ノード
Red Hat OpenShift Service on AWS のノード
概要
第1章 ノードの概要
1.1. ノードについて
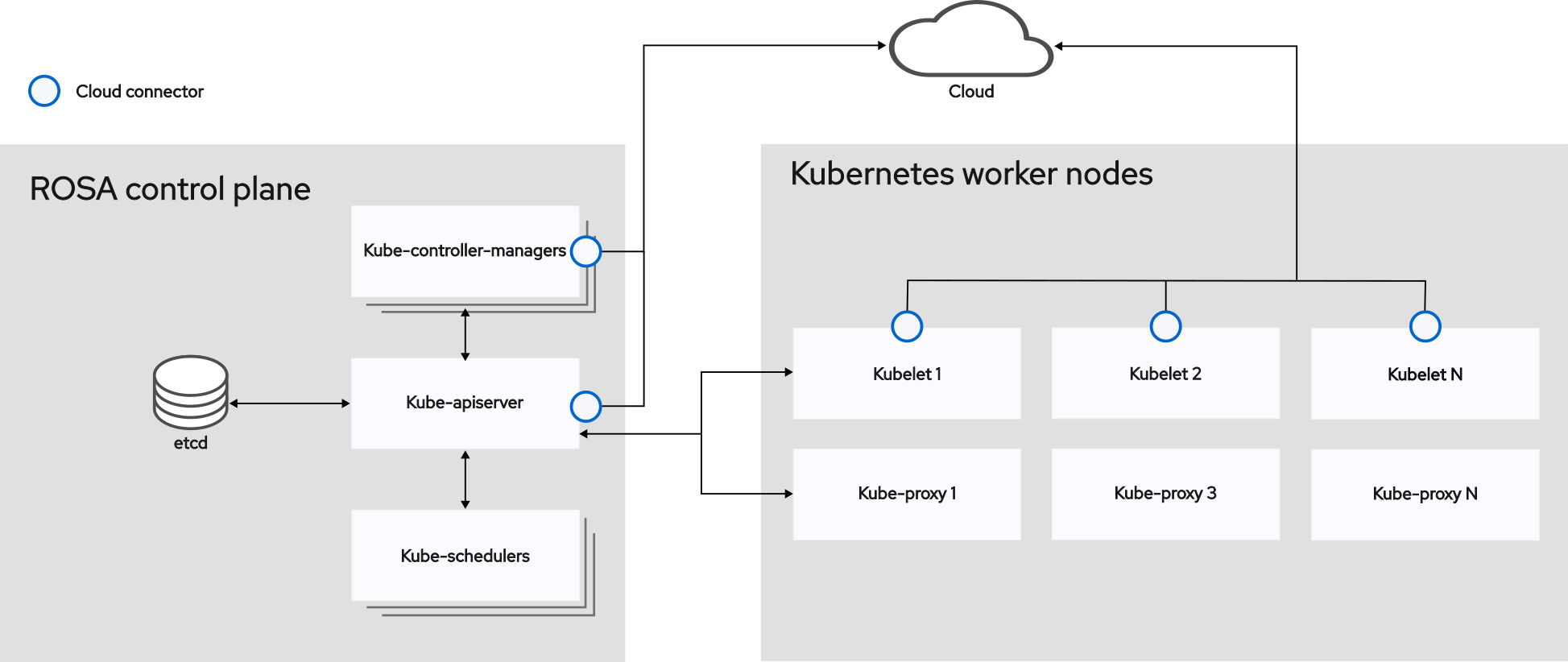
ノードは、Kubernetes クラスター内の仮想マシンまたはベアメタルマシンです。ワーカーノードは、Pod としてグループ化されたアプリケーションコンテナーをホストします。コントロールプレーンノードは、Kubernetes クラスターを制御するために必要なサービスを実行します。Red Hat OpenShift Service on AWS では、コントロールプレーンノードは Red Hat が所有する AWS アカウントでホストされます。Red Hat が、お客様の代わりにコントロールプレーンのインフラストラクチャーを完全に管理します。
ワーカーノードは永続性が保証されておらず、OpenShift の通常の運用および管理の一環として、いつでも置き換えられる可能性があります。詳細は、ノードのライフサイクル を参照してください。
クラスター内に安定した正常なノードを持つことは、ホストされたアプリケーションがスムーズに機能するための基本です。Red Hat OpenShift Service on AWS では、ノードを表す Node オブジェクトを介してノードにアクセス、管理、およびモニターできます。OpenShift CLI (oc) または Web コンソールを使用して、ノードで以下の操作を実行できます。
ノードの次のコンポーネントは、Pod の実行を維持し、Kubernetes ランタイム環境を提供するロールを果たします。
- コンテナーランタイム
- コンテナーランタイムはコンテナーの実行を担当します。Red Hat OpenShift Service on AWS は、クラスター内の各 Red Hat Enterprise Linux CoreOS (RHCOS) ノードに CRI-O コンテナーランタイムをデプロイします。Windows Machine Config Operator (WMCO) は、Windows ノードに containerd ランタイムをデプロイします。
- Kubelet
- Kubelet はノード上で実行され、コンテナーマニフェストを読み取ります。定義されたコンテナーが開始され、実行されていることを確認します。kubelet プロセスは、作業の状態とノードサーバーを維持します。Kubelet は、ネットワークルールとポートフォワーディングを管理します。kubelet は、Kubernetes によってのみ作成されたコンテナーを管理します。
- DNS
- クラスター DNS は、Kubernetes サービスの DNS レコードを提供する DNS サーバーです。Kubernetes により開始したコンテナーは、DNS 検索にこの DNS サーバーを自動的に含めます。
1.1.1. 読み取り操作
読み取り操作により、管理者または開発者は Red Hat OpenShift Service on AWS クラスター内のノードに関する情報を取得できます。
- クラスター内のすべてのノードを一覧表示します。
- メモリーと CPU の使用率、ヘルス、ステータス、経過時間など、ノードに関する情報を取得します。
- ノードで実行されている Pod を一覧表示します。
1.1.2. エンハンスメント操作
Red Hat OpenShift Service on AWS で可能なことは、ノードへのアクセスと管理だけではありません。管理者は、ノードで次のタスクを実行して、クラスターをより効率的でアプリケーションに適したものにし、開発者により良い環境を提供できます。
- Node Tuning Operator を使用して、ある程度のカーネルチューニングを必要とする高性能アプリケーションのノードレベルのチューニングを管理します。
- デーモンセットを使用して、ノードでバックグラウンドタスクを自動的に実行します。デーモンセットを作成して使用し、共有ストレージを作成したり、すべてのノードでロギング Pod を実行したり、すべてのノードに監視エージェントをデプロイしたりできます。
1.2. Pod について
Pod は、ノードに一緒にデプロイされる 1 つ以上のコンテナーです。クラスター管理者は、Pod を定義し、スケジューリングの準備ができている正常なノードで実行するように割り当て、管理することができます。コンテナーが実行されている限り、Pod は実行されます。Pod を定義して実行すると、Pod を変更することはできません。Pod を操作するときに実行できる操作は次のとおりです。
1.2.1. 読み取り操作
管理者は、次のタスクを通じてプロジェクト内の Pod に関する情報を取得できます。
- レプリカと再起動の数、現在のステータス、経過時間などの情報を含む、プロジェクトに関連付けられている Pod を一覧表示 します。
- CPU、メモリー、ストレージ消費量などの Pod 使用状況の統計を表示 します。
1.2.2. 管理操作
次のタスクのリストは、管理者が Red Hat OpenShift Service on AWS で Pod を管理する方法の概要を示しています。
Red Hat OpenShift Service on AWS で利用可能な高度なスケジューリング機能を使用して、Pod のスケジューリングを制御します。
- Pod アフィニティー、ノードアフィニティー、アンチ アフィニティーなどのノードから Pod へのバインディングルール。
- ノードラベルとセレクター。
- Pod トポロジー分散制約。
- Pod コントローラーと再起動ポリシーを使用して、再起動後の Pod の動作を設定します。
- Pod で送信トラフィックと受信トラフィックの両方を制限 します。
- Pod テンプレートを持つ任意のオブジェクトにボリュームを追加および削除します。ボリュームは、Pod 内のすべてのコンテナーで使用できるマウントされたファイルシステムです。コンテナーストレージは一時的なものです。ボリュームを使用すると、コンテナーデータを永続化できます。
1.2.3. エンハンスメント操作
Red Hat OpenShift Service on AWS で利用可能なさまざまなツールと機能を使用して、Pod をより簡単かつ効率的に操作できます。次の操作では、これらのツールと機能を使用して Pod をより適切に管理します。
-
Secrets: 一部のアプリケーションでは、パスワードやユーザー名などの機密情報が必要です。管理者は
Secretオブジェクトを使用して、Secretオブジェクトを使用する Pod に機密データを提供できます。
1.3. コンテナーについて
コンテナーは、Red Hat OpenShift Service on AWS アプリケーションの基本ユニットであり、依存関係、ライブラリー、およびバイナリーとともにパッケージ化されたアプリケーションコードで構成されます。コンテナーは、複数の環境、および物理サーバー、仮想マシン (VM)、およびプライベートまたはパブリッククラウドなどの複数のデプロイメントターゲット間に一貫性をもたらします。
Linux コンテナーテクノロジーは、実行中のプロセスを分離し、指定されたリソースのみへのアクセスを制限するための軽量メカニズムです。管理者は、Linux コンテナーで次のようなさまざまなタスクを実行できます。
Red Hat OpenShift Service on AWS は、Init コンテナー と呼ばれる特殊なコンテナーを提供します。Init コンテナーは、アプリケーションコンテナーの前に実行され、アプリケーションイメージに存在しないユーティリティーまたはセットアップスクリプトを含めることができます。Pod の残りの部分がデプロイされる前に、Init コンテナーを使用してタスクを実行できます。
ノード、Pod、およびコンテナーで特定のタスクを実行する以外に、Red Hat OpenShift Service on AWS クラスター全体を操作して、クラスターの効率とアプリケーション Pod の高可用性を維持できます。
1.4. Red Hat OpenShift Service on AWS ノードの一般用語集
この用語集では、ノード のコンテンツで使用される一般的な用語を定義しています。
- コンテナー
- これは、ソフトウェアとそのすべての依存関係を構成する軽量で実行可能なイメージです。コンテナーはオペレーティングシステムを仮想化するため、データセンターからパブリックまたはプライベートクラウド、さらには開発者のラップトップまで、どこでもコンテナーを実行できます。
- デーモンセット
- Pod のレプリカが Red Hat OpenShift Service on AWS クラスター内の対象となるノードで実行されるようにします。
- Egress
- Pod からのネットワークのアウトバウンドトラフィックを介して外部とデータを共有するプロセス。
- ガベージコレクション
- 終了したコンテナーや実行中の Pod によって参照されていないイメージなどのクラスターリソースをクリーンアップするプロセス。
- Ingress
- Pod への着信トラフィック。
- ジョブ
- 完了するまで実行されるプロセス。ジョブは 1 つ以上の Pod オブジェクトを作成し、指定された Pod が正常に完了するようにします。
- ラベル
- キーと値のペアであるラベルを使用して、Pod などのオブジェクトのサブセットを整理および選択できます。
- ノード
- Red Hat OpenShift Service on AWS クラスター内のワーカーマシンです。ノードは、仮想マシン (VM) または物理マシンのいずれかになります。
- Node Tuning Operator
- Node Tuning Operator を使用すると、TuneD デーモンを使用してノードレベルのチューニングを管理できます。これにより、カスタムチューニング仕様が、デーモンが認識する形式でクラスターで実行されるすべてのコンテナー化された TuneD デーモンに渡されます。デーモンは、ノードごとに 1 つずつ、クラスターのすべてのノードで実行されます。
- Self Node Remediation Operator
- Operator はクラスターノードで実行され、異常なノードを特定して再起動します。
- Pod
- Red Hat OpenShift Service on AWS クラスターで実行されている、ボリュームや IP アドレスなどの共有リソースを持つ 1 つ以上のコンテナー。Pod は、定義、デプロイ、および管理される最小のコンピュート単位です。
- toleration
- taint が一致するノードまたはノードグループで Pod をスケジュールできる (必須ではない) ことを示します。toleration を使用して、スケジューラーが一致する taint を持つ Pod をスケジュールできるようにすることができます。
- taint
- キー、値、および Effect で構成されるコアオブジェクト。taint と toleration が連携して、Pod が無関係なノードでスケジュールされないようにします。
第2章 Pod の使用
2.1. Pod の使用
Pod は 1 つのホストにデプロイされる 1 つ以上のコンテナーであり、定義され、デプロイされ、管理される最小のコンピュート単位です。
2.1.1. Pod について
Pod はコンテナーに対してマシンインスタンス (物理または仮想) とほぼ同じ機能を持ちます。各 Pod は独自の内部 IP アドレスで割り当てられるため、そのポートスペース全体を所有し、Pod 内のコンテナーはそれらのローカルストレージおよびネットワークを共有できます。
Pod にはライフサイクルがあります。それらは定義された後にノードで実行されるために割り当てられ、コンテナーが終了するまで実行されるか、その他の理由でコンテナーが削除されるまで実行されます。ポリシーおよび終了コードによっては、Pod は終了後に削除されるか、コンテナーのログへのアクセスを有効にするために保持される可能性があります。
Red Hat OpenShift Service on AWS は Pod をほぼイミュータブルなものとして扱います。Pod の実行中に Pod 定義を変更することはできません。Red Hat OpenShift Service on AWS は、既存の Pod を終了し、変更された設定、ベースイメージ、またはその両方を使用して Pod を再作成することによって変更を実装します。Pod は拡張可能なものとしても処理されますが、再作成時に状態を維持しません。そのため、Pod はユーザーが直接管理するのではなく、通常は上位レベルのコントローラーによって管理される必要があります。
レプリケーションコントローラーによって管理されないベア Pod はノードの中断時に再スケジュールされません。
2.1.2. Pod 設定の例
Red Hat OpenShift Service on AWS は、Kubernetes の Pod の概念を活用しています。Pod は、1 つのホスト上に一緒にデプロイされる 1 つ以上のコンテナーであり、定義、デプロイ、管理できる最小のコンピュート単位です。
以下は Pod の定義例です。これは数多くの Pod の機能を示していますが、それらのほとんどは他のトピックで説明されるため、ここではこれらを簡単に説明します。
Pod オブジェクト定義 (YAML)
kind: Pod
apiVersion: v1
metadata:
name: example
labels:
environment: production
app: abc
spec:
restartPolicy: Always
securityContext:
runAsNonRoot: true
seccompProfile:
type: RuntimeDefault
containers:
- name: abc
args:
- sleep
- "1000000"
volumeMounts:
- name: cache-volume
mountPath: /cache
image: registry.access.redhat.com/ubi7/ubi-init:latest
securityContext:
allowPrivilegeEscalation: false
runAsNonRoot: true
capabilities:
drop: ["ALL"]
resources:
limits:
memory: "100Mi"
cpu: "1"
requests:
memory: "100Mi"
cpu: "1"
volumes:
- name: cache-volume
emptyDir:
sizeLimit: 500Mi- 1
- Pod には 1 つまたは複数のラベルで "タグ付け" することができ、このラベルを使用すると、一度の操作で Pod グループの選択や管理が可能になります。これらのラベルは、キー/値形式で
metadataハッシュに保存されます。 - 2
- Pod 再起動ポリシーと使用可能な値の
Always、OnFailure、およびNeverです。デフォルト値はAlwaysです。 - 3
- Red Hat OpenShift Service on AWS は、コンテナーを特権付きコンテナーとして実行するか、選択したユーザーとして実行するかどうかを指定するセキュリティーコンテキストを定義します。デフォルトのコンテキストには多くの制限がありますが、管理者は必要に応じてこれを変更できます。
- 4
containersは、1 つ以上のコンテナー定義の配列を指定します。- 5
- コンテナーは、コンテナー内に外部ストレージボリュームをマウントする場所を指定します。
- 6
- Pod に提供するボリュームを指定します。ボリュームは指定されたパスにマウントされます。コンテナーのルート (
/) や、ホストとコンテナーで同じパスにはマウントしないでください。これは、コンテナーに十分な特権が付与されている場合に、ホストシステムを破壊する可能性があります (例: ホストの/dev/ptsファイル)。ホストをマウントするには、/hostを使用するのが安全です。 - 7
- Pod 内の各コンテナーは、独自のコンテナーイメージからインスタンス化されます。
- 8
- Pod は、コンテナーで使用できるストレージボリュームを定義します。
ファイル数が多い永続ボリュームを Pod に割り当てる場合、それらの Pod は失敗するか、起動に時間がかかる場合があります。詳細は、When using Persistent Volumes with high file counts in OpenShift, why do pods fail to start or take an excessive amount of time to achieve "Ready" state? を参照してください。
この Pod 定義には、Pod が作成され、ライフサイクルが開始した後に Red Hat OpenShift Service on AWS によって自動的に設定される属性が含まれません。Kubernetes Pod ドキュメント には、Pod の機能および目的の詳細が記載されています。
2.1.3. リソース要求および制限について
Pod の仕様 (「Pod 設定の例」を参照) または Pod の制御オブジェクトの仕様を使用すると、Pod の CPU およびメモリーの要求と制限を指定できます。
CPU およびメモリーの 要求 は、Pod の実行に必要なリソースの最小量を指定するものです。これは、Red Hat OpenShift Service on AWS が十分なリソースを持つノードに Pod をスケジュールするのに役立ちます。
CPU とメモリーの 制限 は、Pod が消費できるリソースの最大量を定義するものです。これは、Pod がリソースを過剰に消費して同じノード上の他の Pod に影響を与える可能性を防ぎます。
CPU およびメモリーの要求と制限は、次の原則に従って処理されます。
CPU 制限は、CPU スロットリングを使用して適用されます。コンテナーが CPU 制限に近づくと、コンテナーの制限として指定された CPU へのアクセスをカーネルが制限します。したがって、CPU 制限はカーネルによって適用されるハード制限です。Red Hat OpenShift Service on AWS では、コンテナーが CPU 制限を長時間超過することが許される場合があります。ただし、コンテナーランタイムは、CPU 使用率が高すぎる場合でも Pod またはコンテナーを終了しません。
CPU の制限と要求は CPU 単位で測定されます。1 つの CPU ユニットは、ノードが物理ホストであるか、物理マシン内で実行されている仮想マシンであるかに応じて、1 つの物理 CPU コアまたは 1 つの仮想コアに相当します。小数の要求も許可されます。たとえば、CPU 要求を
0.5にしてコンテナーを定義すると、1.0CPU を要求した場合の半分の CPU 時間を要求することになります。CPU ユニットの場合、0.1は100mに相当します。これは 100 millicpu または 100 ミリコア として読み取られます。CPU リソースは常に絶対的なリソース量であり、相対的な量ではありません。注記デフォルトでは、Pod に割り当てることができる CPU の最小量は 10 mCPU です。Pod の仕様では、10 mCPU 未満のリソース制限を要求できます。その場合も、Pod には 10 mCPU が割り当てられます。
メモリー制限は、カーネルにより、Out of Memory (OOM) による強制終了を使用して適用されます。コンテナーがメモリー制限を超えるメモリーを使用する場合、カーネルはそのコンテナーを終了できます。ただし、終了はカーネルがメモリーの逼迫を検出した場合にのみ実行されます。そのため、メモリーを過剰に割り当てるコンテナーがすぐに強制終了されないことがあります。つまり、メモリー制限はリアクティブに適用されます。コンテナーはメモリー制限を超えるメモリーを使用することがあります。その場合、コンテナーが強制終了される可能性があります。
メモリーは、数量を表す
E、P、T、G、M、またはkのいずれかの接尾辞を使用して、単純な整数または固定小数点数として表すことができます。対応する 2 のべき乗の単位 (Ei、Pi、Ti、Gi、Mi、またはKi) を使用することもできます。
Pod が実行されているノードに十分なリソースがある場合、コンテナーは要求よりも多くの CPU またはメモリーリソースを使用する可能性があります。ただし、コンテナーは対応する制限を超えることはできません。たとえば、コンテナーのメモリー要求を 256 MiB に設定し、そのコンテナーが 8GiB のメモリーを持つノードにスケジュールされた Pod 内にあり、そのノードに他の Pod がない場合、コンテナーは要求された 256 MiB より多くのメモリーを使用しようとする可能性があります。
この動作は CPU およびメモリーの制限には適用されません。CPU およびメモリーの制限は、kubelet とコンテナーランタイムによって適用され、カーネルによって強制されます。Linux ノードでは、カーネルが cgroups を使用して制限を適用します。
2.2. Pod の表示
管理者は、クラスター Pod を表示し、その健全性をチェックして、クラスターの全体的な健全性を評価できます。特定のプロジェクトに関連付けられている Pod のリストを表示したり、Pod に関する使用状況統計を表示したりすることもできます。Pod を定期的に表示すると、問題を早期に検出し、リソースの使用状況を追跡し、クラスターの安定性を確保するのに役立ちます。
2.2.1. プロジェクトでの Pod の表示
CPU、メモリー、ストレージ消費量などの Pod の使用状況に関する統計情報を表示して、コンテナーのランタイム環境を監視し、効率的なリソース使用を確保できます。
手順
次のコマンドを入力してプロジェクトに変更します。
$ oc project <project_name>次のコマンドを入力して Pod のリストを取得します。
$ oc get pods出力例
NAME READY STATUS RESTARTS AGE console-698d866b78-bnshf 1/1 Running 2 165m console-698d866b78-m87pm 1/1 Running 2 165mオプション: Pod の IP アドレスと Pod が配置されているノードを表示するには、
-o wideフラグを追加します。以下に例を示します。$ oc get pods -o wide出力例
NAME READY STATUS RESTARTS AGE IP NODE NOMINATED NODE console-698d866b78-bnshf 1/1 Running 2 166m 10.128.0.24 ip-10-0-152-71.ec2.internal <none> console-698d866b78-m87pm 1/1 Running 2 166m 10.129.0.23 ip-10-0-173-237.ec2.internal <none>
2.2.2. Pod の使用状況に関する統計の表示
コンテナーのランタイム環境を提供する、Pod に関する使用状況の統計を表示できます。これらの使用状況の統計には CPU、メモリー、およびストレージの消費量が含まれます。
前提条件
-
使用状況の統計を表示するには、
cluster-reader権限が必要です。 - 使用状況の統計を表示するには、メトリクスをインストールしている必要があります。
手順
次のコマンドを入力して使用状況の統計情報を表示します。
$ oc adm top pods -n <namespace>出力例
NAME CPU(cores) MEMORY(bytes) console-7f58c69899-q8c8k 0m 22Mi console-7f58c69899-xhbgg 0m 25Mi downloads-594fcccf94-bcxk8 3m 18Mi downloads-594fcccf94-kv4p6 2m 15Miオプション: ラベル付き Pod の使用状況の統計情報を表示するには、
--selector=''ラベルを追加します。フィルタリングするラベルクエリー (=、==、!=など) を選択する必要があることに注意してください。以下に例を示します。$ oc adm top pod --selector='<pod_name>'
2.2.3. リソースログの表示
OpenShift CLI (oc) または Web コンソールでリソースのログを表示できます。デフォルトでは、ログは最後 (または末尾) から表示されます。リソースのログを表示すると、問題のトラブルシューティングやリソースの動作の監視に役立ちます。
2.2.3.1. Web コンソールを使用してリソースログを表示する
Red Hat OpenShift Service on AWS Web コンソールを使用してリソースログを表示するには、次の手順を使用します。
手順
Red Hat OpenShift Service on AWS コンソールで Workloads → Pods に移動するか、調査するリソースから Pod に移動します。
注記ビルドなどの一部のリソースには、直接クエリーする Pod がありません。このような場合は、リソースの Details ページで Logs リンクを特定できます。
- ドロップダウンメニューからプロジェクトを選択します。
- 調査する Pod の名前をクリックします。
- Logs をクリックします。
2.2.3.2. CLI を使用してリソースログを表示する
コマンドラインインターフェイス (CLI) を使用してリソースログを表示するには、次の手順を使用します。
前提条件
-
OpenShift CLI (
oc) へのアクセスがある。
手順
次のコマンドを入力して、特定の Pod のログを表示します。
$ oc logs -f <pod_name> -c <container_name>ここでは、以下のようになります。
-f- オプション: ログに書き込まれている内容に沿って出力することを指定します。
<pod_name>- Pod の名前を指定します。
<container_name>- オプション: コンテナーの名前を指定します。Pod に複数のコンテナーがある場合は、コンテナー名を指定する必要があります。
以下に例を示します。
$ oc logs -f ruby-57f7f4855b-znl92 -c ruby次のコマンドを入力して、特定のリソースのログを表示します。
$ oc logs <object_type>/<resource_name>以下に例を示します。
$ oc logs deployment/ruby
2.3. Pod 用の Red Hat OpenShift Service on AWS の設定
管理者として、Pod に対して効率的なクラスターを作成し、維持することができます。
クラスターの効率性を維持することにより、1 回のみ実行するように設計された Pod をいつ再起動するか、Pod が利用できる帯域幅をいつ制限するか、中断時に Pod をどのように実行させ続けるかなど、Pod が終了するときの動作をツールとして使用して必要な数の Pod が常に実行されるようにし、開発者により良い環境を提供することができます。
2.3.1. 再起動後の Pod の動作方法の設定
Pod 再起動ポリシーは、Pod のコンテナーの終了時に Red Hat OpenShift Service on AWS が応答する方法を決定します。このポリシーは Pod のすべてのコンテナーに適用されます。
以下の値を使用できます。
-
Always- Pod で正常に終了したコンテナーの再起動を継続的に試みます。指数関数的なバックオフ遅延 (10 秒、20 秒、40 秒) は 5 分に制限されています。デフォルトはAlwaysです。 -
OnFailure: Pod で失敗したコンテナーの継続的な再起動を、5 分を上限として指数関数のバックオフ遅延 (10 秒、20 秒、40 秒) で試行します。 -
Never: Pod で終了したコンテナーまたは失敗したコンテナーの再起動を試行しません。Pod はただちに失敗し、終了します。
いったんノードにバインドされた Pod は別のノードにはバインドされなくなります。これは、Pod がノードの失敗後も存続するにはコントローラーが必要であることを示しています。
| 条件 | コントローラーのタイプ | 再起動ポリシー |
|---|---|---|
| 終了することが期待される Pod (バッチ計算など) | ジョブ |
|
| 終了しないことが期待される Pod (Web サーバーなど) | レプリケーションコントローラー |
|
| マシンごとに 1 回実行される Pod | デーモンセット | すべて |
Pod のコンテナーが失敗し、再起動ポリシーが OnFailure に設定される場合、Pod はノード上に留まり、コンテナーが再起動します。コンテナーを再起動させない場合には、再起動ポリシーの Never を使用します。
Pod 全体に障害が発生した場合、Red Hat OpenShift Service on AWS は新しい Pod を起動します。開発者は、アプリケーションが新規 Pod で再起動される可能性に対応しなくてはなりません。とくに、アプリケーションは、一時的なファイル、ロック、以前の実行で生じた未完成の出力などを処理する必要があります。
Kubernetes アーキテクチャーでは、クラウドプロバイダーからの信頼性のあるエンドポイントが必要です。クラウドプロバイダーが停止している場合、kubelet により Red Hat OpenShift Service on AWS の再起動が阻止されます。
基礎となるクラウドプロバイダーのエンドポイントに信頼性がない場合は、クラウドプロバイダー統合を使用してクラスターをインストールしないでください。クラスターを、非クラウド環境で実行する場合のようにインストールします。インストール済みのクラスターで、クラウドプロバイダー統合をオンまたはオフに切り替えることは推奨されていません。
Red Hat OpenShift Service on AWS が失敗したコンテナーに再起動ポリシーを使用する方法の詳細は、Kubernetes ドキュメントの Example States を参照してください。
2.3.2. Pod で利用可能な帯域幅の制限
Quality-of-Service (QoS) トラフィックシェーピングを Pod に適用し、その利用可能な帯域幅を効果的に制限することができます。(Pod からの) Egress トラフィックは、設定したレートを超えるパケットを単純にドロップするポリシングによって処理されます。(Pod への) Ingress トラフィックは、データを効果的に処理できるようシェーピングでパケットをキューに入れて処理されます。Pod に設定する制限は、他の Pod の帯域幅には影響を与えません。
手順
Pod の帯域幅を制限するには、以下を実行します。
オブジェクト定義 JSON ファイルを作成し、
kubernetes.io/ingress-bandwidthおよびkubernetes.io/egress-bandwidthアノテーションを使用してデータトラフィックの速度を指定します。たとえば、Pod の egress および ingress の両方の帯域幅を 10M/s に制限するには、以下を実行します。制限が設定された
Podオブジェクト定義{ "kind": "Pod", "spec": { "containers": [ { "image": "openshift/hello-openshift", "name": "hello-openshift" } ] }, "apiVersion": "v1", "metadata": { "name": "iperf-slow", "annotations": { "kubernetes.io/ingress-bandwidth": "10M", "kubernetes.io/egress-bandwidth": "10M" } } }オブジェクト定義を使用して Pod を作成します。
$ oc create -f <file_or_dir_path>
2.3.3. 起動している必要がある Pod の数を Pod Disruption Budget を使用して指定する方法について
Pod Disruption Budget を使用すると、メンテナンスのためにノードの drain (Pod の退避) を実行するなど、運用中の Pod に対して安全上の制約を指定できます。
PodDisruptionBudget は、同時に起動している必要のあるレプリカの最小数またはパーセンテージを指定する API オブジェクトです。これらをプロジェクトに設定することは、ノードのメンテナンス (クラスターのスケールダウンまたはクラスターのアップグレードなどの実行) 時に役立ち、この設定は (ノードの障害時ではなく) 自発的な退避の場合にのみ許可されます。
PodDisruptionBudget オブジェクトの設定は、次の主要な部分で構成されます。
- 一連の Pod に対するラベルのクエリー機能であるラベルセレクター。
同時に利用可能にする必要のある Pod の最小数を指定する可用性レベル。
-
minAvailableは、中断時にも常に利用可能である必要のある Pod 数です。 -
maxUnavailableは、中断時に利用不可にできる Pod 数です。
-
Available は、Ready=True の状態にある Pod 数を指します。Ready=True は、要求に対応でき、一致するすべてのサービスの負荷分散プールに追加する必要がある Pod を指します。
maxUnavailable の 0% または 0 あるいは minAvailable の 100%、ないしはレプリカ数に等しい値は許可されますが、これによりノードが drain されないようにブロックされる可能性があります。
Red Hat OpenShift Service on AWS のすべてのマシン設定プールにおける maxUnavailable のデフォルト設定は 1 です。この値を変更せず、一度に 1 つのコントロールプレーンノードを更新することを推奨します。コントロールプレーンプールのこの値を 3 に変更しないでください。
以下を実行して、Pod の Disruption Budget をすべてのプロジェクトで確認することができます。
$ oc get poddisruptionbudget --all-namespaces以下の例には、Red Hat OpenShift Service on AWS に固有の値がいくつか含まれています。
出力例
NAMESPACE NAME MIN AVAILABLE MAX UNAVAILABLE ALLOWED DISRUPTIONS AGE
openshift-apiserver openshift-apiserver-pdb N/A 1 1 121m
openshift-cloud-controller-manager aws-cloud-controller-manager 1 N/A 1 125m
openshift-cloud-credential-operator pod-identity-webhook 1 N/A 1 117m
openshift-cluster-csi-drivers aws-ebs-csi-driver-controller-pdb N/A 1 1 121m
openshift-cluster-storage-operator csi-snapshot-controller-pdb N/A 1 1 122m
openshift-cluster-storage-operator csi-snapshot-webhook-pdb N/A 1 1 122m
openshift-console console N/A 1 1 116m
#...
