、より大きな新しいインスタンスタイプを確認します。
$ rosa list machinepools -c <cluster-name>
1.7. 自動スケーリング
クラスターオートスケーラー は、Pod リソースに基づいてクラスターにワーカーノードを追加または削除します。
クラスターオートスケーラーは、次の場合にクラスターのサイズを増やします。
- リソースが不足しているため、Pod を現在のノードでスケジュールできない場合。
- デプロイメントのニーズを満たすために、別のノードが必要な場合。
クラスターオートスケーラーは、指定の制限を超えてクラスターリソースを拡大することはありません。
クラスターオートスケーラーは、次の場合にクラスターのサイズを減らします。
- 一部のノードが長期間続けて必要とされない場合。たとえば、ノードのリソース使用量が低く、そのノードの重要な Pod がすべて他のノードに収まる場合です。
1.7.1. CLI を使用した既存マシンプールの自動スケーリングの有効化
クラスターの自動スケーリングは、クラスターの作成時、および新しいマシンプールを作成するときに、--enable-autoscaling オプションを使用して有効にできます。
自動スケーリングは、マシンプールの可用性に基づいて設定されます。どのマシンプールが自動スケーリングに使用できるかを確認するには、次のコマンドを実行します。
$ rosa list machinepools -c <cluster-name>出力例
ID AUTOSCALING REPLICAS INSTANCE TYPE LABELS TAINTS AVAILABILITY ZONE SUBNET DISK SIZE VERSION AUTOREPAIR workers No 2/2 m5.xlarge us-east-1f subnet-<subnet_id> 300 GiB 4.14.36 Yes次のコマンドを実行して、利用可能なマシンプールに自動スケーリングを追加します。
$ rosa edit machinepool -c <cluster-name> --enable-autoscaling <machinepool-name> --min-replicas=<num> --max-replicas=<num>入力の例
$ rosa edit machinepool -c my-rosa-cluster --enable-autoscaling workers --min-replicas=2 --max-replicas=4上記のコマンドは、リソースに応じて 2 - 4 ノードの間でスケーリングするワーカーノードのオートスケーラーを作成します。
1.7.2. UI を使用した既存マシンプールの自動スケーリングの有効化
マシンプールの作成時に Enable autoscaling チェックボックスをオンにすることで、クラスターの作成時にクラスターの自動スケーリングを有効にできます。
- Machine pools タブに移動し、右側の 3 つの点をクリックします。
- Edit をクリックし、Enable autoscaling をクリックします。
- 最小ノード数と最大ノード数を編集するか、デフォルトの数値のままにします。
- Save をクリックします。
次のコマンドを実行して、自動スケーリングが追加されたことを確認します。
$ rosa list machinepools -c <cluster-name>出力例
ID AUTOSCALING REPLICAS INSTANCE TYPE LABELS TAINTS AVAILABILITY ZONE SUBNET DISK SIZE VERSION AUTOREPAIR workers Yes 2/2-4 m5.xlarge us-east-1f subnet-<subnet_id> 300 GiB 4.14.36 Yes
1.8. クラスターのアップグレード
Red Hat OpenShift Service on AWS では、クラスターのアップグレードはすべてマネージドサービスの一環として実行されます。ユーザーがコマンドを実行したり、クラスターに変更を加えたりする必要はありません。アップグレードは都合の良い時刻にスケジュールできます。
クラスターのアップグレードをスケジュールする方法には、次のものがあります。
- コマンドラインインターフェイス (CLI) を使用した手動アップグレード: 1 回限りの即時アップグレードを開始するか、将来の日時に 1 回限りのアップグレードをスケジュールします。
- Red Hat OpenShift Cluster Manager ユーザーインターフェイス (UI) を使用した手動アップグレード: 1 回限りの即時アップグレードを開始するか、将来の日時に 1 回限りのアップグレードをスケジュールします。
- 自動アップグレード: 手動でスケジュールを設定することなく、新しいバージョンが利用可能になるたびに、定期的な y-stream アップグレードのアップグレード時間を設定します。マイナーバージョンは手動でスケジュールする必要があります。
クラスターのアップグレードの詳細は、次のコマンドを実行してください。
$ rosa upgrade cluster --help1.8.1. CLI を使用したクラスターの手動アップグレード
ROSA CLI を使用してクラスターをアップグレードできます。
手順
次のコマンドを実行して、利用可能なアップグレードがあるかどうかを確認します。
$ rosa list upgrade -c <cluster-name>出力例
$ rosa list upgrade -c <cluster-name> VERSION NOTES 4.14.7 recommended 4.14.6 ...上の例では、バージョン 4.14.7 と 4.14.6 の両方が利用可能です。
次のコマンドを実行して、1 時間以内にクラスターをアップグレードするようにスケジュールします。
$ rosa upgrade cluster -c --control-plane <cluster-name> --version <desired-version>オプション: 次のコマンドを実行して、将来の日時にクラスターをアップグレードするようにスケジュールします。
$ rosa upgrade cluster -c <cluster-name> --version <desired-version> --schedule-date <future-date-for-update> --schedule-time <future-time-for-update>
1.8.2. UI を使用したクラスターの手動アップグレード
OpenShift Cluster Manager を使用してクラスターをアップグレードできます。
- OpenShift Cluster Manager にログインし、アップグレードするクラスターを選択します。
- Settings タブをクリックします。
アップグレードが利用可能な場合は、Update をクリックします。

- 新しいウィンドウでアップグレードするバージョンを選択します。
- アップグレードの時間をスケジュールするか、すぐに開始します。
1.8.3. 自動定期アップグレードの設定
- OpenShift Cluster Manager にログインし、アップグレードするクラスターを選択します。
- Settings タブをクリックします。
- Update Strategy で、Recurring updates をクリックします。
- アップグレードを実行する日時を設定します。
- Save をクリックします。
1.9. クラスターの削除
Red Hat OpenShift Service on AWS クラスターは、ROSA コマンドラインインターフェイス (CLI) (rosa) またはユーザーインターフェイス (UI) を使用して削除できます。
1.9.1. CLI を使用した Red Hat OpenShift Service on AWS クラスターの削除
オプション: 次のコマンドを実行して、クラスターをリストし、削除する正しいクラスターを確認します。
$ rosa list clusters次のコマンドを実行してクラスターを削除します。
$ rosa delete cluster --cluster <cluster-name>警告このコマンドは元に戻せません。
CLI に、クラスターを削除するかどうかを確認するプロンプトが表示されます。y を押してから Enter を押します。クラスターとそれに関連するすべてのインフラストラクチャーが削除されます。
注記AWS STS および IAM のロールとポリシーはすべての残るため、クラスターの削除が完了したら、以下の手順に従って手動で削除する必要があります。
CLI に、作成した OpenID Connect (OIDC) プロバイダーおよび Operator IAM ロールのリソースを削除するコマンドが出力します。クラスターの削除が完了するまで待ってから、これらのリソースを削除します。次のコマンドを実行して、簡単なステータスチェックを実行します。
$ rosa list clustersクラスターが削除されたら、次のコマンドを実行して OIDC プロバイダーを削除します。
$ rosa delete oidc-provider -c <clusterID> --mode auto --yes次のコマンドを実行して、Operator IAM ロールを削除します。
$ rosa delete operator-roles -c <clusterID> --mode auto --yes注記このコマンドには、クラスター名ではなくクラスター ID が必要です。
残りのアカウントロールは、同じアカウント内の他のクラスターで必要なくなった場合にのみ削除してください。このアカウントで他の ROSA クラスターを作成する場合は、この手順を実行しないでください。
アカウントロールを削除するには、アカウントロールの作成時に使用した接頭辞を確認する必要があります。特に指定しなかった場合、デフォルトは "ManagedOpenShift" です。
次のコマンドを実行して、アカウントのロールを削除します。
$ rosa delete account-roles --prefix <prefix> --mode auto --yes
1.9.2. UI を使用した Red Hat OpenShift Service on AWS クラスターの削除
- OpenShift Cluster Manager にログインし、削除するクラスターを見つけます。
クラスターの右側にある 3 つの点をクリックします。
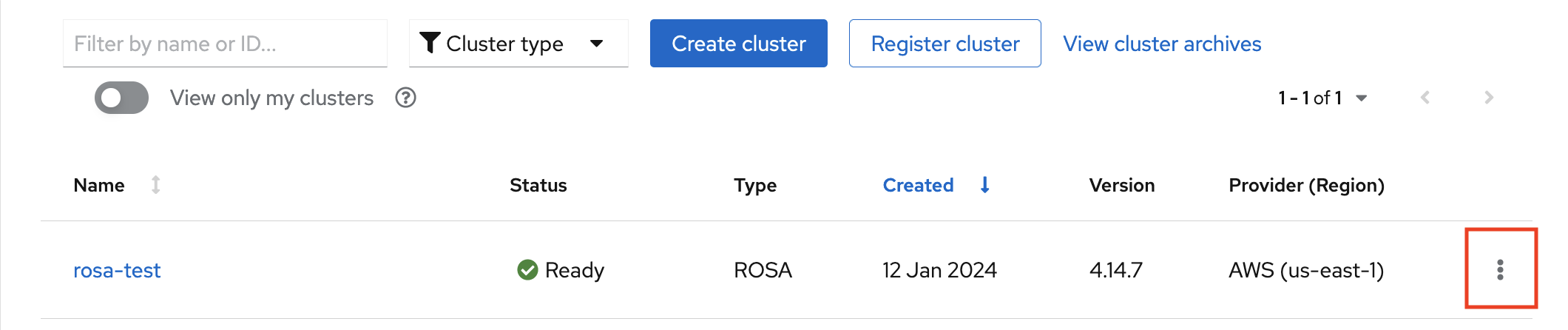
ドロップダウンメニューで、Delete cluster をクリックします。