PodDisruptionBudget は、最低でも minAvailable Pod がシステムで実行されている場合は正常であるとみなされます。この制限を超えるすべての Pod は退避の対象となります。
Pod の優先度とプリエンプションの設定によっては、Pod Disruption Budget の要件にもかかわらず、優先度の低い Pod が削除される可能性があります。
2.3.3.1. 起動している必要がある Pod の数を Pod Disruption Budget を使用して指定する
同時に起動している必要のあるレプリカの最小数またはパーセンテージは、PodDisruptionBudget オブジェクトを使用して指定します。
手順
Pod Disruption Budget を設定するには、次の手順を実行します。
YAML ファイルを以下のようなオブジェクト定義で作成します。
apiVersion: policy/v11 kind: PodDisruptionBudget metadata: name: my-pdb spec: minAvailable: 22 selector:3 matchLabels: name: my-podまたは、以下を実行します。
apiVersion: policy/v11 kind: PodDisruptionBudget metadata: name: my-pdb spec: maxUnavailable: 25%2 selector:3 matchLabels: name: my-pod以下のコマンドを実行してオブジェクトをプロジェクトに追加します。
$ oc create -f </path/to/file> -n <project_name>
2.5. 設定マップの作成および使用
以下のセクションでは、設定マップおよびそれらを作成し、使用する方法を定義します。
2.5.1. 設定マップについて
多くのアプリケーションには、設定ファイル、コマンドライン引数、および環境変数の組み合わせを使用した設定が必要です。Red Hat OpenShift Service on AWS では、これらの設定アーティファクトは、コンテナー化されたアプリケーションを移植可能な状態に保つためにイメージコンテンツから切り離されます。
ConfigMap オブジェクトは、コンテナーを Red Hat OpenShift Service on AWS に依存させないようにする一方で、コンテナーに設定データを注入するメカニズムを提供します。設定マップは、個々のプロパティーなどの粒度の細かい情報や、設定ファイル全体または JSON Blob などの粒度の荒い情報を保存するために使用できます。
ConfigMap オブジェクトは、Pod で使用したり、コントローラーなどのシステムコンポーネントの設定データを保存するために使用できる設定データのキーと値のペアを保持します。以下に例を示します。
ConfigMap オブジェクト定義
kind: ConfigMap
apiVersion: v1
metadata:
creationTimestamp: 2016-02-18T19:14:38Z
name: example-config
namespace: my-namespace
data:
example.property.1: hello
example.property.2: world
example.property.file: |-
property.1=value-1
property.2=value-2
property.3=value-3
binaryData:
bar: L3Jvb3QvMTAw
イメージなどのバイナリーファイルから設定マップを作成する場合に、binaryData フィールドを使用できます。
設定データはさまざまな方法で Pod 内で使用できます。設定マップは以下を実行するために使用できます。
- コンテナーへの環境変数値の設定
- コンテナーのコマンドライン引数の設定
- ボリュームの設定ファイルの設定
ユーザーとシステムコンポーネントの両方が設定データを設定マップに保存できます。
設定マップはシークレットに似ていますが、機密情報を含まない文字列の使用をより効果的にサポートするように設計されています。
2.5.1.1. 設定マップの制限
設定マップは、コンテンツを Pod で使用される前に作成する必要があります。
コントローラーは、設定データが不足していても、その状況を許容して作成できます。ケースごとに設定マップを使用して設定される個々のコンポーネントを参照してください。
ConfigMap オブジェクトはプロジェクト内にあります。
それらは同じプロジェクトの Pod によってのみ参照されます。
Kubelet は、API サーバーから取得する Pod の設定マップの使用のみをサポートします。
これには、CLI を使用して作成された Pod、またはレプリケーションコントローラーから間接的に作成された Pod が含まれます。これには、Red Hat OpenShift Service on AWS ノードの --manifest-url フラグ、--config フラグ、REST API を使用して作成された Pod は含まれません。これらは Pod を作成する一般的な方法ではないためです。
2.5.2. Red Hat OpenShift Service on AWS Web コンソールでの config map の作成
Red Hat OpenShift Service on AWS Web コンソールで config map を作成できます。
手順
クラスター管理者として設定マップを作成するには、以下を実行します。
-
Administrator パースペクティブで
Workloads→Config Mapsを選択します。 - ページの右上にある Create Config Map を選択します。
- 設定マップの内容を入力します。
- Create を選択します。
-
Administrator パースペクティブで
開発者として設定マップを作成するには、以下を実行します。
-
開発者パースペクティブで、
Config Mapsを選択します。 - ページの右上にある Create Config Map を選択します。
- 設定マップの内容を入力します。
- Create を選択します。
-
開発者パースペクティブで、
2.5.3. CLI を使用して設定マップを作成する
以下のコマンドを使用して、ディレクトリー、特定のファイルまたはリテラル値から設定マップを作成できます。
手順
設定マップの作成
$ oc create configmap <configmap_name> [options]
2.5.3.1. ディレクトリーからの設定マップの作成
--from-file フラグを使用すると、ディレクトリーから config map を作成できます。この方法では、ディレクトリー内の複数のファイルを使用して設定マップを作成できます。
ディレクトリー内の各ファイルは、config map にキーを設定するために使用されます。キーの名前はファイル名で、キーの値はファイルの内容です。
たとえば、次のコマンドは、example-files ディレクトリーの内容を使用して config map を作成します。
$ oc create configmap game-config --from-file=example-files/config map 内のキーを表示します。
$ oc describe configmaps game-config出力例
Name: game-config
Namespace: default
Labels: <none>
Annotations: <none>
Data
game.properties: 158 bytes
ui.properties: 83 bytes
マップにある 2 つのキーが、コマンドで指定されたディレクトリーのファイル名に基づいて作成されていることに気づかれることでしょう。これらのキーの内容は大きい可能性があるため、oc describe の出力にはキーの名前とそのサイズのみが表示されます。
前提条件
config map に追加するデータを含むファイルを含むディレクトリーが必要です。
次の手順では、サンプルファイル
game.propertiesおよびui.propertiesを使用します。$ cat example-files/game.properties出力例
enemies=aliens lives=3 enemies.cheat=true enemies.cheat.level=noGoodRotten secret.code.passphrase=UUDDLRLRBABAS secret.code.allowed=true secret.code.lives=30$ cat example-files/ui.properties出力例
color.good=purple color.bad=yellow allow.textmode=true how.nice.to.look=fairlyNice
手順
次のコマンドを入力して、このディレクトリー内の各ファイルの内容を保持する設定マップを作成します。
$ oc create configmap game-config \ --from-file=example-files/
検証
-oオプションを使用してオブジェクトのoc getコマンドを入力し、キーの値を表示します。$ oc get configmaps game-config -o yaml出力例
apiVersion: v1 data: game.properties: |- enemies=aliens lives=3 enemies.cheat=true enemies.cheat.level=noGoodRotten secret.code.passphrase=UUDDLRLRBABAS secret.code.allowed=true secret.code.lives=30 ui.properties: | color.good=purple color.bad=yellow allow.textmode=true how.nice.to.look=fairlyNice kind: ConfigMap metadata: creationTimestamp: 2016-02-18T18:34:05Z name: game-config namespace: default resourceVersion: "407" selflink: /api/v1/namespaces/default/configmaps/game-config uid: 30944725-d66e-11e5-8cd0-68f728db1985
2.5.3.2. ファイルから設定マップを作成する
--from-file フラグを使用すると、ファイルから config map を作成できます。--from-file オプションを CLI に複数回渡すことができます。
key=value 式を --from-file オプションに渡すことで、ファイルからインポートされたコンテンツの config map に設定するキーを指定することもできます。以下に例を示します。
$ oc create configmap game-config-3 --from-file=game-special-key=example-files/game.properties
ファイルから設定マップを作成する場合、UTF8 以外のデータを破損することなく、UTF8 以外のデータを含むファイルをこの新規フィールドに配置できます。Red Hat OpenShift Service on AWS はバイナリーファイルを検出し、ファイルを MIME として透過的にエンコーディングします。サーバーでは、データを破損することなく MIME ペイロードがデコーディングされ、保存されます。
前提条件
config map に追加するデータを含むファイルを含むディレクトリーが必要です。
次の手順では、サンプルファイル
game.propertiesおよびui.propertiesを使用します。$ cat example-files/game.properties出力例
enemies=aliens lives=3 enemies.cheat=true enemies.cheat.level=noGoodRotten secret.code.passphrase=UUDDLRLRBABAS secret.code.allowed=true secret.code.lives=30$ cat example-files/ui.properties出力例
color.good=purple color.bad=yellow allow.textmode=true how.nice.to.look=fairlyNice
手順
特定のファイルを指定して設定マップを作成します。
$ oc create configmap game-config-2 \ --from-file=example-files/game.properties \ --from-file=example-files/ui.propertiesキーと値のペアを指定して、設定マップを作成します。
$ oc create configmap game-config-3 \ --from-file=game-special-key=example-files/game.properties
検証
-oオプションを使用してオブジェクトのoc getコマンドを入力し、ファイルからキーの値を表示します。$ oc get configmaps game-config-2 -o yaml出力例
apiVersion: v1 data: game.properties: |- enemies=aliens lives=3 enemies.cheat=true enemies.cheat.level=noGoodRotten secret.code.passphrase=UUDDLRLRBABAS secret.code.allowed=true secret.code.lives=30 ui.properties: | color.good=purple color.bad=yellow allow.textmode=true how.nice.to.look=fairlyNice kind: ConfigMap metadata: creationTimestamp: 2016-02-18T18:52:05Z name: game-config-2 namespace: default resourceVersion: "516" selflink: /api/v1/namespaces/default/configmaps/game-config-2 uid: b4952dc3-d670-11e5-8cd0-68f728db1985-oオプションを使用してオブジェクトのoc getコマンドを入力し、key-value (キー/値) ペアからキーの値を表示します。$ oc get configmaps game-config-3 -o yaml出力例
apiVersion: v1 data: game-special-key: |-1 enemies=aliens lives=3 enemies.cheat=true enemies.cheat.level=noGoodRotten secret.code.passphrase=UUDDLRLRBABAS secret.code.allowed=true secret.code.lives=30 kind: ConfigMap metadata: creationTimestamp: 2016-02-18T18:54:22Z name: game-config-3 namespace: default resourceVersion: "530" selflink: /api/v1/namespaces/default/configmaps/game-config-3 uid: 05f8da22-d671-11e5-8cd0-68f728db1985- 1
- これは、先の手順で設定したキーです。
2.5.3.3. リテラル値からの設定マップの作成
設定マップにリテラル値を指定することができます。
--from-literal オプションは、リテラル値をコマンドラインに直接指定できる key=value 構文を取ります。
手順
リテラル値を指定して設定マップを作成します。
$ oc create configmap special-config \ --from-literal=special.how=very \ --from-literal=special.type=charm
検証
-oオプションを使用してオブジェクトのoc getコマンドを入力し、キーの値を表示します。$ oc get configmaps special-config -o yaml出力例
apiVersion: v1 data: special.how: very special.type: charm kind: ConfigMap metadata: creationTimestamp: 2016-02-18T19:14:38Z name: special-config namespace: default resourceVersion: "651" selflink: /api/v1/namespaces/default/configmaps/special-config uid: dadce046-d673-11e5-8cd0-68f728db1985
2.5.4. ユースケース: Pod で設定マップを使用する
以下のセクションでは、Pod で ConfigMap オブジェクトを使用する際のいくつかのユースケースを説明します。
2.5.4.1. 設定マップの使用によるコンテナーでの環境変数の設定
config map を使用して、コンテナーで個別の環境変数を設定するために使用したり、有効な環境変数名を生成するすべてのキーを使用してコンテナーで環境変数を設定するために使用したりすることができます。
例として、以下の設定マップを見てみましょう。
2 つの環境変数を含む ConfigMap
apiVersion: v1
kind: ConfigMap
metadata:
name: special-config
namespace: default
data:
special.how: very
special.type: charm 1 つの環境変数を含む ConfigMap
apiVersion: v1
kind: ConfigMap
metadata:
name: env-config
namespace: default
data:
log_level: INFO 手順
configMapKeyRefセクションを使用して、Pod のこのConfigMapのキーを使用できます。特定の環境変数を注入するように設定されている
Pod仕様のサンプルapiVersion: v1 kind: Pod metadata: name: dapi-test-pod spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: test-container image: gcr.io/google_containers/busybox command: [ "/bin/sh", "-c", "env" ] env:1 - name: SPECIAL_LEVEL_KEY2 valueFrom: configMapKeyRef: name: special-config3 key: special.how4 - name: SPECIAL_TYPE_KEY valueFrom: configMapKeyRef: name: special-config5 key: special.type6 optional: true7 envFrom:8 - configMapRef: name: env-config9 securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] restartPolicy: Neverこの Pod が実行されると、Pod のログには以下の出力が含まれます。
SPECIAL_LEVEL_KEY=very log_level=INFO
SPECIAL_TYPE_KEY=charm は出力例にリスト表示されません。optional: true が設定されているためです。
2.5.4.2. 設定マップを使用したコンテナーコマンドのコマンドライン引数の設定
config map を使用すると、Kubernetes 置換構文 $(VAR_NAME) を使用してコンテナー内のコマンドまたは引数の値を設定できます。
例として、以下の設定マップを見てみましょう。
apiVersion: v1
kind: ConfigMap
metadata:
name: special-config
namespace: default
data:
special.how: very
special.type: charm手順
コンテナー内のコマンドに値を注入するには、環境変数として使用するキーを使用する必要があります。次に、
$(VAR_NAME)構文を使用してコンテナーのコマンドでそれらを参照することができます。特定の環境変数を注入するように設定されている Pod 仕様のサンプル
apiVersion: v1 kind: Pod metadata: name: dapi-test-pod spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: test-container image: gcr.io/google_containers/busybox command: [ "/bin/sh", "-c", "echo $(SPECIAL_LEVEL_KEY) $(SPECIAL_TYPE_KEY)" ]1 env: - name: SPECIAL_LEVEL_KEY valueFrom: configMapKeyRef: name: special-config key: special.how - name: SPECIAL_TYPE_KEY valueFrom: configMapKeyRef: name: special-config key: special.type securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] restartPolicy: Never- 1
- 環境変数として使用するキーを使用して、コンテナーのコマンドに値を挿入します。
この Pod が実行されると、test-container コンテナーで実行される echo コマンドの出力は以下のようになります。
very charm
2.5.4.3. 設定マップの使用によるボリュームへのコンテンツの挿入
config map を使用して、コンテンツをボリュームに注入することができます。
ConfigMap カスタムリソース (CR) の例
apiVersion: v1
kind: ConfigMap
metadata:
name: special-config
namespace: default
data:
special.how: very
special.type: charm手順
config map を使用してコンテンツをボリュームに注入するには、2 つの異なるオプションを使用できます。
config map を使用してコンテンツをボリュームに注入するための最も基本的な方法は、キーがファイル名であり、ファイルの内容がキーの値になっているファイルでボリュームを設定する方法です。
apiVersion: v1 kind: Pod metadata: name: dapi-test-pod spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: test-container image: gcr.io/google_containers/busybox command: [ "/bin/sh", "-c", "cat", "/etc/config/special.how" ] volumeMounts: - name: config-volume mountPath: /etc/config securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] volumes: - name: config-volume configMap: name: special-config1 restartPolicy: Never- 1
- キーを含むファイル。
この Pod が実行されると、cat コマンドの出力は以下のようになります。
very設定マップキーが投影されるボリューム内のパスを制御することもできます。
apiVersion: v1 kind: Pod metadata: name: dapi-test-pod spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: test-container image: gcr.io/google_containers/busybox command: [ "/bin/sh", "-c", "cat", "/etc/config/path/to/special-key" ] volumeMounts: - name: config-volume mountPath: /etc/config securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] volumes: - name: config-volume configMap: name: special-config items: - key: special.how path: path/to/special-key1 restartPolicy: Never- 1
- 設定マップキーへのパス。
この Pod が実行されると、cat コマンドの出力は以下のようになります。
very
2.6. Pod スケジューリングの決定に Pod の優先順位を含める
クラスターで Pod の優先順位およびプリエンプションを有効にできます。Pod の優先度は、他の Pod との比較した Pod の重要度を示し、その優先度に基づいて Pod をキューに入れます。Pod のプリエンプションは、クラスターが優先順位の低い Pod の退避またはプリエンプションを実行することを可能にするため、適切なノードに利用可能な領域がない場合に優先順位のより高い Pod をスケジュールできます。Pod の優先順位は Pod のスケジューリングの順序にも影響を与え、リソース不足の場合のノード上での退避の順序に影響を与えます。
優先順位とプリエンプションを使用するには、Pod 仕様の優先順位クラスを参照して、その重みをスケジューリングに適用します。
2.6.1. Pod の優先順位について
Pod の優先順位およびプリエンプション機能を使用する場合、スケジューラーは優先順位に基づいて保留中の Pod を順序付け、保留中の Pod はスケジューリングのキューで優先順位のより低い他の保留中の Pod よりも前に置かれます。その結果、より優先順位の高い Pod は、スケジューリングの要件を満たす場合に優先順位の低い Pod よりも早くスケジュールされる可能性があります。Pod をスケジュールできない場合、スケジューラーは引き続き他の優先順位の低い Pod をスケジュールします。
2.6.1.1. Pod の優先順位クラス
Pod には優先順位クラスを割り当てることができます。これは、名前から優先順位の整数値へのマッピングを定義する namespace を使用していないオブジェクトです。値が高いと優先順位が高くなります。
優先順位およびプリエンプションは、1000000000 (10 億) 以下の 32 ビットの整数値を取ることができます。プリエンプションや退避を実行すべきでない Critical Pod 用に 10 億以上の数値を予約する必要があります。デフォルトで、Red Hat OpenShift Service on AWS には予約済みの優先順位クラスが 2 つあります。これらのクラスは、重要なシステム Pod のスケジューリングを保証するために使用されます。
$ oc get priorityclasses出力例
NAME VALUE GLOBAL-DEFAULT AGE
system-node-critical 2000001000 false 72m
system-cluster-critical 2000000000 false 72m
openshift-user-critical 1000000000 false 3d13h
cluster-logging 1000000 false 29ssystem-node-critical: この優先順位クラスには 2000001000 の値があり、ノードから退避すべきでないすべての Pod に使用されます。この優先順位クラスを持つ Pod の例としては、
ovnkube-nodeなどがあります。数多くの重要なコンポーネントには、デフォルトでsystem-node-criticalの優先順位クラスが含まれます。以下は例になります。- master-api
- master-controller
- master-etcd
- ovn-kubernetes
- sync
system-cluster-critical: この優先順位クラスには 2000000000 (20 億) の値があり、クラスターに重要な Pod に使用されます。この優先順位クラスの Pod は特定の状況でノードから退避される可能性があります。たとえば、
system-node-critical優先順位クラスで設定される Pod が優先される可能性があります。この場合でも、この優先順位クラスではスケジューリングが保証されます。この優先順位クラスを持つ可能性のある Pod の例として、fluentd、descheduler などのアドオンコンポーネントなどがあります。数多くの重要なコンポーネントには、デフォルトでsystem-cluster-critical優先順位クラスが含まれます。以下はその一例です。- fluentd
- metrics-server
- descheduler
-
openshift-user-critical:
priorityClassNameフィールドを、リソース消費をバインドできず、予測可能なリソース消費動作がない重要な Pod で使用できます。openshift-monitoringおよびopenshift-user-workload-monitoringnamespace 下にある Prometheus Pod は、openshift-user-criticalpriorityClassNameを使用します。モニタリングのワークロードはsystem-criticalを最初のpriorityClassとして使用しますが、これにより、モニタリング時にメモリーが過剰に使用され、ノードが退避できない問題が発生します。その結果、モニタリングの優先順位が下がり、スケジューラーに柔軟性が与えられ、重要なノードの動作を維持するために重いワークロード発生します。 - cluster-logging: この優先順位は、Fluentd Pod が他のアプリケーションより優先してノードにスケジュールされるようにするために Fluentd で使用されます。
2.6.1.2. Pod の優先順位名
1 つ以上の優先順位クラスを準備した後に、Pod 仕様に優先順位クラス名を指定する Pod を作成できます。優先順位のアドミッションコントローラーは、優先順位クラス名フィールドを使用して優先順位の整数値を設定します。名前付きの優先順位クラスが見つからない場合、Pod は拒否されます。
2.6.2. Pod のプリエンプションについて
開発者が Pod を作成する場合、Pod はキューに入れられます。開発者が Pod の優先順位またはプリエンプションを設定している場合、スケジューラーはキューから Pod を選択し、Pod をノードにスケジュールしようとします。スケジューラーが Pod に指定されたすべての要件を満たす適切なノードに領域を見つけられない場合、プリエンプションロジックが保留中の Pod にトリガーされます。
スケジューラーがノードで 1 つ以上の Pod のプリエンプションを実行する場合、優先順位の高い Pod 仕様の nominatedNodeName フィールドは、nodename フィールドと共にノードの名前に設定されます。スケジューラーは nominatedNodeName フィールドを使用して Pod の予約されたリソースを追跡し、またクラスターのプリエンプションに関する情報をユーザーに提供します。
スケジューラーが優先順位の低い Pod のプリエンプションを実行した後に、スケジューラーは Pod のグレースフルな終了期間を許可します。スケジューラーが優先順位の低い Pod の終了を待機する間に別のノードが利用可能になると、スケジューラーはそのノードに優先順位の高い Pod をスケジュールできます。その結果、Pod 仕様の nominatedNodeName フィールドおよび nodeName フィールドが異なる可能性があります。
さらに、スケジューラーがノード上で Pod のプリエンプションを実行し、終了を待機している場合で、保留中の Pod よりも優先順位の高い Pod をスケジュールする必要がある場合、スケジューラーは代わりに優先順位の高い Pod をスケジュールできます。その場合、スケジューラーは保留中の Pod の nominatedNodeName をクリアし、その Pod を他のノードの対象とすることができます。
プリエンプションは、ノードから優先順位の低いすべての Pod を削除する訳ではありません。スケジューラーは、優先順位の低い Pod の一部を削除して保留中の Pod をスケジュールできます。
スケジューラーは、保留中の Pod をノードにスケジュールできる場合にのみ、Pod のプリエンプションを実行するノードを考慮します。
2.6.2.1. プリエンプションを実行しない優先順位クラス
プリエンプションポリシーが Never に設定された Pod は優先順位の低い Pod よりも前のスケジューリングキューに置かれますが、他の Pod のプリエンプションを実行することはできません。スケジュールを待機しているプリエンプションを実行しない Pod は、十分なリソースが解放され、これがスケジュールされるまでスケジュールキュー内に留まります。他の Pod などのプリエンプションを実行しない Pod はスケジューラーのバックオフの対象になります。つまり、スケジューラーがこれらの Pod のスケジュールの試行に成功しない場合、低頻度で再試行されるため、優先順位の低い他の Pod をそれらの Pod よりも前にスケジュールできます。
プリエンプションを実行しない Pod には、他の優先順位の高い Pod が依然としてプリエンプションを実行できます。
2.6.2.2. Pod プリエンプションおよび他のスケジューラーの設定
Pod の優先順位およびプリエンプションを有効にする場合、他のスケジューラー設定を考慮します。
- Pod の優先順位および Pod の Disruption Budget (停止状態の予算)
- Pod の Disruption Budget (停止状態の予算) は一度に稼働している必要のあるレプリカの最小数またはパーセンテージを指定します。Pod の Disruption Budget (停止状態の予算) を指定する場合、Red Hat OpenShift Service on AWS は、Best Effort レベルで Pod のプリエンプションを実行する際にそれらを適用します。スケジューラーは、Pod の Disruption Budget (停止状態の予算) に違反しない範囲で Pod のプリエンプションを試行します。該当する Pod が見つからない場合には、Pod の Disruption Budget (停止状態の予算) の要件を無視して優先順位の低い Pod のプリエンプションが実行される可能性があります。
- Pod の優先順位およびアフィニティー
- Pod のアフィニティーは、新規 Pod が同じラベルを持つ他の Pod と同じノードにスケジュールされることを要求します。
保留中の Pod にノード上の 1 つ以上の優先順位の低い Pod との Pod 間のアフィニティーがある場合、スケジューラーはアフィニティーの要件を違反せずに優先順位の低い Pod のプリエンプションを実行することはできません。この場合、スケジューラーは保留中の Pod をスケジュールするための別のノードを探します。ただし、スケジューラーが適切なノードを見つけることは保証できず、保留中の Pod がスケジュールされない可能性があります。
この状態を防ぐには、優先順位が等しい Pod との Pod のアフィニティーの設定を慎重に行ってください。
2.6.2.3. プリエンプションが実行された Pod の正常な終了
Pod のプリエンプションの実行中、スケジューラーは Pod のグレースフルな終了期間が期限切れになるのを待機します。その後、Pod は機能を完了し、終了します。Pod がこの期間後も終了しない場合、スケジューラーは Pod を強制終了します。このようにグレースフルな終了期間が原因で、スケジューラーによる Pod のプリエンプションの実行時と保留中の Pod のノードへのスケジュール時に時間差が出ます。
このギャップを最小限に抑えるには、優先度の低い Pod に対してグレースフルな終了期間を短く設定します。
2.6.3. 優先順位およびプリエンプションの設定
Pod 仕様で priorityClassName を使用して優先順位クラスオブジェクトを作成し、Pod を優先順位に関連付けることで、Pod の優先度およびプリエンプションを適用できます。
優先クラスを既存のスケジュール済み Pod に直接追加することはできません。
手順
優先順位およびプリエンプションを使用するようにクラスターを設定するには、以下を実行します。
次のような YAML ファイルを作成して、優先順位クラスの名前を含む Pod 仕様を定義します。
apiVersion: v1 kind: Pod metadata: name: nginx labels: env: test spec: containers: - name: nginx image: nginx imagePullPolicy: IfNotPresent priorityClassName: system-cluster-critical1 - 1
- この Pod で使用する優先順位クラスを指定します。
Pod を作成します。
$ oc create -f <file-name>.yaml優先順位の名前は Pod 設定または Pod テンプレートに直接追加できます。
2.7. ノードセレクターの使用による特定ノードへの Pod の配置
ノードセレクター は、キーと値のペアのマップを指定します。ルールは、ノード上のカスタムラベルと Pod で指定されたセレクターを使用して定義されます。
Pod がノードで実行する要件を満たすには、Pod はノードのラベルとして示されるキーと値のペアを持っている必要があります。
同じ Pod 設定でノードのアフィニティーとノードセレクターを使用している場合、以下の重要な考慮事項を参照してください。
2.7.1. ノードセレクターの使用による Pod 配置の制御
Pod でノードセレクターを使用し、ノードでラベルを使用して、Pod がスケジュールされる場所を制御できます。ノードセレクターを使用すると、Red Hat OpenShift Service on AWS は一致するラベルが含まれるノード上に Pod をスケジュールします。
ラベルをノード、コンピュートマシンセット、またはマシン設定に追加します。コンピュートマシンセットにラベルを追加すると、ノードまたはマシンが停止した場合に、新規ノードにそのラベルが追加されます。ノードまたはマシン設定に追加されるラベルは、ノードまたはマシンが停止すると維持されません。
ノードセレクターを既存 Pod に追加するには、ノードセレクターを ReplicaSet オブジェクト、DaemonSet オブジェクト、StatefulSet オブジェクト、Deployment オブジェクト、または DeploymentConfig オブジェクトなどの Pod の制御オブジェクトに追加します。制御オブジェクト下の既存 Pod は、一致するラベルを持つノードで再作成されます。新規 Pod を作成する場合、ノードセレクターを Pod 仕様に直接追加できます。Pod に制御オブジェクトがない場合は、Pod を削除し、Pod 仕様を編集して、Pod を再作成する必要があります。
ノードセレクターを既存のスケジュールされている Pod に直接追加することはできません。
前提条件
ノードセレクターを既存 Pod に追加するには、Pod の制御オブジェクトを判別します。たとえば、router-default-66d5cf9464-m2g75 Pod は router-default-66d5cf9464 レプリカセットによって制御されます。
$ oc describe pod router-default-66d5cf9464-7pwkc出力例
kind: Pod
apiVersion: v1
metadata:
# ...
Name: router-default-66d5cf9464-7pwkc
Namespace: openshift-ingress
# ...
Controlled By: ReplicaSet/router-default-66d5cf9464
# ...
Web コンソールでは、Pod YAML の ownerReferences に制御オブジェクトをリスト表示します。
apiVersion: v1
kind: Pod
metadata:
name: router-default-66d5cf9464-7pwkc
# ...
ownerReferences:
- apiVersion: apps/v1
kind: ReplicaSet
name: router-default-66d5cf9464
uid: d81dd094-da26-11e9-a48a-128e7edf0312
controller: true
blockOwnerDeletion: true
# ...手順
一致するノードセレクターを Pod に追加します。
ノードセレクターを既存 Pod および新規 Pod に追加するには、ノードセレクターを Pod の制御オブジェクトに追加します。
ラベルを含む
ReplicaSetオブジェクトのサンプルkind: ReplicaSet apiVersion: apps/v1 metadata: name: hello-node-6fbccf8d9 # ... spec: # ... template: metadata: creationTimestamp: null labels: ingresscontroller.operator.openshift.io/deployment-ingresscontroller: default pod-template-hash: 66d5cf9464 spec: nodeSelector: kubernetes.io/os: linux node-role.kubernetes.io/worker: '' type: user-node1 # ...- 1
- ノードセレクターを追加します。
ノードセレクターを特定の新規 Pod に追加するには、セレクターを
Podオブジェクトに直接追加します。ノードセレクターを持つ
Podオブジェクトの例apiVersion: v1 kind: Pod metadata: name: hello-node-6fbccf8d9 # ... spec: nodeSelector: region: east type: user-node # ...注記ノードセレクターを既存のスケジュールされている Pod に直接追加することはできません。
第3章 Custom Metrics Autoscaler Operator を使用した Pod の自動スケーリング
3.1. リリースノート
3.1.1. Custom Metrics Autoscaler Operator リリースノート
Red Hat OpenShift の Custom Metrics Autoscaler Operator のリリースノートでは、新機能および拡張機能、非推奨となった機能、および既知の問題を説明しています。
Custom Metrics Autoscaler Operator は、Kubernetes ベースの Event Driven Autoscaler (KEDA) を使用し、Red Hat OpenShift Service on AWS の Horizontal Pod Autoscaler (HPA) の上に構築されます。
Red Hat OpenShift の Custom Metrics Autoscaler Operator のロギングサブシステムは、インストール可能なコンポーネントとして提供され、コアの Red Hat OpenShift Service on AWS とは異なるリリースサイクルを備えています。Red Hat OpenShift Container Platform ライフサイクルポリシー はリリースの互換性を概説しています。
3.1.1.1. サポート対象バージョン
次の表は、Red Hat OpenShift Service on AWS の各バージョンの Custom Metrics Autoscaler Operator バージョンを定義しています。
| バージョン | Red Hat OpenShift Service on AWS のバージョン | 一般提供 |
|---|---|---|
| 2.17.2-2 | 4.20 | 一般提供 |
| 2.17.2-2 | 4.19 | 一般提供 |
| 2.17.2-2 | 4.18 | 一般提供 |
| 2.17.2-2 | 4.17 | 一般提供 |
| 2.17.2-2 | 4.16 | 一般提供 |
| 2.17.2-2 | 4.15 | 一般提供 |
| 2.17.2-2 | 4.14 | 一般提供 |
| 2.17.2-2 | 4.13 | 一般提供 |
| 2.17.2-2 | 4.12 | 一般提供 |
3.1.1.2. Custom Metrics Autoscaler Operator 2.17.2-2 リリースノート
発行日: 2025 年 10 月 21 日
この Custom Metrics Autoscaler Operator 2.17.2-2 リリースは、新しいベースイメージと Go コンパイラーを使用して、Custom Metrics Autoscaler Operator のバージョン 2.17.2 を再構築したものです。Custom Metrics Autoscaler Operator のコード変更はありません。Custom Metrics Autoscaler Operator に関しては、次のアドバイザリーが利用可能です。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの Kubernetes ベースの Event Driven Autoscaler (KEDA) を削除します。
3.1.2. Custom Metrics Autoscaler Operator の過去リリースに関するリリースノート
次のリリースノートは、以前の Custom Metrics Autoscaler Operator バージョンを対象としています。
現在のバージョンは、Custom Metrics Autoscaler Operator リリースノート を参照してください。
3.1.2.1. Custom Metrics Autoscaler Operator 2.17.2 リリースノート
発行日: 2025 年 9 月 25 日
Custom Metrics Autoscaler Operator 2.17.2 のこのリリースでは、Common Vulnerabilities and Exposures (CVE) に対処しています。Custom Metrics Autoscaler Operator に関しては、次のアドバイザリーが利用可能です。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの Kubernetes ベースの Event Driven Autoscaler (KEDA) を削除します。
3.1.2.1.1. 新機能および機能拡張
3.1.2.1.1.1. KEDA コントローラーはインストール中に自動的に作成される
Custom Metrics Autoscaler Operator をインストールすると、KEDA コントローラーが自動的に作成されるようになりました。以前は、KEDA コントローラーを手動で作成する必要がありました。必要に応じて、自動作成された KEDA コントローラーを編集できます。
3.1.2.1.1.2. Kubernetes ワークロードトリガーのサポート
Cluster Metrics Autoscaler Operator は、Kubernetes ワークロードトリガーを使用して、特定のラベルセレクターに一致する Pod の数に基づいて Pod をスケーリングできるようになりました。
3.1.2.1.1.3. バインドされたサービスアカウントトークンのサポート
Cluster Metrics Autoscaler Operator は、バインドされたサービスアカウントトークンをサポートするようになりました。これまで、Operator はレガシーサービスアカウントトークンのみをサポートしていましたが、セキュリティー上の理由から、バインドされたサービスアカウントトークンに段階的に移行しています。
3.1.2.1.2. バグ修正
- 以前は、KEDA コントローラーはボリュームマウントをサポートしていませんでした。その結果、Kafka スケーラーで Kerberos を使用できませんでした。この修正により、KEDA コントローラーはボリュームマウントをサポートするようになりました。(OCPBUGS-42559)
-
以前は、
keda-operatorデプロイメントオブジェクトログの KEDA バージョンで、Custom Metrics Autoscaler Operator が誤った KEDA バージョンに基づいていることが報告されていました。この修正により、正しい KEDA バージョンがログに報告されるようになりました。(OCPBUGS-58129)
3.1.2.2. Custom Metrics Autoscaler Operator 2.15.1-4 リリースノート
発行日: 2025 年 3 月 31 日
Custom Metrics Autoscaler Operator 2.15.1-4 のこのリリースでは、Common Vulnerabilities and Exposures (CVE) に対処しています。Custom Metrics Autoscaler Operator に関しては、次のアドバイザリーが利用可能です。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの Kubernetes ベースの Event Driven Autoscaler (KEDA) を削除します。
3.1.2.2.1. 新機能および機能拡張
3.1.2.2.1.1. CMA マルチアーキテクチャービルド
このバージョンの Custom Metrics Autoscaler Operator を使用すると、ARM64 Red Hat OpenShift Service on AWS クラスターに Operator をインストールして実行できるようになりました。
3.1.2.3. Custom Metrics Autoscaler Operator 2.14.1-467 リリースノート
この Custom Metrics Autoscaler Operator 2.14.1-467 リリースでは、Red Hat OpenShift Service on AWS クラスターで Operator を実行するための CVE とバグ修正が提供されます。RHSA-2024:7348 に関する次のアドバイザリーが利用可能です。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの Kubernetes ベースの Event Driven Autoscaler (KEDA) を削除します。
3.1.2.3.1. バグ修正
- 以前は、Custom Metrics Autoscaler Operator Pod のルートファイルシステムが書き込み可能でした。これは不要であり、セキュリティー上の問題を引き起こす可能性がありました。この更新により、Pod のルートファイルシステムが読み取り専用になり、潜在的なセキュリティー問題が解決されました。(OCPBUGS-37989)
3.1.2.4. Custom Metrics Autoscaler Operator 2.14.1-454 リリースノート
この Custom Metrics Autoscaler Operator 2.14.1-454 リリースでは、Red Hat OpenShift Service on AWS クラスターで Operator を実行するための CVE、新機能、およびバグ修正を使用できます。RHBA-2024:5865 に関する次のアドバイザリーが利用可能です。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの Kubernetes ベースの Event Driven Autoscaler (KEDA) を削除します。
3.1.2.4.1. 新機能および機能拡張
3.1.2.4.1.1. Custom Metrics Autoscaler Operator による Cron トリガーのサポート
Custom Metrics Autoscaler Operator が、Cron トリガーを使用して、時間単位のスケジュールに基づいて Pod をスケーリングできるようになりました。指定した時間枠が開始すると、Custom Metrics Autoscaler Operator が Pod を必要な数にスケーリングします。時間枠が終了すると、Operator は以前のレベルまでスケールダウンします。
詳細は、Cron トリガーについて を参照してください。
3.1.2.4.2. バグ修正
-
以前は、
KedaControllerカスタムリソースの監査設定パラメーターに変更を加えても、keda-metrics-server-audit-policyconfig map が更新されませんでした。その結果、Custom Metrics Autoscaler の初期デプロイ後に監査設定パラメーターを変更することができませんでした。この修正により、監査設定への変更が config map に適切に反映されるようになり、インストール後いつでも監査設定を変更できるようになりました。(OCPBUGS-32521)
3.1.2.5. Custom Metrics Autoscaler Operator 2.13.1 リリースノート
Custom Metrics Autoscaler Operator 2.13.1-421 のこのリリースでは、Red Hat OpenShift Service on AWS クラスターで Operator を実行するための新機能およびバグ修正が提供されます。RHBA-2024:4837 に関する次のアドバイザリーが利用可能です。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの Kubernetes ベースの Event Driven Autoscaler (KEDA) を削除します。
3.1.2.5.1. 新機能および機能拡張
3.1.2.5.1.1. Custom Metrics Autoscaler Operator によるカスタム証明書のサポート
Custom Metrics Autoscaler Operator は、カスタムサービス CA 証明書を使用して、外部 Kafka クラスターや外部 Prometheus サービスなどの TLS 対応メトリクスソースにセキュアに接続できるようになりました。デフォルトでは、Operator は自動生成されたサービス証明書を使用して、クラスター上のサービスにのみ接続します。KedaController オブジェクトには、config map を使用して外部サービスに接続するためのカスタムサーバー CA 証明書を読み込むことができる新しいフィールドがあります。
詳細は、Custom Metrics Autoscaler のカスタム CA 証明書 を参照してください。
3.1.2.5.2. バグ修正
-
以前は、
custom-metrics-autoscalerおよびcustom-metrics-autoscaler-adapterイメージにタイムゾーン情報がありませんでした。その結果、コントローラーがタイムゾーン情報を見つけられなかったため、cronトリガーを使用した scaled object は機能しなくなりました。この修正により、イメージビルドが更新され、タイムゾーン情報が含まれるようになりました。その結果、cronトリガーを含む scaled object が正常に機能するようになりました。cronトリガーを含む scaled object は、現在、カスタムメトリクスオートスケーラーではサポートされていません。(OCPBUGS-34018)
3.1.2.6. Custom Metrics Autoscaler Operator 2.12.1-394 リリースノート
Custom Metrics Autoscaler Operator 2.12.1-394 のこのリリースでは、Red Hat OpenShift Service on AWS クラスターで Operator を実行するためのバグ修正が提供されます。RHSA-2024:2901 には、次のアドバイザリーを利用できます。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの Kubernetes ベースの Event Driven Autoscaler (KEDA) を削除します。
3.1.2.6.1. バグ修正
-
以前は、
protojson.Unmarshal関数は、特定の形式の無効な JSON をアンマーシャリングするときに無限ループに入りました。この状態は、google.protobuf.Any値を含むメッセージにアンマーシャリングするとき、またはUnmarshalOptions.DiscardUnknownオプションが設定されているときに発生する可能性があります。このリリースではこの問題が修正されています。(OCPBUGS-30305) -
以前は、
Request.ParseMultipartFormメソッドを使用して明示的に、またはRequest.FormValue、Request.PostFormValue、Request.FormFileメソッドを使用して暗黙的にマルチパートフォームを解析する場合、解析されたフォームの合計サイズの制限は、消費されるメモリーには適用されませんでした。これによりメモリー不足が発生する可能性があります。この修正により、解析プロセスでは、単一のフォーム行を読み取る際に、フォーム行の最大サイズが正しく制限されるようになりました。(OCPBUGS-30360) -
以前は、一致するサブドメイン上または最初のドメインと完全に一致しないドメインへの HTTP リダイレクトに従う場合、HTTP クライアントは
AuthorizationやCookieなどの機密ヘッダーを転送しませんでした。たとえば、example.comからwww.example.comへのリダイレクトではAuthorizationヘッダーが転送されますが、www.example.orgへのリダイレクトではヘッダーは転送されません。このリリースではこの問題が修正されています。(OCPBUGS-30365) -
以前は、不明な公開鍵アルゴリズムを持つ証明書を含む証明書チェーンを検証すると、証明書検証プロセスがパニックに陥っていました。この状況は、
Config.ClientAuthパラメーターをVerifyClientCertIfGivenまたはRequireAndVerifyClientCert値に設定するすべての暗号化および Transport Layer Security (TLS) クライアントとサーバーに影響しました。デフォルトの動作では、TLS サーバーはクライアント証明書を検証しません。このリリースではこの問題が修正されています。(OCPBUGS-30370) -
以前は、
MarshalJSONメソッドから返されるエラーにユーザーが制御するデータが含まれている場合、攻撃者はそのデータを使用して HTML テンプレートパッケージのコンテキスト自動エスケープ動作を破ることができた可能性があります。この条件により、後続のアクションによってテンプレートに予期しないコンテンツが注入される可能性があります。このリリースではこの問題が修正されています。(OCPBUGS-30397) -
以前は、Go パッケージ
net/httpおよびgolang.org/x/net/http2では、HTTP/2 リクエストのCONTINUATIONフレームの数に制限がありませんでした。この状態により、CPU が過剰に消費される可能性があります。このリリースではこの問題が修正されています。(OCPBUGS-30894)
3.1.2.7. Custom Metrics Autoscaler Operator 2.12.1-384 リリースノート
Custom Metrics Autoscaler Operator 2.12.1-384 のこのリリースでは、Red Hat OpenShift Service on AWS クラスターで Operator を実行するためのバグ修正が提供されます。RHBA-2024:2043 に関する次のアドバイザリーが利用可能です。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの KEDA を削除します。
3.1.2.7.1. バグ修正
-
以前は、
custom-metrics-autoscalerおよびcustom-metrics-autoscaler-adapterイメージにタイムゾーン情報がありませんでした。その結果、コントローラーがタイムゾーン情報を見つけられなかったため、cronトリガーを使用した scaled object は機能しなくなりました。この修正により、イメージビルドが更新され、タイムゾーン情報が含まれるようになりました。その結果、cronトリガーを含む scaled object が正常に機能するようになりました。(OCPBUGS-32395)
3.1.2.8. Custom Metrics Autoscaler Operator 2.12.1-376 リリースノート
この Custom Metrics Autoscaler Operator 2.12.1-376 リリースでは、Red Hat OpenShift Service on AWS クラスターで Operator を実行するためのセキュリティー更新とバグ修正を使用できます。RHSA-2024:1812 には、次のアドバイザリーを利用できます。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの KEDA を削除します。
3.1.2.8.1. バグ修正
- 以前は、存在しない namespace などの無効な値が scaled object メタデータに指定されている場合、基盤となるスケーラークライアントはクライアント記述子を解放または終了できず、低速のメモリーリークが発生していました。この修正により、エラーが発生した場合に基礎となるクライアント記述子が適切に終了され、メモリーのリークが防止されます。(OCPBUGS-30145)
-
以前は、
keda-metrics-apiserverPod のServiceMonitorカスタムリソース (CR) が機能していませんでした。これは、CR がhttpという誤ったメトリクスポート名を参照していたためです。この修正により、ServiceMonitorCR が修正され、metricsの適切なポート名が参照されるようになります。その結果、Service Monitor が正常に機能します。(OCPBUGS-25806)
3.1.2.9. Custom Metrics Autoscaler Operator 2.11.2-322 リリースノート
この Custom Metrics Autoscaler Operator 2.11.2-322 リリースでは、Red Hat OpenShift Service on AWS クラスターで Operator を実行するためのセキュリティー更新とバグ修正を使用できます。RHSA-2023:6144 には、次のアドバイザリーを利用できます。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの KEDA を削除します。
3.1.2.9.1. バグ修正
- Custom Metrics Autoscaler Operator バージョン 3.11.2-311 は、Operator デプロイメントで必要なボリュームマウントなしにリリースされたため、Custom Metrics Autoscaler Operator Pod は 15 分ごとに再起動しました。この修正により、必要なボリュームマウントが Operator デプロイメントに追加されました。その結果、Operator は 15 分ごとに再起動しなくなりました。(OCPBUGS-22361)
3.1.2.10. Custom Metrics Autoscaler Operator 2.11.2-311 リリースノート
この Custom Metrics Autoscaler Operator 2.11.2-311 リリースでは、Red Hat OpenShift Service on AWS クラスターで Operator を実行するための新機能とバグ修正を使用できます。Custom Metrics Autoscaler Operator 2.11.2-311 のコンポーネントは RHBA-2023:5981 でリリースされました。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの KEDA を削除します。
3.1.2.10.1. 新機能および機能拡張
3.1.2.10.1.1. Red Hat OpenShift Service on AWS と OpenShift Dedicated がサポートされるようになる
Custom Metrics Autoscaler Operator 2.11.2-311 は、Red Hat OpenShift Service on AWS および OpenShift Dedicated マネージドクラスターにインストールできます。Custom Metrics Autoscaler Operator の以前のバージョンは、openshift-keda namespace にのみインストールできました。これにより、Operator を Red Hat OpenShift Service on AWS および OpenShift Dedicated クラスターにインストールできませんでした。このバージョンの Custom Metrics Autoscaler では、openshift-operators または keda などの他の namespace へのインストールが可能になり、Red Hat OpenShift Service on AWS および OpenShift Dedicated クラスターへのインストールが可能になります。
3.1.2.10.2. バグ修正
-
以前は、Custom Metrics Autoscaler Operator がインストールおよび設定されているが使用されていない場合、OpenShift CLI では、
ocコマンドを入力すると、couldn’t get resource list for external.metrics.k8s.io/v1beta1: Got empty response for: external.metrics.k8s.io/v1beta1エラーが報告されていました。このメッセージは無害ではありますが、混乱を引き起こす可能性がありました。この修正により、Got empty response for: external.metrics…エラーが不適切に表示されなくなりました。(OCPBUGS-15779) - 以前は、設定変更後など、Keda Controller が変更されるたびに、Custom Metrics Autoscaler Operator によって管理されるオブジェクトに対するアノテーションやラベルの変更は、Custom Metrics Autoscaler Operator によって元に戻されました。これにより、オブジェクト内のラベルが継続的に変更されてしまいました。Custom Metrics Autoscaler は、独自のアノテーションを使用してラベルとアノテーションを管理するようになり、アノテーションやラベルが不適切に元に戻されることがなくなりました。(OCPBUGS-15590)
3.1.2.11. Custom Metrics Autoscaler Operator 2.10.1-267 リリースノート
この Custom Metrics Autoscaler Operator 2.10.1-267 リリースでは、Red Hat OpenShift Service on AWS クラスターで Operator を実行するための新機能とバグ修正を使用できます。Custom Metrics Autoscaler Operator 2.10.1-267 のコンポーネントは RHBA-2023:4089 でリリースされました。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの KEDA を削除します。
3.1.2.11.1. バグ修正
-
以前は、
custom-metrics-autoscalerイメージとcustom-metrics-autoscaler-adapterイメージにはタイムゾーン情報が含まれていませんでした。そのため、コントローラーがタイムゾーン情報を検出できないことが原因で、cron トリガーを使用した scaled object が機能していませんでした。今回の修正により、イメージビルドにタイムゾーン情報が含まれるようになりました。その結果、cron トリガーを含む scaled object が正常に機能するようになりました。(OCPBUGS-15264) -
以前のバージョンでは、Custom Metrics Autoscaler Operator は、他の namespace 内のオブジェクトやクラスタースコープのオブジェクトを含む、すべてのマネージドオブジェクトの所有権を取得しようとしていました。このため、Custom Metrics Autoscaler Operator は API サーバーに必要な認証情報を読み取るためのロールバインディングを作成できませんでした。これにより、
kube-systemnamespace でエラーが発生しました。今回の修正により、Custom Metrics Autoscaler Operator は、別の namespace 内のオブジェクトまたはクラスタースコープのオブジェクトへのownerReferenceフィールドの追加をスキップします。その結果、ロールバインディングがエラーなしで作成されるようになりました。(OCPBUGS-15038) -
以前は、Custom Metrics Autoscaler Operator によって、
ownerReferencesフィールドがopenshift-kedanamespace に追加されていました。これによって機能上の問題が発生することはありませんでしたが、このフィールドの存在によりクラスター管理者が混乱する可能性がありました。今回の修正により、Custom Metrics Autoscaler Operator はownerReferenceフィールドをopenshift-kedanamespace に追加しなくなりました。その結果、openshift-kedanamespace には余分なownerReferenceフィールドが含まれなくなりました。(OCPBUGS-15293) -
以前のバージョンでは、Pod ID 以外の認証方法で設定された Prometheus トリガーを使用し、
podIdentityパラメーターがnoneに設定されている場合、トリガーはスケーリングに失敗しました。今回の修正により、OpenShift の Custom Metrics Autoscaler は、Pod ID プロバイダータイプnoneを適切に処理できるようになりました。その結果、Pod ID 以外の認証方法で設定され、podIdentityパラメーターがnoneに設定された Prometheus トリガーが適切にスケーリングされるようになりました。(OCPBUGS-15274)
3.1.2.12. Custom Metrics Autoscaler Operator 2.10.1 リリースノート
この Custom Metrics Autoscaler Operator 2.10.1 リリースでは、Red Hat OpenShift Service on AWS クラスターで Operator を実行するための新機能とバグ修正を使用できます。Custom Metrics Autoscaler Operator 2.10.1 のコンポーネントは RHEA-2023:3199 でリリースされました。
このバージョンの Custom Metrics Autoscaler Operator をインストールする前に、以前にインストールされたテクノロジープレビューバージョンまたはコミュニティーがサポートするバージョンの KEDA を削除します。
3.1.2.12.1. 新機能および機能拡張
3.1.2.12.1.1. Custom Metrics Autoscaler Operator の一般提供
Custom Metrics Autoscaler Operator バージョン 2.10.1 以降で、Custom Metrics Autoscaler Operator の一般提供が開始されました。
スケーリングされたジョブを使用したスケーリングはテクノロジープレビュー機能です。テクノロジープレビュー機能は、Red Hat 製品のサービスレベルアグリーメント (SLA) の対象外であり、機能的に完全ではないことがあります。Red Hat は、実稼働環境でこれらを使用することを推奨していません。テクノロジープレビュー機能は、最新の製品機能をいち早く提供して、開発段階で機能のテストを行い、フィードバックを提供していただくことを目的としています。
Red Hat のテクノロジープレビュー機能のサポート範囲に関する詳細は、テクノロジープレビュー機能のサポート範囲 を参照してください。
3.1.2.12.1.2. パフォーマンスメトリクス
Prometheus Query Language (PromQL) を使用して、Custom Metrics Autoscaler Operator でメトリクスのクエリーを行えるようになりました。
3.1.2.12.1.3. スケーリングされたオブジェクトのカスタムメトリクス自動スケーリングの一時停止
必要に応じてスケーリングされたオブジェクトの自動スケーリングを一時停止し、準備ができたら再開できるようになりました。
3.1.2.12.1.4. スケーリングされたオブジェクトのレプリカフォールバック
スケーリングされたオブジェクトがソースからメトリクスを取得できなかった場合に、フォールバックするレプリカの数を指定できるようになりました。
3.1.2.12.1.5. スケーリングされたオブジェクトのカスタマイズ可能な HPA 命名
スケーリングされたオブジェクトで、Horizontal Pod Autoscaler のカスタム名を指定できるようになりました。
3.1.2.12.1.6. アクティブ化およびスケーリングのしきい値
Horizontal Pod Autoscaler (HPA) は 0 レプリカへの、または 0 レプリカからのスケーリングができないため、Custom Metrics Autoscaler Operator がそのスケーリングを実行し、その後 HPA がスケーリングを実行します。レプリカの数に基づき HPA が自動スケーリングを引き継ぐタイミングを指定できるようになりました。これにより、スケーリングポリシーの柔軟性が向上します。
3.1.2.13. Custom Metrics Autoscaler Operator 2.8.2-174 リリースノート
この Custom Metrics Autoscaler Operator 2.8.2-174 リリースでは、Red Hat OpenShift Service on AWS クラスターで Operator を実行するための新機能とバグ修正を使用できます。Custom Metrics Autoscaler Operator 2.8.2-174 のコンポーネントは RHEA-2023:1683 でリリースされました。
Custom Metrics Autoscaler Operator バージョン 2.8.2-174 は、テクノロジープレビュー 機能です。
3.1.2.13.1. 新機能および機能拡張
3.1.2.13.1.1. Operator のアップグレードサポート
以前の Custom Metrics Autoscaler Operator バージョンからアップグレードできるようになりました。Operator のアップグレードの詳細は、「関連情報」の「Operator の更新チャネルの変更」を参照してください。
3.1.2.13.1.2. must-gather サポート
Red Hat OpenShift Service on AWS の must-gather ツールを使用して、Custom Metrics Autoscaler Operator とそのコンポーネントに関するデータを収集できるようになりました。現時点で、Custom Metrics Autoscaler で must-gather ツールを使用するプロセスは、他の Operator とは異なります。詳細は、関連情報の「デバッグデータの収集」を参照してください。
3.1.2.14. Custom Metrics Autoscaler Operator 2.8.2 リリースノート
この Custom Metrics Autoscaler Operator 2.8.2 リリースでは、Operator in an Red Hat OpenShift Service on AWS クラスターで Operator を実行するための新機能とバグ修正を使用できます。Custom Metrics Autoscaler Operator 2.8.2 のコンポーネントは RHSA-2023:1042 でリリースされました。
Custom Metrics Autoscaler Operator バージョン 2.8.2 は テクノロジープレビュー 機能です。
3.1.2.14.1. 新機能および機能拡張
3.1.2.14.1.1. 監査ロギング
Custom Metrics Autoscaler Operator とその関連コンポーネントの監査ログを収集して表示できるようになりました。監査ログは、システムに影響を与えた一連のアクティビティーを個別のユーザー、管理者その他システムのコンポーネント別に記述したセキュリティー関連の時系列のレコードです。
3.1.2.14.1.2. Apache Kafka メトリクスに基づくアプリケーションのスケーリング
KEDA Apache kafka トリガー/スケーラーを使用して、Apache Kafka トピックに基づいてデプロイメントをスケーリングできるようになりました。
3.1.2.14.1.3. CPU メトリクスに基づくアプリケーションのスケーリング
KEDA CPU トリガー/スケーラーを使用して、CPU メトリクスに基づいてデプロイメントをスケーリングできるようになりました。
3.1.2.14.1.4. メモリーメトリクスに基づくアプリケーションのスケーリング
KEDA メモリートリガー/スケーラーを使用して、メモリーメトリクスに基づいてデプロイメントをスケーリングできるようになりました。
3.2. Custom Metrics Autoscaler Operator の概要
開発者は、Red Hat OpenShift の Custom Metrics Autoscaler Operator を使用して、CPU やメモリー以外のものも含むカスタムメトリクスに基づいて、Red Hat OpenShift Service on AWS のデプロイメント、ステートフルセット、カスタムリソース、またはジョブの Pod 数を自動的に増減する方法を指定できます。
Custom Metrics Autoscaler Operator は、Kubernetes Event Driven Autoscaler (KEDA) に基づくオプションの Operator であり、Pod メトリクス以外の追加のメトリクスソースを使用してワークロードをスケーリングできます。
カスタムメトリクスオートスケーラーは現在、Prometheus、CPU、メモリー、および Apache Kafka メトリクスのみをサポートしています。
Custom Metrics Autoscaler Operator は、特定のアプリケーションからのカスタムの外部メトリクスに基づいて、Pod をスケールアップおよびスケールダウンします。他のアプリケーションは引き続き他のスケーリング方法を使用します。スケーラーとも呼ばれる トリガー を設定します。これは、カスタムメトリクスオートスケーラーがスケーリング方法を決定するために使用するイベントとメトリクスのソースです。カスタムメトリクスオートスケーラーはメトリクス API を使用して、外部メトリクスを Red Hat OpenShift Service on AWS が使用できる形式に変換します。カスタムメトリクスオートスケーラーは、実際のスケーリングを実行する Horizontal Pod Autoscaler (HPA) を作成します。
カスタムメトリクスオートスケーラーを使用するには、ワークロード用の ScaledObject または ScaledJob オブジェクトを作成します。これらは、スケーリングメタデータを定義するカスタムリソース (CR) です。スケーリングするデプロイメントまたはジョブ、スケーリングするメトリクスのソース (トリガー)、許可される最小および最大レプリカ数などのその他のパラメーターを指定します。
スケーリングするワークロードごとに、スケーリングされたオブジェクトまたはスケーリングされたジョブを 1 つだけ作成できます。また、スケーリングされたオブジェクトまたはスケーリングされたジョブと Horizontal Pod Autoscaler (HPA) を同じワークロードで使用することはできません。
カスタムメトリクスオートスケーラーは、HPA とは異なり、ゼロにスケーリングできます。カスタムメトリクスオートスケーラー CR の minReplicaCount 値を 0 に設定すると、カスタムメトリクスオートスケーラーはワークロードを 1 レプリカから 0 レプリカにスケールダウンするか、0 レプリカから 1 にスケールアップします。これは、アクティベーションフェーズ として知られています。1 つのレプリカにスケールアップした後、HPA はスケーリングを制御します。これは スケーリングフェーズ として知られています。
一部のトリガーにより、クラスターメトリクスオートスケーラーによってスケーリングされるレプリカの数を変更できます。いずれの場合も、アクティベーションフェーズを設定するパラメーターは、activation で始まる同じフレーズを常に使用します。たとえば、threshold パラメーターがスケーリングを設定する場合、activationThreshold はアクティベーションを設定します。アクティベーションフェーズとスケーリングフェーズを設定すると、スケーリングポリシーの柔軟性が向上します。たとえば、アクティベーションフェーズをより高く設定することで、メトリクスが特に低い場合にスケールアップまたはスケールダウンを防ぐことができます。
それぞれ異なる決定を行う場合は、スケーリングの値よりもアクティベーションの値が優先されます。たとえば、threshold が 10 に設定されていて、activationThreshold が 50 である場合にメトリクスが 40 を報告した場合、スケーラーはアクティブにならず、HPA が 4 つのインスタンスを必要とする場合でも Pod はゼロにスケーリングされます。
図3.1 カスタムメトリクスオートスケーラーのワークフロー
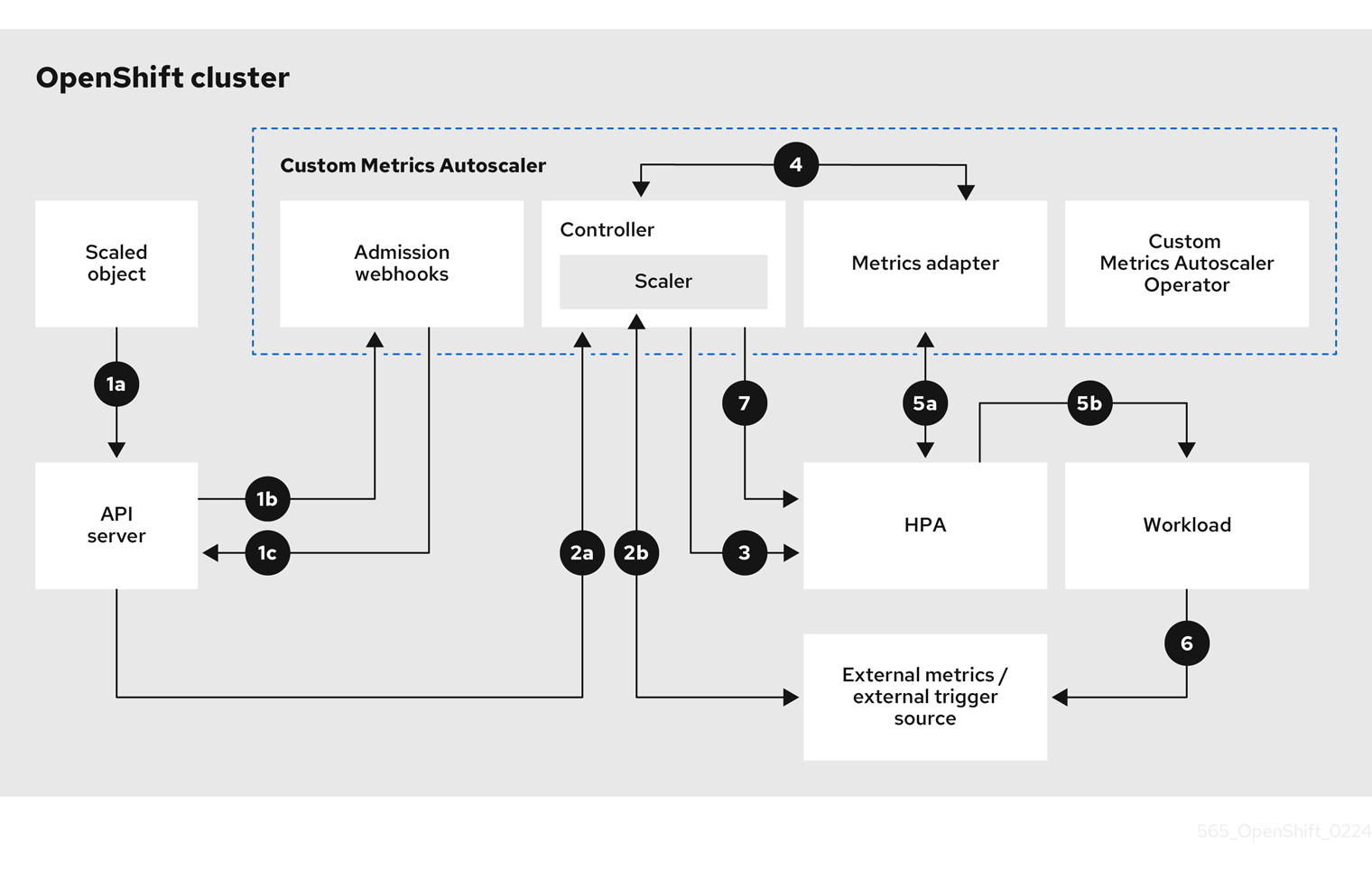
- クラスター上のワークロード用のスケーリングされたオブジェクトのカスタムリソースを作成または変更します。オブジェクトには、そのワークロードのスケーリング設定を含めます。OpenShift API サーバーは、新しいオブジェクトを受け入れる前に、そのオブジェクトをカスタムメトリクスオートスケーラーのアドミッション Webhook プロセスに送信して、オブジェクトが有効であることを確認します。検証が成功すると、API サーバーはオブジェクトを永続化します。
- カスタムメトリクスオートスケーラーコントローラーが、スケーリングされたオブジェクトの更新または変更を監視します。OpenShift API サーバーがコントローラーに変更を通知すると、コントローラーは、オブジェクト内で指定されている外部トリガーソース (データソースとも呼ばれる) を監視して、メトリクスデータの変更を確認します。1 つ以上のスケーラーが外部トリガーソースからのスケーリングデータを要求します。たとえば、Kafka トリガータイプの場合、コントローラーは Kafka スケーラーを使用して Kafka インスタンスと通信し、トリガーによって要求されたデータを取得します。
- コントローラーが、スケーリングされたオブジェクトの Horizontal Pod Autoscaler オブジェクトを作成します。その結果、Horizontal Pod Autoscaler (HPA) Operator が、トリガーに関連付けられたスケーリングデータの監視を開始します。HPA は、クラスターの OpenShift API サーバーエンドポイントからスケーリングデータを要求します。
- OpenShift API サーバーエンドポイントが、カスタムメトリクスオートスケーラーのメトリクスアダプターによって提供されます。メトリクスアダプターは、カスタムメトリクスの要求を受信すると、コントローラーへの GRPC 接続を使用して、スケーラーから受信した最新のトリガーデータを要求します。
- HPA がメトリクスアダプターから受信したデータに基づいてスケーリングを決定し、レプリカを増減することでワークロードをスケールアップまたはスケールダウンします。
- 運用中に、ワークロードがスケーリングメトリクスに影響を与えることがあります。たとえば、Kafka キュー内の作業を処理するためにワークロードがスケールアップされた場合、ワークロードがすべての作業を処理した後、キューのサイズが減少します。その結果、ワークロードがスケールダウンされます。
-
メトリクスが
minReplicaCount値で指定された範囲内にある場合、カスタムメトリクスオートスケーラーコントローラーがすべてのスケーリングを無効にして、レプリカ数を一定に維持します。メトリクスがその範囲を超える場合、カスタムメトリクスオートスケーラーコントローラーはスケーリングを有効にして、HPA がワークロードをスケーリングできるようにします。スケーリングが無効になっている間、HPA は何もアクションを実行しません。
3.2.1. Custom Metrics Autoscaler 用のカスタム CA 証明書
デフォルトでは、Custom Metrics Autoscaler Operator は、自動的に生成されたサービス CA 証明書を使用して、クラスター上のサービスに接続します。
カスタム CA 証明書を必要とするクラスター外のサービスを使用する場合は、必要な証明書を config map に追加できます。次に、カスタムメトリクスオートスケーラーのインストール の説明に従って、KedaController カスタムリソースに config map を追加します。Operator は起動時にこれらの証明書を読み込み、Operator によって信頼されたものとして登録します。
config map には、1 つ以上の PEM エンコードされた CA 証明書を含む 1 つ以上の証明書ファイルを含めることができます。または、証明書ファイルごとに個別の config map を使用することもできます。
後で config map を更新して追加の証明書を追加する場合は、変更を有効にするために keda-operator-* Pod を再起動する必要があります。
3.3. カスタムメトリクスオートスケーラーのインストール
Custom Metrics Autoscaler Operator は、Red Hat OpenShift Service on AWS Web コンソールを使用してインストールできます。
インストールにより、以下の 5 つの CRD が作成されます。
-
ClusterTriggerAuthentication -
KedaController -
ScaledJob -
ScaledObject -
TriggerAuthentication
インストールプロセスでは、KedaController カスタムリソース (CR) も作成されます。必要に応じて、デフォルトの KedaController CR を変更できます。詳細は、「Keda Controller CR の編集」を参照してください。
2.17.2 より前のバージョンの Custom Metrics Autoscaler Operator をインストールする場合は、Keda Controller CR を手動で作成する必要があります。CR を作成するには、「Keda Controller CR の編集」で説明されている手順を使用できます。
3.3.1. カスタムメトリクスオートスケーラーのインストール
次の手順を使用して、Custom Metrics Autoscaler Operator をインストールできます。
前提条件
-
cluster-adminロールを持つユーザーとしてクラスターにアクセスできる。 - これまでにインストールしたテクノロジープレビューバージョンの Cluster Metrics Autoscaler Operator を削除する。
コミュニティーベースの KEDA バージョンをすべて削除する。
次のコマンドを実行して、KEDA 1.x カスタムリソース定義を削除する。
$ oc delete crd scaledobjects.keda.k8s.io$ oc delete crd triggerauthentications.keda.k8s.io-
kedanamespace が存在することを確認します。存在しない場合は、kedanamespace を手動で作成する必要があります。 オプション: Custom Metrics Autoscaler Operator を外部 Kafka クラスターや外部 Prometheus サービスなどのクラスター外のサービスに接続する必要がある場合は、必要なサービス CA 証明書を config map に配置します。config map は、Operator がインストールされているのと同じ namespace に存在する必要があります。以下に例を示します。
$ oc create configmap -n openshift-keda thanos-cert --from-file=ca-cert.pem
手順
- Red Hat OpenShift Service on AWS Web コンソールで、Ecosystem → Software Catalog をクリックします。
- 使用可能な Operator のリストから Custom Metrics Autoscaler を選択し、Install をクリックします。
- Install Operator ページで、Installation Mode に A specific namespace on the cluster オプションが選択されていることを確認します。
- Installed Namespace で、Select a namespace をクリックします。
Select Project をクリックします。
-
kedanamespace が存在する場合は、リストから keda を選択します。 kedanamespace が存在しない場合は、以下を実行します。- Create Project を選択して、Create Project ウィンドウを開きます。
-
Name フィールドに
kedaと入力します。 -
Display Name フィールドに、
kedaなどのわかりやすい名前を入力します。 - オプション: Display Name フィールドに、namespace の説明を追加します。
- Create をクリックします。
-
- Install をクリックします。
Custom Metrics Autoscaler Operator コンポーネントをリスト表示して、インストールを確認します。
- Workloads → Pods に移動します。
-
ドロップダウンメニューから
kedaプロジェクトを選択し、custom-metrics-autoscaler-operator-*Pod が実行されていることを確認します。 -
Workloads → Deployments に移動して、
custom-metrics-autoscaler-operatorデプロイメントが実行されていることを確認します。
オプション: 次のコマンドを使用して、OpenShift CLI でインストールを確認します。
$ oc get all -n keda以下のような出力が表示されます。
出力例
NAME READY STATUS RESTARTS AGE pod/custom-metrics-autoscaler-operator-5fd8d9ffd8-xt4xp 1/1 Running 0 18m NAME READY UP-TO-DATE AVAILABLE AGE deployment.apps/custom-metrics-autoscaler-operator 1/1 1 1 18m NAME DESIRED CURRENT READY AGE replicaset.apps/custom-metrics-autoscaler-operator-5fd8d9ffd8 1 1 1 18m
3.3.2. Keda Controller CR の編集
Custom Metrics Autoscaler Operator のインストール中に自動的にインストールされる KedaController カスタムリソース (CR) を変更するには、次の手順に従います。
手順
- Red Hat OpenShift Service on AWS Web コンソールで、Ecosystem → Installed Operator をクリックします。
- Custom Metrics Autoscaler をクリックします。
- Operator Details ページで、KedaController タブをクリックします。
KedaController タブで、Create KedaController をクリックしてファイルを編集します。
kind: KedaController apiVersion: keda.sh/v1alpha1 metadata: name: keda namespace: openshift-keda spec: watchNamespace: ''1 operator: logLevel: info2 logEncoder: console3 caConfigMaps:4 - thanos-cert - kafka-cert volumeMounts:5 - mountPath: /<path_to_directory> name: <name> volumes:6 - name: <volume_name> emptyDir: medium: Memory metricsServer: logLevel: '0'7 auditConfig:8 logFormat: "json" logOutputVolumeClaim: "persistentVolumeClaimName" policy: rules: - level: Metadata omitStages: ["RequestReceived"] omitManagedFields: false lifetime: maxAge: "2" maxBackup: "1" maxSize: "50" serviceAccount: {}- 1
- Custom Metrics Autoscaler Operator がアプリケーションをスケーリングする単一の namespace を指定します。空白のままにするか、または空にして、すべての namespace でアプリケーションをスケーリングします。このフィールドは、namespace があるか、空である必要があります。デフォルト値は空です。
- 2
- Custom Metrics Autoscaler Operator ログメッセージの詳細レベルを指定します。許可される値は
debug、info、errorです。デフォルトはinfoです。 - 3
- Custom Metrics Autoscaler Operator ログメッセージのログ形式を指定します。許可される値は
consoleまたはjsonです。デフォルトはconsoleです。 - 4
- オプション: CA 証明書を持つ 1 つ以上の config map を指定します。Custom Metrics Autoscaler Operator はこれを使用して、TLS 対応のメトリクスソースにセキュアに接続できます。
- 5
- オプション: コンテナーのマウントパスを追加します。
- 6
- オプション:
volumesブロックを追加し、各 projected ボリュームのソースをリストします。 - 7
- Custom Metrics Autoscaler Metrics Server のログレベルを指定します。使用可能な値は、
infoの場合は0、debugの場合は4です。デフォルトは0です。 - 8
- Custom Metrics Autoscaler Operator の監査ログをアクティブにして、使用する監査ポリシーを指定します (「監査ログの設定」セクションを参照)。
- Save をクリックして、変更を保存します。
3.4. カスタムメトリクスオートスケーラートリガーについて
スケーラーとも呼ばれるトリガーは、Custom Metrics Autoscaler Operator が Pod をスケーリングするために使用するメトリクスを提供します。
カスタムメトリクスオートスケーラーは現在、Prometheus、CPU、メモリー、Apache Kafka、cron トリガーをサポートしています。
以下のセクションで説明するように、ScaledObject または ScaledJob カスタムリソースを使用して、特定のオブジェクトのトリガーを設定します。
scaled object で使用 する認証局、または クラスター内のすべてのスケーラー用 の認証局を設定できます。
3.4.1. Prometheus トリガーについて
Prometheus メトリクスに基づいて Pod をスケーリングできます。このメトリクスは、インストール済みの Red Hat OpenShift Service on AWS モニタリングまたは外部 Prometheus サーバーをメトリクスソースとして使用できます。Red Hat OpenShift Service on AWS モニタリングをメトリクスのソースとして使用するために必要な設定は、「OpenShift Service on AWS モニタリングを使用するためのカスタムメトリクスオートスケーラーの設定」を参照してください。
カスタムメトリクスオートスケーラーがスケーリングしているアプリケーションから Prometheus がメトリクスを収集している場合は、カスタムリソースで最小レプリカ数を 0 に設定しないでください。アプリケーション Pod がないと、カスタムメトリクスオートスケーラーにスケーリングの基準となるメトリクスが提供されません。
Prometheus ターゲットを使用した scaled object の例
apiVersion: keda.sh/v1alpha1
kind: ScaledObject
metadata:
name: prom-scaledobject
namespace: my-namespace
spec:
# ...
triggers:
- type: prometheus
metadata:
serverAddress: https://thanos-querier.openshift-monitoring.svc.cluster.local:9092
namespace: kedatest
metricName: http_requests_total
threshold: '5'
query: sum(rate(http_requests_total{job="test-app"}[1m]))
authModes: basic
cortexOrgID: my-org
ignoreNullValues: "false"
unsafeSsl: "false"
timeout: 1000 - 1
- Prometheus をトリガータイプとして指定します。
- 2
- Prometheus サーバーのアドレスを指定します。この例では、Red Hat OpenShift Service on AWS モニタリングを使用します。
- 3
- オプション: スケーリングするオブジェクトの namespace を指定します。メトリクスのソースとして Red Hat OpenShift Service on AWS モニタリングを使用する場合、このパラメーターは必須です。
- 4
external.metrics.k8s.ioAPI でメトリクスを識別する名前を指定します。複数のトリガーを使用している場合、すべてのメトリクス名が一意である必要があります。- 5
- スケーリングをトリガーする値を指定します。引用符で囲まれた文字列値として指定する必要があります。
- 6
- 使用する Prometheus クエリーを指定します。
- 7
- 使用する認証方法を指定します。Prometheus スケーラーは、ベアラー認証 (
bearer)、Basic 認証 (basic)、または TLS 認証 (tls) をサポートしています。以下のセクションで説明するように、トリガー認証で特定の認証パラメーターを設定します。必要に応じて、シークレットを使用することもできます。 - 8
- 9
- オプション: Prometheus ターゲットが失われた場合のトリガーの処理方法を指定します。
-
trueの場合、Prometheus ターゲットが失われても、トリガーは動作し続けます。これがデフォルトの動作です。 -
falseの場合、Prometheus ターゲットが失われると、トリガーはエラーを返します。
-
- 10
- オプション: 証明書チェックをスキップするかどうかを指定します。たとえば、テスト環境で実行しており、Prometheus エンドポイントで自己署名証明書を使用している場合は、チェックをスキップできます。
-
falseの場合、証明書のチェックが実行されます。これがデフォルトの動作です。 trueの場合、証明書のチェックは実行されません。重要チェックのスキップは推奨されません。
-
- 11
- オプション: この Prometheus トリガーで使用される HTTP クライアントの HTTP 要求タイムアウトをミリ秒単位で指定します。この値は、グローバルタイムアウト設定をオーバーライドします。
3.4.1.1. Prometheus と DCGM メトリクスを使用した GPU ベースの自動スケーリングの設定
カスタムメトリクスオートスケーラーを NVIDIA データセンター GPU マネージャー (DCGM) メトリクスとともに使用すると、GPU 使用率に基づいてワークロードをスケーリングできます。これは、GPU リソースを必要とする AI および機械学習のワークロードに特に役立ちます。
GPU ベースの自動スケーリングのために Prometheus ターゲットを使用する scaled object の例
apiVersion: keda.sh/v1alpha1
kind: ScaledObject
metadata:
name: gpu-scaledobject
namespace: my-namespace
spec:
scaleTargetRef:
kind: Deployment
name: gpu-deployment
minReplicaCount: 1
maxReplicaCount: 5
triggers:
- type: prometheus
metadata:
serverAddress: https://thanos-querier.openshift-monitoring.svc.cluster.local:9092
namespace: my-namespace
metricName: gpu_utilization
threshold: '90'
query: SUM(DCGM_FI_DEV_GPU_UTIL{instance=~".+", gpu=~".+"})
authModes: bearer
authenticationRef:
name: keda-trigger-auth-prometheus- 1
- 維持するレプリカの最小数を指定します。GPU ワークロードの場合は、メトリクスが継続的に収集されるように、これを
0に設定しないください。 - 2
- スケールアップ操作中に許可するレプリカの最大数を指定します。
- 3
- スケーリングをトリガーする GPU 使用率のしきい値をパーセンテージで指定します。GPU の平均使用率が 90% を超えると、オートスケーラーがデプロイメントをスケールアップします。
- 4
- すべての GPU デバイスの GPU 使用率を監視するために、NVIDIA DCGM メトリクスを使用して Prometheus クエリーを指定します。
DCGM_FI_DEV_GPU_UTILメトリクスは、GPU 使用率を提供します。
3.4.1.2. Red Hat OpenShift Service on AWS モニタリングを使用するためのカスタムメトリクスオートスケーラーの設定
カスタムメトリクスオートスケーラーが使用するメトリクスのソースとして、インストール済みの Red Hat OpenShift Service on AWS Prometheus モニタリングを使用できます。ただし、実行する必要がある追加の設定がいくつかあります。
scaled object が Red Hat OpenShift Service on AWS の Prometheus メトリクスを読み取れるように、トリガー認証またはクラスタートリガー認証を使用して、必要な認証情報を提供する必要があります。以下の手順は、使用するトリガー認証方式によって異なります。トリガー認証の詳細は、「カスタムメトリクスオートスケーラーのトリガー認証について」を参照してください。
これらの手順は、外部 Prometheus ソースには必要ありません。
このセクションで説明するように、次のタスクを実行する必要があります。
- サービスアカウントを作成します。
- トリガー認証を作成します。
- ロールを作成します。
- そのロールをサービスアカウントに追加します。
- Prometheus が使用するトリガー認証オブジェクトでトークンを参照します。
前提条件
- Red Hat OpenShift Service on AWS モニタリングをインストールしている。
- ユーザー定義のワークロードのモニタリングを、Red Hat OpenShift Service on AWS モニタリングで有効にしている (ユーザー定義のワークロードモニタリング設定マップの作成 セクションで説明)。
- Custom Metrics Autoscaler Operator をインストールしている。
手順
適切なプロジェクトに切り替えます。
$ oc project <project_name>1 - 1
- 次のプロジェクトのいずれかを指定します。
- トリガー認証を使用している場合は、スケーリングするオブジェクトを含むプロジェクトを指定します。
-
クラスタートリガー認証を使用している場合は、
openshift-kedaプロジェクトを指定します。
クラスターにサービスアカウントがない場合は作成します。
次のコマンドを使用して、
service accountオブジェクトを作成します。$ oc create serviceaccount thanos1 - 1
- サービスアカウントの名前を指定します。
サービスアカウントトークンを使用してトリガー認証を作成します。
以下のような YAML ファイルを作成します。
apiVersion: keda.sh/v1alpha1 kind: <authentication_method>1 metadata: name: keda-trigger-auth-prometheus spec: boundServiceAccountToken:2 - parameter: bearerToken3 serviceAccountName: thanos4 CR オブジェクトを作成します。
$ oc create -f <file-name>.yaml
Thanos メトリクスを読み取るためのロールを作成します。
次のパラメーターを使用して YAML ファイルを作成します。
apiVersion: rbac.authorization.k8s.io/v1 kind: Role metadata: name: thanos-metrics-reader rules: - apiGroups: - "" resources: - pods verbs: - get - apiGroups: - metrics.k8s.io resources: - pods - nodes verbs: - get - list - watchCR オブジェクトを作成します。
$ oc create -f <file-name>.yaml
Thanos メトリクスを読み取るためのロールバインディングを作成します。
以下のような YAML ファイルを作成します。
apiVersion: rbac.authorization.k8s.io/v1 kind: <binding_type>1 metadata: name: thanos-metrics-reader2 namespace: my-project3 roleRef: apiGroup: rbac.authorization.k8s.io kind: Role name: thanos-metrics-reader subjects: - kind: ServiceAccount name: thanos4 namespace: <namespace_name>5 - 1
- 次のオブジェクト型のいずれかを指定します。
-
トリガー認証を使用している場合は、
RoleBindingを指定します。 -
クラスタートリガー認証を使用している場合は、
ClusterRoleBindingを指定します。
-
トリガー認証を使用している場合は、
- 2
- 作成したロールの名前を指定します。
- 3
- 次のプロジェクトのいずれかを指定します。
- トリガー認証を使用している場合は、スケーリングするオブジェクトを含むプロジェクトを指定します。
-
クラスタートリガー認証を使用している場合は、
openshift-kedaプロジェクトを指定します。
- 4
- ロールにバインドするサービスアカウントの名前を指定します。
- 5
- サービスアカウントを先に作成したプロジェクトを指定します。
CR オブジェクトを作成します。
$ oc create -f <file-name>.yaml
「カスタムメトリクスオートスケーラーの追加方法について」で説明されているとおり、スケーリングされたオブジェクトまたはスケーリングされたジョブをデプロイして、アプリケーションの自動スケーリングを有効化できます。Red Hat OpenShift Service on AWS モニタリングをソースとして使用するには、トリガーまたはスケーラーに以下のパラメーターを含める必要があります。
-
triggers.typeはprometheusにしてください。 -
triggers.metadata.serverAddressはhttps://thanos-querier.openshift-monitoring.svc.cluster.local:9092にしてください。 -
triggers.metadata.authModesはbearerにしてください。 -
triggers.metadata.namespaceは、スケーリングするオブジェクトの namespace に設定してください。 -
triggers.authenticationRefは、直前の手順で指定されたトリガー認証リソースを指す必要があります。
3.4.2. CPU トリガーについて
CPU メトリクスに基づいて Pod をスケーリングできます。このトリガーは、クラスターメトリクスをメトリクスのソースとして使用します。
カスタムメトリクスオートスケーラーは、オブジェクトに関連付けられた Pod をスケーリングして、指定された CPU 使用率を維持します。オートスケーラーは、すべての Pod で指定された CPU 使用率を維持するために、最小数と最大数の間でレプリカ数を増減します。メモリートリガーは、Pod 全体のメモリー使用率を考慮します。Pod に複数のコンテナーがある場合、メモリートリガーは Pod 内にあるすべてのコンテナーの合計メモリー使用率を考慮します。
-
このトリガーは、
ScaledJobカスタムリソースでは使用できません。 -
メモリートリガーを使用してオブジェクトをスケーリングすると、複数のトリガーを使用している場合でも、オブジェクトは
0にスケーリングされません。
CPU ターゲットを使用した scaled object の例
apiVersion: keda.sh/v1alpha1
kind: ScaledObject
metadata:
name: cpu-scaledobject
namespace: my-namespace
spec:
# ...
triggers:
- type: cpu
metricType: Utilization
metadata:
value: '60'
minReplicaCount: 1 - 1
- トリガータイプとして CPU を指定します。
- 2
- 使用するメトリクスのタイプ (
UtilizationまたはAverageValueのいずれか) を指定します。 - 3
- スケーリングをトリガーする値を指定します。引用符で囲まれた文字列値として指定する必要があります。
-
Utilizationを使用する場合、ターゲット値は、関連する全 Pod のリソースメトリクスの平均値であり、Pod のリソースの要求値に占めるパーセンテージとして表されます。 -
AverageValueを使用する場合、ターゲット値は、関連する全 Pod のメトリクスの平均値です。
-
- 4
- スケールダウン時のレプリカの最小数を指定します。CPU トリガーの場合は、
1以上の値を入力します。CPU メトリクスのみを使用している場合、HPA はゼロにスケールできないためです。
3.4.3. メモリートリガーについて
メモリーメトリクスに基づいて Pod をスケーリングできます。このトリガーは、クラスターメトリクスをメトリクスのソースとして使用します。
カスタムメトリクスオートスケーラーは、オブジェクトに関連付けられた Pod をスケーリングして、指定されたメモリー使用率を維持します。オートスケーラーは、すべての Pod で指定のメモリー使用率を維持するために、最小数と最大数の間でレプリカ数を増減します。メモリートリガーは、Pod 全体のメモリー使用率を考慮します。Pod に複数のコンテナーがある場合、メモリー使用率はすべてのコンテナーの合計になります。
-
このトリガーは、
ScaledJobカスタムリソースでは使用できません。 -
メモリートリガーを使用してオブジェクトをスケーリングすると、複数のトリガーを使用している場合でも、オブジェクトは
0にスケーリングされません。
メモリーターゲットを使用した scaled object の例
apiVersion: keda.sh/v1alpha1
kind: ScaledObject
metadata:
name: memory-scaledobject
namespace: my-namespace
spec:
# ...
triggers:
- type: memory
metricType: Utilization
metadata:
value: '60'
containerName: api - 1
- トリガータイプとしてメモリーを指定します。
- 2
- 使用するメトリクスのタイプ (
UtilizationまたはAverageValueのいずれか) を指定します。 - 3
- スケーリングをトリガーする値を指定します。引用符で囲まれた文字列値として指定する必要があります。
-
Utilizationを使用する場合、ターゲット値は、関連する全 Pod のリソースメトリクスの平均値であり、Pod のリソースの要求値に占めるパーセンテージとして表されます。 -
AverageValueを使用する場合、ターゲット値は、関連する全 Pod のメトリクスの平均値です。
-
- 4
- オプション: Pod 全体ではなく、そのコンテナーのみのメモリー使用率に基づいて、スケーリングする個々のコンテナーを指定します。この例では、
apiという名前のコンテナーのみがスケーリングされます。
3.4.4. Kafka トリガーについて
Apache Kafka トピックまたは Kafka プロトコルをサポートするその他のサービスに基づいて Pod をスケーリングできます。カスタムメトリクスオートスケーラーは、スケーリングされるオブジェクトまたはスケーリングされるジョブで allowIdleConsumers パラメーターを true に設定しない限り、Kafka パーティションの数を超えてスケーリングしません。
コンシューマーグループの数がトピック内のパーティションの数を超えると、余分なコンシューマーグループはそのままアイドル状態になります。これを回避するために、デフォルトではレプリカの数は次の値を超えません。
- トピックのパーティションの数 (トピックが指定されている場合)。
- コンシューマーグループ内の全トピックのパーティション数 (トピックが指定されていない場合)。
-
スケーリングされるオブジェクトまたはスケーリングされるジョブの CR で指定された
maxReplicaCount。
これらのデフォルトの動作は、allowIdleConsumers パラメーターを使用して無効にすることができます。
Kafka ターゲットを使用した scaled object の例
apiVersion: keda.sh/v1alpha1
kind: ScaledObject
metadata:
name: kafka-scaledobject
namespace: my-namespace
spec:
# ...
triggers:
- type: kafka
metadata:
topic: my-topic
bootstrapServers: my-cluster-kafka-bootstrap.openshift-operators.svc:9092
consumerGroup: my-group
lagThreshold: '10'
activationLagThreshold: '5'
offsetResetPolicy: latest
allowIdleConsumers: true
scaleToZeroOnInvalidOffset: false
excludePersistentLag: false
version: '1.0.0'
partitionLimitation: '1,2,10-20,31'
tls: enable - 1
- トリガータイプとして Kafka を指定します。
- 2
- Kafka がオフセットラグを処理している Kafka トピックの名前を指定します。
- 3
- 接続する Kafka ブローカーのコンマ区切りリストを指定します。
- 4
- トピックのオフセットの確認と、関連するラグの処理に使用される Kafka コンシューマーグループの名前を指定します。
- 5
- オプション: スケーリングをトリガーする平均ターゲット値を指定します。引用符で囲まれた文字列値として指定する必要があります。デフォルトは
5です。 - 6
- オプション: アクティベーションフェーズのターゲット値を指定します。引用符で囲まれた文字列値として指定する必要があります。
- 7
- オプション: Kafka コンシューマーの Kafka オフセットリセットポリシーを指定します。使用可能な値は
latestおよびearliestです。デフォルトはlatestです。 - 8
- オプション: Kafka レプリカの数がトピックのパーティションの数を超えることを許可するかどうかを指定します。
-
trueの場合、Kafka レプリカの数はトピックのパーティションの数を超えることができます。これにより、Kafka コンシューマーがアイドル状態になることが許容されます。 -
falseの場合、Kafka レプリカの数はトピックのパーティションの数を超えることはできません。これがデフォルトです。
-
- 9
- Kafka パーティションに有効なオフセットがない場合のトリガーの動作を指定します。
-
trueの場合、そのパーティションのコンシューマーはゼロにスケーリングされます。 -
falseの場合、スケーラーはそのパーティションのために 1 つのコンシューマーを保持します。これがデフォルトです。
-
- 10
- オプション: 現在のオフセットが前のポーリングサイクルの現在のオフセットと同じであるパーティションのパーティションラグをトリガーに含めるか除外するかを指定します。
-
trueの場合、スケーラーはこれらのパーティションのパーティションラグを除外します。 -
falseの場合、すべてのパーティションのコンシューマーラグがすべてトリガーに含まれます。これがデフォルトです。
-
- 11
- オプション: Kafka ブローカーのバージョンを指定します。引用符で囲まれた文字列値として指定する必要があります。デフォルトは
1.0.0です。 - 12
- オプション: スケーリングのスコープを適用するパーティション ID のコンマ区切りリストを指定します。指定されている場合、ラグの計算時にリスト内の ID のみが考慮されます。引用符で囲まれた文字列値として指定する必要があります。デフォルトでは、すべてのパーティションが考慮されます。
- 13
- オプション: Kafka に TSL クライアント認証を使用するかどうかを指定します。デフォルトは
disableです。TLS の設定の詳細は、「カスタムメトリクスオートスケーラートリガー認証について」を参照してください。
3.4.5. Cron トリガーについて
Pod は時間範囲に基づいてスケーリングできます。
時間範囲の開始時に、カスタムメトリクスオートスケーラーが、オブジェクトに関連する Pod を、設定された最小 Pod 数から指定された必要な Pod 数にスケーリングします。時間範囲の終了時に、Pod は設定された最小値にスケールダウンされます。期間は cron 形式 で設定する必要があります。
次の例では、この scaled object に関連する Pod を、インド標準時の午前 6 時から午後 6 時 30 分まで 0 から 100 にスケーリングします。
Cron トリガーを使用した scaled object の例
apiVersion: keda.sh/v1alpha1
kind: ScaledObject
metadata:
name: cron-scaledobject
namespace: default
spec:
scaleTargetRef:
name: my-deployment
minReplicaCount: 0
maxReplicaCount: 100
cooldownPeriod: 300
triggers:
- type: cron
metadata:
timezone: Asia/Kolkata
start: "0 6 * * *"
end: "30 18 * * *"
desiredReplicas: "100" - 1
- 時間枠の終了時にスケールダウンする Pod の最小数を指定します。
- 2
- スケールアップ時のレプリカの最大数を指定します。この値は
desiredReplicasと同じである必要があります。デフォルトは100です。 - 3
- Cron トリガーを指定します。
- 4
- 時間枠のタイムゾーンを指定します。この値は、IANA Time Zone Database から取得する必要があります。
- 5
- 時間枠の始点を指定します。
- 6
- 時間枠の終点を指定します。
- 7
- 時間枠の始点から終点までの間にスケーリングする Pod の数を指定します。この値は
maxReplicaCountと同じである必要があります。
3.4.6. Kubernetes ワークロードトリガーを理解する
特定のラベルセレクターに一致する Pod の数に基づいて Pod をスケーリングできます。
Custom Metrics Autoscaler Operator は、同じ namespace にある特定のラベルが付いた Pod の数を追跡し、ラベル付き Pod の数に基づいて scaled object の Pod との 関係 を計算します。この関係を使用して、Custom Metrics Autoscaler Operator は、ScaledObject または ScaledJob 仕様のスケーリングポリシーに従ってオブジェクトをスケーリングします。
Pod 数には、Succeeded フェーズまたは Failed フェーズの Pod が含まれます。
たとえば、frontend デプロイメントと backend デプロイメントがあるとします。kubernetes-workload トリガーを使用すると、frontend Pod の数に基づいて backend デプロイメントをスケーリングできます。frontend Pod の数が増えると、Operator は指定された比率を維持するために backend Pod をスケーリングします。この例では、app=frontend Pod セレクターを持つ Pod が 10 個ある場合、Operator は、scaled object で設定された 0.5 の比率を維持するために、バックエンド Pod を 5 にスケーリングします。
Kubernetes ワークロードトリガーを使用した scaled object の例
apiVersion: keda.sh/v1alpha1
kind: ScaledObject
metadata:
name: workload-scaledobject
namespace: my-namespace
spec:
triggers:
- type: kubernetes-workload
metadata:
podSelector: 'app=frontend'
value: '0.5'
activationValue: '3.1' 3.5. カスタムメトリクスオートスケーラートリガー認証について
トリガー認証を使用すると、関連付けられたコンテナーで使用できるスケーリングされたオブジェクトまたはスケーリングされたジョブに認証情報を含めることができます。トリガー認証を使用して、Red Hat OpenShift Service on AWS シークレット、プラットフォームネイティブの Pod 認証メカニズム、環境変数などを渡すことができます。
スケーリングするオブジェクトと同じ namespace に TriggerAuthentication オブジェクトを定義します。そのトリガー認証は、その namespace 内のオブジェクトによってのみ使用できます。
または、複数の namespace のオブジェクト間で認証情報を共有するには、すべての namespace で使用できる ClusterTriggerAuthentication オブジェクトを作成できます。
トリガー認証とクラスタートリガー認証は同じ設定を使用します。ただし、クラスタートリガー認証では、スケーリングされたオブジェクトの認証参照に追加の kind パラメーターが必要です。
バインドされたサービスアカウントトークンを使用するトリガー認証の例
kind: TriggerAuthentication
apiVersion: keda.sh/v1alpha1
metadata:
name: secret-triggerauthentication
namespace: my-namespace
spec:
boundServiceAccountToken:
- parameter: bearerToken
serviceAccountName: thanos バインドされたサービスアカウントトークンを使用するクラスタートリガー認証の例
kind: ClusterTriggerAuthentication
apiVersion: keda.sh/v1alpha1
metadata:
name: bound-service-account-token-triggerauthentication
spec:
boundServiceAccountToken:
- parameter: bearerToken
serviceAccountName: thanos Basic 認証にシークレットを使用するトリガー認証の例
kind: TriggerAuthentication
apiVersion: keda.sh/v1alpha1
metadata:
name: secret-triggerauthentication
namespace: my-namespace
spec:
secretTargetRef:
- parameter: username
name: my-basic-secret
key: username
- parameter: password
name: my-basic-secret
key: passwordBasic 認証のシークレットの例
apiVersion: v1
kind: Secret
metadata:
name: my-basic-secret
namespace: default
data:
username: "dXNlcm5hbWU="
password: "cGFzc3dvcmQ="- 1
- トリガー認証に提供するユーザー名とパスワード。
dataスタンザ内の値は、Base64 でエンコードされている必要があります。
CA の詳細にシークレットを使用するトリガー認証の例
kind: TriggerAuthentication
apiVersion: keda.sh/v1alpha1
metadata:
name: secret-triggerauthentication
namespace: my-namespace
spec:
secretTargetRef:
- parameter: key
name: my-secret
key: client-key.pem
- parameter: ca
name: my-secret
key: ca-cert.pem - 1
- スケーリングするオブジェクトの namespace を指定します。
- 2
- このトリガー認証では、メトリクスエンドポイントに接続するときに、認可にシークレットを使用することを指定します。
- 3
- 使用する認証の種類を指定します。
- 4
- 使用するシークレットの名前を指定します。
- 5
- 指定されたパラメーターで使用するシークレットのキーを指定します。
- 6
- メトリクスエンドポイントに接続するときに、カスタム CA の認証パラメーターを指定します。
- 7
- 使用するシークレットの名前を指定します。認証局 (CA) の詳細を含む次のシークレットの例を参照してください。
- 8
- 指定されたパラメーターで使用するシークレットのキーを指定します。
認証局 (CA) の詳細を含むシークレットの例
apiVersion: v1
kind: Secret
metadata:
name: my-secret
namespace: my-namespace
data:
ca-cert.pem: LS0tLS1CRUdJTiBDRVJUSUZJQ0FURS0tLS0...
client-cert.pem: LS0tLS1CRUdJTiBDRVJUSUZJQ0FURS0...
client-key.pem: LS0tLS1CRUdJTiBQUklWQVRFIEtFWS0t...ベアラートークンを使用するトリガー認証の例
kind: TriggerAuthentication
apiVersion: keda.sh/v1alpha1
metadata:
name: token-triggerauthentication
namespace: my-namespace
spec:
secretTargetRef:
- parameter: bearerToken
name: my-secret
key: bearerToken ベアラートークンのシークレットの例
apiVersion: v1
kind: Secret
metadata:
name: my-secret
namespace: my-namespace
data:
bearerToken: "<bearer_token>" - 1
- ベアラー認証で使用するベアラートークンを指定します。値は Base64 でエンコードされている必要があります。
環境変数を使用するトリガー認証の例
kind: TriggerAuthentication
apiVersion: keda.sh/v1alpha1
metadata:
name: env-var-triggerauthentication
namespace: my-namespace
spec:
env:
- parameter: access_key
name: ACCESS_KEY
containerName: my-container Pod 認証プロバイダーを使用するトリガー認証の例
kind: TriggerAuthentication
apiVersion: keda.sh/v1alpha1
metadata:
name: pod-id-triggerauthentication
namespace: my-namespace
spec:
podIdentity:
provider: aws-eks 3.5.1. トリガー認証の使用
トリガー認証とクラスタートリガー認証は、カスタムリソースを使用して認証を作成し、スケーリングされたオブジェクトまたはスケーリングされたジョブへの参照を追加することで使用します。
前提条件
- Custom Metrics Autoscaler Operator をインストールしている。
- バインドされたサービスアカウントトークンを使用している場合は、サービスアカウントが存在している必要があります。
バインドされたサービスアカウントトークンを使用している場合は、Custom Metrics Autoscaler Operator がサービスアカウントからサービスアカウントトークンを要求できるようにするロールベースのアクセス制御 (RBAC) オブジェクトが存在する必要があります。
apiVersion: rbac.authorization.k8s.io/v1 kind: Role metadata: name: keda-operator-token-creator namespace: <namespace_name>1 rules: - apiGroups: - "" resources: - serviceaccounts/token verbs: - create resourceNames: - thanos2 --- apiVersion: rbac.authorization.k8s.io/v1 kind: RoleBinding metadata: name: keda-operator-token-creator-binding namespace: <namespace_name>3 roleRef: apiGroup: rbac.authorization.k8s.io kind: Role name: keda-operator-token-creator subjects: - kind: ServiceAccount name: keda-operator namespace: openshift-keda-
シークレットを使用している場合は、
Secretオブジェクトが存在している必要があります。
手順
TriggerAuthenticationまたはClusterTriggerAuthenticationオブジェクトを作成します。オブジェクトを定義する YAML ファイルを作成します。
バインドされたサービスアカウントトークンを使用したトリガー認証の例
kind: TriggerAuthentication apiVersion: keda.sh/v1alpha1 metadata: name: prom-triggerauthentication namespace: my-namespace1 spec: boundServiceAccountToken:2 - parameter: token serviceAccountName: thanos3 TriggerAuthenticationオブジェクトを作成します。$ oc create -f <filename>.yaml
トリガー認証を使用する
ScaledObjectYAML ファイルを作成または編集します。次のコマンドを実行して、オブジェクトを定義する YAML ファイルを作成します。
トリガー認証を使用したスケーリングされたオブジェクトの例
apiVersion: keda.sh/v1alpha1 kind: ScaledObject metadata: name: scaledobject namespace: my-namespace spec: scaleTargetRef: name: example-deployment maxReplicaCount: 100 minReplicaCount: 0 pollingInterval: 30 triggers: - type: prometheus metadata: serverAddress: https://thanos-querier.openshift-monitoring.svc.cluster.local:9092 namespace: kedatest # replace <NAMESPACE> metricName: http_requests_total threshold: '5' query: sum(rate(http_requests_total{job="test-app"}[1m])) authModes: "basic" authenticationRef: name: prom-triggerauthentication1 kind: TriggerAuthentication2 クラスタートリガー認証を使用したスケーリングされたオブジェクトの例
apiVersion: keda.sh/v1alpha1 kind: ScaledObject metadata: name: scaledobject namespace: my-namespace spec: scaleTargetRef: name: example-deployment maxReplicaCount: 100 minReplicaCount: 0 pollingInterval: 30 triggers: - type: prometheus metadata: serverAddress: https://thanos-querier.openshift-monitoring.svc.cluster.local:9092 namespace: kedatest # replace <NAMESPACE> metricName: http_requests_total threshold: '5' query: sum(rate(http_requests_total{job="test-app"}[1m])) authModes: "basic" authenticationRef: name: prom-cluster-triggerauthentication1 kind: ClusterTriggerAuthentication2 次のコマンドを実行して、スケーリングされたオブジェクトを作成します。
$ oc apply -f <filename>
3.6. カスタムメトリクスオートスケーラーの追加方法について
カスタムメトリクスオートスケーラーを追加するには、デプロイメント、ステートフルセット、またはカスタムリソース用の ScaledObject カスタムリソースを作成します。ジョブの ScaledJob カスタムリソースを作成します。
スケーリングするワークロードごとに、スケーリングされたオブジェクトを 1 つだけ作成できます。スケーリングされたオブジェクトと Horizontal Pod Autoscaler (HPA) は、同じワークロードで使用できません。
3.6.1. ワークロードへのカスタムメトリクスオートスケーラーの追加
Deployment、StatefulSet、または custom resource オブジェクトによって作成されるワークロード用のカスタムメトリクスオートスケーラーを作成できます。
前提条件
- Custom Metrics Autoscaler Operator をインストールしている。
CPU またはメモリーに基づくスケーリングにカスタムメトリクスオートスケーラーを使用する場合:
クラスター管理者は、クラスターメトリクスを適切に設定する必要があります。メトリクスが設定されているかどうかは、
oc describe PodMetrics <pod-name>コマンドを使用して判断できます。メトリクスが設定されている場合、出力は以下の Usage の下にある CPU と Memory のように表示されます。$ oc describe PodMetrics openshift-kube-scheduler-ip-10-0-135-131.ec2.internal出力例
Name: openshift-kube-scheduler-ip-10-0-135-131.ec2.internal Namespace: openshift-kube-scheduler Labels: <none> Annotations: <none> API Version: metrics.k8s.io/v1beta1 Containers: Name: wait-for-host-port Usage: Memory: 0 Name: scheduler Usage: Cpu: 8m Memory: 45440Ki Kind: PodMetrics Metadata: Creation Timestamp: 2019-05-23T18:47:56Z Self Link: /apis/metrics.k8s.io/v1beta1/namespaces/openshift-kube-scheduler/pods/openshift-kube-scheduler-ip-10-0-135-131.ec2.internal Timestamp: 2019-05-23T18:47:56Z Window: 1m0s Events: <none>スケーリングするオブジェクトに関連付けられた Pod には、指定されたメモリーと CPU の制限が含まれている必要があります。以下に例を示します。
Pod 仕様の例
apiVersion: v1 kind: Pod # ... spec: containers: - name: app image: images.my-company.example/app:v4 resources: limits: memory: "128Mi" cpu: "500m" # ...