- 削除を確認するクラスターの名前を入力し、Delete をクリックします。
1.10. サポートの利用
必要なときに適切なサポートを受けることが重要です。ここでは、サポートが必要な場合に利用できるリソースをいくつか紹介します。
1.10.1. サポート連絡先の追加
クラスターに関する連絡用のメールアドレスを追加できます。
- Red Hat OpenShift Cluster Manager ユーザーインターフェイス (UI) で、サイドナビゲーションタブの Cluster List をクリックします。
- サポートが必要なクラスターを選択します。
- Support タブをクリックします。
- Add notification contact をクリックし、追加のメールアドレスを入力します。
1.10.2. UI を使用して Red Hat にサポートについて問い合わせる
OpenShift Cluster Manager 内でサポートをリクエストできます。
手順
- OpenShift Cluster Manager UI で、Support タブをクリックします。
- Open support case をクリックします。
1.10.3. サポートページを使用して Red Hat にサポートについて問い合わせる
サポートページを使用して Red Hat サポートをリクエストできます。
- Red Hat サポートページ に移動します。
Open a new Case をクリックします。

- Red Hat アカウントにログインします。
サポートに問い合わせる理由を選択します。

Red Hat OpenShift Service on AWS を選択します。

- continue をクリックします。
問題の概要とリクエストの詳細を入力します。ファイル、ログ、スクリーンショットをアップロードします。ご提供いただく情報が多いほど、Red Hat サポートが適切な解決方法を見つけやすくなります。
注記このページの下部に、問題の解決に役立つ関連性の高い提案が表示されます。

- Continue をクリックします。
- 新しいフィールドの質問に回答します。
- Continue をクリックします。
ケースに関する次の情報を入力します。
- Support level: Premium
- Severity: Red Hat サポートの重大度レベルの定義を確認して、正しいものを選択します。
- Group: このケースが他のいくつかのケースに関連する場合は、対応するグループを選択できます。
- Language
- Send notifications: アクティビティーの通知を受け取るためのメールアドレスを追加します。
- Red Hat associates: Red Hat の従業員とやり取りをしていて、その従業員と情報を共有する場合は、ここに従業員のメールアドレスを入力できます。
- Alternate Case ID: お客様独自の ID を割り当てる場合は、ここに入力できます。
- Continue をクリックします。
確認画面で、問い合わせに関連する正しいクラスター ID を選択していることを確認します。

- Submit をクリックします。
- 指定した重大度レベル の約束された応答時間に応じて連絡が届きます。
第2章 アプリケーションのデプロイのワークショップ
2.1. ワークショップの概要
クラスターのプロビジョニングが正常に完了したら、コンテナーベースのアプリケーションのデプロイと操作の概念を理解するために、このワークショップに従ってクラスターにアプリケーションをデプロイしてください。
2.1.1. ワークショップの目的
以下に、このクラスター作成ワークショップの目的を詳しく説明します。
- Source-to-Image (S2I) と Kubernetes デプロイメントオブジェクトを使用して Node.js ベースのアプリケーションをデプロイする
- ソースコードの変更を自動的にプッシュするための継続的デリバリー (CD) パイプラインをセットアップする
- アプリケーションの自己修復を試す
- ConfigMap、シークレット、環境変数による設定管理について学ぶ
- 永続ストレージを使用して Pod の再起動後もデータを保持する
- Kubernetes とアプリケーションのネットワークを確認する
- Red Hat OpenShift Service on AWS と Kubernetes の機能に関する理解を深める
- Horizontal Pod Autoscaler (HPA) により、負荷に基づいて Pod を自動的にスケーリングする
2.1.1.1. 前提条件
- プロビジョニングされた Red Hat OpenShift Service on AWS クラスター
- OpenShift コマンドラインインターフェイス (CLI)
- GitHub アカウント
2.1.2. OSToy アプリケーションについて
OSToy は、Kubernetes の機能を調査するために Red Hat OpenShift Service on AWS クラスターにデプロイされる Node.js アプリケーションです。
このアプリケーションのユーザーインターフェイスから、以下を実行できます。
- メッセージをログ (stdout/stderr) に書き込む
- 自己修復を確認するために意図的にアプリケーションをクラッシュさせる
- liveness プローブを切り替えて OpenShift の動作を監視する
- ConfigMap、シークレット、環境変数を読み取る
- 共有ストレージに接続されている場合にファイルを読み書きする
- ネットワーク接続、クラスター内 DNS、および含まれるマイクロサービスとの内部通信を確認する
- HPA を使用した Pod の自動スケーリングを確認するために負荷を増やす
2.1.2.1. OSToy の UI について

- Pod の名前
- Home: アプリケーションのホームページ
- Persistent Storage: アプリケーションにバインドされた永続ボリュームにデータを書き込む
- Config Maps: アプリケーションで利用可能な ConfigMap と、キーと値のペアを表示する
- Secrets: アプリケーションで利用可能なシークレットと、キーと値のペアを表示する
- ENV Variables: アプリケーションで利用可能な環境変数を表示する
- Networking: ネットワークツール
- Pod Auto Scaling: Pod の負荷を増やし、Horizontal Pod Autoscaler (HPA) をテストする
- ACK S3: AWS S3 と統合してバケットへのオブジェクトの読み書きを行う
- About: アプリケーション情報
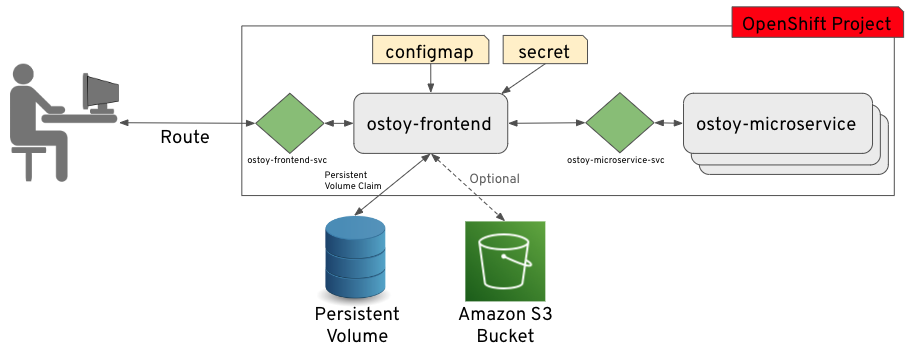
2.1.2.2. ラボのリソース
- OSToy アプリケーションのソースコード
- OSToy フロントエンドコンテナーイメージ
- OSToy マイクロサービスコンテナーイメージ
デプロイメント定義 YAML ファイル:
ostoy-frontend-deployment.yamlapiVersion: v1 kind: PersistentVolumeClaim metadata: name: ostoy-pvc spec: accessModes: - ReadWriteOnce resources: requests: storage: 1Gi --- apiVersion: apps/v1 kind: Deployment metadata: name: ostoy-frontend labels: app: ostoy spec: selector: matchLabels: app: ostoy-frontend strategy: type: Recreate replicas: 1 template: metadata: labels: app: ostoy-frontend spec: # Uncomment to use with ACK portion of the workshop # If you chose a different service account name please replace it. # serviceAccount: ostoy-sa containers: - name: ostoy-frontend securityContext: allowPrivilegeEscalation: false runAsNonRoot: true seccompProfile: type: RuntimeDefault capabilities: drop: - ALL image: quay.io/ostoylab/ostoy-frontend:1.6.0 imagePullPolicy: IfNotPresent ports: - name: ostoy-port containerPort: 8080 resources: requests: memory: "256Mi" cpu: "100m" limits: memory: "512Mi" cpu: "200m" volumeMounts: - name: configvol mountPath: /var/config - name: secretvol mountPath: /var/secret - name: datavol mountPath: /var/demo_files livenessProbe: httpGet: path: /health port: 8080 initialDelaySeconds: 10 periodSeconds: 5 env: - name: ENV_TOY_SECRET valueFrom: secretKeyRef: name: ostoy-secret-env key: ENV_TOY_SECRET - name: MICROSERVICE_NAME value: OSTOY_MICROSERVICE_SVC - name: NAMESPACE valueFrom: fieldRef: fieldPath: metadata.namespace volumes: - name: configvol configMap: name: ostoy-configmap-files - name: secretvol secret: defaultMode: 420 secretName: ostoy-secret - name: datavol persistentVolumeClaim: claimName: ostoy-pvc --- apiVersion: v1 kind: Service metadata: name: ostoy-frontend-svc labels: app: ostoy-frontend spec: type: ClusterIP ports: - port: 8080 targetPort: ostoy-port protocol: TCP name: ostoy selector: app: ostoy-frontend --- apiVersion: route.openshift.io/v1 kind: Route metadata: name: ostoy-route spec: to: kind: Service name: ostoy-frontend-svc --- apiVersion: v1 kind: Secret metadata: name: ostoy-secret-env type: Opaque data: ENV_TOY_SECRET: VGhpcyBpcyBhIHRlc3Q= --- kind: ConfigMap apiVersion: v1 metadata: name: ostoy-configmap-files data: config.json: '{ "default": "123" }' --- apiVersion: v1 kind: Secret metadata: name: ostoy-secret data: secret.txt: VVNFUk5BTUU9bXlfdXNlcgpQQVNTV09SRD1AT3RCbCVYQXAhIzYzMlk1RndDQE1UUWsKU01UUD1sb2NhbGhvc3QKU01UUF9QT1JUPTI1 type: Opaqueostoy-microservice-deployment.yamlapiVersion: apps/v1 kind: Deployment metadata: name: ostoy-microservice labels: app: ostoy spec: selector: matchLabels: app: ostoy-microservice replicas: 1 template: metadata: labels: app: ostoy-microservice spec: containers: - name: ostoy-microservice securityContext: allowPrivilegeEscalation: false runAsNonRoot: true seccompProfile: type: RuntimeDefault capabilities: drop: - ALL image: quay.io/ostoylab/ostoy-microservice:1.5.0 imagePullPolicy: IfNotPresent ports: - containerPort: 8080 protocol: TCP resources: requests: memory: "128Mi" cpu: "50m" limits: memory: "256Mi" cpu: "100m" --- apiVersion: v1 kind: Service metadata: name: ostoy-microservice-svc labels: app: ostoy-microservice spec: type: ClusterIP ports: - port: 8080 targetPort: 8080 protocol: TCP selector: app: ostoy-microserviceACK S3 の S3 バケットマニフェスト
s3-bucket.yamlapiVersion: s3.services.k8s.aws/v1alpha1 kind: Bucket metadata: name: ostoy-bucket namespace: ostoy spec: name: ostoy-bucket
OSToy アプリケーションのデプロイを簡略化するために、上記のデプロイメントマニフェストで必要なすべてのオブジェクトはグループ化されています。一般的なエンタープライズデプロイメントでは、Kubernetes オブジェクトごとに個別のマニフェストファイルを使用することを推奨します。