手順
以下のような YAML ファイルを作成します。名前
<2>、オブジェクト名<4>、およびオブジェクトの種類<5>のみが必要です。スケーリングされたオブジェクトの例
apiVersion: keda.sh/v1alpha1 kind: ScaledObject metadata: annotations: autoscaling.keda.sh/paused-replicas: "0"1 name: scaledobject2 namespace: my-namespace spec: scaleTargetRef: apiVersion: apps/v13 name: example-deployment4 kind: Deployment5 envSourceContainerName: .spec.template.spec.containers[0]6 cooldownPeriod: 2007 maxReplicaCount: 1008 minReplicaCount: 09 metricsServer:10 auditConfig: logFormat: "json" logOutputVolumeClaim: "persistentVolumeClaimName" policy: rules: - level: Metadata omitStages: "RequestReceived" omitManagedFields: false lifetime: maxAge: "2" maxBackup: "1" maxSize: "50" fallback:11 failureThreshold: 3 replicas: 6 behavior: static12 pollingInterval: 3013 advanced: restoreToOriginalReplicaCount: false14 horizontalPodAutoscalerConfig: name: keda-hpa-scale-down15 behavior:16 scaleDown: stabilizationWindowSeconds: 300 policies: - type: Percent value: 100 periodSeconds: 15 triggers: - type: prometheus17 metadata: serverAddress: https://thanos-querier.openshift-monitoring.svc.cluster.local:9092 namespace: kedatest metricName: http_requests_total threshold: '5' query: sum(rate(http_requests_total{job="test-app"}[1m])) authModes: basic authenticationRef:18 name: prom-triggerauthentication kind: TriggerAuthentication- 1
- オプション: 「ワークロードのカスタムメトリクスオートスケーラーの一時停止」セクションで説明されているように、Custom Metrics Autoscaler Operator がレプリカを指定された値にスケーリングし、自動スケーリングを停止するよう指定します。
- 2
- このカスタムメトリクスオートスケーラーの名前を指定します。
- 3
- オプション: ターゲットリソースの API バージョンを指定します。デフォルトは
apps/v1です。 - 4
- スケーリングするオブジェクトの名前を指定します。
- 5
kindをDeployment、StatefulSetまたはCustomResourceとして指定します。- 6
- オプション: カスタムメトリクスオートスケーラーがシークレットなどを保持する環境変数を取得する、ターゲットリソース内のコンテナーの名前を指定します。デフォルトは
.spec.template.spec.containers[0]です。 - 7
- オプション:
minReplicaCountが0に設定されている場合、最後のトリガーが報告されてからデプロイメントを0にスケールバックするまでの待機時間を秒単位で指定します。デフォルトは300です。 - 8
- オプション: スケールアップ時のレプリカの最大数を指定します。デフォルトは
100です。 - 9
- オプション: スケールダウン時のレプリカの最小数を指定します。
- 10
- オプション: 「監査ログの設定」セクションで説明されているように、監査ログのパラメーターを指定します。
- 11
- オプション:
failureThresholdパラメーターで定義された回数だけスケーラーがソースからメトリクスを取得できなかった場合に、フォールバックするレプリカの数を指定します。フォールバック動作の詳細は、KEDA のドキュメント を参照してください。 - 12
- オプション: フォールバックが発生した場合に使用するレプリカ数を指定します。次のいずれかのオプションを入力するか、パラメーターを省略します。
-
fallback.replicasパラメーターで指定されたレプリカの数を使用するには、staticと入力します。これがデフォルトです。 -
現在のレプリカ数を維持するには、
currentReplicasと入力します。 -
現在のレプリカ数が
fallback.replicasパラメーターより大きい場合は、currentReplicasIfHigherと入力して、現在のレプリカ数を維持します。現在のレプリカ数がfallback.replicasパラメーターより少ない場合は、fallback.replicas値を使用します。 -
現在のレプリカ数が
fallback.replicasパラメーターより少ない場合は、currentReplicasIfLowerと入力して、現在のレプリカ数を維持します。現在のレプリカ数がfallback.replicasパラメーターより大きい場合は、fallback.replicas値を使用します。
-
- 13
- オプション: 各トリガーをチェックする間隔を秒単位で指定します。デフォルトは
30です。 - 14
- オプション: スケーリングされたオブジェクトが削除された後に、ターゲットリソースを元のレプリカ数にスケールバックするかどうかを指定します。デフォルトは
falseで、スケーリングされたオブジェクトが削除されたときのレプリカ数をそのまま保持します。 - 15
- オプション: Horizontal Pod Autoscaler の名前を指定します。デフォルトは
keda-hpa-{scaled-object-name}です。 - 16
- オプション: 「スケーリングポリシー」セクションで説明されているように、Pod をスケールアップまたはスケールダウンするレートを制御するために使用するスケーリングポリシーを指定します。
- 17
- 「カスタムメトリクスオートスケーラートリガーについて」セクションで説明されているように、スケーリングの基準として使用するトリガーを指定します。この例では、Red Hat OpenShift Service on AWS モニタリングを使用します。
- 18
- オプション: トリガー認証またはクラスタートリガー認証を指定します。詳細は、関連情報 セクションの カスタムメトリクスオートスケーラー認証について を参照してください。
-
トリガー認証を使用するには、
TriggerAuthenticationと入力します。これがデフォルトです。 -
クラスタートリガー認証を使用するには、
ClusterTriggerAuthenticationと入力します。
-
トリガー認証を使用するには、
次のコマンドを実行して、カスタムメトリクスオートスケーラーを作成します。
$ oc create -f <filename>.yaml
検証
コマンド出力を表示して、カスタムメトリクスオートスケーラーが作成されたことを確認します。
$ oc get scaledobject <scaled_object_name>出力例
NAME SCALETARGETKIND SCALETARGETNAME MIN MAX TRIGGERS AUTHENTICATION READY ACTIVE FALLBACK AGE scaledobject apps/v1.Deployment example-deployment 0 50 prometheus prom-triggerauthentication True True True 17s出力の次のフィールドに注意してください。
-
TRIGGERS: 使用されているトリガーまたはスケーラーを示します。 -
AUTHENTICATION: 使用されているトリガー認証の名前を示します。 READY: スケーリングされたオブジェクトがスケーリングを開始する準備ができているかどうかを示します。-
Trueの場合、スケーリングされたオブジェクトの準備は完了しています。 -
Falseの場合、作成したオブジェクトの 1 つ以上に問題があるため、スケーリングされたオブジェクトの準備は完了していません。
-
ACTIVE: スケーリングが行われているかどうかを示します。-
Trueの場合、スケーリングが行われています。 -
Falseの場合、メトリクスがないか、作成したオブジェクトの 1 つ以上に問題があるため、スケーリングは行われていません。
-
FALLBACK: カスタムメトリクスオートスケーラーがソースからメトリクスを取得できるかどうかを示します。-
Falseの場合、カスタムメトリクスオートスケーラーはメトリクスを取得しています。 -
Trueの場合、メトリクスがないか、作成したオブジェクトの 1 つ以上に問題があるため、カスタムメトリクスオートスケーラーはメトリクスを取得しています。
-
-
3.7. スケーリングされたオブジェクトのカスタムメトリクスオートスケーラーの一時停止
必要に応じて、ワークロードの自動スケーリングを一時停止および再開できます。
たとえば、クラスターのメンテナンスを実行する前に自動スケーリングを一時停止したり、ミッションクリティカルではないワークロードを削除してリソース不足を回避したりできます。
3.7.1. カスタムメトリクスオートスケーラーの一時停止
スケーリングされたオブジェクトの自動スケーリングを一時停止するには、そのスケーリングされたオブジェクトのカスタムメトリクスオートスケーラーに autoscaling.keda.sh/paused-replicas アノテーションを追加します。カスタムメトリクスオートスケーラーは、そのワークロードのレプリカを指定された値にスケーリングし、アノテーションが削除されるまで自動スケーリングを一時停止します。
apiVersion: keda.sh/v1alpha1
kind: ScaledObject
metadata:
annotations:
autoscaling.keda.sh/paused-replicas: "4"
# ...手順
次のコマンドを使用して、ワークロードの
ScaledObjectCR を編集します。$ oc edit ScaledObject scaledobjectautoscaling.keda.sh/paused-replicasアノテーションに任意の値を追加します。apiVersion: keda.sh/v1alpha1 kind: ScaledObject metadata: annotations: autoscaling.keda.sh/paused-replicas: "4"1 creationTimestamp: "2023-02-08T14:41:01Z" generation: 1 name: scaledobject namespace: my-project resourceVersion: '65729' uid: f5aec682-acdf-4232-a783-58b5b82f5dd0- 1
- Custom Metrics Autoscaler Operator がレプリカを指定された値にスケーリングし、自動スケーリングを停止するよう指定します。
3.7.2. スケーリングされたオブジェクトのカスタムメトリクスオートスケーラーの再開
一時停止されたカスタムメトリクスオートスケーラーを再開するには、その ScaledObject の autoscaling.keda.sh/paused-replicas アノテーションを削除します。
apiVersion: keda.sh/v1alpha1
kind: ScaledObject
metadata:
annotations:
autoscaling.keda.sh/paused-replicas: "4"
# ...手順
次のコマンドを使用して、ワークロードの
ScaledObjectCR を編集します。$ oc edit ScaledObject scaledobjectautoscaling.keda.sh/paused-replicasアノテーションを削除します。apiVersion: keda.sh/v1alpha1 kind: ScaledObject metadata: annotations: autoscaling.keda.sh/paused-replicas: "4"1 creationTimestamp: "2023-02-08T14:41:01Z" generation: 1 name: scaledobject namespace: my-project resourceVersion: '65729' uid: f5aec682-acdf-4232-a783-58b5b82f5dd0- 1
- このアノテーションを削除して、一時停止されたカスタムメトリクスオートスケーラーを再開します。
3.8. 監査ログの収集
システムに影響を与えた一連のアクティビティーを個別のユーザー、管理者その他システムのコンポーネント別に記述したセキュリティー関連の時系列のレコードを提供する、監査ログを収集できます。
たとえば、監査ログは、自動スケーリングリクエストの送信元を理解するのに役立ちます。これは、ユーザーアプリケーションによる自動スケーリングリクエストによってバックエンドが過負荷になり、問題のあるアプリケーションを特定する必要がある場合に重要な情報です。
3.8.1. 監査ログの設定
KedaController カスタムリソースを編集することで、Custom Metrics Autoscaler Operator の監査を設定できます。ログは、KedaController CR の永続ボリューム要求を使用して保護されたボリューム上の監査ログファイルに送信されます。
前提条件
- Custom Metrics Autoscaler Operator をインストールしている。
手順
KedaControllerカスタムリソースを編集して、auditConfigスタンザを追加します。kind: KedaController apiVersion: keda.sh/v1alpha1 metadata: name: keda namespace: keda spec: # ... metricsServer: # ... auditConfig: logFormat: "json"1 logOutputVolumeClaim: "pvc-audit-log"2 policy: rules:3 - level: Metadata omitStages: "RequestReceived"4 omitManagedFields: false5 lifetime:6 maxAge: "2" maxBackup: "1" maxSize: "50"- 1
- 監査ログの出力形式を
legacyまたはjsonのいずれかで指定します。 - 2
- ログデータを格納するための既存の永続ボリューム要求を指定します。API サーバーに送信されるすべてのリクエストは、この永続ボリューム要求に記録されます。このフィールドを空のままにすると、ログデータは stdout に送信されます。
- 3
- どのイベントを記録し、どのデータを含めるかを指定します。
-
None: イベントをログに記録しません。 -
Metadata: ユーザー、タイムスタンプなど、リクエストのメタデータのみをログに記録します。リクエストテキストとレスポンステキストはログに記録しません。これがデフォルトです。 -
Request: メタデータと要求テキストのみをログに記録しますが、応答テキストはログに記録しません。このオプションは、リソース以外の要求には適用されません。 -
RequestResponse: イベントのメタデータ、要求テキスト、および応答テキストをログに記録します。このオプションは、リソース以外の要求には適用されません。
-
- 4
- イベントを作成しないステージを指定します。
- 5
- リクエストボディーとレスポンスボディーのマネージドフィールドを API 監査ログに書き込まれないようにするかどうかを指定します。フィールドを省略する場合は
true、フィールドを含める場合はfalseを指定します。 - 6
- 監査ログのサイズと有効期間を指定します。
-
maxAge: ファイル名にエンコードされたタイムスタンプに基づく、監査ログファイルを保持する最大日数。 -
maxBackup: 保持する監査ログファイルの最大数。すべての監査ログファイルを保持するには、0に設定します。 -
maxSize: ローテーションされる前の監査ログファイルの最大サイズ (メガバイト単位)。
-
検証
監査ログファイルを直接表示します。
keda-metrics-apiserver-*Pod の名前を取得します。oc get pod -n keda出力例
NAME READY STATUS RESTARTS AGE custom-metrics-autoscaler-operator-5cb44cd75d-9v4lv 1/1 Running 0 8m20s keda-metrics-apiserver-65c7cc44fd-rrl4r 1/1 Running 0 2m55s keda-operator-776cbb6768-zpj5b 1/1 Running 0 2m55s次のようなコマンドを使用して、ログデータを表示します。
$ oc logs keda-metrics-apiserver-<hash>|grep -i metadata1 - 1
- オプション:
grepコマンドを使用して、表示するログレベル (Metadata、Request、RequestResponse) を指定できます。
以下に例を示します。
$ oc logs keda-metrics-apiserver-65c7cc44fd-rrl4r|grep -i metadata出力例
... {"kind":"Event","apiVersion":"audit.k8s.io/v1","level":"Metadata","auditID":"4c81d41b-3dab-4675-90ce-20b87ce24013","stage":"ResponseComplete","requestURI":"/healthz","verb":"get","user":{"username":"system:anonymous","groups":["system:unauthenticated"]},"sourceIPs":["10.131.0.1"],"userAgent":"kube-probe/1.28","responseStatus":{"metadata":{},"code":200},"requestReceivedTimestamp":"2023-02-16T13:00:03.554567Z","stageTimestamp":"2023-02-16T13:00:03.555032Z","annotations":{"authorization.k8s.io/decision":"allow","authorization.k8s.io/reason":""}} ...
または、特定のログを表示できます。
次のようなコマンドを使用して、
keda-metrics-apiserver-*Pod にログインします。$ oc rsh pod/keda-metrics-apiserver-<hash> -n keda以下に例を示します。
$ oc rsh pod/keda-metrics-apiserver-65c7cc44fd-rrl4r -n keda/var/audit-policy/ディレクトリーに移動します。sh-4.4$ cd /var/audit-policy/利用可能なログを一覧表示します。
sh-4.4$ ls出力例
log-2023.02.17-14:50 policy.yaml必要に応じてログを表示します。
sh-4.4$ cat <log_name>/<pvc_name>|grep -i <log_level>1 - 1
- オプション:
grepコマンドを使用して、表示するログレベル (Metadata、Request、RequestResponse) を指定できます。
以下に例を示します。
sh-4.4$ cat log-2023.02.17-14:50/pvc-audit-log|grep -i Request出力例
... {"kind":"Event","apiVersion":"audit.k8s.io/v1","level":"Request","auditID":"63e7f68c-04ec-4f4d-8749-bf1656572a41","stage":"ResponseComplete","requestURI":"/openapi/v2","verb":"get","user":{"username":"system:aggregator","groups":["system:authenticated"]},"sourceIPs":["10.128.0.1"],"responseStatus":{"metadata":{},"code":304},"requestReceivedTimestamp":"2023-02-17T13:12:55.035478Z","stageTimestamp":"2023-02-17T13:12:55.038346Z","annotations":{"authorization.k8s.io/decision":"allow","authorization.k8s.io/reason":"RBAC: allowed by ClusterRoleBinding \"system:discovery\" of ClusterRole \"system:discovery\" to Group \"system:authenticated\""}} ...
3.9. デバッグデータの収集
サポートケースを作成する際、ご使用のクラスターのデバッグ情報を Red Hat サポートに提供していただくと Red Hat のサポートに役立ちます。
問題のトラブルシューティングに使用するため、以下の情報を提供してください。
-
must-gatherツールを使用して収集されるデータ。 - 一意のクラスター ID。
must-gather ツールを使用して、以下を含む Custom Metrics Autoscaler Operator とそのコンポーネントに関するデータを収集できます。
-
kedanamespace とその子オブジェクト。 - Custom Metric Autoscaler Operator のインストールオブジェクト。
- Custom Metric Autoscaler Operator の CRD オブジェクト。
3.9.1. デバッグデータの収集
以下のコマンドは、Custom Metrics Autoscaler Operator の must-gather ツールを実行します。
$ oc adm must-gather --image="$(oc get packagemanifests openshift-custom-metrics-autoscaler-operator \
-n openshift-marketplace \
-o jsonpath='{.status.channels[?(@.name=="stable")].currentCSVDesc.annotations.containerImage}')"
標準の Red Hat OpenShift Service on AWS の must-gather コマンドである oc adm must-gather は、Custom Metrics Autoscaler Operator のデータを収集しません。
前提条件
-
Red Hat OpenShift Service on AWS に、
dedicated-adminロールを持つユーザーとしてログインしている。 -
Red Hat OpenShift Service on AWS CLI (
oc) がインストールされている。
手順
-
must-gatherデータを保存するディレクトリーに移動します。 以下のいずれかを実行します。
Custom Metrics Autoscaler Operator の
must-gatherデータのみを取得するには、以下のコマンドを使用します。$ oc adm must-gather --image="$(oc get packagemanifests openshift-custom-metrics-autoscaler-operator \ -n openshift-marketplace \ -o jsonpath='{.status.channels[?(@.name=="stable")].currentCSVDesc.annotations.containerImage}')"must-gatherコマンドのカスタムイメージは、Operator パッケージマニフェストから直接プルされます。そうすることで、Custom Metric Autoscaler Operator が利用可能なクラスター上で機能します。Custom Metric Autoscaler Operator 情報に加えてデフォルトの
must-gatherデータを収集するには、以下を実行します。以下のコマンドを使用して Custom Metrics Autoscaler Operator イメージを取得し、これを環境変数として設定します。
$ IMAGE="$(oc get packagemanifests openshift-custom-metrics-autoscaler-operator \ -n openshift-marketplace \ -o jsonpath='{.status.channels[?(@.name=="stable")].currentCSVDesc.annotations.containerImage}')"Custom Metrics Autoscaler Operator イメージで
oc adm must-gatherを使用するには、以下を実行します。$ oc adm must-gather --image-stream=openshift/must-gather --image=${IMAGE}
例3.1 Custom Metric Autoscaler の must-gather 出力の例
└── keda ├── apps │ ├── daemonsets.yaml │ ├── deployments.yaml │ ├── replicasets.yaml │ └── statefulsets.yaml ├── apps.openshift.io │ └── deploymentconfigs.yaml ├── autoscaling │ └── horizontalpodautoscalers.yaml ├── batch │ ├── cronjobs.yaml │ └── jobs.yaml ├── build.openshift.io │ ├── buildconfigs.yaml │ └── builds.yaml ├── core │ ├── configmaps.yaml │ ├── endpoints.yaml │ ├── events.yaml │ ├── persistentvolumeclaims.yaml │ ├── pods.yaml │ ├── replicationcontrollers.yaml │ ├── secrets.yaml │ └── services.yaml ├── discovery.k8s.io │ └── endpointslices.yaml ├── image.openshift.io │ └── imagestreams.yaml ├── k8s.ovn.org │ ├── egressfirewalls.yaml │ └── egressqoses.yaml ├── keda.sh │ ├── kedacontrollers │ │ └── keda.yaml │ ├── scaledobjects │ │ └── example-scaledobject.yaml │ └── triggerauthentications │ └── example-triggerauthentication.yaml ├── monitoring.coreos.com │ └── servicemonitors.yaml ├── networking.k8s.io │ └── networkpolicies.yaml ├── keda.yaml ├── pods │ ├── custom-metrics-autoscaler-operator-58bd9f458-ptgwx │ │ ├── custom-metrics-autoscaler-operator │ │ │ └── custom-metrics-autoscaler-operator │ │ │ └── logs │ │ │ ├── current.log │ │ │ ├── previous.insecure.log │ │ │ └── previous.log │ │ └── custom-metrics-autoscaler-operator-58bd9f458-ptgwx.yaml │ ├── custom-metrics-autoscaler-operator-58bd9f458-thbsh │ │ └── custom-metrics-autoscaler-operator │ │ └── custom-metrics-autoscaler-operator │ │ └── logs │ ├── keda-metrics-apiserver-65c7cc44fd-6wq4g │ │ ├── keda-metrics-apiserver │ │ │ └── keda-metrics-apiserver │ │ │ └── logs │ │ │ ├── current.log │ │ │ ├── previous.insecure.log │ │ │ └── previous.log │ │ └── keda-metrics-apiserver-65c7cc44fd-6wq4g.yaml │ └── keda-operator-776cbb6768-fb6m5 │ ├── keda-operator │ │ └── keda-operator │ │ └── logs │ │ ├── current.log │ │ ├── previous.insecure.log │ │ └── previous.log │ └── keda-operator-776cbb6768-fb6m5.yaml ├── policy │ └── poddisruptionbudgets.yaml └── route.openshift.io └── routes.yaml作業ディレクトリーに作成された
must-gatherディレクトリーから圧縮ファイルを作成します。たとえば、Linux オペレーティングシステムを使用するコンピューターで以下のコマンドを実行します。$ tar cvaf must-gather.tar.gz must-gather.local.5421342344627712289/1 - 1
must-gather-local.5421342344627712289/を実際のディレクトリー名に置き換えます。
- 圧縮ファイルを Red Hat カスタマーポータル で作成したサポートケースに添付します。
3.10. Operator メトリクスの表示
Custom Metrics Autoscaler Operator は、クラスター上のモニタリングコンポーネントからプルした、すぐに使用可能なメトリクスを公開します。Prometheus Query Language (PromQL) を使用してメトリクスをクエリーし、問題を分析および診断できます。コントローラー Pod の再起動時にすべてのメトリクスがリセットされます。
3.10.1. パフォーマンスメトリクスへのアクセス
Red Hat OpenShift Service on AWS Web コンソールを使用し、メトリクスにアクセスしてクエリーを実行できます。
手順
- Red Hat OpenShift Service on AWS Web コンソールで Administrator パースペクティブを選択します。
- Observe → Metrics の順に選択します。
- カスタムクエリーを作成するには、PromQL クエリーを Expression フィールドに追加します。
- 複数のクエリーを追加するには、Add Query を選択します。
3.10.1.1. 提供される Operator メトリクス
Custom Metrics Autoscaler Operator は、以下のメトリクスを公開します。メトリクスは、Red Hat OpenShift Service on AWS Web コンソールを使用して表示できます。
| メトリクス名 | 説明 |
|---|---|
|
|
特定のスケーラーがアクティブか非アクティブかを示します。値が |
|
| 各スケーラーのメトリクスの現在の値。ターゲットの平均を計算する際に Horizontal Pod Autoscaler (HPA) によって使用されます。 |
|
| 各スケーラーから現在のメトリクスを取得する際のレイテンシー。 |
|
| 各スケーラーで発生したエラーの数。 |
|
| すべてのスケーラーで発生したエラーの合計数。 |
|
| スケーリングされた各オブジェクトで発生したエラーの数。 |
|
| 各カスタムリソースタイプの各 namespace における Custom Metrics Autoscaler カスタムリソースの合計数。 |
|
| トリガータイプごとのトリガー合計数。 |
Custom Metrics Autoscaler Admission Webhook メトリクス
Custom Metrics Autoscaler Admission Webhook は、以下の Prometheus メトリクスも公開します。
| メトリクス名 | 説明 |
|---|---|
|
| スケーリングされたオブジェクトの検証数。 |
|
| 検証エラーの数。 |
3.11. Custom Metrics Autoscaler Operator の削除
Red Hat OpenShift Service on AWS クラスターからカスタムメトリクスオートスケーラーを削除できます。Custom Metrics Autoscaler Operator を削除した後、潜在的な問題を回避するために、Operator に関連付けられている他のコンポーネントを削除します。
最初に KedaController カスタムリソース (CR) を削除します。KedaController CR を削除しないと、keda プロジェクトを削除するときに Red Hat OpenShift Service on AWS がハングする可能性があります。CR を削除する前に Custom Metrics Autoscaler Operator を削除すると、CR を削除することはできません。
3.11.1. Custom Metrics Autoscaler Operator のアンインストール
以下の手順を使用して、Red Hat OpenShift Service on AWS クラスターからカスタムメトリクスオートスケーラーを削除します。
前提条件
- Custom Metrics Autoscaler Operator をインストールしている。
手順
- Red Hat OpenShift Service on AWS Web コンソールで、Ecosystem → Installed Operator をクリックします。
- keda プロジェクトに切り替えます。
KedaControllerカスタムリソースを削除します。- CustomMetricsAutoscaler Operator を見つけて、KedaController タブをクリックします。
- カスタムリソースを見つけてから、Delete KedaController をクリックします。
- Uninstall をクリックします。
Custom Metrics Autoscaler Operator を削除します。
- Ecosystem → Installed Operators をクリックします。
-
CustomMetricsAutoscaler Operator を見つけて Options メニュー
 をクリックし、Uninstall Operator を選択します。
をクリックし、Uninstall Operator を選択します。
- Uninstall をクリックします。
オプション: OpenShift CLI を使用して、カスタムメトリクスオートスケーラーのコンポーネントを削除します。
カスタムメトリクスオートスケーラーの CRD を削除します。
-
clustertriggerauthentications.keda.sh -
kedacontrollers.keda.sh -
scaledjobs.keda.sh -
scaledobjects.keda.sh -
triggerauthentications.keda.sh
$ oc delete crd clustertriggerauthentications.keda.sh kedacontrollers.keda.sh scaledjobs.keda.sh scaledobjects.keda.sh triggerauthentications.keda.shCRD を削除すると、関連付けられたロール、クラスターロール、およびロールバインディングが削除されます。ただし、手動で削除する必要のあるクラスターロールがいくつかあります。
-
カスタムメトリクスオートスケーラークラスターのロールをリスト表示します。
$ oc get clusterrole | grep keda.shリスト表示されているカスタムメトリクスオートスケーラークラスターのロールを削除します。以下に例を示します。
$ oc delete clusterrole.keda.sh-v1alpha1-adminカスタムメトリクスオートスケーラークラスターのロールバインディングをリスト表示します。
$ oc get clusterrolebinding | grep keda.shリスト表示されているカスタムメトリクスオートスケーラークラスターのロールバインディングを削除します。以下に例を示します。
$ oc delete clusterrolebinding.keda.sh-v1alpha1-admin
カスタムメトリクスオートスケーラーのプロジェクトを削除します。
$ oc delete project kedaCluster Metric Autoscaler Operator を削除します。
$ oc delete operator/openshift-custom-metrics-autoscaler-operator.keda
第4章 Pod のノードへの配置の制御 (スケジューリング)
4.1. スケジューラーによる Pod 配置の制御
Pod のスケジューリングは、クラスター内のノードへの新規 Pod の配置を決定する内部プロセスです。
スケジューラーコードは、新規 Pod の作成時にそれらを確認し、それらをホストするのに最も適したノードを識別します。次に、マスター API を使用して Pod のバインディング (Pod とノードのバインディング) を作成します。
- デフォルトの Pod スケジューリング
- Red Hat OpenShift Service on AWS には、ほとんどのユーザーのニーズに対応するデフォルトのスケジューラーが付属しています。デフォルトスケジューラーは、Pod に最適なノードを判別するために固有のツールとカスタマイズ可能なツールの両方を使用します。
- 詳細な Pod スケジューリング
新しい Pod の配置場所をより詳細に制御する必要がある場合、Red Hat OpenShift Service on AWS の詳細スケジューリング機能を使用すると、必ずまたは可能な限り、特定ノード上または特定の Pod とともに実行するよう Pod を設定できます。
以下のスケジューリング機能を使用して、Pod の配置を制御できます。
4.1.1. デフォルトスケジューラーについて
Red Hat OpenShift Service on AWS のデフォルトの Pod スケジューラーは、クラスター内のノードへの新しい Pod の配置を決定します。スケジューラーは Pod からのデータを読み取り、設定されるプロファイルに基づいて適切なノードを見つけます。これは完全に独立した機能であり、スタンドアロンソリューションです。Pod を変更することはなく、Pod を特定ノードに関連付ける Pod のバインディングを作成します。
4.1.1.1. デフォルトスケジューリングについて
既存の汎用スケジューラーはプラットフォームで提供されるデフォルトのスケジューラー エンジン であり、Pod をホストするノードを 3 つの手順で選択します。
- ノードのフィルタリング
- 使用可能なノードを、指定された制約または要件に基づいてフィルタリングします。これは、各ノードを predicates または filters と呼ばれるフィルター関数のリストに順番に適用することによって行われます。
- フィルタリングされたノードのリストの優先順位付け
- 優先順位付けは、各ノードに一連の 優先度 または スコアリング 関数を実行することによって行われます。この関数は 0 -10 までのスコアをノードに割り当て、0 は不適切であることを示し、10 は Pod のホストに適していることを示します。スケジューラー設定では、各スコアリング関数について、単純な 重み (正の数値) も取り込むことができます。各スコアリング関数で指定されるノードのスコアは重み (ほとんどのスコアのデフォルトの重みは 1) で乗算され、すべてのスコアで指定されるそれぞれのノードのスコアを追加して組み合わされます。この重み属性は、一部のスコアにより重きを置くようにするなどの目的で管理者によって使用されます。
- 最適ノードの選択
- ノードの並び替えはそれらのスコアに基づいて行われ、最高のスコアを持つノードが Pod をホストするように選択されます。複数のノードに同じ高スコアが付けられている場合、それらのいずれかがランダムに選択されます。
4.1.2. スケジューラーの使用例
Red Hat OpenShift Service on AWS 内でのスケジューリングの重要な使用例として、柔軟なアフィニティーと非アフィニティーポリシーのサポートを挙げることができます。
4.1.2.1. アフィニティー
管理者は、任意のトポロジーレベルまたは複数のレベルでもアフィニティーを指定できるようにスケジューラーを設定することができます。特定レベルのアフィニティーは、同じサービスに属するすべての Pod が同じレベルに属するノードにスケジュールされることを示します。これは、管理者がピア Pod が地理的に離れ過ぎないようにすることでアプリケーションの待機時間の要件に対応します。同じアフィニティーグループ内で Pod をホストするために利用できるノードがない場合、Pod はスケジュールされません。
Pod がスケジュールされる場所をより詳細に制御する必要がある場合は、ノードのアフィニティールールを使用してノードへの Pod の配置を制御する および アフィニティールールとアンチアフィニティールールを使用して、他の Pod を基準にして Pod を配置する を参照してください。
これらの高度なスケジュール機能を使うと、管理者は Pod をスケジュールするノードを指定でき、他の Pod との比較でスケジューリングを実行したり、拒否したりすることができます。
4.1.2.2. アンチアフィニティー
管理者は、任意のトポロジーレベルまたは複数のレベルでもアンチアフィニティーを設定できるようスケジューラーを設定することができます。特定レベルのアンチアフィニティー (または '分散') は、同じサービスに属するすべての Pod が該当レベルに属するノード全体に分散されることを示します。これにより、アプリケーションが高可用性の目的で適正に分散されます。スケジューラーは、可能な限り均等になるようにすべての適用可能なノード全体にサービス Pod を配置しようとします。
Pod がスケジュールされる場所をより詳細に制御する必要がある場合は、ノードのアフィニティールールを使用してノードへの Pod の配置を制御する および アフィニティールールとアンチアフィニティールールを使用して、他の Pod を基準にして Pod を配置する を参照してください。
これらの高度なスケジュール機能を使うと、管理者は Pod をスケジュールするノードを指定でき、他の Pod との比較でスケジューリングを実行したり、拒否したりすることができます。
4.2. アフィニティールールと非アフィニティールールの使用による他の Pod との相対での Pod の配置
アフィニティーとは、スケジュールするノードを制御する Pod の特性です。非アフィニティーとは、Pod がスケジュールされることを拒否する Pod の特性です。
Red Hat OpenShift Service on AWS では、Pod のアフィニティー と Pod の非アフィニティー によって、他の Pod のキー/値ラベルに基づいて、Pod のスケジュールに適したノードを制限できます。
4.2.1. Pod のアフィニティーについて
Pod のアフィニティー と Pod のアンチアフィニティー によって、他の Pod のキー/値ラベルに基づいて、Pod をスケジュールすることに適したノードを制限することができます。
- Pod のアフィニティーはスケジューラーに対し、新規 Pod のラベルセレクターが現在の Pod のラベルに一致する場合に他の Pod と同じノードで新規 Pod を見つけるように指示します。
- Pod のアンチアフィニティーにより、新しい Pod のラベルセレクターが現在の Pod のラベルと一致する場合、スケジューラーが同じラベルを持つ Pod と同じノード上に新しい Pod を配置するのを防ぐことができます。
たとえば、アフィニティールールを使用することで、サービス内で、または他のサービスの Pod との関連で Pod を分散したり、パックしたりすることができます。アンチアフィニティールールを使用すると、特定のサービスの Pod が、そのサービスの Pod のパフォーマンスに干渉することが判明している別のサービスの Pod と同じノードにスケジュールされるのを防止できます。または、関連する障害を減らすために複数のノード、アベイラビリティーゾーン、またはアベイラビリティーセットの間でサービスの Pod を分散することもできます。
ラベルセレクターは、複数の Pod デプロイメントを持つ Pod に一致する可能性があります。アンチアフィニティールールを設定して Pod が一致しないようにする場合は、一意のラベル組み合わせを使用します。
Pod のアフィニティーには、required (必須) および preferred (優先) の 2 つのタイプがあります。
Pod をノードにスケジュールする前に、required (必須) ルールを 満たしている必要があります。preferred (優先) ルールは、ルールを満たす場合に、スケジューラーはルールの実施を試行しますが、その実施が必ずしも保証される訳ではありません。
Pod の優先順位およびプリエンプションの設定により、スケジューラーはアフィニティーの要件に違反しなければ Pod の適切なノードを見つけられない可能性があります。その場合、Pod はスケジュールされない可能性があります。
この状態を防ぐには、優先順位が等しい Pod との Pod のアフィニティーの設定を慎重に行ってください。
Pod のアフィニティー/アンチアフィニティーは Pod 仕様ファイルで設定します。required (必須) ルール、preferred (優先) ルールのいずれか、その両方を指定することができます。両方を指定する場合、ノードは最初に required (必須) ルールを満たす必要があり、その後に preferred (優先) ルールを満たそうとします。
以下の例は、Pod のアフィニティーおよびアンチアフィニティーに設定される Pod 仕様を示しています。
この例では、Pod のアフィニティールールは、ノードにキー security と値 S1 を持つラベルの付いた 1 つ以上の Pod がすでに実行されている場合にのみ Pod をノードにスケジュールできることを示しています。Pod のアンチアフィニティールールは、ノードがキー security と値 S2 を持つラベルが付いた Pod がすでに実行されている場合は Pod をノードにスケジュールしないように設定することを示しています。
Pod のアフィニティーが設定された Pod 設定ファイルのサンプル
apiVersion: v1
kind: Pod
metadata:
name: with-pod-affinity
spec:
securityContext:
runAsNonRoot: true
seccompProfile:
type: RuntimeDefault
affinity:
podAffinity:
requiredDuringSchedulingIgnoredDuringExecution:
- labelSelector:
matchExpressions:
- key: security
operator: In
values:
- S1
topologyKey: topology.kubernetes.io/zone
containers:
- name: with-pod-affinity
image: docker.io/ocpqe/hello-pod
securityContext:
allowPrivilegeEscalation: false
capabilities:
drop: [ALL]Pod のアンチアフィニティーが設定された Pod 設定ファイルのサンプル
apiVersion: v1
kind: Pod
metadata:
name: with-pod-antiaffinity
spec:
securityContext:
runAsNonRoot: true
seccompProfile:
type: RuntimeDefault
affinity:
podAntiAffinity:
preferredDuringSchedulingIgnoredDuringExecution:
- weight: 100
podAffinityTerm:
labelSelector:
matchExpressions:
- key: security
operator: In
values:
- S2
topologyKey: kubernetes.io/hostname
containers:
- name: with-pod-affinity
image: docker.io/ocpqe/hello-pod
securityContext:
allowPrivilegeEscalation: false
capabilities:
drop: [ALL]ノードのラベルに、Pod のノードのアフィニティールールを満たさなくなるような結果になる変更がランタイム時に生じる場合も、Pod はノードで引き続き実行されます。
4.2.2. Pod アフィニティールールの設定
以下の手順は、ラベルの付いた Pod と Pod のスケジュールを可能にするアフィニティーを使用する Pod を作成する 2 つの Pod の単純な設定を示しています。
アフィニティーをスケジュールされた Pod に直接追加することはできません。
手順
Pod 仕様の特定のラベルの付いた Pod を作成します。
以下の内容を含む YAML ファイルを作成します。
apiVersion: v1 kind: Pod metadata: name: security-s1 labels: security: S1 spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: security-s1 image: docker.io/ocpqe/hello-pod securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefaultPod を作成します。
$ oc create -f <pod-spec>.yaml
他の Pod の作成時に、以下のパラメーターを設定してアフィニティーを追加します。
以下の内容を含む YAML ファイルを作成します。
apiVersion: v1 kind: Pod metadata: name: security-s1-east # ... spec: affinity:1 podAffinity: requiredDuringSchedulingIgnoredDuringExecution:2 - labelSelector: matchExpressions: - key: security3 values: - S1 operator: In4 topologyKey: topology.kubernetes.io/zone5 # ...- 1
- Pod のアフィニティーを追加します。
- 2
requiredDuringSchedulingIgnoredDuringExecutionパラメーターまたはpreferredDuringSchedulingIgnoredDuringExecutionパラメーターを設定します。- 3
- 満たす必要のある
keyおよびvaluesを指定します。新規 Pod を他の Pod と共にスケジュールする必要がある場合、最初の Pod のラベルと同じkeyおよびvaluesパラメーターを使用します。 - 4
operatorを指定します。演算子はIn、NotIn、Exists、またはDoesNotExistにすることができます。たとえば、演算子Inを使用してラベルをノードで必要になるようにします。- 5
topologyKeyを指定します。これは、システムがトポロジードメインを表すために使用する事前にデータが設定された Kubernetes ラベル です。
Pod を作成します。
$ oc create -f <pod-spec>.yaml
4.2.3. Pod アンチアフィニティールールの設定
以下の手順は、ラベルの付いた Pod と Pod のスケジュールの禁止を試行するアンチアフィニティーの preferred (優先) ルールを使用する Pod を作成する 2 つの Pod の単純な設定を示しています。
アフィニティーをスケジュールされた Pod に直接追加することはできません。
手順
Pod 仕様の特定のラベルの付いた Pod を作成します。
以下の内容を含む YAML ファイルを作成します。
apiVersion: v1 kind: Pod metadata: name: security-s1 labels: security: S1 spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: security-s1 image: docker.io/ocpqe/hello-pod securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL]Pod を作成します。
$ oc create -f <pod-spec>.yaml
他の Pod の作成時に、以下のパラメーターを設定します。
以下の内容を含む YAML ファイルを作成します。
apiVersion: v1 kind: Pod metadata: name: security-s2-east # ... spec: # ... affinity:1 podAntiAffinity: preferredDuringSchedulingIgnoredDuringExecution:2 - weight: 1003 podAffinityTerm: labelSelector: matchExpressions: - key: security4 values: - S1 operator: In5 topologyKey: kubernetes.io/hostname6 # ...- 1
- Pod のアンチアフィニティーを追加します。
- 2
requiredDuringSchedulingIgnoredDuringExecutionパラメーターまたはpreferredDuringSchedulingIgnoredDuringExecutionパラメーターを設定します。- 3
- preferred (優先) ルールの場合、ノードの重みを 1 - 100 で指定します。最も高い重みを持つノードが優先されます。
- 4
- 満たす必要のある
keyおよびvaluesを指定します。新規 Pod を他の Pod と共にスケジュールされないようにする必要がある場合、最初の Pod のラベルと同じkeyおよびvaluesパラメーターを使用します。 - 5
operatorを指定します。演算子はIn、NotIn、Exists、またはDoesNotExistにすることができます。たとえば、演算子Inを使用してラベルをノードで必要になるようにします。- 6
topologyKeyを指定します。これは、システムがトポロジードメインを表すために使用する事前にデータが設定された Kubernetes ラベル です。
Pod を作成します。
$ oc create -f <pod-spec>.yaml
4.2.4. Pod のアフィニティールールとアンチアフィニティールールの例
以下の例は、Pod のアフィニティーおよびアンチアフィニティーを示しています。
4.2.4.1. Pod のアフィニティー
以下の例は、一致するラベルとラベルセレクターを持つ Pod に関する Pod のアフィニティーを示しています。
Pod team4 にはラベル
team:4が付けられています。apiVersion: v1 kind: Pod metadata: name: team4 labels: team: "4" # ... spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: ocp image: docker.io/ocpqe/hello-pod securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] # ...Pod team4a には、
podAffinityの下にラベルセレクターteam:4が付けられています。apiVersion: v1 kind: Pod metadata: name: team4a # ... spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault affinity: podAffinity: requiredDuringSchedulingIgnoredDuringExecution: - labelSelector: matchExpressions: - key: team operator: In values: - "4" topologyKey: kubernetes.io/hostname containers: - name: pod-affinity image: docker.io/ocpqe/hello-pod securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] # ...- team4a Pod は team4 Pod と同じノードにスケジュールされます。
4.2.4.2. Pod のアンチアフィニティー
以下の例は、一致するラベルとラベルセレクターを持つ Pod に関する Pod のアンチアフィニティーを示しています。
Pod pod-s1 にはラベル
security:s1が付けられています。apiVersion: v1 kind: Pod metadata: name: pod-s1 labels: security: s1 # ... spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: ocp image: docker.io/ocpqe/hello-pod securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] # ...Pod pod-s2 には、
podAntiAffinityの下にラベルセレクターsecurity:s1が付けられています。apiVersion: v1 kind: Pod metadata: name: pod-s2 # ... spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault affinity: podAntiAffinity: requiredDuringSchedulingIgnoredDuringExecution: - labelSelector: matchExpressions: - key: security operator: In values: - s1 topologyKey: kubernetes.io/hostname containers: - name: pod-antiaffinity image: docker.io/ocpqe/hello-pod securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] # ...-
Pod pod-s2 は
pod-s1と同じノードにスケジュールできません。
4.2.4.3. 一致するラベルのない Pod のアフィニティー
以下の例は、一致するラベルとラベルセレクターのない Pod に関する Pod のアフィニティーを示しています。
Pod pod-s1 にはラベル
security:s1が付けられています。apiVersion: v1 kind: Pod metadata: name: pod-s1 labels: security: s1 # ... spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: ocp image: docker.io/ocpqe/hello-pod securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] # ...Pod pod-s2 にはラベルセレクター
security:s2があります。apiVersion: v1 kind: Pod metadata: name: pod-s2 # ... spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault affinity: podAffinity: requiredDuringSchedulingIgnoredDuringExecution: - labelSelector: matchExpressions: - key: security operator: In values: - s2 topologyKey: kubernetes.io/hostname containers: - name: pod-affinity image: docker.io/ocpqe/hello-pod securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] # ...Pod pod-s2 は、
security:s2ラベルの付いた Pod を持つノードがない場合はスケジュールされません。そのラベルの付いた他の Pod がない場合、新規 Pod は保留状態のままになります。出力例
NAME READY STATUS RESTARTS AGE IP NODE pod-s2 0/1 Pending 0 32s <none>
4.3. ノードのアフィニティールールを使用してノードへの Pod の配置を制御する
アフィニティーとは、スケジュールするノードを制御する Pod の特性です。
Red Hat OpenShift Service on AWS では、ノードのアフィニティーとはスケジューラーが Pod を配置する場所を決定するために使用する一連のルールのことです。このルールは、ノードのカスタムラベルと Pod で指定されたラベルセレクターを使用して定義されます。
4.3.1. ノードのアフィニティーについて
ノードのアフィニティーにより、Pod がその配置に使用できるノードのグループに対してアフィニティーを指定できます。ノード自体は配置に対して制御を行いません。
たとえば、Pod を特定の CPU を搭載したノードまたは特定のアベイラビリティーゾーンにあるノードでのみ実行されるよう設定することができます。
ノードのアフィニティールールには、required (必須) および preferred (優先) の 2 つのタイプがあります。
Pod をノードにスケジュールする前に、required (必須) ルールを 満たしている必要があります。preferred (優先) ルールは、ルールを満たす場合に、スケジューラーはルールの実施を試行しますが、その実施が必ずしも保証される訳ではありません。
ランタイム時にノードのラベルに変更が生じ、その変更により Pod でのノードのアフィニティールールを満たさなくなる状態が生じるでも、Pod はノードで引き続き実行されます。
ノードのアフィニティーは Pod 仕様ファイルで設定します。required (必須) ルール、preferred (優先) ルールのいずれか、その両方を指定することができます。両方を指定する場合、ノードは最初に required (必須) ルールを満たす必要があり、その後に preferred (優先) ルールを満たそうとします。
以下の例は、Pod をキーが e2e-az-NorthSouth で、その値が e2e-az-North または e2e-az-South のいずれかであるラベルの付いたノードに Pod を配置することを求めるルールが設定された Pod 仕様です。
ノードのアフィニティーの required (必須) ルールが設定された Pod 設定ファイルのサンプル
apiVersion: v1
kind: Pod
metadata:
name: with-node-affinity
spec:
securityContext:
runAsNonRoot: true
seccompProfile:
type: RuntimeDefault
affinity:
nodeAffinity:
requiredDuringSchedulingIgnoredDuringExecution:
nodeSelectorTerms:
- matchExpressions:
- key: e2e-az-NorthSouth
operator: In
values:
- e2e-az-North
- e2e-az-South
containers:
- name: with-node-affinity
image: docker.io/ocpqe/hello-pod
securityContext:
allowPrivilegeEscalation: false
capabilities:
drop: [ALL]