2.2. Kubernetes を使用した OSToy アプリケーションのデプロイ
アプリケーションをデプロイするには、コンテナーイメージを作成し、それをイメージリポジトリーに保存して、そのイメージを使用する Deployment オブジェクトを定義する必要があります。
アプリケーションのデプロイには次の手順が必要です。
- フロントエンドとバックエンドのマイクロサービスコンテナーのイメージを作成する
- コンテナーイメージをイメージリポジトリーに保存する
- アプリケーションの Kubernetes Deployment オブジェクトを作成する
- アプリケーションのデプロイ
このワークショップでは、アプリケーションのデプロイに焦点を当てており、既存のイメージを使用するリモートファイルを実行していただきます。
2.2.1. ログインコマンドの取得
手順
次のコマンドを実行して、ROSA コマンドラインインターフェイス (CLI) (
rosa) にログインしていることを確認します。rosa whoamiコマンドラインインターフェイスにログインしている場合は、「新しいプロジェクトの作成」に進んでください。コマンドラインインターフェイスにログインしていない場合は、この手順を続行します。
- Web コンソールを使用してクラスターにアクセスします。
右上隅のログイン名の横にあるドロップダウン矢印をクリックし、Copy Login Command を選択します。
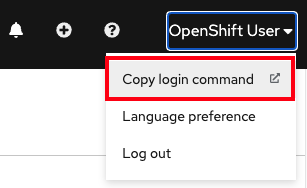
新しいタブが開きます。
- 認証方法を選択します。
- Display Token をクリックします。
- Log in with this token の下のコマンドをコピーします。
ターミナルから、コピーしたコマンドを貼り付けて実行します。ログインに成功すると、次の確認メッセージが表示されます。
$ oc login --token=<your_token> --server=https://api.osd4-demo.abc1.p1.openshiftapps.com:6443 Logged into "https://api.myrosacluster.abcd.p1.openshiftapps.com:6443" as "rosa-user" using the token provided. You don't have any projects. You can try to create a new project, by running oc new-project <project name>
2.2.2. CLI を使用した新しいプロジェクトの作成
OpenShift CLI (oc) を使用して新しいプロジェクトを作成できます。
手順
以下のコマンドを実行して、クラスターに
ostoyという名前の新規プロジェクトを作成します。$ oc new-project ostoy出力例
Now using project "ostoy" on server "https://api.myrosacluster.abcd.p1.openshiftapps.com:6443".オプション: 次のコマンドを実行して、一意のプロジェクト名を作成します。
$ oc new-project ostoy-$(uuidgen | cut -d - -f 2 | tr '[:upper:]' '[:lower:]')
2.2.3. Web コンソールを使用した新しいプロジェクトの作成
OpenShift Cluster Manager を使用して新しいプロジェクトを作成できます。
手順
- Web コンソールから、Home → Projects をクリックします。
Projects ページで Create Project をクリックします。
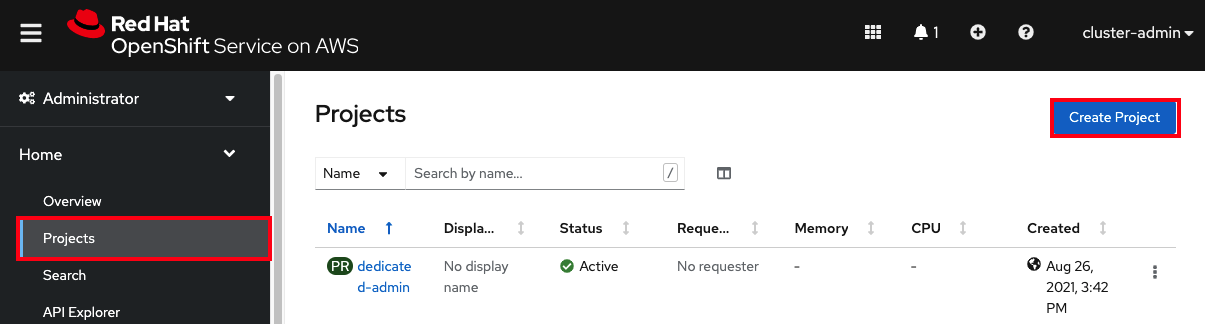
- Create Project ボックスで、Name フィールドにプロジェクト名を入力します。
- Create をクリックします。
2.2.4. バックエンドマイクロサービスのデプロイ
マイクロサービスは内部 Web リクエストを処理し、現在のホスト名とランダムに生成された色の文字列を含む JSON オブジェクトを返します。
手順
次のコマンドを実行してマイクロサービスをデプロイします。
$ oc apply -f https://raw.githubusercontent.com/openshift-cs/rosaworkshop/master/rosa-workshop/ostoy/yaml/ostoy-microservice-deployment.yaml出力例
$ oc apply -f https://raw.githubusercontent.com/openshift-cs/rosaworkshop/master/rosa-workshop/ostoy/yaml/ostoy-microservice-deployment.yaml deployment.apps/ostoy-microservice created service/ostoy-microservice-svc created
2.2.5. フロントエンドマイクロサービスのデプロイ
フロントエンドデプロイメントでは、アプリケーションと追加の Kubernetes オブジェクトに Node.js フロントエンドを使用します。
フロントエンドデプロイメントでは、次の機能を定義します。
- 永続ボリューム要求
- Deployment オブジェクト
- サービス
- ルート
- ConfigMap
- シークレット
手順
次のコマンドを実行して、アプリケーションのフロントエンドをデプロイし、オブジェクトを作成します。
$ oc apply -f https://raw.githubusercontent.com/openshift-cs/rosaworkshop/master/rosa-workshop/ostoy/yaml/ostoy-frontend-deployment.yaml出力例
persistentvolumeclaim/ostoy-pvc created deployment.apps/ostoy-frontend created service/ostoy-frontend-svc created route.route.openshift.io/ostoy-route created configmap/ostoy-configmap-env created secret/ostoy-secret-env created configmap/ostoy-configmap-files created secret/ostoy-secret createdすべてのオブジェクトが正常に作成されるはずです。
2.2.6. アプリケーションへのルートの取得
アプリケーションにアクセスするためのルートを取得します。
手順
次のコマンドを実行して、アプリケーションへのルートを取得します。
$ oc get route出力例
NAME HOST/PORT PATH SERVICES PORT TERMINATION WILDCARD ostoy-route ostoy-route-ostoy.apps.<your-rosa-cluster>.abcd.p1.openshiftapps.com ostoy-frontend-svc <all> None
2.2.7. アプリケーションの表示
手順
-
前の手順で出力された
ostoy-route-ostoy.apps.<your-rosa-cluster>.abcd.p1.openshiftapps.comURL をコピーします。 コピーした URL を Web ブラウザーに貼り付けて Enter キーを押します。アプリケーションのホームページが表示されます。ページが読み込まれない場合は、
httpsではなくhttpを使用していることを確認してください。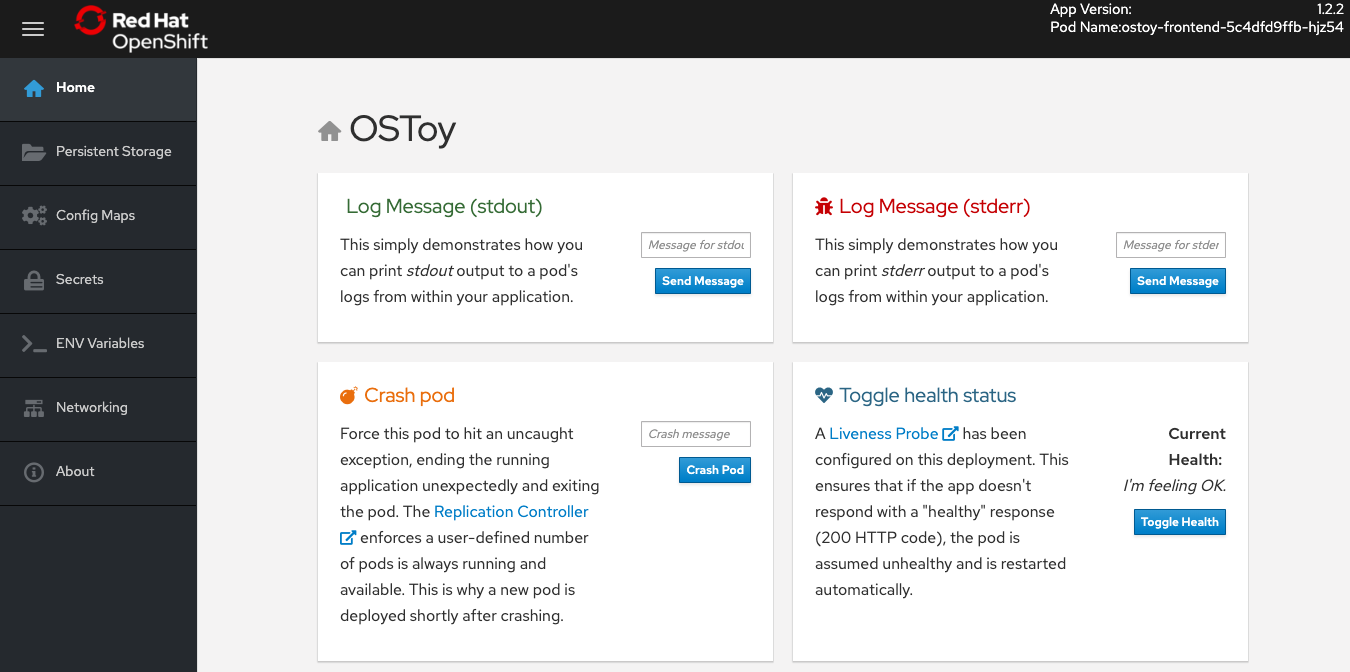
2.3. ヘルスチェック
意図的に Pod をクラッシュさせ、Kubernetes liveness プローブに応答しないようにすることで、Kubernetes が Pod の障害にどのように対応するかを確認します。
2.3.1. デスクトップの準備
手順
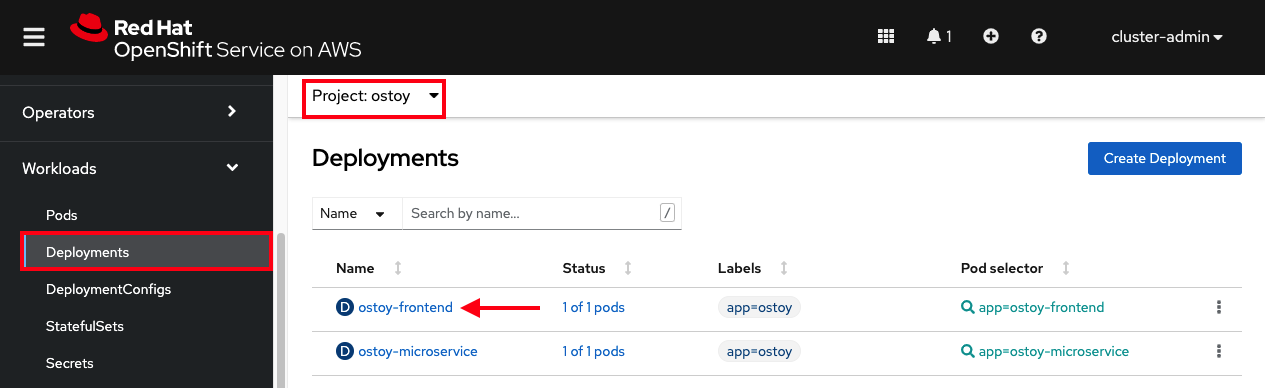
OpenShift Web コンソールから、Workloads > Deployments > ostoy-frontend を選択して、OSToy デプロイメントを表示します。
2.3.2. Pod のクラッシュ
手順
-
OSToy アプリケーションの Web コンソールから、左側のメニューの Home をクリックし、Crash Pod ボックスに
This is goodbye!などのメッセージを入力します。 Crash Pod をクリックします。