# ...
以下の例は、キーが e2e-az-EastWest で、その値が e2e-az-East または e2e-az-West のラベルが付いたノードに Pod を配置すること優先する preferred (優先) ルールが設定されたノード仕様です。
ノードのアフィニティーの preferred (優先) ルールが設定された Pod 設定ファイルのサンプル
apiVersion: v1
kind: Pod
metadata:
name: with-node-affinity
spec:
securityContext:
runAsNonRoot: true
seccompProfile:
type: RuntimeDefault
affinity:
nodeAffinity:
preferredDuringSchedulingIgnoredDuringExecution:
- weight: 1
preference:
matchExpressions:
- key: e2e-az-EastWest
operator: In
values:
- e2e-az-East
- e2e-az-West
containers:
- name: with-node-affinity
image: docker.io/ocpqe/hello-pod
securityContext:
allowPrivilegeEscalation: false
capabilities:
drop: [ALL]
# ...
ノードのアンチアフィニティー に関する明示的な概念はありませんが、NotIn または DoesNotExist 演算子を使用すると、動作が複製されます。
同じ Pod 設定でノードのアフィニティーとノードのセレクターを使用している場合は、以下に注意してください。
-
nodeSelectorとnodeAffinityの両方を設定する場合、Pod が候補ノードでスケジュールされるにはどちらの条件も満たしている必要があります。 -
nodeAffinityタイプに関連付けられた複数のnodeSelectorTermsを指定する場合、nodeSelectorTermsのいずれかが満たされている場合に Pod をノードにスケジュールすることができます。 -
nodeSelectorTermsに関連付けられた複数のmatchExpressionsを指定する場合、すべてのmatchExpressionsが満たされている場合にのみ Pod をノードにスケジュールすることができます。
4.3.2. ノードアフィニティーの required (必須) ルールの設定
Pod をノードにスケジュールする前に、required (必須) ルールを 満たしている必要があります。
手順
以下の手順は、ノードとスケジューラーがノードに配置する必要のある Pod を作成する単純な設定を示しています。
Pod 仕様の特定のラベルの付いた Pod を作成します。
以下の内容を含む YAML ファイルを作成します。
注記アフィニティーをスケジュールされた Pod に直接追加することはできません。
出力例
apiVersion: v1 kind: Pod metadata: name: s1 spec: affinity:1 nodeAffinity: requiredDuringSchedulingIgnoredDuringExecution:2 nodeSelectorTerms: - matchExpressions: - key: e2e-az-name3 values: - e2e-az1 - e2e-az2 operator: In4 #...Pod を作成します。
$ oc create -f <file-name>.yaml
4.3.3. ノードアフィニティーの preferred (優先) ルールの設定
preferred (優先) ルールは、ルールを満たす場合に、スケジューラーはルールの実施を試行しますが、その実施が必ずしも保証される訳ではありません。
手順
以下の手順は、ノードとスケジューラーがノードに配置しようとする Pod を作成する単純な設定を示しています。
特定のラベルの付いた Pod を作成します。
以下の内容を含む YAML ファイルを作成します。
注記アフィニティーをスケジュールされた Pod に直接追加することはできません。
apiVersion: v1 kind: Pod metadata: name: s1 spec: affinity:1 nodeAffinity: preferredDuringSchedulingIgnoredDuringExecution:2 - weight:3 preference: matchExpressions: - key: e2e-az-name4 values: - e2e-az3 operator: In5 #...- 1
- Pod のアフィニティーを追加します。
- 2
preferredDuringSchedulingIgnoredDuringExecutionパラメーターを設定します。- 3
- ノードの重みを数字の 1-100 で指定します。最も高い重みを持つノードが優先されます。
- 4
- 満たす必要のある
keyおよびvaluesを指定します。新規 Pod を編集したノードにスケジュールする必要がある場合、ノードのラベルと同じkeyおよびvaluesパラメーターを使用します。 - 5
operatorを指定します。演算子はIn、NotIn、Exists、またはDoesNotExistにすることができます。たとえば、演算子Inを使用してラベルをノードで必要になるようにします。
Pod を作成します。
$ oc create -f <file-name>.yaml
4.3.4. ノードのアフィニティールールの例
以下の例は、ノードのアフィニティーを示しています。
4.3.4.1. 一致するラベルを持つノードのアフィニティー
以下の例は、一致するラベルを持つノードと Pod のノードのアフィニティーを示しています。
Node1 ノードにはラベル
zone:usがあります。$ oc label node node1 zone=usヒントあるいは、以下の YAML を適用してラベルを追加できます。
kind: Node apiVersion: v1 metadata: name: <node_name> labels: zone: us #...pod-s1 pod にはノードアフィニティーの required (必須) ルールの下に
zoneとusのキー/値のペアがあります。$ cat pod-s1.yaml出力例
apiVersion: v1 kind: Pod metadata: name: pod-s1 spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - image: "docker.io/ocpqe/hello-pod" name: hello-pod securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] affinity: nodeAffinity: requiredDuringSchedulingIgnoredDuringExecution: nodeSelectorTerms: - matchExpressions: - key: "zone" operator: In values: - us #...pod-s1 pod は Node1 でスケジュールできます。
$ oc get pod -o wide出力例
NAME READY STATUS RESTARTS AGE IP NODE pod-s1 1/1 Running 0 4m IP1 node1
4.3.4.2. 一致するラベルのないノードのアフィニティー
以下の例は、一致するラベルを持たないノードと Pod のノードのアフィニティーを示しています。
Node1 ノードにはラベル
zone:emeaがあります。$ oc label node node1 zone=emeaヒントあるいは、以下の YAML を適用してラベルを追加できます。
kind: Node apiVersion: v1 metadata: name: <node_name> labels: zone: emea #...pod-s1 pod にはノードアフィニティーの required (必須) ルールの下に
zoneとusのキー/値のペアがあります。$ cat pod-s1.yaml出力例
apiVersion: v1 kind: Pod metadata: name: pod-s1 spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - image: "docker.io/ocpqe/hello-pod" name: hello-pod securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] affinity: nodeAffinity: requiredDuringSchedulingIgnoredDuringExecution: nodeSelectorTerms: - matchExpressions: - key: "zone" operator: In values: - us #...pod-s1 pod は Node1 でスケジュールすることができません。
$ oc describe pod pod-s1出力例
... Events: FirstSeen LastSeen Count From SubObjectPath Type Reason --------- -------- ----- ---- ------------- -------- ------ 1m 33s 8 default-scheduler Warning FailedScheduling No nodes are available that match all of the following predicates:: MatchNodeSelector (1).
4.4. Pod のオーバーコミットノードへの配置
オーバーコミット とは、コンテナーの計算リソース要求と制限の合計が、そのシステムで利用できるリソースを超えた状態のことです。オーバーコミットは、容量に対して保証されたパフォーマンスのトレードオフが許容可能である開発環境において、望ましいことがあります。
要求および制限により、管理者はノードでのリソースのオーバーコミットを許可し、管理できます。スケジューラーは、要求を使用してコンテナーをスケジュールし、最小限のサービス保証を提供します。制限は、ノード上で消費されるコンピュートリソースの量を制限します。
4.4.1. オーバーコミットについて
要求および制限により、管理者はノードでのリソースのオーバーコミットを許可し、管理できます。スケジューラーは、要求を使用してコンテナーをスケジュールし、最小限のサービス保証を提供します。制限は、ノード上で消費されるコンピュートリソースの量を制限します。
Red Hat OpenShift Service on AWS の管理者は、開発者用のコンテナーに設定された要求と制限の比率をオーバーライドするようにマスターを設定することで、オーバーコミットのレベルを制御し、ノード上のコンテナー密度を管理できます。この設定を、制限とデフォルトを指定するプロジェクトごとの LimitRange と共に使用することで、オーバーコミットを必要なレベルに設定できるようコンテナーの制限と要求を調整することができます。
コンテナーに制限が設定されていない場合、これらのオーバーライドは効果がありません。デフォルトの制限で (個別プロジェクトごとに、またはプロジェクトテンプレートを使用して) LimitRange オブジェクトを作成し、オーバーライドが適用されるようにします。
オーバーライド後も、コンテナーの制限および要求は、プロジェクトのいずれかの LimitRange オブジェクトで引き続き検証される必要があります。たとえば、開発者が最小限度に近い制限を指定し、要求を最小限度よりも低い値にオーバーライドすることで、Pod が禁止される可能性があります。この最適でないユーザーエクスペリエンスは、今後の作業で対応する必要がありますが、現時点ではこの機能および LimitRange オブジェクトを注意して設定してください。
4.4.2. ノードのオーバーコミットについて
オーバーコミット環境では、最適なシステム動作を提供できるようにノードを適切に設定する必要があります。
ノードが起動すると、メモリー管理用のカーネルの調整可能なフラグが適切に設定されます。カーネルは、物理メモリーが不足しない限り、メモリーの割り当てに失敗することはありません。
この動作を確実にするために、Red Hat OpenShift Service on AWS は、vm.overcommit_memory パラメーターを 1 に設定し、デフォルトのオペレーティングシステム設定をオーバーライドすることで、常にメモリーをオーバーコミットするようにカーネルを設定します。
また、Red Hat OpenShift Service on AWS は、vm.panic_on_oom パラメーターを 0 に設定することで、メモリー不足時のカーネルパニックを回避します。0 を設定すると、Out of Memory (OOM) 状態のときに oom_killer を呼び出すようカーネルに指示します。これにより、優先順位に基づいてプロセスを強制終了します。
現在の設定は、ノードに以下のコマンドを実行して表示できます。
$ sysctl -a |grep commit出力例
#...
vm.overcommit_memory = 0
#...$ sysctl -a |grep panic出力例
#...
vm.panic_on_oom = 0
#...上記のフラグはノード上にすでに設定されているはずであるため、追加のアクションは不要です。
各ノードに対して以下の設定を実行することもできます。
- CPU CFS クォータを使用した CPU 制限の無効化または実行
- システムプロセスのリソース予約
- Quality of Service (QoS) 層でのメモリー予約
4.5. ノードセレクターの使用による特定ノードへの Pod の配置
ノードセレクター は、ノードのカスタムラベルと Pod で指定されるセレクターを使用して定義されるキー/値のペアのマップを指定します。
Pod がノードで実行する要件を満たすには、Pod にはノードのラベルと同じキー/値のペアがなければなりません。
4.5.1. ノードセレクターについて
Pod でノードセレクターを使用し、ノードでラベルを使用して、Pod がスケジュールされる場所を制御できます。ノードセレクターを使用すると、Red Hat OpenShift Service on AWS は一致するラベルが含まれるノード上に Pod をスケジュールします。
ノードセレクターを使用して特定の Pod を特定のノードに配置し、クラスタースコープのノードセレクターを使用して特定ノードの新規 Pod をクラスター内の任意の場所に配置し、プロジェクトノードを使用して新規 Pod を特定ノードのプロジェクトに配置できます。
たとえば、クラスター管理者は、作成するすべての Pod にノードセレクターを追加して、アプリケーション開発者が地理的に最も近い場所にあるノードにのみ Pod をデプロイできるインフラストラクチャーを作成できます。この例では、クラスターは 2 つのリージョンに分散する 5 つのデータセンターで構成されます。米国では、ノードに us-east、us-central、または us-west のラベルを付けます。アジア太平洋リージョン (APAC) では、ノードに apac-east または apac-west のラベルを付けます。開発者は、Pod がこれらのノードにスケジュールされるように、作成する Pod にノードセレクターを追加できます。
Pod オブジェクトにノードセレクターが含まれる場合でも、一致するラベルを持つノードがない場合、Pod はスケジュールされません。
同じ Pod 設定でノードセレクターとノードのアフィニティーを使用している場合は、以下のルールが Pod のノードへの配置を制御します。
-
nodeSelectorとnodeAffinityの両方を設定する場合、Pod が候補ノードでスケジュールされるにはどちらの条件も満たしている必要があります。 -
nodeAffinityタイプに関連付けられた複数のnodeSelectorTermsを指定する場合、nodeSelectorTermsのいずれかが満たされている場合に Pod をノードにスケジュールすることができます。 -
nodeSelectorTermsに関連付けられた複数のmatchExpressionsを指定する場合、すべてのmatchExpressionsが満たされている場合にのみ Pod をノードにスケジュールすることができます。
- 特定の Pod およびノードのノードセレクター
ノードセレクターおよびラベルを使用して、特定の Pod がスケジュールされるノードを制御できます。
ノードセレクターおよびラベルを使用するには、まずノードにラベルを付けて Pod がスケジュール解除されないようにしてから、ノードセレクターを Pod に追加します。
注記ノードセレクターを既存のスケジュールされている Pod に直接追加することはできません。デプロイメント設定などの Pod を制御するオブジェクトにラベルを付ける必要があります。
たとえば、以下の
Nodeオブジェクトにはregion: eastラベルがあります。ラベルを含む
Nodeオブジェクトのサンプルkind: Node apiVersion: v1 metadata: name: ip-10-0-131-14.ec2.internal selfLink: /api/v1/nodes/ip-10-0-131-14.ec2.internal uid: 7bc2580a-8b8e-11e9-8e01-021ab4174c74 resourceVersion: '478704' creationTimestamp: '2019-06-10T14:46:08Z' labels: kubernetes.io/os: linux topology.kubernetes.io/zone: us-east-1a node.openshift.io/os_version: '4.5' node-role.kubernetes.io/worker: '' topology.kubernetes.io/region: us-east-1 node.openshift.io/os_id: rhcos node.kubernetes.io/instance-type: m4.large kubernetes.io/hostname: ip-10-0-131-14 kubernetes.io/arch: amd64 region: east1 type: user-node #...- 1
- Pod ノードセレクターに一致するラベル。
Pod には
type: user-node,region: eastノードセレクターがあります。ノードセレクターが含まれる
PodオブジェクトのサンプルapiVersion: v1 kind: Pod metadata: name: s1 #... spec: nodeSelector:1 region: east type: user-node #...- 1
- ノードトラベルに一致するノードセレクター。ノードには、各ノードセレクターのラベルが必要です。
サンプル Pod 仕様を使用して Pod を作成する場合、これはサンプルノードでスケジュールできます。
- クラスタースコープのデフォルトノードセレクター
デフォルトのクラスタースコープのノードセレクターを使用する場合、クラスターで Pod を作成すると、Red Hat OpenShift Service on AWS はデフォルトのノードセレクターを Pod に追加し、一致するラベルのあるノードで Pod をスケジュールします。
たとえば、以下の
Schedulerオブジェクトにはデフォルトのクラスタースコープのregion=eastおよびtype=user-nodeノードセレクターがあります。スケジューラー Operator カスタムリソースの例
apiVersion: config.openshift.io/v1 kind: Scheduler metadata: name: cluster #... spec: defaultNodeSelector: type=user-node,region=east #...クラスター内のノードには
type=user-node,region=eastラベルがあります。Nodeオブジェクトの例apiVersion: v1 kind: Node metadata: name: ci-ln-qg1il3k-f76d1-hlmhl-worker-b-df2s4 #... labels: region: east type: user-node #...ノードセレクターを持つ
Podオブジェクトの例apiVersion: v1 kind: Pod metadata: name: s1 #... spec: nodeSelector: region: east #...サンプルクラスターでサンプル Pod 仕様を使用して Pod を作成する場合、Pod はクラスタースコープのノードセレクターで作成され、ラベルが付けられたノードにスケジュールされます。
ラベルが付けられたノード上の Pod を含む Pod リストの例
NAME READY STATUS RESTARTS AGE IP NODE NOMINATED NODE READINESS GATES pod-s1 1/1 Running 0 20s 10.131.2.6 ci-ln-qg1il3k-f76d1-hlmhl-worker-b-df2s4 <none> <none>注記Pod を作成するプロジェクトにプロジェクトノードセレクターがある場合、そのセレクターはクラスタースコープのセレクターよりも優先されます。Pod にプロジェクトノードセレクターがない場合、Pod は作成されたり、スケジュールされたりしません。
- プロジェクトノードセレクター
プロジェクトノードセレクターを使用する場合、このプロジェクトで Pod を作成すると、Red Hat OpenShift Service on AWS はノードセレクターを Pod に追加し、一致するラベルを持つノードで Pod をスケジュールします。クラスタースコープのデフォルトノードセレクターがない場合、プロジェクトノードセレクターが優先されます。
たとえば、以下のプロジェクトには
region=eastノードセレクターがあります。Namespaceオブジェクトの例apiVersion: v1 kind: Namespace metadata: name: east-region annotations: openshift.io/node-selector: "region=east" #...以下のノードには
type=user-node,region=eastラベルがあります。Nodeオブジェクトの例apiVersion: v1 kind: Node metadata: name: ci-ln-qg1il3k-f76d1-hlmhl-worker-b-df2s4 #... labels: region: east type: user-node #...Pod をこのサンプルプロジェクトでサンプル Pod 仕様を使用して作成する場合、Pod はプロジェクトノードセレクターで作成され、ラベルが付けられたノードにスケジュールされます。
Podオブジェクトの例apiVersion: v1 kind: Pod metadata: namespace: east-region #... spec: nodeSelector: region: east type: user-node #...ラベルが付けられたノード上の Pod を含む Pod リストの例
NAME READY STATUS RESTARTS AGE IP NODE NOMINATED NODE READINESS GATES pod-s1 1/1 Running 0 20s 10.131.2.6 ci-ln-qg1il3k-f76d1-hlmhl-worker-b-df2s4 <none> <none>Pod に異なるノードセレクターが含まれる場合、プロジェクトの Pod は作成またはスケジュールされません。たとえば、以下の Pod をサンプルプロジェクトにデプロイする場合、これは作成されません。
無効なノードセレクターを持つ
Podオブジェクトの例apiVersion: v1 kind: Pod metadata: name: west-region #... spec: nodeSelector: region: west #...
4.5.2. ノードセレクターの使用による Pod 配置の制御
Pod でノードセレクターを使用し、ノードでラベルを使用して、Pod がスケジュールされる場所を制御できます。ノードセレクターを使用すると、Red Hat OpenShift Service on AWS は一致するラベルが含まれるノード上に Pod をスケジュールします。
ラベルをノード、コンピュートマシンセット、またはマシン設定に追加します。コンピュートマシンセットにラベルを追加すると、ノードまたはマシンが停止した場合に、新規ノードにそのラベルが追加されます。ノードまたはマシン設定に追加されるラベルは、ノードまたはマシンが停止すると維持されません。
ノードセレクターを既存 Pod に追加するには、ノードセレクターを ReplicaSet オブジェクト、DaemonSet オブジェクト、StatefulSet オブジェクト、Deployment オブジェクト、または DeploymentConfig オブジェクトなどの Pod の制御オブジェクトに追加します。制御オブジェクト下の既存 Pod は、一致するラベルを持つノードで再作成されます。新規 Pod を作成する場合、ノードセレクターを Pod 仕様に直接追加できます。Pod に制御オブジェクトがない場合は、Pod を削除し、Pod 仕様を編集して、Pod を再作成する必要があります。
ノードセレクターを既存のスケジュールされている Pod に直接追加することはできません。
前提条件
ノードセレクターを既存 Pod に追加するには、Pod の制御オブジェクトを判別します。たとえば、router-default-66d5cf9464-m2g75 Pod は router-default-66d5cf9464 レプリカセットによって制御されます。
$ oc describe pod router-default-66d5cf9464-7pwkc出力例
kind: Pod
apiVersion: v1
metadata:
# ...
Name: router-default-66d5cf9464-7pwkc
Namespace: openshift-ingress
# ...
Controlled By: ReplicaSet/router-default-66d5cf9464
# ...
Web コンソールでは、Pod YAML の ownerReferences に制御オブジェクトをリスト表示します。
apiVersion: v1
kind: Pod
metadata:
name: router-default-66d5cf9464-7pwkc
# ...
ownerReferences:
- apiVersion: apps/v1
kind: ReplicaSet
name: router-default-66d5cf9464
uid: d81dd094-da26-11e9-a48a-128e7edf0312
controller: true
blockOwnerDeletion: true
# ...手順
一致するノードセレクターを Pod に追加します。
ノードセレクターを既存 Pod および新規 Pod に追加するには、ノードセレクターを Pod の制御オブジェクトに追加します。
ラベルを含む
ReplicaSetオブジェクトのサンプルkind: ReplicaSet apiVersion: apps/v1 metadata: name: hello-node-6fbccf8d9 # ... spec: # ... template: metadata: creationTimestamp: null labels: ingresscontroller.operator.openshift.io/deployment-ingresscontroller: default pod-template-hash: 66d5cf9464 spec: nodeSelector: kubernetes.io/os: linux node-role.kubernetes.io/worker: '' type: user-node1 # ...- 1
- ノードセレクターを追加します。
ノードセレクターを特定の新規 Pod に追加するには、セレクターを
Podオブジェクトに直接追加します。ノードセレクターを持つ
Podオブジェクトの例apiVersion: v1 kind: Pod metadata: name: hello-node-6fbccf8d9 # ... spec: nodeSelector: region: east type: user-node # ...注記ノードセレクターを既存のスケジュールされている Pod に直接追加することはできません。
4.6. Pod トポロジー分散制約を使用した Pod 配置の制御
Pod トポロジーの分散制約を使用すると、ノード、ゾーン、リージョン、またはその他のユーザー定義のトポロジードメイン全体にわたる Pod の配置を詳細に制御できます。障害ドメイン全体に Pod を分散すると、高可用性とより効率的なリソース利用を実現できます。
4.6.1. 使用例
- 管理者として、ワークロードを 2 個から 15 個の Pod 間で自動的にスケーリングしたいと考えています。Pod が 2 つしかない場合は、単一障害点を回避するために、Pod が同じノードに配置されないようにする必要があります。
- 管理者として、レイテンシーとネットワークコストを削減するために、Pod を複数のインフラストラクチャーゾーンに均等に分散し、問題が発生した場合にクラスターが自己修復できることを確認したいと考えています。
4.6.2. 重要な留意事項
- Red Hat OpenShift Service on AWS クラスター内の Pod は、デプロイメント、ステートフルセット、デーモンセットなどの ワークロードコントローラー によって管理されます。これらのコントローラーは、クラスター内のノード間で Pod がどのように分散およびスケーリングされるかなど、Pod のグループの望ましい状態を定義します。混乱を避けるために、グループ内のすべての Pod に同じ Pod トポロジーの分散制約を設定する必要があります。デプロイメントなどのワークロードコントローラーを使用する場合、通常は Pod テンプレートがこれを処理します。
-
異なる Pod トポロジーの分散制約を混在させると、Red Hat OpenShift Service on AWS の動作が混同され、トラブルシューティングが困難になる可能性があります。トポロジードメイン内のすべてのノードに一貫したラベルが付けられていることを確認することで、これを回避できます。Red Hat OpenShift Service on AWS は、
kubernetes.io/hostnameなどのよく知られたラベルを自動的に入力します。これにより、ノードに手動でラベルを付ける必要がなくなります。これらのラベルは重要なトポロジー情報を提供し、クラスター全体で一貫したノードラベル付けを保証します。 - 制約により、分散される際に同じ namespace 内の Pod のみが一致し、グループ化されます。
- 複数の Pod トポロジー分散制約を指定できますが、それらが互いに競合しないようにする必要があります。Pod を配置するには、すべての Pod トポロジー分散制約を満たしている必要があります。
4.6.3. skew と maxSkew
スキューとは、ゾーンやノードなどの異なるトポロジードメイン間で指定されたラベルセレクターに一致する Pod の数の差を指します。
スキューは、各ドメイン内の Pod の数と、スケジュールされている Pod の数が最も少ないドメイン内の Pod 数との絶対差をとることで、各ドメインごとに計算されます。maxSkew 値を設定すると、スケジューラーはバランスの取れた Pod 分散を維持するようになります。
4.6.3.1. スキューの計算例
3 つのゾーン (A、B、C) があり、これらのゾーンに Pod を均等に分散したいと考えています。ゾーン A に Pod が 5 個、ゾーン B に Pod が 3 個、ゾーン C に Pod が 2 個ある場合、偏りを見つけるには、各ゾーンに現在ある Pod の数から、スケジュールされている Pod の数が最も少ないドメインの Pod の数を減算します。つまり、ゾーン A のスキューは 3、ゾーン B のスキューは 1、ゾーン C のスキューは 0 です。
4.6.3.2. maxSkew パラメーター
maxSkew パラメーターは、任意の 2 つのトポロジードメイン間の Pod 数の最大許容差、つまりスキューを定義します。maxSkew が 1 に設定されている場合、トポロジードメイン内の Pod の数は、他のドメインとの差が 1 を超えてはなりません。スキューが maxSkew を超える場合、スケジューラーは制約に従ってスキューを減らす方法で新しい Pod を配置しようとします。
前のスキュー計算例を使用すると、スキュー値はデフォルトの maxSkew 値 1 を超えます。スケジューラーは、スキューを減らして、負荷がバランスよく分散されるように、ゾーン B とゾーン C に新しい Pod を配置し、トポロジードメインがスキュー 1 を超えないようにします。
4.6.4. Pod トポロジー分散制約の設定例
グループ化する Pod を指定し、それらの Pod が分散されるトポロジードメインと、許可できるスキューを指定します。
以下の例は、Pod トポロジー設定分散制約の設定を示しています。
指定されたラベルに一致する Pod をゾーンに基づいて分散する例
apiVersion: v1
kind: Pod
metadata:
name: my-pod
labels:
region: us-east
spec:
securityContext:
runAsNonRoot: true
seccompProfile:
type: RuntimeDefault
topologySpreadConstraints:
- maxSkew: 1
topologyKey: topology.kubernetes.io/zone
whenUnsatisfiable: DoNotSchedule
labelSelector:
matchLabels:
region: us-east
matchLabelKeys:
- my-pod-label
containers:
- image: "docker.io/ocpqe/hello-pod"
name: hello-pod
securityContext:
allowPrivilegeEscalation: false
capabilities:
drop: [ALL]- 1
- 任意の 2 つのトポロジードメイン間の Pod 数の最大差。デフォルトは
1で、0の値を指定することはできません。 - 2
- ノードラベルのキー。このキーと同じ値を持つノードは同じトポロジーにあると見なされます。
- 3
- 分散制約を満たさない場合に Pod を処理する方法です。デフォルトは
DoNotScheduleであり、これはスケジューラーに Pod をスケジュールしないように指示します。ScheduleAnywayに設定して Pod を依然としてスケジュールできますが、スケジューラーはクラスターがさらに不均衡な状態になるのを防ぐためにスキューの適用を優先します。 - 4
- 制約を満たすために、分散される際に、このラベルセレクターに一致する Pod はグループとしてカウントされ、認識されます。ラベルセレクターを指定してください。指定しないと、Pod が一致しません。
- 5
- 今後適切にカウントされるようにするには、この
Pod仕様がこのラベルセレクターに一致するようにラベルを設定していることも確認してください。 - 6
- 拡散を計算する Pod を選択するための Pod ラベルキーのリスト。
単一 Pod トポロジーの分散制約を示す例
kind: Pod
apiVersion: v1
metadata:
name: my-pod
labels:
region: us-east
spec:
securityContext:
runAsNonRoot: true
seccompProfile:
type: RuntimeDefault
topologySpreadConstraints:
- maxSkew: 1
topologyKey: topology.kubernetes.io/zone
whenUnsatisfiable: DoNotSchedule
labelSelector:
matchLabels:
region: us-east
containers:
- image: "docker.io/ocpqe/hello-pod"
name: hello-pod
securityContext:
allowPrivilegeEscalation: false
capabilities:
drop: [ALL]
前の例では、Pod トポロジーの分散制約が 1 つある Pod 仕様を定義しています。これは region: us-east というラベルが付いた Pod で一致し、ゾーン間で分散され、スキューの 1 を指定し、これらの要件を満たさない場合に Pod をスケジュールしません。
複数の Pod トポロジー分散制約を示す例
kind: Pod
apiVersion: v1
metadata:
name: my-pod-2
labels:
region: us-east
spec:
securityContext:
runAsNonRoot: true
seccompProfile:
type: RuntimeDefault
topologySpreadConstraints:
- maxSkew: 1
topologyKey: node
whenUnsatisfiable: DoNotSchedule
labelSelector:
matchLabels:
region: us-east
- maxSkew: 1
topologyKey: rack
whenUnsatisfiable: DoNotSchedule
labelSelector:
matchLabels:
region: us-east
containers:
- image: "docker.io/ocpqe/hello-pod"
name: hello-pod
securityContext:
allowPrivilegeEscalation: false
capabilities:
drop: [ALL]
上記の例では、Pod トポロジー分散制約が 2 つある Pod 仕様を定義します。どちらも region: us-east というラベルの付いた Pod に一致し、スキューを 1 に指定し、これらの要件を満たしていない場合は Pod はスケジュールされません。
最初の制約は、ユーザー定義ラベルの node に基づいて Pod を分散し、2 つ目の制約はユーザー定義ラベルの rack に基づいて Pod を分散します。Pod がスケジュールされるには、両方の制約を満たす必要があります。
第5章 ジョブとデーモンセットの使用
5.1. デーモンセットによるノード上でのバックグラウンドタスクの自動的な実行
管理者は、デーモンセットを作成して使用し、Red Hat OpenShift Service on AWS クラスター内の特定のノードまたはすべてのノードで Pod のレプリカを実行できます。
デーモンセットは、すべて (または一部) のノードで Pod のコピーが確実に実行されるようにします。ノードがクラスターに追加されると、Pod がクラスターに追加されます。ノードがクラスターから削除されると、Pod はガベージコレクションによって削除されます。デーモンセットを削除すると、デーモンセットによって作成された Pod がクリーンアップされます。
デーモンセットを使用して共有ストレージを作成し、クラスター内のすべてのノードでロギング Pod を実行するか、すべてのノードでモニターエージェントをデプロイできます。
セキュリティー上の理由から、クラスター管理者とプロジェクト管理者がデーモンセットを作成できます。
デーモンセットの詳細は、Kubernetes ドキュメント を参照してください。
デーモンセットのスケジューリングにはプロジェクトのデフォルトノードセレクターとの互換性がありません。これを無効にしない場合、デーモンセットはデフォルトのノードセレクターとのマージによって制限されます。これにより、マージされたノードセレクターで選択解除されたノードで Pod が頻繁に再作成されるようになり、クラスターに不要な負荷が加わります。
5.1.1. デフォルトスケジューラーによるスケジュール
デーモンセットは、適格なすべてのノードで Pod のコピーが確実に実行されるようにします。通常は、Pod が実行されるノードは Kubernetes のスケジューラーが選択します。ただし、デーモンセット Pod はデーモンセットコントローラーによって作成され、スケジュールされます。その結果、以下のような問題が生じています。
-
Pod の動作に一貫性がない。スケジューリングを待機している通常の Pod は、作成されると Pending 状態になりますが、デーモンセット Pod は作成されても
Pending状態になりません。これによりユーザーに混乱が生じます。 - Pod のプリエンプションがデフォルトのスケジューラーで処理される。プリエンプションが有効にされると、デーモンセットコントローラーは Pod の優先順位とプリエンプションを考慮することなくスケジューリングの決定を行います。
ScheduleDaemonSetPods 機能は、Red Hat OpenShift Service on AWS でデフォルトで有効にされます。これにより、spec.nodeName の条件 (term) ではなく NodeAffinity の条件 (term) をデーモンセット Pod に追加することで、デーモンセットコントローラーではなくデフォルトのスケジューラーを使ってデーモンセットをスケジュールすることができます。その後、デフォルトのスケジューラーは、Pod をターゲットホストにバインドさせるために使用されます。デーモンセット Pod のノードアフィニティーがすでに存在する場合、これは置き換えられます。デーモンセットコントローラーは、デーモンセット Pod を作成または変更する場合にのみこれらの操作を実行し、デーモンセットの spec.template は一切変更されません。
kind: Pod
apiVersion: v1
metadata:
name: hello-node-6fbccf8d9-9tmzr
#...
spec:
nodeAffinity:
requiredDuringSchedulingIgnoredDuringExecution:
nodeSelectorTerms:
- matchFields:
- key: metadata.name
operator: In
values:
- target-host-name
#...