Pod がクラッシュし、Kubernetes が Pod を再起動します。

2.3.3. 復活した Pod の確認
手順
OpenShift Web コンソールから、Deployments 画面にすばやく切り替えます。Pod が黄色に変わり、ダウンしていることがわかります。すぐに復活して青色に変わるはずです。復活のプロセスは即座に実行されます。
検証
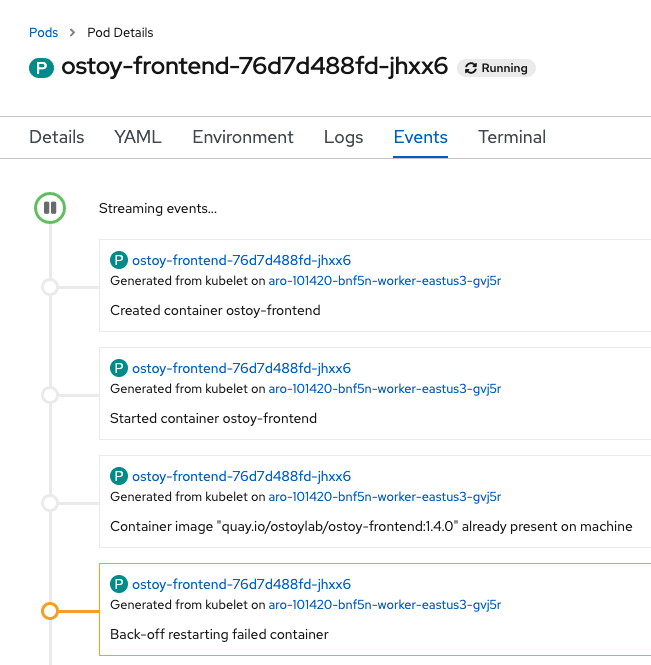
Web コンソールから、Pods > ostoy-frontend-xxxxxxx-xxxx をクリックして、Pod 画面に切り替えます。

Events サブタブをクリックし、コンテナーがクラッシュして再起動したことを確認します。
2.3.4. アプリケーションを誤動作させる
手順
OSToy アプリケーションから、Toggle Health Status タイルの Toggle Health をクリックします。Current Health 状態が I’m not feeling all that well に切り替わるのを確認します。
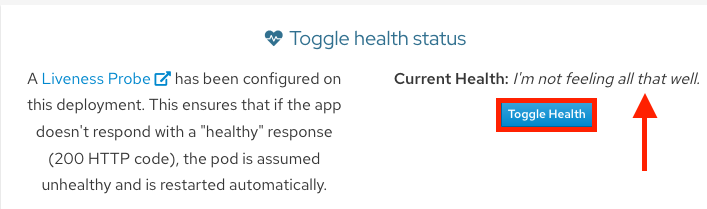
検証
アプリケーションを誤動作させると、そのアプリケーションは 200 HTTP code で応答しなくなります。3 回連続して失敗すると、Kubernetes が Pod を停止して再起動します。
- Web コンソールから Pod イベントページに戻り、liveness プローブが失敗し、Pod が再起動したことを確認します。
次の画像は、Pod イベントページに表示される内容の例を示しています。
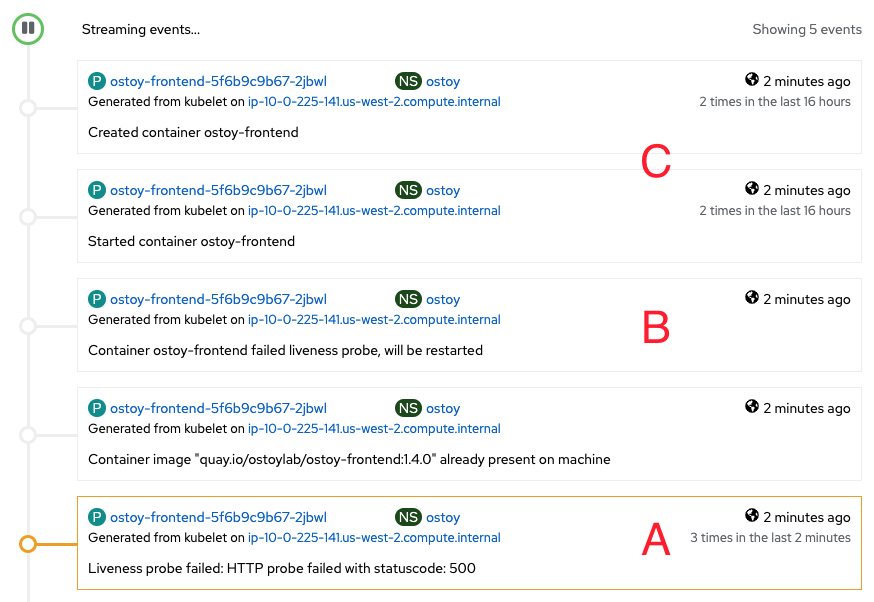
A. Pod で失敗が 3 回連続で発生しました。
B. Kubernetes が Pod を停止します。
C. Kubernetes が Pod を再起動します。
2.4. クラスターストレージの永続ボリューム
{rosa-classic-first} と Red Hat OpenShift Service on AWS は、Amazon Web Services (AWS) Elastic Block Store (EBS) または AWS Elastic File System (EFS) のいずれかを使用して永続ボリュームを保存することをサポートしています。
2.4.1. 永続ボリュームの使用
以下の手順に従ってファイルを作成し、クラスター内の永続ボリュームに保存し、Pod の障害と再作成後もファイルが存在することを確認します。
2.4.1.1. 永続ボリューム要求の表示
手順
- クラスターの OpenShift Web コンソールに移動します。
- 左側のメニューで Storage をクリックし、PersistentVolumeClaims をクリックして、すべての永続ボリューム要求のリストを表示します。
永続ボリューム要求をクリックすると、サイズ、アクセスモード、ストレージクラス、その他の要求の詳細が表示されます。
注記アクセスモードは
ReadWriteOnce(RWO) です。つまり、ボリュームは 1 つのノードにのみマウントでき、Pod または複数の Pod がボリュームの読み取りと書き込みを行うことができます。
2.4.1.2. ファイルの保存
手順
- OSToy アプリケーションコンソールで、左側のメニューで Persistent Storage をクリックします。
-
Filename ボックスに、
.txt拡張子が付いたファイル名 (test-pv.txtなど) を入力します。 -
File contents ボックスに、テキストの文を入力します (例:
OpenShift is the greatest thing since sliced bread!)。 Create file をクリックします。

- OSToy アプリケーションコンソールで 既存のファイル までスクロールします。
作成したファイルをクリックすると、ファイル名と内容が表示されます。

2.4.1.3. Pod のクラッシュ
手順
- OSToy アプリケーションコンソールで、左側のメニューの Home をクリックします。
- Crash Pod をクリックします。
2.4.1.4. 永続ストレージの確認
手順
- Pod が再作成されるまで待機します。
- OSToy アプリケーションコンソールで、左側のメニューで Persistent Storage をクリックします。
作成したファイルを見つけて開き、内容を表示して確認します。

検証
デプロイメント YAML ファイルには /var/demo_files ディレクトリー が永続ボリューム要求にマウントされたことが示されています。
次のコマンドを実行して、フロントエンド Pod の名前を取得します。
$ oc get pods次のコマンドを実行して、コンテナー内でセキュアシェル (SSH) セッションを開始します。
$ oc rsh <pod_name>次のコマンドを実行してディレクトリーに移動します。
$ cd /var/demo_filesオプション: 次のコマンドを実行して、作成したすべてのファイルを表示します。
$ ls次のコマンドを実行して、ファイルを開いてコンテンツを表示します。
$ cat test-pv.txt出力が OSToy アプリケーションコンソールに入力したテキストであることを確認します。
端末の例
$ oc get pods NAME READY STATUS RESTARTS AGE ostoy-frontend-5fc8d486dc-wsw24 1/1 Running 0 18m ostoy-microservice-6cf764974f-hx4qm 1/1 Running 0 18m $ oc rsh ostoy-frontend-5fc8d486dc-wsw24 $ cd /var/demo_files/ $ ls lost+found test-pv.txt $ cat test-pv.txt OpenShift is the greatest thing since sliced bread!
2.4.1.5. セッションの終了
手順
-
ターミナルで
exitと入力してセッションを終了し、CLI に戻ります。
2.5. ConfigMap、シークレット、環境変数
このチュートリアルでは、config map、シークレット、環境変数 を使用して OSToy アプリケーションを設定する方法を示します。
2.5.1. ConfigMap を使用した設定
config map を使用すると、コンテナーイメージのコンテンツから設定アーティファクトを分離して、コンテナー化されたアプリケーションの移植性を維持できます。
手順
OSToy アプリの左側のメニューで、Config Maps をクリックすると、OSToy アプリケーションで使用できる config map の内容が表示されます。このコードスニペットは、config map の設定の例を示しています。
出力例
kind: ConfigMap apiVersion: v1 metadata: name: ostoy-configmap-files data: config.json: '{ "default": "123" }'
2.5.2. シークレットを使用した設定
Kubernetes の Secret オブジェクトを使用すると、パスワード、OAuth トークン、SSH 鍵などの機密情報を保存および管理できます。機密情報をシークレットに格納すると、Pod 定義やコンテナーイメージにプレーンテキストで格納するよりも安全性と柔軟性が高まります。
手順
OSToy アプリの左側のメニューで、Secrets をクリックすると、OSToy アプリケーションで使用できるシークレットの内容が表示されます。このコードスニペットは、シークレットの設定の例を示しています。
出力例
USERNAME=my_user PASSWORD=VVNFUk5BTUU9bXlfdXNlcgpQQVNTV09SRD1AT3RCbCVYQXAhIzYzMlk1RndDQE1UUWsKU01UUD1sb2NhbGhvc3QKU01UUF9QT1JUPTI1 SMTP=localhost SMTP_PORT=25
2.5.3. 環境変数を使用した設定
環境変数を使用すると、コードを変更することなくアプリケーションの動作を簡単に変更できます。同じアプリケーションの別々のデプロイメントで、環境変数によって動作を変えることができます。Red Hat OpenShift Service on AWS では、Pod またはデプロイメントの環境変数の設定、表示、更新を簡単に行うことができます。
手順
OSToy アプリの左側のメニューで、ENV Variables をクリックすると、OSToy アプリケーションで使用できる環境変数が表示されます。このコードスニペットは、環境変数の設定の例を示しています。
出力例
{ "npm_config_local_prefix": "/opt/app-root/src", "STI_SCRIPTS_PATH": "/usr/libexec/s2i", "npm_package_version": "1.7.0", "APP_ROOT": "/opt/app-root", "NPM_CONFIG_PREFIX": "/opt/app-root/src/.npm-global", "OSTOY_MICROSERVICE_PORT_8080_TCP_PORT": "8080", "NODE": "/usr/bin/node", "LD_PRELOAD": "libnss_wrapper.so", "KUBERNETES_SERVICE_HOST": "172.30.0.1", "OSTOY_MICROSERVICE_PORT": "tcp://172.30.60.255:8080", "OSTOY_PORT": "tcp://172.30.152.25:8080", "npm_package_name": "ostoy", "OSTOY_SERVICE_PORT_8080_TCP": "8080", "_": "/usr/bin/node" "ENV_TOY_CONFIGMAP": "ostoy-configmap -env" }
2.6. ネットワーク
OSToy アプリケーションは、クラスター内ネットワークを使用して、マイクロサービスによって機能を分離します。

このワークショップには、それぞれ独自のサービスを持つ少なくとも 2 つの個別の Pod があります。1 つの Pod は、サービスとパブリックにアクセス可能なルートを備えたフロントエンド Web アプリケーションとして機能します。もう一方の Pod は、フロントエンド Pod がマイクロサービスと通信できるように、サービスオブジェクトを備えたバックエンドマイクロサービスとして機能します。
複数の Pod がある場合、Pod 間で通信が行われます。マイクロサービスには、クラスターの外部や他の namespace やプロジェクトからはアクセスできません。このマイクロサービスの目的は、内部 Web リクエストを処理し、現在のホスト名 (Pod の名前) と、ランダムに生成されたカラー文字列を含む JSON オブジェクトを返すことです。このカラー文字列により、OSToy アプリケーションの Web コンソールに、その色のボックスが表示されます。
ネットワークの制限の詳細は、ネットワークポリシーについて を参照してください。
2.6.1. クラスター内ネットワークの設定
OSToy アプリケーションでネットワーク設定を表示できます。
手順
- OSToy アプリケーション Web コンソールで、左側のメニューの Networking をクリックします。
ネットワーク設定を確認します。"Hostname Lookup" というタイルは、Pod 用に作成されたサービス名が、どのように内部 ClusterIP アドレスに変換されるかを示しています。

"Hostname Lookup" タイルに、
<service_name>.<namespace>.svc.cluster.localという形式で、作成したマイクロサービスの名前を入力します。次のコマンドを実行すると、ostoy-microservice.yamlのサービス定義でこのマイクロサービス名を見つけることができます。$ oc get service <name_of_service> -o yaml出力例
apiVersion: v1 kind: Service metadata: name: ostoy-microservice-svc labels: app: ostoy-microservice spec: type: ClusterIP ports: - port: 8080 targetPort: 8080 protocol: TCP selector: app: ostoy-microserviceこの例では、完全なホスト名は、
ostoy-microservice-svc.ostoy.svc.cluster.localです。IP アドレスが返されます。この例では
172.30.165.246です。これはクラスター内 IP アドレスであり、クラスター内からのみアクセスできます。
2.7. アプリケーションのスケーリング
Horizontal Pod Autoscaler (HPA) を使用して、Pod を手動または自動でスケーリングします。クラスターノードをスケーリングすることもできます。
2.7.1. Pod の手動スケーリング
次のいずれかの方法を使用して、アプリケーションの Pod を手動でスケーリングできます。
- ReplicaSet またはデプロイメント定義の変更
- コマンドラインの使用
- Web コンソールの使用
このワークショップでは、まず 1 つの Pod だけをマイクロサービスに使用します。デプロイメント定義でレプリカを 1 に定義すると、Kubernetes レプリケーションコントローラーが 1 つの Pod を維持しようとします。次に、Horizontal Pod Autoscaler (HPA) を使用して Pod の自動スケーリングを定義する方法を説明します。HPA は、負荷に基づき必要に応じて Pod をスケールアウトします。
前提条件
- アクティブな Red Hat OpenShift Service on AWS クラスター
- デプロイ済みの OSToy アプリケーション
手順
- OSToy アプリケーションで、ナビゲーションメニューの Networking タブをクリックします。
"Intra-cluster Communication" セクションで、色がランダムに変化するボックスを見つけます。ボックス内に、マイクロサービスの Pod 名が表示されます。この例では、マイクロサービスの Pod が 1 つしかないため、ボックスは 1 つしかありません。

次のコマンドを実行して、マイクロサービスに対して実行されている Pod が 1 つだけであることを確認します。
$ oc get pods出力例
NAME READY STATUS RESTARTS AGE ostoy-frontend-679cb85695-5cn7x 1/1 Running 0 1h ostoy-microservice-86b4c6f559-p594d 1/1 Running 0 1h- ostoy-microservice-deployment.yaml をダウンロードし、ローカルマシンに保存します。
次の例を使用して、デプロイメント定義を 1 Pod から 3 Pod に変更します。
spec: selector: matchLabels: app: ostoy-microservice replicas: 3次のコマンドを実行してレプリカの変更を適用します。
$ oc apply -f ostoy-microservice-deployment.yaml注記OpenShift Web コンソールで Workloads > Deployments > ostoy-microservice > YAML タブに移動して、
ostoy-microservice-deployment.yamlファイルを編集することもできます。次のコマンドを実行して、Pod が 3 つあることを確認します。
$ oc get pods出力から、マイクロサービスの Pod が 1 つではなく 3 つあることがわかります。
出力例
NAME READY STATUS RESTARTS AGE ostoy-frontend-5fbcc7d9-rzlgz 1/1 Running 0 26m ostoy-microservice-6666dcf455-2lcv4 1/1 Running 0 81s ostoy-microservice-6666dcf455-5z56w 1/1 Running 0 81s ostoy-microservice-6666dcf455-tqzmn 1/1 Running 0 26mコマンドラインインターフェイス (CLI) または Web ユーザーインターフェイス (UI) を使用してアプリケーションをスケーリングします。
CLI で次のコマンドを実行して、Pod の数を
3から2に減らします。$ oc scale deployment ostoy-microservice --replicas=2- OpenShift Web コンソール UI のナビゲーションメニューから、Workloads > Deployments > ostoy-microservice をクリックします。
- 中心に "3 Pod" というラベルがある青い円を見つけます。
円の横にある矢印を選択すると、Pod の数が増加します。下矢印を選択して
2にします。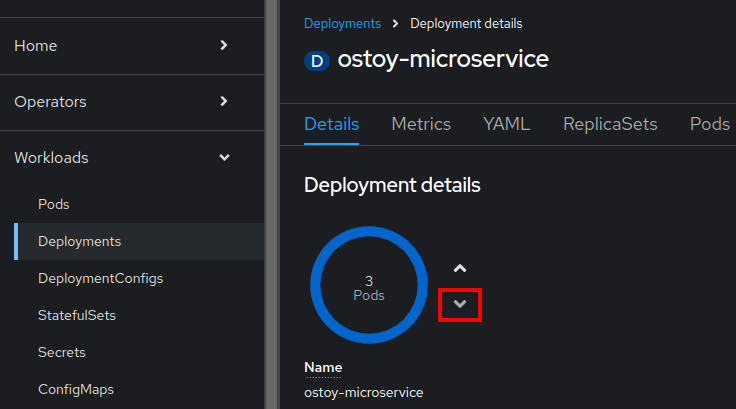
検証
CLI、Web UI、または OSToy アプリケーションを使用して Pod の数を確認します。
ROSA CLI から次のコマンドを実行して、マイクロサービスに 2 つの Pod が使用されていることを確認します。
$ oc get pods出力例
NAME READY STATUS RESTARTS AGE ostoy-frontend-5fbcc7d9-rzlgz 1/1 Running 0 75m ostoy-microservice-6666dcf455-2lcv4 1/1 Running 0 50m ostoy-microservice-6666dcf455-tqzmn 1/1 Running 0 75mWeb UI で、Workloads > Deployments > ostoy-microservice を選択します。