さらに、node.kubernetes.io/unschedulable:NoSchedule の toleration がデーモンセット Pod に自動的に追加されます。デフォルトのスケジューラーは、デーモンセット Pod をスケジュールする際に、スケジュールできないノードを無視します。
5.1.2. デーモンセットの作成
デーモンセットの作成時に、nodeSelector フィールドは、デーモンセットがレプリカをデプロイする必要のあるノードを指定するために使用されます。
前提条件
デーモンセットの使用を開始する前に、namespace のアノテーション
openshift.io/node-selectorを空の文字列に設定することで、namespace のプロジェクトスコープのデフォルトのノードセレクターを無効にします。$ oc patch namespace myproject -p \ '{"metadata": {"annotations": {"openshift.io/node-selector": ""}}}'ヒントまたは、以下の YAML を適用して、プロジェクト全体で namespace のデフォルトのノードセレクターを無効にすることもできます。
apiVersion: v1 kind: Namespace metadata: name: <namespace> annotations: openshift.io/node-selector: '' #...
手順
デーモンセットを作成するには、以下を実行します。
デーモンセット yaml ファイルを定義します。
apiVersion: apps/v1 kind: DaemonSet metadata: name: hello-daemonset spec: selector: matchLabels: name: hello-daemonset1 template: metadata: labels: name: hello-daemonset2 spec: nodeSelector:3 role: worker containers: - image: openshift/hello-openshift imagePullPolicy: Always name: registry ports: - containerPort: 80 protocol: TCP resources: {} terminationMessagePath: /dev/termination-log serviceAccount: default terminationGracePeriodSeconds: 10 #...デーモンセットオブジェクトを作成します。
$ oc create -f daemonset.yamlPod が作成されていることを確認し、各 Pod に Pod レプリカがあることを確認するには、以下を実行します。
daemonset Pod を検索します。
$ oc get pods出力例
hello-daemonset-cx6md 1/1 Running 0 2m hello-daemonset-e3md9 1/1 Running 0 2mPod がノードに配置されていることを確認するために Pod を表示します。
$ oc describe pod/hello-daemonset-cx6md|grep Node出力例
Node: openshift-node01.hostname.com/10.14.20.134$ oc describe pod/hello-daemonset-e3md9|grep Node出力例
Node: openshift-node02.hostname.com/10.14.20.137
- デーモンセット Pod テンプレートを更新しても、既存の Pod レプリカには影響はありません。
- デーモンセットを削除してから、異なるテンプレートと同じラベルセレクターを使用して新規のデーモンセットを作成する場合に、既存の Pod レプリカでラベルが一致していると認識するため、既存の Pod レプリカは更新されず、Pod テンプレートで一致しない場合でも新しいレプリカが作成されます。
- ノードのラベルを変更する場合には、デーモンセットは新しいラベルと一致するノードに Pod を追加し、新しいラベルと一致しないノードから Pod を削除します。
デーモンセットを更新するには、古いレプリカまたはノードを削除して新規の Pod レプリカの作成を強制的に実行します。
5.2. ジョブを使用した Pod でのタスクの実行
ジョブ は、Red Hat OpenShift Service on AWS クラスターでタスクを実行します。
ジョブは、タスクの全体的な進捗状況を追跡し、進行中、完了、および失敗した各 Pod の情報を使用してその状態を更新します。ジョブを削除するとそのジョブによって作成された Pod のレプリカがクリーンアップされます。ジョブは Kubernetes API の一部で、他のオブジェクトタイプ同様に oc コマンドで管理できます。
ジョブ仕様のサンプル
apiVersion: batch/v1
kind: Job
metadata:
name: pi
spec:
parallelism: 1
completions: 1
activeDeadlineSeconds: 1800
backoffLimit: 6
template:
metadata:
name: pi
spec:
containers:
- name: pi
image: perl
command: ["perl", "-Mbignum=bpi", "-wle", "print bpi(2000)"]
restartPolicy: OnFailure
#...関連情報
- Kubernetes ドキュメントの ジョブ
5.2.1. ジョブと cron ジョブについて
ジョブは、タスクの全体的な進捗状況を追跡し、進行中、完了、および失敗した各 Pod の情報を使用してその状態を更新します。ジョブを削除するとそのジョブによって作成された Pod がクリーンアップされます。ジョブは Kubernetes API の一部で、他のオブジェクトタイプ同様に oc コマンドで管理できます。
Red Hat OpenShift Service on AWS で一度だけ実行するオブジェクトを作成できるリソースタイプは 2 種類あります。
- ジョブ
定期的なジョブは、タスクを作成しジョブが完了したことを確認する、一度だけ実行するオブジェクトです。
ジョブとして実行するには、主に以下のタスクタイプを使用できます。
非並列ジョブ:
- Pod が失敗しない限り、単一の Pod のみを起動するジョブ。
- このジョブは、Pod が正常に終了するとすぐに完了します。
固定の完了数が指定された並列ジョブ
- 複数の Pod を起動するジョブ。
-
ジョブはタスク全体を表し、
1からcompletions値までの範囲内のそれぞれの値に対して 1 つの正常な Pod がある場合に完了します。
ワークキューを含む並列ジョブ:
- 指定された Pod に複数の並列ワーカープロセスを持つジョブ。
- Red Hat OpenShift Service on AWS は、Pod を調整して各 Pod が何を処理するかを決定するか、外部キューサービスを使用します。
- 各 Pod はそれぞれ、すべてのピア Pod が完了しているかどうかや、ジョブ全体が実行済みであることを判別することができます。
- ジョブからの Pod が正常な状態で終了すると、新規 Pod は作成されません。
- 1 つ以上の Pod が正常な状態で終了し、すべての Pod が終了している場合、ジョブが正常に完了します。
Pod が正常な状態で終了した場合、それ以外の Pod がこのタスクに対して機能したり、または出力を書き込むことはありません。Pod はすべて終了プロセスにあるはずです。
各種のジョブを使用する方法の詳細は、Kubernetes ドキュメントの Job Patterns を参照してください。
- Cron ジョブ
ジョブは、cron ジョブを使用して複数回実行するようにスケジュールすることが可能です。
cron ジョブ は、ユーザーがジョブの実行方法を指定することを可能にすることで、定期的なジョブを積み重ねます。Cron ジョブは Kubernetes API の一部であり、他のオブジェクトタイプと同様に
ocコマンドで管理できます。Cron ジョブは、バックアップの実行やメールの送信など周期的な繰り返しのタスクを作成する際に役立ちます。また、低アクティビティー期間にジョブをスケジュールする場合など、特定の時間に個別のタスクをスケジュールすることも可能です。cron ジョブは、cronjob コントローラーを実行するコントロールプレーンノードに設定されたタイムゾーンに基づいて
Jobオブジェクトを作成します。警告cron ジョブはスケジュールの実行時間ごとに約 1 回ずつ
Jobオブジェクトを作成しますが、ジョブの作成に失敗したり、2 つのジョブが作成される場合があります。そのためジョブはべき等である必要があり、履歴制限を設定する必要があります。
5.2.1.1. ジョブの作成方法
どちらのリソースタイプにも、以下の主要な要素から構成されるジョブ設定が必要です。
- Red Hat OpenShift Service on AWS が作成する Pod を記述している Pod テンプレート。
parallelismパラメーター。ジョブの実行に使用する、同時に実行される Pod の数を指定します。-
非並列ジョブの場合は、未設定のままにします。未設定の場合は、デフォルトの
1に設定されます。
-
非並列ジョブの場合は、未設定のままにします。未設定の場合は、デフォルトの
completionsパラメーター。ジョブを完了するために必要な、正常に完了した Pod の数を指定します。-
非並列ジョブの場合は、未設定のままにします。未設定の場合は、デフォルトの
1に設定されます。 - 固定の完了数を持つ並列ジョブの場合は、値を指定します。
-
ワークキューのある並列ジョブでは、未設定のままにします。未設定の場合、デフォルトは
parallelism値に設定されます。
-
非並列ジョブの場合は、未設定のままにします。未設定の場合は、デフォルトの
5.2.1.2. ジョブの最長期間を設定する方法
ジョブの定義時に、activeDeadlineSeconds フィールドを設定して最長期間を定義できます。これは秒単位で指定され、デフォルトでは設定されません。設定されていない場合は、実施される最長期間はありません。
最長期間は、最初の Pod がスケジュールされた時点から計算され、ジョブが有効である期間を定義します。これは実行の全体の時間を追跡します。指定されたタイムアウトに達すると、Red Hat OpenShift Service on AWS がジョブを終了します。
5.2.1.3. 失敗した Pod のためのジョブのバックオフポリシーを設定する方法
ジョブは、設定の論理的なエラーなどの理由により再試行の設定回数を超えた後に失敗とみなされる場合があります。ジョブに関連付けられた失敗した Pod は 6 分を上限として指数関数的バックオフ遅延値 (10s、20s、40s …) に基づいて再作成されます。この制限は、コントローラーのチェック間で失敗した Pod が新たに生じない場合に再設定されます。
ジョブの再試行回数を設定するには spec.backoffLimit パラメーターを使用します。
5.2.1.4. アーティファクトを削除するように cron ジョブを設定する方法
Cron ジョブはジョブや Pod などのアーティファクトリーソースをそのままにすることがあります。ユーザーは履歴制限を設定して古いジョブとそれらの Pod が適切に消去されるようにすることが重要です。これに対応する 2 つのフィールドが cron ジョブ仕様にあります。
-
.spec.successfulJobsHistoryLimit。保持する成功した終了済みジョブの数 (デフォルトは 3 に設定)。 -
.spec.failedJobsHistoryLimit。保持する失敗した終了済みジョブの数 (デフォルトは 1 に設定)。
5.2.1.5. 既知の制限
ジョブ仕様の再起動ポリシーは Pod にのみ適用され、ジョブコントローラー には適用されません。ただし、ジョブコントローラーはジョブを完了まで再試行するようハードコーディングされます。
そのため restartPolicy: Never または --restart=Never により、restartPolicy: OnFailure または --restart=OnFailure と同じ動作が実行されます。つまり、ジョブが失敗すると、成功するまで (または手動で破棄されるまで) 自動で再起動します。このポリシーは再起動するサブシステムのみを設定します。
Never ポリシーでは、ジョブコントローラー が再起動を実行します。それぞれの再試行時に、ジョブコントローラーはジョブステータスの失敗数を増分し、新規 Pod を作成します。これは、それぞれの試行が失敗するたびに Pod の数が増えることを意味します。
OnFailure ポリシーでは、kubelet が再起動を実行します。それぞれの試行によりジョブステータスでの失敗数が増分する訳ではありません。さらに、kubelet は同じノードで Pod の起動に失敗したジョブを再試行します。
5.2.2. ジョブの作成
Red Hat OpenShift Service on AWS でジョブを作成するには、ジョブオブジェクトを作成します。
手順
ジョブを作成するには、以下を実行します。
以下のような YAML ファイルを作成します。
apiVersion: batch/v1 kind: Job metadata: name: pi spec: parallelism: 11 completions: 12 activeDeadlineSeconds: 18003 backoffLimit: 64 template:5 metadata: name: pi spec: containers: - name: pi image: perl command: ["perl", "-Mbignum=bpi", "-wle", "print bpi(2000)"] restartPolicy: OnFailure6 #...- 1
- オプション: ジョブを並行して実行する Pod レプリカの数を指定します。デフォルトは
1です。-
非並列ジョブの場合は、未設定のままにします。未設定の場合は、デフォルトの
1に設定されます。
-
非並列ジョブの場合は、未設定のままにします。未設定の場合は、デフォルトの
- 2
- オプション: ジョブの完了をマークするために必要な Pod の正常な完了の数を指定します。
-
非並列ジョブの場合は、未設定のままにします。未設定の場合は、デフォルトの
1に設定されます。 - 固定の完了数を持つ並列ジョブの場合、完了の数を指定します。
-
ワークキューのある並列ジョブでは、未設定のままにします。未設定の場合、デフォルトは
parallelism値に設定されます。
-
非並列ジョブの場合は、未設定のままにします。未設定の場合は、デフォルトの
- 3
- オプション: ジョブを実行できる最大期間を指定します。
- 4
- オプション: ジョブの再試行回数を指定します。このフィールドは、デフォルトでは 6 に設定されています。
- 5
- コントローラーが作成する Pod のテンプレートを指定します。
- 6
- Pod の再起動ポリシーを指定します。
-
Never: ジョブを再起動しません。 -
OnFailure: ジョブが失敗した場合にのみ再起動します。 Alwaysジョブを常に再起動します。Red Hat OpenShift Service on AWS が失敗したコンテナーに再起動ポリシーを使用する方法の詳細は、Kubernetes ドキュメントの Example States を参照してください。
-
ジョブを作成します。
$ oc create -f <file-name>.yaml
oc create job を使用して単一コマンドからジョブを作成し、起動することもできます。以下のコマンドは直前の例に指定されている同じジョブを作成し、これを起動します。
$ oc create job pi --image=perl -- perl -Mbignum=bpi -wle 'print bpi(2000)'5.2.3. cron ジョブの作成
Red Hat OpenShift Service on AWS で cron ジョブを作成するには、ジョブオブジェクトを作成します。
手順
cron ジョブを作成するには、以下を実行します。
以下のような YAML ファイルを作成します。
apiVersion: batch/v1 kind: CronJob metadata: name: pi spec: schedule: "*/1 * * * *"1 concurrencyPolicy: "Replace"2 startingDeadlineSeconds: 2003 suspend: true4 successfulJobsHistoryLimit: 35 failedJobsHistoryLimit: 16 jobTemplate:7 spec: template: metadata: labels:8 parent: "cronjobpi" spec: containers: - name: pi image: perl command: ["perl", "-Mbignum=bpi", "-wle", "print bpi(2000)"] restartPolicy: OnFailure9 - 1
- cron 形式 で指定されたジョブのスケジュール。この例では、ジョブは毎分実行されます。
- 2
- オプションの同時実行ポリシー。cron ジョブ内での同時実行ジョブを処理する方法を指定します。以下の同時実行ポリシーの 1 つのみを指定できます。これが指定されない場合、同時実行を許可するようにデフォルト設定されます。
-
Allow: cron ジョブを同時に実行できます。 -
Forbid: 同時実行を禁止し、直前の実行が終了していない場合は次の実行を省略します。 -
Replace: 同時に実行されているジョブを取り消し、これを新規ジョブに置き換えます。
-
- 3
- ジョブを開始するためのオプションの期限 (秒単位)(何らかの理由によりスケジュールされた時間が経過する場合)。ジョブの実行が行われない場合、ジョブの失敗としてカウントされます。これが指定されない場合は期間が設定されません。
- 4
- cron ジョブの停止を許可するオプションのフラグ。これが
trueに設定されている場合、後続のすべての実行が停止されます。 - 5
- 保持する成功した終了済みジョブの数 (デフォルトは 3 に設定)。
- 6
- 保持する失敗した終了済みジョブの数 (デフォルトは 1 に設定)。
- 7
- ジョブテンプレート。これはジョブの例と同様です。
- 8
- この cron ジョブで生成されるジョブのラベルを設定します。
- 9
- Pod の再起動ポリシー。ジョブコントローラーには適用されません。注記
.spec.successfulJobsHistoryLimitと.spec.failedJobsHistoryLimitのフィールドはオプションです。これらのフィールドでは、完了したジョブと失敗したジョブのそれぞれを保存する数を指定します。デフォルトで、これらのジョブの保存数はそれぞれ3と1に設定されます。制限に0を設定すると、終了後に対応する種類のジョブのいずれも保持しません。
cron ジョブを作成します。
$ oc create -f <file-name>.yaml
oc create cronjob を使用して単一コマンドから cron ジョブを作成し、起動することもできます。以下のコマンドは直前の例で指定されている同じ cron ジョブを作成し、これを起動します。
$ oc create cronjob pi --image=perl --schedule='*/1 * * * *' -- perl -Mbignum=bpi -wle 'print bpi(2000)'
oc create cronjob で、--schedule オプションは cron 形式 のスケジュールを受け入れます。
第6章 ノードの使用
6.1. Red Hat OpenShift Service on AWS クラスター内のノードの閲覧とリスト表示
クラスターのすべてのノードをリスト表示し、ステータスや経過時間、メモリー使用量などの情報およびノードの詳細を取得できます。
ノード管理の操作を実行すると、CLI は実際のノードホストの表現であるノードオブジェクトと対話します。マスターはノードオブジェクトの情報を使用してヘルスチェックでノードを検証します。
ワーカーノードは永続性が保証されておらず、OpenShift の通常の運用および管理の一環として、いつでも置き換えられる可能性があります。ノードのライフサイクルの詳細は、関連情報 を参照してください。
6.1.1. クラスター内のすべてのノードの一覧表示について
クラスター内のノードに関する詳細な情報を取得できます。
以下のコマンドは、すべてのノードをリスト表示します。
$ oc get nodes以下の例は、正常なノードを持つクラスターです。
$ oc get nodes出力例
NAME STATUS ROLES AGE VERSION master.example.com Ready master 7h v1.33.4 node1.example.com Ready worker 7h v1.33.4 node2.example.com Ready worker 7h v1.33.4以下の例は、正常でないノードが 1 つ含まれるクラスターです。
$ oc get nodes出力例
NAME STATUS ROLES AGE VERSION master.example.com Ready master 7h v1.33.4 node1.example.com NotReady,SchedulingDisabled worker 7h v1.33.4 node2.example.com Ready worker 7h v1.33.4NotReadyステータスをトリガーする条件は、このセクションの後半で説明します。-o wideオプションは、ノードに関する追加情報を提供します。$ oc get nodes -o wide出力例
NAME STATUS ROLES AGE VERSION INTERNAL-IP EXTERNAL-IP OS-IMAGE KERNEL-VERSION CONTAINER-RUNTIME master.example.com Ready master 171m v1.33.4 10.0.129.108 <none> Red Hat Enterprise Linux CoreOS 48.83.202103210901-0 (Ootpa) 4.20.0-240.15.1.el8_3.x86_64 cri-o://1.33.4-30.rhaos4.10.gitf2f339d.el8-dev node1.example.com Ready worker 72m v1.33.4 10.0.129.222 <none> Red Hat Enterprise Linux CoreOS 48.83.202103210901-0 (Ootpa) 4.20.0-240.15.1.el8_3.x86_64 cri-o://1.33.4-30.rhaos4.10.gitf2f339d.el8-dev node2.example.com Ready worker 164m v1.33.4 10.0.142.150 <none> Red Hat Enterprise Linux CoreOS 48.83.202103210901-0 (Ootpa) 4.20.0-240.15.1.el8_3.x86_64 cri-o://1.33.4-30.rhaos4.10.gitf2f339d.el8-dev以下のコマンドは、単一のノードに関する情報をリスト表示します。
$ oc get node <node>以下に例を示します。
$ oc get node node1.example.com出力例
NAME STATUS ROLES AGE VERSION node1.example.com Ready worker 7h v1.33.4以下のコマンドを実行すると、現在の状態の理由を含む、特定ノードの詳細情報を取得できます。
$ oc describe node <node>以下に例を示します。
$ oc describe node node1.example.com注記以下の例には、Red Hat OpenShift Service on AWS に固有の値がいくつか含まれています。
出力例
Name: node1.example.com1 Roles: worker2 Labels: kubernetes.io/os=linux kubernetes.io/hostname=ip-10-0-131-14 kubernetes.io/arch=amd643 node-role.kubernetes.io/worker= node.kubernetes.io/instance-type=m4.large node.openshift.io/os_id=rhcos node.openshift.io/os_version=4.5 region=east topology.kubernetes.io/region=us-east-1 topology.kubernetes.io/zone=us-east-1a Annotations: cluster.k8s.io/machine: openshift-machine-api/ahardin-worker-us-east-2a-q5dzc4 machineconfiguration.openshift.io/currentConfig: worker-309c228e8b3a92e2235edd544c62fea8 machineconfiguration.openshift.io/desiredConfig: worker-309c228e8b3a92e2235edd544c62fea8 machineconfiguration.openshift.io/state: Done volumes.kubernetes.io/controller-managed-attach-detach: true CreationTimestamp: Wed, 13 Feb 2019 11:05:57 -0500 Taints: <none>5 Unschedulable: false Conditions:6 Type Status LastHeartbeatTime LastTransitionTime Reason Message ---- ------ ----------------- ------------------ ------ ------- OutOfDisk False Wed, 13 Feb 2019 15:09:42 -0500 Wed, 13 Feb 2019 11:05:57 -0500 KubeletHasSufficientDisk kubelet has sufficient disk space available MemoryPressure False Wed, 13 Feb 2019 15:09:42 -0500 Wed, 13 Feb 2019 11:05:57 -0500 KubeletHasSufficientMemory kubelet has sufficient memory available DiskPressure False Wed, 13 Feb 2019 15:09:42 -0500 Wed, 13 Feb 2019 11:05:57 -0500 KubeletHasNoDiskPressure kubelet has no disk pressure PIDPressure False Wed, 13 Feb 2019 15:09:42 -0500 Wed, 13 Feb 2019 11:05:57 -0500 KubeletHasSufficientPID kubelet has sufficient PID available Ready True Wed, 13 Feb 2019 15:09:42 -0500 Wed, 13 Feb 2019 11:07:09 -0500 KubeletReady kubelet is posting ready status Addresses:7 InternalIP: 10.0.140.16 InternalDNS: ip-10-0-140-16.us-east-2.compute.internal Hostname: ip-10-0-140-16.us-east-2.compute.internal Capacity:8 attachable-volumes-aws-ebs: 39 cpu: 2 hugepages-1Gi: 0 hugepages-2Mi: 0 memory: 8172516Ki pods: 250 Allocatable: attachable-volumes-aws-ebs: 39 cpu: 1500m hugepages-1Gi: 0 hugepages-2Mi: 0 memory: 7558116Ki pods: 250 System Info:9 Machine ID: 63787c9534c24fde9a0cde35c13f1f66 System UUID: EC22BF97-A006-4A58-6AF8-0A38DEEA122A Boot ID: f24ad37d-2594-46b4-8830-7f7555918325 Kernel Version: 3.10.0-957.5.1.el7.x86_64 OS Image: Red Hat Enterprise Linux CoreOS 410.8.20190520.0 (Ootpa) Operating System: linux Architecture: amd64 Container Runtime Version: cri-o://1.33.4-0.6.dev.rhaos4.3.git9ad059b.el8-rc2 Kubelet Version: v1.33.4 Kube-Proxy Version: v1.33.4 PodCIDR: 10.128.4.0/24 ProviderID: aws:///us-east-2a/i-04e87b31dc6b3e171 Non-terminated Pods: (12 in total)10 Namespace Name CPU Requests CPU Limits Memory Requests Memory Limits --------- ---- ------------ ---------- --------------- ------------- openshift-cluster-node-tuning-operator tuned-hdl5q 0 (0%) 0 (0%) 0 (0%) 0 (0%) openshift-dns dns-default-l69zr 0 (0%) 0 (0%) 0 (0%) 0 (0%) openshift-image-registry node-ca-9hmcg 0 (0%) 0 (0%) 0 (0%) 0 (0%) openshift-ingress router-default-76455c45c-c5ptv 0 (0%) 0 (0%) 0 (0%) 0 (0%) openshift-machine-config-operator machine-config-daemon-cvqw9 20m (1%) 0 (0%) 50Mi (0%) 0 (0%) openshift-marketplace community-operators-f67fh 0 (0%) 0 (0%) 0 (0%) 0 (0%) openshift-monitoring alertmanager-main-0 50m (3%) 50m (3%) 210Mi (2%) 10Mi (0%) openshift-monitoring node-exporter-l7q8d 10m (0%) 20m (1%) 20Mi (0%) 40Mi (0%) openshift-monitoring prometheus-adapter-75d769c874-hvb85 0 (0%) 0 (0%) 0 (0%) 0 (0%) openshift-multus multus-kw8w5 0 (0%) 0 (0%) 0 (0%) 0 (0%) openshift-ovn-kubernetes ovnkube-node-t4dsn 80m (0%) 0 (0%) 1630Mi (0%) 0 (0%) Allocated resources: (Total limits may be over 100 percent, i.e., overcommitted.) Resource Requests Limits -------- -------- ------ cpu 380m (25%) 270m (18%) memory 880Mi (11%) 250Mi (3%) attachable-volumes-aws-ebs 0 0 Events:11 Type Reason Age From Message ---- ------ ---- ---- ------- Normal NodeHasSufficientPID 6d (x5 over 6d) kubelet, m01.example.com Node m01.example.com status is now: NodeHasSufficientPID Normal NodeAllocatableEnforced 6d kubelet, m01.example.com Updated Node Allocatable limit across pods Normal NodeHasSufficientMemory 6d (x6 over 6d) kubelet, m01.example.com Node m01.example.com status is now: NodeHasSufficientMemory Normal NodeHasNoDiskPressure 6d (x6 over 6d) kubelet, m01.example.com Node m01.example.com status is now: NodeHasNoDiskPressure Normal NodeHasSufficientDisk 6d (x6 over 6d) kubelet, m01.example.com Node m01.example.com status is now: NodeHasSufficientDisk Normal NodeHasSufficientPID 6d kubelet, m01.example.com Node m01.example.com status is now: NodeHasSufficientPID Normal Starting 6d kubelet, m01.example.com Starting kubelet. #...- 1
- ノードの名前。
- 2
- ノードのロール (
masterまたはworkerのいずれか)。 - 3
- ノードに適用されたラベル。
- 4
- ノードに適用されるアノテーション。
- 5
- ノードに適用された taint。
- 6
- ノードの状態およびステータス。
conditionsスタンザには、Ready、PIDPressure、MemoryPressure、DiskPressure、およびOutOfDiskステータスがリスト表示されます。これらの状態は、このセクションの後半で説明します。 - 7
- ノードの IP アドレスとホスト名。
- 8
- Pod のリソースと割り当て可能なリソース。
- 9
- ノードホストに関する情報。
- 10
- ノードの Pod。
- 11
- ノードが報告したイベント。
ノードに関する情報の中でも、とりわけ以下のノードの状態がこのセクションで説明されるコマンドの出力に表示されます。
| 条件 | 説明 |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ノードに配置するように Pod をスケジュールすることができません。 |
6.1.2. クラスターでのノード上の Pod のリスト表示
特定のノード上のすべての Pod をリスト表示できます。
手順
選択したノードのすべてまたは選択した Pod をリスト表示するには、以下を実行します。
$ oc get pod --selector=<nodeSelector>$ oc get pod --selector=kubernetes.io/osまたは、以下を実行します。
$ oc get pod -l=<nodeSelector>$ oc get pod -l kubernetes.io/os=linux終了した Pod を含む、特定のノード上のすべての Pod をリスト表示するには、以下を実行します。
$ oc get pod --all-namespaces --field-selector=spec.nodeName=<nodename>
6.1.3. ノードのメモリーと CPU 使用統計の表示
コンテナーのランタイム環境を提供する、ノードに関する使用状況の統計を表示できます。これらの使用状況の統計には CPU、メモリー、およびストレージの消費量が含まれます。
前提条件
-
使用状況の統計を表示するには、
cluster-reader権限が必要です。 - 使用状況の統計を表示するには、メトリクスをインストールしている必要があります。
手順
使用状況の統計を表示するには、以下を実行します。
$ oc adm top nodes出力例
NAME CPU(cores) CPU% MEMORY(bytes) MEMORY% ip-10-0-12-143.ec2.compute.internal 1503m 100% 4533Mi 61% ip-10-0-132-16.ec2.compute.internal 76m 5% 1391Mi 18% ip-10-0-140-137.ec2.compute.internal 398m 26% 2473Mi 33% ip-10-0-142-44.ec2.compute.internal 656m 43% 6119Mi 82% ip-10-0-146-165.ec2.compute.internal 188m 12% 3367Mi 45% ip-10-0-19-62.ec2.compute.internal 896m 59% 5754Mi 77% ip-10-0-44-193.ec2.compute.internal 632m 42% 5349Mi 72%ラベルの付いたノードの使用状況の統計を表示するには、以下を実行します。
$ oc adm top node --selector=''フィルターに使用するセレクター (ラベルクエリー) を選択する必要があります。
=、==、および!=をサポートします。
関連情報
6.2. ノードの使用
管理者は、複数のタスクを実行して、クラスターを効率化できます。oc adm コマンドを使用して、特定のノードを遮断、遮断解除、およびドレインすることができます。
遮断とドレインは、Red Hat OpenShift Cluster Manager マシンプールの一部であるワーカーノードでのみ許可されます。
6.2.1. ノード上の Pod を退避させる方法
Pod を退避させると、所定のノードからすべての Pod または選択した Pod を移行できます。
退避させることができるのは、レプリケーションコントローラーが管理している Pod のみです。レプリケーションコントローラーは、他のノードに新しい Pod を作成し、指定されたノードから既存の Pod を削除します。
ベア Pod、つまりレプリケーションコントローラーが管理していない Pod はデフォルトで影響を受けません。Pod セレクターを指定すると Pod のサブセットを退避できます。Pod セレクターはラベルに基づくので、指定したラベルを持つすべての Pod を退避できます。
手順
Pod の退避を実行する前に、ノードをスケジュール対象外としてマークします。
ノードをスケジューリング対象外としてマークします。
$ oc adm cordon <node1>出力例
node/<node1> cordonedノードのステータスが
Ready,SchedulingDisabledであることを確認します。$ oc get node <node1>出力例
NAME STATUS ROLES AGE VERSION <node1> Ready,SchedulingDisabled worker 1d v1.33.4
以下の方法のいずれかを使用して Pod を退避します。
1 つ以上のノードで、すべてまたは選択した Pod を退避します。
$ oc adm drain <node1> <node2> [--pod-selector=<pod_selector>]--forceオプションを使用してベア Pod の削除を強制的に実行します。trueに設定されると、Pod がレプリケーションコントローラー、レプリカセット、ジョブ、デーモンセット、またはステートフルセットで管理されていない場合でも削除が続行されます。$ oc adm drain <node1> <node2> --force=true--grace-periodを使用して、各 Pod をグレースフルに終了するための期間 (秒単位) を設定します。負の値の場合には、Pod に指定されるデフォルト値が使用されます。$ oc adm drain <node1> <node2> --grace-period=-1trueに設定された--ignore-daemonsetsフラグを使用してデーモンセットが管理する Pod を無視します。$ oc adm drain <node1> <node2> --ignore-daemonsets=true--timeoutを使用して、中止する前の待機期間を設定します。値0は無限の時間を設定します。$ oc adm drain <node1> <node2> --timeout=5s--delete-emptydir-dataフラグをtrueに設定して、emptyDirボリュームを使用する Pod がある場合にも Pod を削除します。ローカルデータはノードが drain される場合に削除されます。$ oc adm drain <node1> <node2> --delete-emptydir-data=truetrueに設定された--dry-runオプションを使用して、実際に退避を実行せずに移行するオブジェクトをリスト表示します。$ oc adm drain <node1> <node2> --dry-run=true特定のノード名 (例:
<node1> <node2>) を指定する代わりに、--selector=<node_selector>オプションを使用し、選択したノードで Pod を退避することができます。
完了したら、ノードにスケジュール対象のマークを付けます。
$ oc adm uncordon <node1>
6.3. Node Tuning Operator の使用
Red Hat OpenShift Service on AWS は、クラスター上のノードのパフォーマンスを向上させる Node Tuning Operator をサポートしています。ノード調整設定を作成する前に、カスタム調整仕様を作成する必要があります。
Node Tuning Operator は、TuneD デーモンを調整することでノードレベルのチューニングを管理し、Performance Profile コントローラーを使用して低レイテンシーのパフォーマンスを実現するのに役立ちます。ほとんどの高パフォーマンスアプリケーションでは、一定レベルのカーネルのチューニングが必要です。Node Tuning Operator は、ノードレベルの sysctl の統一された管理インターフェイスをユーザーに提供し、ユーザーが指定するカスタムチューニングを追加できるよう柔軟性を提供します。
Operator は、コンテナー化された Red Hat OpenShift Service on AWS の TuneD デーモンを Kubernetes デーモンセットとして管理します。これにより、カスタムチューニング仕様が、デーモンが認識する形式でクラスターで実行されるすべてのコンテナー化された TuneD デーモンに渡されます。デーモンは、ノードごとに 1 つずつ、クラスターのすべてのノードで実行されます。
コンテナー化された TuneD デーモンによって適用されるノードレベルの設定は、プロファイルの変更をトリガーするイベントで、または終了シグナルの受信および処理によってコンテナー化された TuneD デーモンがグレースフルに終了する際にロールバックされます。
Node Tuning Operator は、Performance Profile コントローラーを使用して自動チューニングを実装し、Red Hat OpenShift Service on AWS アプリケーションの低レイテンシーパフォーマンスを実現します。
クラスター管理者は、以下のようなノードレベルの設定を定義するパフォーマンスプロファイルを設定します。
- カーネルを kernel-rt に更新します。
- ハウスキーピング用の CPU を選択します。
- 実行中のワークロード用の CPU を選択します。
Node Tuning Operator は、バージョン 4.1 以降の標準の Red Hat OpenShift Service on AWS インストールに含まれています。
Red Hat OpenShift Service on AWS の以前のバージョンでは、OpenShift アプリケーションの低レイテンシーパフォーマンスを実現する自動チューニングを実装するために Performance Addon Operator が使用されていました。Red Hat OpenShift Service on AWS 4.11 以降では、この機能は Node Tuning Operator の一部です。
6.3.1. カスタムチューニング仕様
Operator のカスタムリソース (CR) には 2 つの重要なセクションがあります。1 つ目のセクションの profile: は TuneD プロファイルおよびそれらの名前のリストです。2 つ目の recommend: は、プロファイル選択ロジックを定義します。
複数のカスタムチューニング仕様は、Operator の namespace に複数の CR として共存できます。新規 CR の存在または古い CR の削除は Operator によって検出されます。既存のカスタムチューニング仕様はすべてマージされ、コンテナー化された TuneD デーモンの適切なオブジェクトは更新されます。
管理状態
Operator 管理の状態は、デフォルトの Tuned CR を調整して設定されます。デフォルトで、Operator は Managed 状態であり、spec.managementState フィールドはデフォルトの Tuned CR に表示されません。Operator Management 状態の有効な値は以下のとおりです。
- Managed: Operator は設定リソースが更新されるとそのオペランドを更新します。
- Unmanaged: Operator は設定リソースへの変更を無視します。
- Removed: Operator は Operator がプロビジョニングしたオペランドおよびリソースを削除します。
プロファイルデータ
profile: セクションは、TuneD プロファイルおよびそれらの名前をリスト表示します。
profile:
- name: tuned_profile_1
data: |
# TuneD profile specification
[main]
summary=Description of tuned_profile_1 profile
[sysctl]