OSToy アプリケーションのナビゲーションメニューで Networking を選択して、2 つの Pod があることを確認することもできます。2 つの Pod の色付きボックスが 2 つがあるはずです。

2.7.2. Pod の自動スケーリング
Red Hat OpenShift Service on AWS は、Horizontal Pod Autoscaler (HPA) を備えています。HPA はメトリクスを使用して、必要に応じて Pod の数を増減します。
前提条件
- アクティブな Red Hat OpenShift Service on AWS クラスター
- デプロイ済みの OSToy アプリケーション
手順
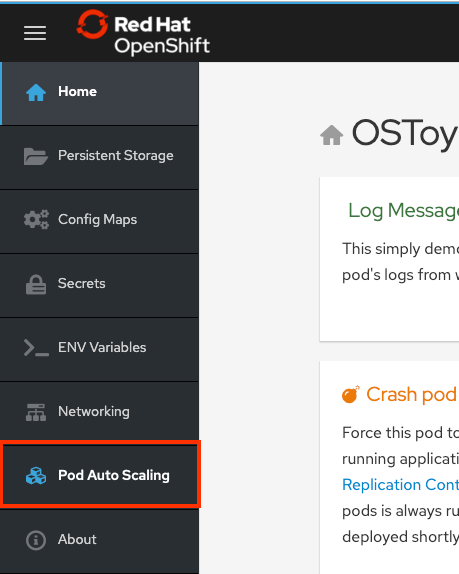
Web UI のナビゲーションメニューから、Pod Auto Scaling を選択します。
次のコマンドを実行して HPA を作成します。
$ oc autoscale deployment/ostoy-microservice --cpu-percent=80 --min=1 --max=10このコマンドは、ostoy-microservice デプロイメントによって制御される Pod のレプリカを 1 - 10 個の間で維持する HPA を作成するものです。HPA は、デプロイ中にレプリカの数を増減して、すべての Pod の平均 CPU 使用率を 80% および 40 ミリコアに保ちます。
Pod Auto Scaling > Horizontal Pod Autoscaling ページで、Increase the load を選択します。
重要負荷が増加すると、が発生するため、ページが応答しなくなる可能性があります。これは予想どおりの反応です。Increase the Load は 1 回だけクリックしてください。プロセスの詳細は、このマイクロサービスの GitHub リポジトリー を参照してください。
数分後、ページに新しい Pod が色付きのボックスで表示されます。
注記ページに遅延が発生する可能性があります。
検証
次のいずれかの方法で Pod 数を確認します。
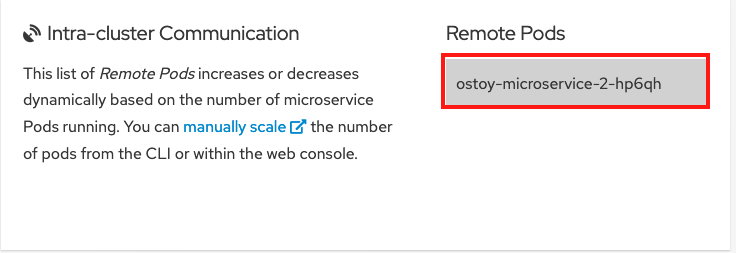
OSToy アプリケーションの Web UI で、Remote Pods ボックスを確認します。
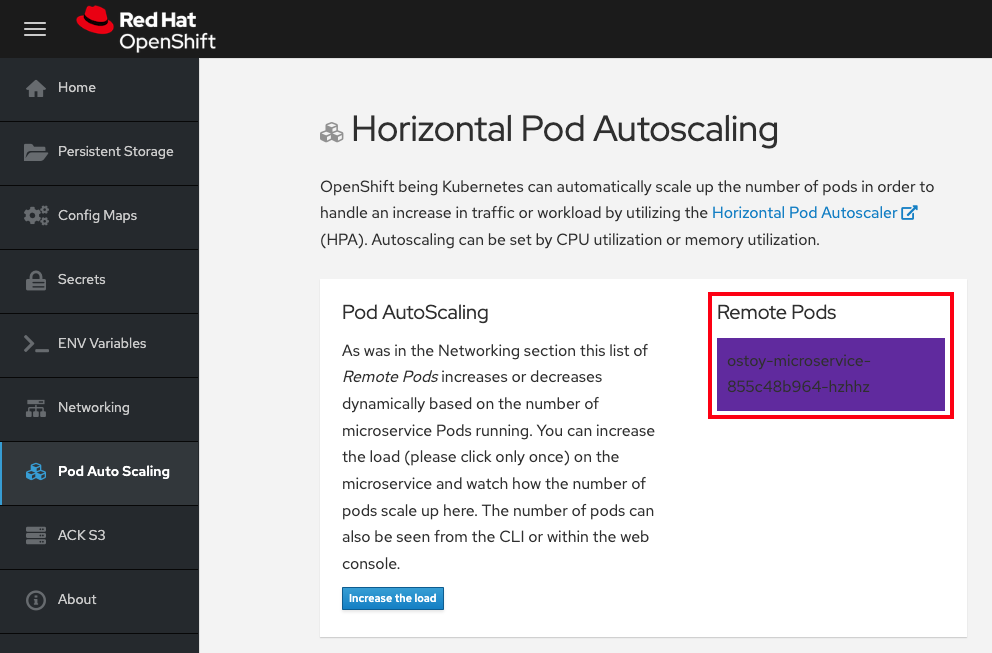
Pod は 1 つしかないため、ワークロードを増やすと Pod も増加するはずです。
CLI で、次のコマンドを実行します。
oc get pods --field-selector=status.phase=Running | grep microservice出力例
ostoy-microservice-79894f6945-cdmbd 1/1 Running 0 3m14s ostoy-microservice-79894f6945-mgwk7 1/1 Running 0 4h24m ostoy-microservice-79894f6945-q925d 1/1 Running 0 3m14sOpenShift Cluster Manager から自動スケーリングを確認することもできます。
- OpenShift Web コンソールのナビゲーションメニューで、Observe > Dashboards をクリックします。
ダッシュボードで、Kubernetes / Compute Resources / Namespace (Pods) と namespace ostoy を選択します。
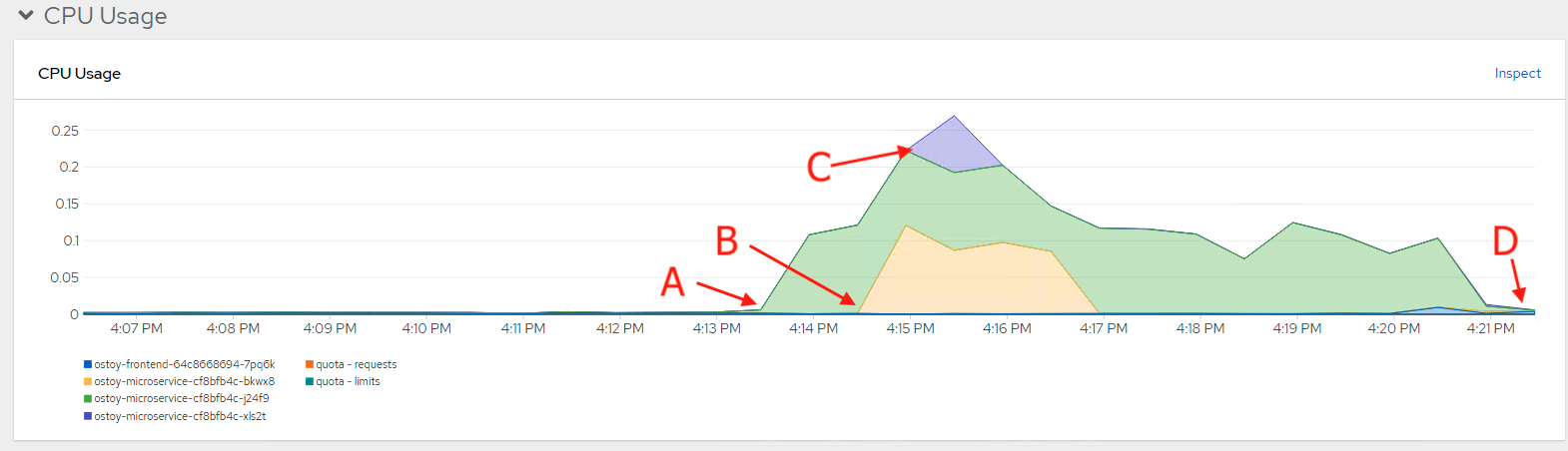
CPU とメモリーのリソース使用状況を示すグラフが表示されます。上のグラフは Pod ごとの最近の CPU 消費量を示し、下のグラフはメモリー使用量を示しています。グラフ内の記号の意味は次のとおりです。
- 負荷が増加しました (A)。
- 2 つの新しい Pod が作成されました (B および C)。
- 各グラフの幅は CPU 消費量を表し、どの Pod がより多くの負荷を処理したかを示しています。
負荷が減少し (D)、Pod が削除されました。
2.7.3. ノードの自動スケーリング
Red Hat OpenShift Service on AWS では、ノードの自動スケーリング を使用できます。ここでは、クラスターが処理できない大きなワークロードを持つジョブを含む新しいプロジェクトを作成します。自動スケーリングが有効な場合、負荷が現在の容量を超えたときに、クラスターが負荷を処理するために新しいノードを自動的に作成します。
前提条件
- アクティブな Red Hat OpenShift Service on AWS クラスター
- デプロイ済みの OSToy アプリケーション
- マシンプールで自動スケーリングが有効になっている。
手順
次のコマンドを実行して、
autoscale-exという新しいプロジェクトを作成します。$ oc new-project autoscale-ex次のコマンドを実行してジョブを作成します。
$ oc create -f https://raw.githubusercontent.com/openshift-cs/rosaworkshop/master/rosa-workshop/ostoy/yaml/job-work-queue.yaml数分後、次のコマンドを実行して Pod を確認します。
$ oc get pods出力例
NAME READY STATUS RESTARTS AGE work-queue-5x2nq-24xxn 0/1 Pending 0 10s work-queue-5x2nq-57zpt 0/1 Pending 0 10s work-queue-5x2nq-58bvs 0/1 Pending 0 10s work-queue-5x2nq-6c5tl 1/1 Running 0 10s work-queue-5x2nq-7b84p 0/1 Pending 0 10s work-queue-5x2nq-7hktm 0/1 Pending 0 10s work-queue-5x2nq-7md52 0/1 Pending 0 10s work-queue-5x2nq-7qgmp 0/1 Pending 0 10s work-queue-5x2nq-8279r 0/1 Pending 0 10s work-queue-5x2nq-8rkj2 0/1 Pending 0 10s work-queue-5x2nq-96cdl 0/1 Pending 0 10s work-queue-5x2nq-96tfr 0/1 Pending 0 10s-
Pending状態の Pod が多数あるため、このステータスによってオートスケーラーがトリガーされ、マシンプールにさらにノードが作成されます。これらのワーカーノードが作成されるまで待ちます。 数分後、次のコマンドを使用して、現在のワーカーノードの数を確認します。
$ oc get nodes出力例
NAME STATUS ROLES AGE VERSION ip-10-0-138-106.us-west-2.compute.internal Ready infra,worker 22h v1.23.5+3afdacb ip-10-0-153-68.us-west-2.compute.internal Ready worker 2m12s v1.23.5+3afdacb ip-10-0-165-183.us-west-2.compute.internal Ready worker 2m8s v1.23.5+3afdacb ip-10-0-176-123.us-west-2.compute.internal Ready infra,worker 22h v1.23.5+3afdacb ip-10-0-195-210.us-west-2.compute.internal Ready master 23h v1.23.5+3afdacb ip-10-0-196-84.us-west-2.compute.internal Ready master 23h v1.23.5+3afdacb ip-10-0-203-104.us-west-2.compute.internal Ready worker 2m6s v1.23.5+3afdacb ip-10-0-217-202.us-west-2.compute.internal Ready master 23h v1.23.5+3afdacb ip-10-0-225-141.us-west-2.compute.internal Ready worker 23h v1.23.5+3afdacb ip-10-0-231-245.us-west-2.compute.internal Ready worker 2m11s v1.23.5+3afdacb ip-10-0-245-27.us-west-2.compute.internal Ready worker 2m8s v1.23.5+3afdacb ip-10-0-245-7.us-west-2.compute.internal Ready worker 23h v1.23.5+3afdacbワークロードを処理するためにワーカーノードが自動的に作成されたことがわかります。
次のコマンドを入力して、OSToy アプリケーションに戻ります。
$ oc project ostoy
2.8. S2I デプロイメント
統合された Source-to-Image (S2I) ビルダーは、OpenShift でアプリケーションをデプロイする方法の 1 つです。S2I は、再現可能な Docker 形式のコンテナーイメージをビルドするためのツールです。詳細は、OpenShift Container Platform 一般用語集 を参照してください。このプロセスを開始する前に、Red Hat OpenShift Service on AWS クラスターをデプロイしておく必要があります。
2.8.1. ログインコマンドの取得
手順
次のコマンドを実行して、ROSA コマンドラインインターフェイス (CLI) (
rosa) にログインしていることを確認します。rosa whoamiコマンドラインインターフェイスにログインしている場合は、「新しいプロジェクトの作成」に進んでください。コマンドラインインターフェイスにログインしていない場合は、この手順を続行します。
ROSA CLI 経由でログインしていない場合は、OpenShift Cluster Manager で、右上の名前の横にあるドロップダウン矢印をクリックし、Copy Login Command を選択します。

- 新しいタブが開きます。ユーザー名とパスワードを入力し、認証方法を選択します。
- Display Token をクリックします。
- "Log in with this token" の下のコマンドをコピーします。
コピーしたコマンドをターミナルで実行して CLI にログインします。
入力の例
$ oc login --token=RYhFlXXXXXXXXXXXX --server=https://api.osd4-demo.abc1.p1.openshiftapps.com:6443出力例
Logged into "https://api.myrosacluster.abcd.p1.openshiftapps.com:6443" as "rosa-user" using the token provided. You don't have any projects. You can try to create a new project, by running oc new-project <project name>
2.8.2. 新しいプロジェクトの作成
次のコマンドを実行して、CLI から新しいプロジェクトを作成します。
$ oc new-project ostoy-s2i
2.8.3. OSToy リポジトリーのフォーク
ソースコードの変更に基づいて自動ビルドをトリガーするには、GitHub Webhook を設定する必要があります。この Webhook により、GitHub リポジトリーにコードをプッシュしたときに S2I ビルドをトリガーします。Webhook を設定するには、まず リポジトリー をフォークする必要があります。
このガイドで以下に示す URL の <UserName> は、自分の GitHub ユーザー名に置き換えてください。
2.8.4. S2i を使用してクラスターに OSToy をデプロイする
手順
OpenShift にシークレットを追加します。
この例では、
.envファイルをエミュレートします。ファイルは OpenShift 環境内に直接かつ簡単に移動できます。シークレット内でファイル名を変更することも可能です。次のコマンドを実行します。
<UserName>は、GitHub ユーザー名に置き換えます。$ oc create -f https://raw.githubusercontent.com/<UserName>/ostoy/master/deployment/yaml/secret.yaml
OpenShift に ConfigMap を追加します。
この例では、HAProxy 設定ファイルをエミュレートします。これは、通常 OpenShift アプリケーションのデフォルト設定をオーバーライドするために使用されます。ファイルの名前は ConfigMap で変更できます。
次のコマンドを実行します。
<UserName>は、GitHub ユーザー名に置き換えます。$ oc create -f https://raw.githubusercontent.com/<UserName>/ostoy/master/deployment/yaml/configmap.yaml
マイクロサービスをデプロイします。
UI アプリケーションからサービスの環境変数を使用できるように、マイクロサービスをデプロイする必要があります。
--context-dirは、Git リポジトリー内のmicroserviceディレクトリーで定義されたアプリケーションをビルドします。appラベルにより、ユーザーインターフェイス (UI) アプリケーションとマイクロサービスの両方が OpenShift UI で確実にグループ化されます。次のコマンドを実行してマイクロサービスを作成します。
<UserName>は、GitHub ユーザー名に置き換えます。$ oc new-app https://github.com/<UserName>/ostoy \ --context-dir=microservice \ --name=ostoy-microservice \ --labels=app=ostoy出力例
--> Creating resources with label app=ostoy ... imagestream.image.openshift.io "ostoy-microservice" created buildconfig.build.openshift.io "ostoy-microservice" created deployment.apps "ostoy-microservice" created service "ostoy-microservice" created --> Success Build scheduled, use 'oc logs -f buildconfig/ostoy-microservice' to track its progress. Application is not exposed. You can expose services to the outside world by executing one or more of the commands below: 'oc expose service/ostoy-microservice' Run 'oc status' to view your app.
マイクロサービスのステータスを確認します。
次のコマンドを実行して、マイクロサービスが作成され、正しく実行されていることを確認します。
$ oc status出力例
In project ostoy-s2i on server https://api.myrosacluster.g14t.p1.openshiftapps.com:6443 svc/ostoy-microservice - 172.30.47.74:8080 dc/ostoy-microservice deploys istag/ostoy-microservice:latest <- bc/ostoy-microservice source builds https://github.com/UserName/ostoy on openshift/nodejs:14-ubi8 deployment #1 deployed 34 seconds ago - 1 podマイクロサービスが正常にデプロイされたことが表示されるまで待ちます。Web UI からこれを確認することもできます。
フロントエンド UI をデプロイします。
このアプリケーションは、外部設定を定義するために、いくつかの環境変数に依存しています。
次のコマンドを実行して、シークレットと ConfigMap をアタッチし、PersistentVolume を作成します。
$ oc new-app https://github.com/<UserName>/ostoy \ --env=MICROSERVICE_NAME=OSTOY_MICROSERVICE出力例
--> Creating resources ... imagestream.image.openshift.io "ostoy" created buildconfig.build.openshift.io "ostoy" created deployment.apps "ostoy" created service "ostoy" created --> Success Build scheduled, use 'oc logs -f buildconfig/ostoy' to track its progress. Application is not exposed. You can expose services to the outside world by executing one or more of the commands below: 'oc expose service/ostoy' Run 'oc status' to view your app.
次のコマンドを実行してデプロイメントを更新します。
$ oc patch deployment ostoy --type=json -p \ '[{"op": "replace", "path": "/spec/strategy/type", "value": "Recreate"}, {"op": "remove", "path": "/spec/strategy/rollingUpdate"}]'liveness プローブを設定します。
アプリケーションに問題がある場合に Pod が再起動するように、liveness プローブを作成します。
以下のコマンドを実行します。
$ oc set probe deployment ostoy --liveness --get-url=http://:8080/health
シークレット、ConfigMap、永続ボリュームをデプロイメントにアタッチします。
次のコマンドを実行してシークレットをアタッチします。
$ oc set volume deployment ostoy --add \ --secret-name=ostoy-secret \ --mount-path=/var/secret次のコマンドを実行して ConfigMap をアタッチします。
$ oc set volume deployment ostoy --add \ --configmap-name=ostoy-config \ -m /var/config次のコマンドを実行して、永続ボリュームを作成してアタッチします。
$ oc set volume deployment ostoy --add \ --type=pvc \ --claim-size=1G \ -m /var/demo_files
UI アプリケーションを OpenShift ルートとして公開します。
次のコマンドを実行して、同梱の TLS ワイルドカード証明書を使用する HTTPS アプリケーションとしてアプリケーションをデプロイします。
$ oc create route edge --service=ostoy --insecure-policy=Redirect
次の方法でアプリケーションに移動します。
次のコマンドを実行して、OSToy アプリケーションで Web ブラウザーを開きます。
$ python -m webbrowser "$(oc get route ostoy -o template --template='https://{{.spec.host}}')"次のコマンドを実行してアプリケーションのルートを取得し、そのルートをコピーしてブラウザーに貼り付けます。
$ oc get route
2.9. Source-to-Image (S2I) Webhook を使用した自動デプロイ
Webhook を使用して、ソースコードを変更するたびに、ビルドとデプロイを自動的にトリガーします。このプロセスの詳細は、Triggering Builds を参照してください。
2.9.1. 自動デプロイメントの設定
次のコマンドを実行して、GitHub Webhook トリガーのシークレットを取得します。
$ oc get bc/ostoy-microservice -o=jsonpath='{.spec.triggers..github.secret}'出力例
`o_3x9M1qoI2Wj_cz1WiK`重要このプロセスの後のステップでこのシークレットを使用する必要があります。
次のコマンドを実行して、OSToy の buildconfig から GitHub Webhook トリガーの URL を取得します。
$ oc describe bc/ostoy-microservice出力例
[...] Webhook GitHub: URL: https://api.demo1234.openshift.com:443/apis/build.openshift.io/v1/namespaces/ostoy-s2i/buildconfigs/ostoy/webhooks/<secret>/github [...]GitHub Webhook URL の
<secret>テキストを、取得したシークレットに置き換えます。実際の URL は、次の出力例のようになります。出力例
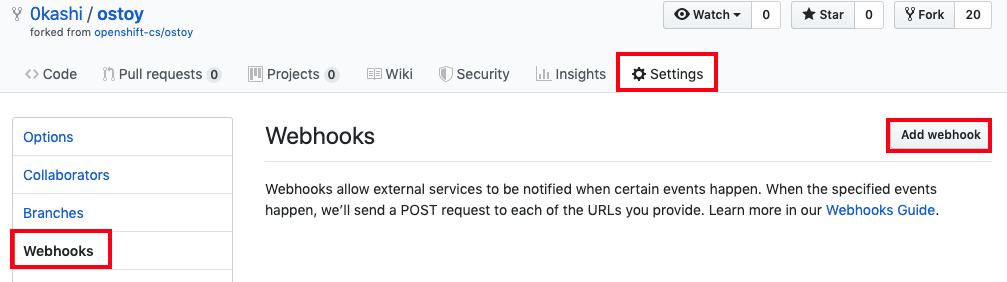
https://api.demo1234.openshift.com:443/apis/build.openshift.io/v1/namespaces/ostoy-s2i/buildconfigs/ostoy-microservice/webhooks/o_3x9M1qoI2Wj_czR1WiK/githubGitHub リポジトリーで Webhook URL を設定します。
リポジトリーで、Settings > Webhooks > Add webhook をクリックします。
-
"Payload URL" フィールドに、
Secretを含む GitHub Webhook URL を貼り付けます。 -
"Content type" を
application/jsonに変更します。 Add webhook ボタンをクリックします。
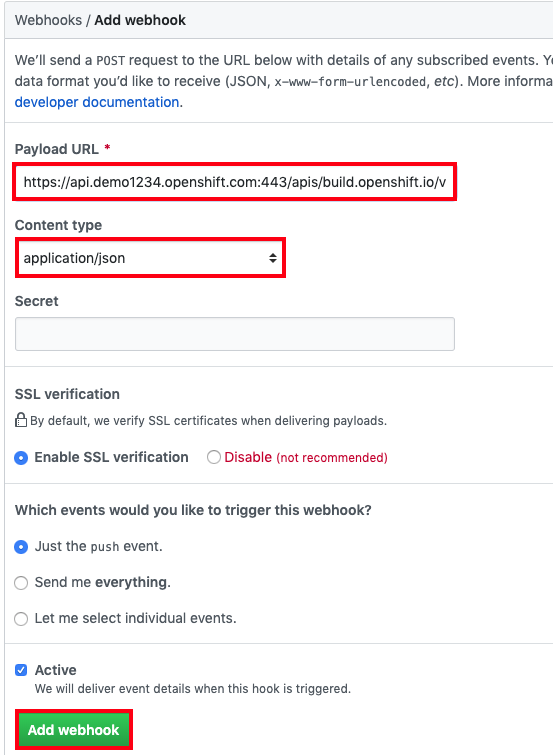
Webhook が正常に設定されたことを示す GitHub のメッセージが表示されます。これで、GitHub リポジトリーに変更をプッシュするたびに、新しいビルドが自動的に開始し、ビルドが成功すると新しいデプロイが開始します。
ソースコードを変更します。変更すると、ビルドとデプロイが自動的にトリガーされます。この例では、OSToy アプリケーションのステータスを示す色がランダムに選択されます。設定をテストするために、ボックスをグレースケール表示に変更します。
- リポジトリー内のソースコード https://github.com/<username>/ostoy/blob/master/microservice/app.js に移動します。
- ファイルを編集します。
-
8 行目 (
let randomColor = getRandomColor();を含む行) をコメントアウトします。 9 行目 (
let randomColor = getRandomGrayScaleColor();を含む行) のコメントを解除します。7 app.get('/', function(request, response) { 8 //let randomColor = getRandomColor(); // <-- comment this 9 let randomColor = getRandomGrayScaleColor(); // <-- uncomment this 10 11 response.writeHead(200, {'Content-Type': 'application/json'});- "changed box to grayscale colors" など、更新を示すメッセージを入力します。
- 下部の Commit をクリックして、変更をメインブランチにコミットします。
クラスターの Web UI で、Builds > Builds をクリックして、ビルドのステータスを確認します。このビルドが完了すると、デプロイが開始します。ターミナルで
oc statusを実行してステータスを確認することもできます。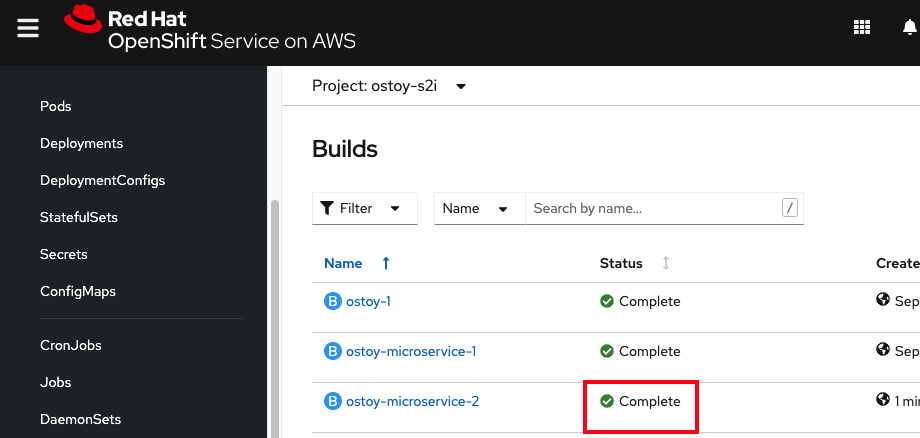
デプロイが完了したら、ブラウザーで OSToy アプリケーションに戻ります。左側の Networking メニュー項目にアクセスします。ボックスの色がグレースケールの色だけに制限されるようになります。
Legal Notice
Copyright © Red Hat
OpenShift documentation is licensed under the Apache License 2.0 (https://www.apache.org/licenses/LICENSE-2.0).
Modified versions must remove all Red Hat trademarks.
Portions adapted from https://github.com/kubernetes-incubator/service-catalog/ with modifications by Red Hat.
Red Hat, Red Hat Enterprise Linux, the Red Hat logo, the Shadowman logo, JBoss, OpenShift, Fedora, the Infinity logo, and RHCE are trademarks of Red Hat, Inc., registered in the United States and other countries.
Linux® is the registered trademark of Linus Torvalds in the United States and other countries.
Java® is a registered trademark of Oracle and/or its affiliates.
XFS® is a trademark of Silicon Graphics International Corp. or its subsidiaries in the United States and/or other countries.
MySQL® is a registered trademark of MySQL AB in the United States, the European Union and other countries.
Node.js® is an official trademark of the OpenJS Foundation.
The OpenStack® Word Mark and OpenStack logo are either registered trademarks/service marks or trademarks/service marks of the OpenStack Foundation, in the United States and other countries and are used with the OpenStack Foundation’s permission. We are not affiliated with, endorsed or sponsored by the OpenStack Foundation, or the OpenStack community.
All other trademarks are the property of their respective owners.