net.ipv4.ip_forward=1
# ... other sysctl's or other TuneD daemon plugins supported by the containerized TuneD
# ...
- name: tuned_profile_n
data: |
# TuneD profile specification
[main]
summary=Description of tuned_profile_n profile
# tuned_profile_n profile settings推奨プロファイル
profile: 選択ロジックは、CR の recommend: セクションによって定義されます。recommend: セクションは、選択基準に基づくプロファイルの推奨項目のリストです。
recommend:
<recommend-item-1>
# ...
<recommend-item-n>リストの個別項目:
- machineConfigLabels:
<mcLabels>
match:
<match>
priority: <priority>
profile: <tuned_profile_name>
operand:
debug: <bool>
tunedConfig:
reapply_sysctl: <bool> - 1
- オプション。
- 2
- キー/値の
MachineConfigラベルのディクショナリー。キーは一意である必要があります。 - 3
- 省略する場合は、優先度の高いプロファイルが最初に一致するか、
machineConfigLabelsが設定されていない限り、プロファイルの一致が想定されます。 - 4
- オプションのリスト。
- 5
- プロファイルの順序付けの優先度。数値が小さいほど優先度が高くなります (
0が最も高い優先度になります)。 - 6
- 一致に適用する TuneD プロファイル。例:
tuned_profile_1 - 7
- オプションのオペランド設定。
- 8
- TuneD デーモンのデバッグオンまたはオフを有効にします。オプションは、オンの場合は
true、オフの場合はfalseです。デフォルトはfalseです。 - 9
- TuneD デーモンの
reapply_sysctl機能をオンまたはオフにします。オプションは on でtrue、オフの場合はfalseです。
<match> は、以下のように再帰的に定義されるオプションの一覧です。
- label: <label_name>
value: <label_value>
type: <label_type>
<match>
<match> が省略されない場合、ネストされたすべての <match> セクションが true に評価される必要もあります。そうでない場合には false が想定され、それぞれの <match> セクションのあるプロファイルは適用されず、推奨されません。そのため、ネスト化 (子の <match> セクション) は論理 AND 演算子として機能します。これとは逆に、<match> 一覧のいずれかの項目が一致する場合は、<match> の一覧全体が true に評価されます。そのため、リストは論理 OR 演算子として機能します。
machineConfigLabels が定義されている場合は、マシン設定プールベースのマッチングが指定の recommend: 一覧の項目に対してオンになります。<mcLabels> はマシン設定のラベルを指定します。マシン設定は、プロファイル <tuned_profile_name> にカーネル起動パラメーターなどのホスト設定を適用するために自動的に作成されます。この場合は、マシン設定セレクターが <mcLabels> に一致するすべてのマシン設定プールを検索し、プロファイル <tuned_profile_name> を確認されるマシン設定プールが割り当てられるすべてのノードに設定する必要があります。マスターロールとワーカーのロールの両方を持つノードをターゲットにするには、マスターロールを使用する必要があります。
リスト項目の match および machineConfigLabels は論理 OR 演算子によって接続されます。match 項目は、最初にショートサーキット方式で評価されます。そのため、true と評価される場合、machineConfigLabels 項目は考慮されません。
マシン設定プールベースのマッチングを使用する場合は、同じハードウェア設定を持つノードを同じマシン設定プールにグループ化することが推奨されます。この方法に従わない場合は、TuneD オペランドが同じマシン設定プールを共有する 2 つ以上のノードの競合するカーネルパラメーターを計算する可能性があります。
例: ノードまたは Pod のラベルベースのマッチング
- match:
- label: tuned.openshift.io/elasticsearch
match:
- label: node-role.kubernetes.io/master
- label: node-role.kubernetes.io/infra
type: pod
priority: 10
profile: openshift-control-plane-es
- match:
- label: node-role.kubernetes.io/master
- label: node-role.kubernetes.io/infra
priority: 20
profile: openshift-control-plane
- priority: 30
profile: openshift-node
上記のコンテナー化された TuneD デーモンの CR は、プロファイルの優先順位に基づいてその recommend.conf ファイルに変換されます。最も高い優先順位 (10) を持つプロファイルは openshift-control-plane-es であるため、これが最初に考慮されます。指定されたノードで実行されるコンテナー化された TuneD デーモンは、同じノードに tuned.openshift.io/elasticsearch ラベルが設定された Pod が実行されているかどうかを確認します。これがない場合は、<match> セクション全体が false として評価されます。このラベルを持つこのような Pod がある場合に、<match> セクションが true に評価されるようにするには、ノードラベルを node-role.kubernetes.io/master または node-role.kubernetes.io/infra にする必要もあります。
優先順位が 10 のプロファイルのラベルが一致した場合は、openshift-control-plane-es プロファイルが適用され、その他のプロファイルは考慮されません。ノード/Pod ラベルの組み合わせが一致しない場合は、2 番目に高い優先順位プロファイル (openshift-control-plane) が考慮されます。このプロファイルは、コンテナー化された TuneD Pod が node-role.kubernetes.io/master または node-role.kubernetes.io/infra ラベルを持つノードで実行される場合に適用されます。
最後に、プロファイル openshift-node には最低の優先順位である 30 が設定されます。これには <match> セクションがないため、常に一致します。これは、より高い優先順位の他のプロファイルが指定されたノードで一致しない場合に openshift-node プロファイルを設定するために、最低の優先順位のノードが適用される汎用的な (catch-all) プロファイルとして機能します。
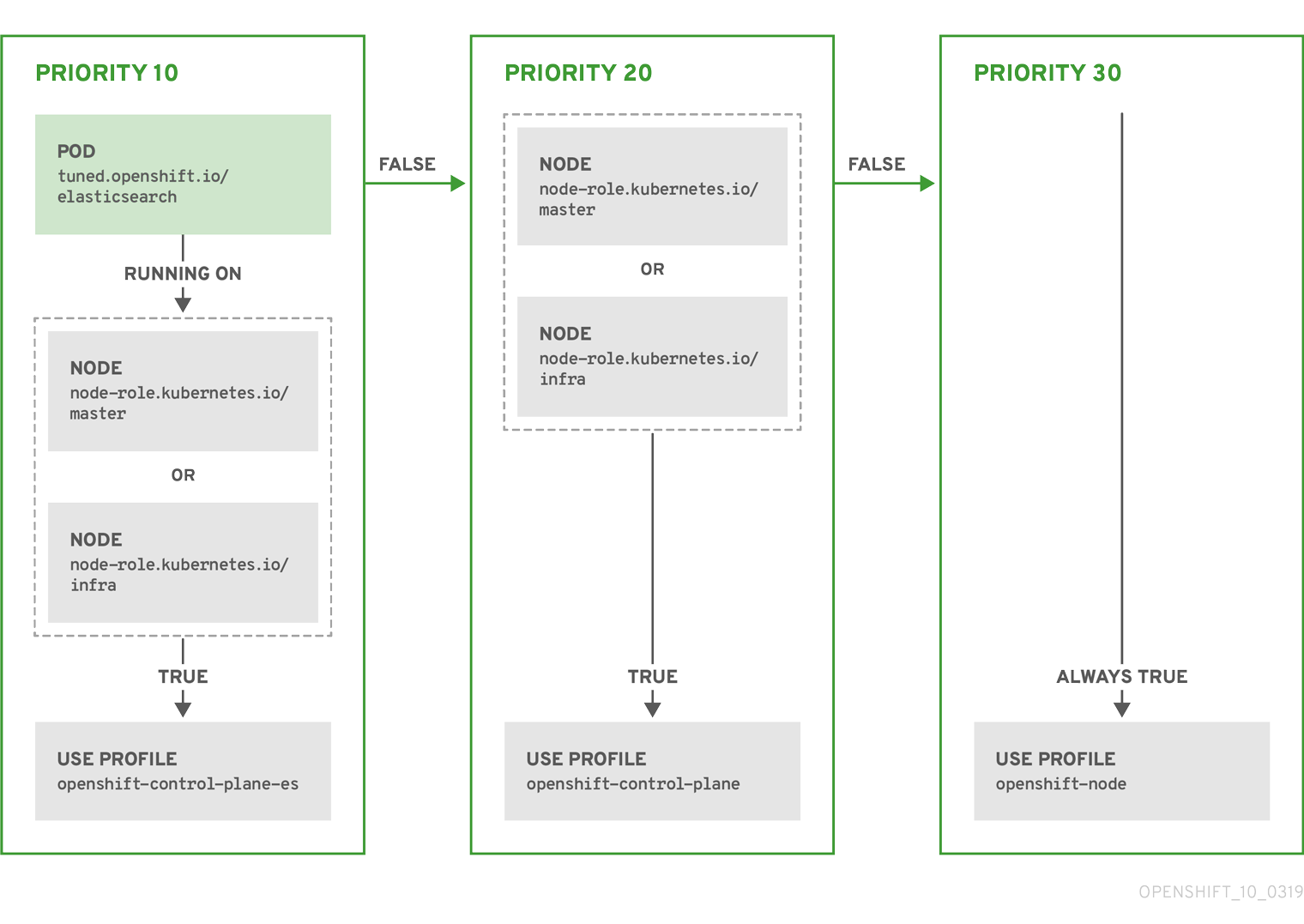
例: マシン設定プールベースのマッチング
apiVersion: tuned.openshift.io/v1
kind: Tuned
metadata:
name: openshift-node-custom
namespace: openshift-cluster-node-tuning-operator
spec:
profile:
- data: |
[main]
summary=Custom OpenShift node profile with an additional kernel parameter
include=openshift-node
[bootloader]
cmdline_openshift_node_custom=+skew_tick=1
name: openshift-node-custom
recommend:
- machineConfigLabels:
machineconfiguration.openshift.io/role: "worker-custom"
priority: 20
profile: openshift-node-customノードの再起動を最小限にするには、ターゲットノードにマシン設定プールのノードセレクターが一致するラベルを使用してラベルを付け、上記の Tuned CR を作成してから、最後にカスタムのマシン設定プール自体を作成します。
クラウドプロバイダー固有の TuneD プロファイル
この機能により、すべてのクラウドプロバイダー固有のノードに、Red Hat OpenShift Service on AWS クラスター上の特定のクラウドプロバイダーに合わせて特別に調整された TuneD プロファイルを簡単に割り当てることができます。これは、追加のノードラベルを追加したり、ノードをマシン設定プールにグループ化したりせずに実行できます。
この機能は、<cloud-provider>://<cloud-provider-specific-id> という形式の spec.providerID ノードオブジェクト値を利用し、NTO オペランドコンテナーに値 <cloud-provider> を持つファイル /var/lib/ocp-tuned/provider を書き込みます。その後、このファイルのコンテンツは TuneD により、プロバイダー provider-<cloud-provider> プロファイル (存在する場合) を読み込むために使用されます。
openshift-control-plane および openshift-node プロファイルの両方の設定を継承する openshift プロファイルは、条件付きプロファイルの読み込みを使用してこの機能を使用するよう更新されるようになりました。現時点で、NTO や TuneD にクラウドプロバイダー固有のプロファイルは含まれていません。ただし、すべてのクラウドプロバイダー固有のクラスターノードに適用されるカスタムプロファイル provider-<cloud-provider> を作成できます。
GCE クラウドプロバイダープロファイルの例
apiVersion: tuned.openshift.io/v1
kind: Tuned
metadata:
name: provider-gce
namespace: openshift-cluster-node-tuning-operator
spec:
profile:
- data: |
[main]
summary=GCE Cloud provider-specific profile
# Your tuning for GCE Cloud provider goes here.
name: provider-gce
プロファイルの継承により、provider-<cloud-provider> プロファイルで指定された設定は、openshift プロファイルとその子プロファイルによってオーバーライドされます。
6.3.2. ノードのチューニング設定の作成
Red Hat OpenShift Service on AWS (ROSA) CLI (rosa) を使用してチューニング設定を作成できます。
前提条件
- ROSA CLI の最新バージョンをダウンロードしている。
- 最新バージョンのクラスターがある。
- ノードチューニング用に設定された仕様ファイルがある。
手順
次のコマンドを実行して、チューニング設定を作成します。
$ rosa create tuning-config -c <cluster_id> --name <name_of_tuning> --spec-path <path_to_spec_file>spec.jsonファイルへのパスを指定する必要があります。指定しない場合、コマンドはエラーを返します。$ I: Tuning config 'sample-tuning' has been created on cluster 'cluster-example'.$ I: To view all tuning configs, run 'rosa list tuning-configs -c cluster-example'
検証
次のコマンドを使用して、アカウントによって適用されている既存のチューニング設定を確認できます。
$ rosa list tuning-configs -c <cluster_name> [-o json]設定リストに必要な出力のタイプを指定できます。
出力タイプを指定しないと、チューニング設定の ID と名前が表示されます。
出力タイプを指定しない場合の出力例
ID NAME 20468b8e-edc7-11ed-b0e4-0a580a800298 sample-tuningjsonなどの出力タイプを指定すると、チューニング設定を JSON テキストとして受け取ります。注記次の JSON 出力には、読みやすくするために改行が含まれています。この JSON 出力は、JSON 文字列内の改行を削除しない限り無効です。
JSON 出力を指定した場合の出力例
[ { "kind": "TuningConfig", "id": "20468b8e-edc7-11ed-b0e4-0a580a800298", "href": "/api/clusters_mgmt/v1/clusters/23jbsevqb22l0m58ps39ua4trff9179e/tuning_configs/20468b8e-edc7-11ed-b0e4-0a580a800298", "name": "sample-tuning", "spec": { "profile": [ { "data": "[main]\nsummary=Custom OpenShift profile\ninclude=openshift-node\n\n[sysctl]\nvm.dirty_ratio=\"55\"\n", "name": "tuned-1-profile" } ], "recommend": [ { "priority": 20, "profile": "tuned-1-profile" } ] } } ]
6.3.3. ノードのチューニング設定の変更
Red Hat OpenShift Service on AWS (ROSA) CLI (rosa) を使用して、ノードチューニング設定を表示し、更新できます。
前提条件
- ROSA CLI の最新バージョンをダウンロードしている。
- 最新バージョンのクラスターがある。
- クラスターにノード調整設定が追加されている。
手順
チューニング設定を表示するには、
rosa describeコマンドを使用します。$ rosa describe tuning-config -c <cluster_id>1 --name <name_of_tuning>2 [-o json]3 この仕様ファイルの次の項目は次のとおりです。
出力タイプを指定しない場合の出力例
Name: sample-tuning ID: 20468b8e-edc7-11ed-b0e4-0a580a800298 Spec: { "profile": [ { "data": "[main]\nsummary=Custom OpenShift profile\ninclude=openshift-node\n\n[sysctl]\nvm.dirty_ratio=\"55\"\n", "name": "tuned-1-profile" } ], "recommend": [ { "priority": 20, "profile": "tuned-1-profile" } ] }JSON 出力を指定した場合の出力例
{ "kind": "TuningConfig", "id": "20468b8e-edc7-11ed-b0e4-0a580a800298", "href": "/api/clusters_mgmt/v1/clusters/23jbsevqb22l0m58ps39ua4trff9179e/tuning_configs/20468b8e-edc7-11ed-b0e4-0a580a800298", "name": "sample-tuning", "spec": { "profile": [ { "data": "[main]\nsummary=Custom OpenShift profile\ninclude=openshift-node\n\n[sysctl]\nvm.dirty_ratio=\"55\"\n", "name": "tuned-1-profile" } ], "recommend": [ { "priority": 20, "profile": "tuned-1-profile" } ] } }チューニング設定を確認した後、
rosa editコマンドを使用して既存の設定を編集します。$ rosa edit tuning-config -c <cluster_id> --name <name_of_tuning> --spec-path <path_to_spec_file>このコマンドでは、
spec.jsonファイルを使用して設定を編集します。
検証
rosa describeコマンドを再度実行して、spec.jsonファイルに加えた変更がチューニング設定で更新されていることを確認します。$ rosa describe tuning-config -c <cluster_id> --name <name_of_tuning>出力例
Name: sample-tuning ID: 20468b8e-edc7-11ed-b0e4-0a580a800298 Spec: { "profile": [ { "data": "[main]\nsummary=Custom OpenShift profile\ninclude=openshift-node\n\n[sysctl]\nvm.dirty_ratio=\"55\"\n", "name": "tuned-2-profile" } ], "recommend": [ { "priority": 10, "profile": "tuned-2-profile" } ] }
6.3.4. ノードのチューニング設定の削除
Red Hat OpenShift Service on AWS (ROSA) CLI (rosa) を使用して、チューニング設定を削除できます。
マシンプールで参照されているチューニング設定は削除できません。チューニング設定を削除する前に、すべてのマシンプールからチューニング設定を削除する必要があります。
前提条件
- ROSA CLI の最新バージョンをダウンロードしている。
- 最新バージョンのクラスターがある。
- クラスターに、削除したいノードチューニング設定がある。
手順
チューニング設定を削除するには、次のコマンドを実行します。
$ rosa delete tuning-config -c <cluster_id> <name_of_tuning>クラスター上のチューニング設定が削除されました。
出力例
? Are you sure you want to delete tuning config sample-tuning on cluster sample-cluster? Yes I: Successfully deleted tuning config 'sample-tuning' from cluster 'sample-cluster'
第7章 コンテナーの使用
7.1. コンテナーについて
Red Hat OpenShift Service on AWS アプリケーションの基本的な単位は コンテナー と呼ばれています。Linux コンテナーテクノロジー は、指定されたリソースのみと対話するために実行中のプロセスを分離する軽量なメカニズムです。
数多くのアプリケーションインスタンスは、相互のプロセス、ファイル、ネットワークなどを可視化せずに単一ホストのコンテナーで実行される可能性があります。通常、コンテナーは任意のワークロードに使用されますが、各コンテナーは Web サーバーまたはデータベースなどの (通常は "マイクロサービス" と呼ばれることが多い) 単一サービスを提供します。
Linux カーネルは数年にわたりコンテナーテクノロジーの各種機能を統合してきました。Red Hat OpenShift Service on AWS および Kubernetes は、複数ホストのインストール間でコンテナーのオーケストレーションを実行する機能を追加します。
7.1.1. コンテナーおよび RHEL カーネルメモリーについて
Red Hat Enterprise Linux (RHEL) の動作により、CPU 使用率の高いノードのコンテナーは、予想以上に多いメモリーを消費しているように見える可能性があります。メモリー消費量の増加は、RHEL カーネルの kmem_cache によって引き起こされる可能性があります。RHEL カーネルは、それぞれの cgroup に kmem_cache を作成します。パフォーマンスの強化のために、kmem_cache には cpu_cache と任意の NUMA ノードのノードキャッシュが含まれます。これらのキャッシュはすべてカーネルメモリーを消費します。
これらのキャッシュに保存されるメモリーの量は、システムが使用する CPU の数に比例します。結果として、CPU の数が増えると、より多くのカーネルメモリーがこれらのキャッシュに保持されます。これらのキャッシュ内のカーネルメモリーの量が増えると、Red Hat OpenShift Service on AWS コンテナーが設定されたメモリー制限を超え、コンテナーが強制終了される可能性があります。
カーネルメモリーの問題によりコンテナーが失われないようにするには、コンテナーが十分なメモリーを要求することを確認します。以下の式を使用して、kmem_cache が消費するメモリー量を見積ることができます。この場合、nproc は、nproc コマンドで報告される利用可能なプロセス数です。コンテナーの要求の上限が低くなる場合、この値にコンテナーメモリーの要件を加えた分になります。
$(nproc) X 1/2 MiB7.1.2. コンテナーエンジンとコンテナーランタイムについて
コンテナーエンジン は、コマンドラインオプションやイメージのプルなど、ユーザーの要求を処理するソフトウェアです。コンテナーエンジンは、コンテナーランタイム (下位レベルのコンテナーランタイム とも呼ばれる) を使用して、コンテナーのデプロイと操作に必要なコンポーネントを実行および管理します。コンテナーエンジンまたはコンテナーランタイムとやり取りする必要はほとんどありません。
Red Hat OpenShift Service on AWS のドキュメントでは、コンテナーランタイム という用語は、下位レベルのコンテナーランタイムを指すために使用されています。他のドキュメントでは、コンテナーエンジンをコンテナーランタイムと呼んでいる場合があります。
Red Hat OpenShift Service on AWS は、コンテナーエンジンとして CRI-O を使用し、コンテナーランタイムとして crun または runC を使用します。デフォルトのコンテナーランタイムは crun です。
7.2. Pod のデプロイ前の、Init コンテナーの使用によるタスクの実行
Red Hat OpenShift Service on AWS は、init コンテナー を提供します。このコンテナーはアプリケーションコンテナーの前に実行される特殊なコンテナーであり、アプリケーションイメージに存在しないユーティリティーやセットアップスクリプトを含めることができます。
7.2.1. Init コンテナーについて
Pod の残りの部分がデプロイされる前に、init コンテナーリソースを使用して、タスクを実行することができます。
Pod は、アプリケーションコンテナーに加えて、init コンテナーを持つことができます。Init コンテナーにより、セットアップスクリプトとバインディングコードを再編成できます。
Init コンテナーは以下のことを行うことができます。
- セキュリティー上の理由のためにアプリケーションコンテナーイメージに含めることが望ましくないユーティリティーを含めることができ、それらを実行できます。
- アプリのイメージに存在しないセットアップに必要なユーティリティーまたはカスタムコードを含めることができます。たとえば、単に Sed、Awk、Python、Dig のようなツールをセットアップ時に使用するために別のイメージからイメージを作成する必要はありません。
- Linux namespace を使用して、アプリケーションコンテナーがアクセスできないシークレットへのアクセスなど、アプリケーションコンテナーとは異なるファイルシステムビューを設定できます。
各 Init コンテナーは、次のコンテナーが起動する前に正常に完了している必要があります。そのため、Init コンテナーには、一連の前提条件が満たされるまでアプリケーションコンテナーの起動をブロックしたり、遅延させたりする簡単な方法となります。
たとえば、以下は Init コンテナーを使用するいくつかの方法になります。
以下のようなシェルコマンドでサービスが作成されるまで待機します。
for i in {1..100}; do sleep 1; if dig myservice; then exit 0; fi; done; exit 1以下のようなコマンドを使用して、Downward API からリモートサーバーにこの Pod を登録します。
$ curl -X POST http://$MANAGEMENT_SERVICE_HOST:$MANAGEMENT_SERVICE_PORT/register -d ‘instance=$()&ip=$()’-
sleep 60のようなコマンドを使用して、アプリケーションコンテナーが起動するまでしばらく待機します。 - Git リポジトリーのクローンをボリュームに作成します。
- 設定ファイルに値を入力し、テンプレートツールを実行して、主要なアプリコンテナーの設定ファイルを動的に生成します。たとえば、設定ファイルに POD_IP の値を入力し、Jinja を使用して主要なアプリ設定ファイルを生成します。
詳細は、Kubernetes ドキュメント を参照してください。
7.2.2. Init コンテナーの作成
以下の例は、2 つの init コンテナーを持つ単純な Pod の概要を示しています。1 つ目は myservice を待機し、2 つ目は mydb を待機します。両方のコンテナーが完了すると、Pod が開始されます。
手順
Init コンテナーの Pod を作成します。
以下のような YAML ファイルを作成します。
apiVersion: v1 kind: Pod metadata: name: myapp-pod labels: app: myapp spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: myapp-container image: registry.access.redhat.com/ubi9/ubi:latest command: ['sh', '-c', 'echo The app is running! && sleep 3600'] securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] initContainers: - name: init-myservice image: registry.access.redhat.com/ubi9/ubi:latest command: ['sh', '-c', 'until getent hosts myservice; do echo waiting for myservice; sleep 2; done;'] securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] - name: init-mydb image: registry.access.redhat.com/ubi9/ubi:latest command: ['sh', '-c', 'until getent hosts mydb; do echo waiting for mydb; sleep 2; done;'] securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL]Pod を作成します。
$ oc create -f myapp.yamlPod のステータスを表示します。
$ oc get pods出力例
NAME READY STATUS RESTARTS AGE myapp-pod 0/1 Init:0/2 0 5sPod のステータス
Init:0/2は、2 つのサービスを待機していることを示します。
myserviceサービスを作成します。以下のような YAML ファイルを作成します。
kind: Service apiVersion: v1 metadata: name: myservice spec: ports: - protocol: TCP port: 80 targetPort: 9376Pod を作成します。
$ oc create -f myservice.yamlPod のステータスを表示します。
$ oc get pods出力例
NAME READY STATUS RESTARTS AGE myapp-pod 0/1 Init:1/2 0 5sPod のステータス
Init:1/2は、1 つのサービス (この場合はmydbサービス) を待機していることを示します。
mydbサービスを作成します。以下のような YAML ファイルを作成します。
kind: Service apiVersion: v1 metadata: name: mydb spec: ports: - protocol: TCP port: 80 targetPort: 9377Pod を作成します。
$ oc create -f mydb.yamlPod のステータスを表示します。
$ oc get pods出力例
NAME READY STATUS RESTARTS AGE myapp-pod 1/1 Running 0 2mPod のステータスは、サービスを待機しておらず、実行中であることを示していました。
7.3. ボリュームの使用によるコンテナーデータの永続化
コンテナー内のファイルは一時的なものです。そのため、コンテナーがクラッシュしたり停止したりした場合は、データが失われます。ボリューム を使用すると、Pod 内のコンテナーが使用しているデータを永続化できます。ボリュームはディレクトリーであり、Pod 内のコンテナーからアクセスすることができます。ここでは、データが Pod の有効期間中保存されます。
7.3.1. ボリュームについて
ボリュームとは Pod およびコンテナーで利用可能なマウントされたファイルシステムのことであり、これらは数多くのホストのローカルまたはネットワーク割り当てストレージのエンドポイントでサポートされる場合があります。コンテナーはデフォルトで永続性がある訳ではなく、それらのコンテンツは再起動時にクリアされます。
ボリューム上のファイルシステムにエラーがないことを確認し、エラーが存在する場合は可能な限り修復するために、Red Hat OpenShift Service on AWS は mount ユーティリティーより前に fsck ユーティリティーを呼び出します。これはボリュームを追加するか、既存ボリュームを更新する際に実行されます。
最も単純なボリュームタイプは emptyDir です。これは、単一マシンの一時的なディレクトリーです。管理者はユーザーによる Pod に自動的に割り当てられる永続ボリュームの要求を許可することもできます。
emptyDir ボリュームストレージは、FSGroup パラメーターがクラスター管理者によって有効にされている場合は Pod の FSGroup に基づいてクォータで制限できます。
7.3.2. Red Hat OpenShift Service on AWS CLI を使用したボリュームの操作
CLI コマンド oc set volume を使用して、レプリケーションコントローラーやデプロイメント設定などの Pod テンプレートを持つオブジェクトのボリュームおよびボリュームマウントを追加し、削除することができます。また、Pod または Pod テンプレートを持つオブジェクトのボリュームをリスト表示することもできます。
oc set volume コマンドは以下の一般的な構文を使用します。
$ oc set volume <object_selection> <operation> <mandatory_parameters> <options>- オブジェクトの選択
-
oc set volumeコマンドのobject_selectionパラメーターには、次のいずれかを指定します。
| 構文 | 説明 | 例 |
|---|---|---|
|
|
タイプ |
|
|
|
タイプ |
|
|
|
所定のラベルセレクターに一致するタイプ |
|
|
|
タイプ |
|
|
| リソースを編集するために使用するファイル名、ディレクトリー、または URL です。 |
|
- 操作
-
oc set volumeコマンドのoperationパラメーターに--addまたは--removeを指定します。 - 必須パラメーター
- いずれの必須パラメーターも選択された操作に固有のものであり、これらは後のセクションで説明します。
- オプション
- いずれのオプションも選択された操作に固有のものであり、これらは後のセクションで説明します。
7.3.3. Pod のボリュームとボリュームマウントのリスト表示
Pod または Pod テンプレートのボリュームおよびボリュームマウントをリスト表示することができます。
手順
ボリュームをリスト表示するには、以下の手順を実行します。
$ oc set volume <object_type>/<name> [options]ボリュームのサポートされているオプションをリスト表示します。
| オプション | 説明 | デフォルト |
|---|---|---|
|
| ボリュームの名前。 | |
|
|
名前でコンテナーを選択します。すべての文字に一致するワイルドカード |
|
以下に例を示します。
Pod p1 のすべてのボリュームをリスト表示するには、以下を実行します。
$ oc set volume pod/p1すべてのデプロイメント設定で定義されるボリューム v1 をリスト表示するには、以下の手順を実行します。
$ oc set volume dc --all --name=v1
7.3.4. Pod へのボリュームの追加
Pod にボリュームとボリュームマウントを追加することができます。
手順
ボリューム、ボリュームマウントまたはそれらの両方を Pod テンプレートに追加するには、以下を実行します。
$ oc set volume <object_type>/<name> --add [options]| オプション | 説明 | デフォルト |
|---|---|---|
|
| ボリュームの名前。 | 指定がない場合は、自動的に生成されます。 |
|
|
ボリュームソースの名前。サポートされる値は |
|
|
|
名前でコンテナーを選択します。すべての文字に一致するワイルドカード |
|
|
|
選択されたコンテナー内のマウントパス。コンテナーのルート ( | |
|
|
ホストパス。 | |
|
|
シークレットの名前。 | |
|
|
configmap の名前。 | |
|
|
永続ボリューム要求の名前。 | |
|
|
JSON 文字列としてのボリュームソースの詳細。必要なボリュームソースが | |
|
|
サーバー上で更新せずに変更したオブジェクトを表示します。サポートされる値は | |
|
| 指定されたバージョンで変更されたオブジェクトを出力します。 |
|
以下に例を示します。
新規ボリュームソース emptyDir を registry
DeploymentConfigオブジェクトに追加するには、以下を実行します。$ oc set volume dc/registry --addヒントあるいは、以下の YAML を適用してボリュームを追加できます。
例7.1 ボリュームを追加したデプロイメント設定の例
kind: DeploymentConfig apiVersion: apps.openshift.io/v1 metadata: name: registry namespace: registry spec: replicas: 3 selector: app: httpd template: metadata: labels: app: httpd spec: volumes:1 - name: volume-pppsw emptyDir: {} containers: - name: httpd image: >- image-registry.openshift-image-registry.svc:5000/openshift/httpd:latest ports: - containerPort: 8080 protocol: TCP- 1
- ボリュームソース emptyDir を追加します。
レプリケーションコントローラー r1 のシークレット secret1 を使用してボリューム v1 を追加し、コンテナー内の /data でマウントするには、以下を実行します。
$ oc set volume rc/r1 --add --name=v1 --type=secret --secret-name='secret1' --mount-path=/dataヒントあるいは、以下の YAML を適用してボリュームを追加できます。
例7.2 ボリュームおよびシークレットを追加したレプリケーションコントローラーの例
kind: ReplicationController apiVersion: v1 metadata: name: example-1 namespace: example spec: replicas: 0 selector: app: httpd deployment: example-1 deploymentconfig: example template: metadata: creationTimestamp: null labels: app: httpd deployment: example-1 deploymentconfig: example spec: volumes:1 - name: v1 secret: secretName: secret1 defaultMode: 420 containers: - name: httpd image: >- image-registry.openshift-image-registry.svc:5000/openshift/httpd:latest volumeMounts:2 - name: v1 mountPath: /data要求名 pvc1 を使用して既存の永続ボリューム v1 をディスク上のデプロイメント設定 dc.json に追加し、ボリュームをコンテナー c1 の /data にマウントし、サーバー上で
DeploymentConfigオブジェクトを更新します。$ oc set volume -f dc.json --add --name=v1 --type=persistentVolumeClaim \ --claim-name=pvc1 --mount-path=/data --containers=c1ヒントあるいは、以下の YAML を適用してボリュームを追加できます。
例7.3 永続ボリュームが追加されたデプロイメント設定の例
kind: DeploymentConfig apiVersion: apps.openshift.io/v1 metadata: name: example namespace: example spec: replicas: 3 selector: app: httpd template: metadata: labels: app: httpd spec: volumes: - name: volume-pppsw emptyDir: {} - name: v11 persistentVolumeClaim: claimName: pvc1 containers: - name: httpd image: >- image-registry.openshift-image-registry.svc:5000/openshift/httpd:latest ports: - containerPort: 8080 protocol: TCP volumeMounts:2 - name: v1 mountPath: /dataすべてのレプリケーションコントローラー向けにリビジョン 5125c45f9f563 を使い、Git リポジトリー https://github.com/namespace1/project1 に基づいてボリューム v1 を追加するには、以下の手順を実行します。
$ oc set volume rc --all --add --name=v1 \ --source='{"gitRepo": { "repository": "https://github.com/namespace1/project1", "revision": "5125c45f9f563" }}'
7.3.5. Pod 内のボリュームとボリュームマウントの更新
Pod 内のボリュームとボリュームマウントを変更することができます。
手順
--overwrite オプションを使用して、既存のボリュームを更新します。
$ oc set volume <object_type>/<name> --add --overwrite [options]以下に例を示します。
レプリケーションコントローラー r1 の既存ボリューム v1 を既存の永続ボリューム要求 pvc1 に置き換えるには、以下の手順を実行します。
$ oc set volume rc/r1 --add --overwrite --name=v1 --type=persistentVolumeClaim --claim-name=pvc1ヒントまたは、以下の YAML を適用してボリュームを置き換えることもできます。
例7.4
pvc1という名前の永続ボリューム要求を持つレプリケーションコントローラーの例kind: ReplicationController apiVersion: v1 metadata: name: example-1 namespace: example spec: replicas: 0 selector: app: httpd deployment: example-1 deploymentconfig: example template: metadata: labels: app: httpd deployment: example-1 deploymentconfig: example spec: volumes: - name: v11 persistentVolumeClaim: claimName: pvc1 containers: - name: httpd image: >- image-registry.openshift-image-registry.svc:5000/openshift/httpd:latest ports: - containerPort: 8080 protocol: TCP volumeMounts: - name: v1 mountPath: /data- 1
- 永続ボリューム要求を
pvc1に設定します。
DeploymentConfigオブジェクトの d1 のマウントポイントを、ボリューム v1 の /opt に変更するには、以下を実行します。$ oc set volume dc/d1 --add --overwrite --name=v1 --mount-path=/optヒントまたは、以下の YAML を適用してマウントポイントを変更できます。
例7.5 マウントポイントが
optに設定されたデプロイメント設定の例kind: DeploymentConfig apiVersion: apps.openshift.io/v1 metadata: name: example namespace: example spec: replicas: 3 selector: app: httpd template: metadata: labels: app: httpd spec: volumes: - name: volume-pppsw emptyDir: {} - name: v2 persistentVolumeClaim: claimName: pvc1 - name: v1 persistentVolumeClaim: claimName: pvc1 containers: - name: httpd image: >- image-registry.openshift-image-registry.svc:5000/openshift/httpd:latest ports: - containerPort: 8080 protocol: TCP volumeMounts:1 - name: v1 mountPath: /opt- 1
- マウントポイントを
/optに設定します。
7.3.6. Pod からのボリュームおよびボリュームマウントの削除
Pod からボリュームまたはボリュームマウントを削除することができます。
手順
Pod テンプレートからボリュームを削除するには、以下を実行します。
$ oc set volume <object_type>/<name> --remove [options]| オプション | 説明 | デフォルト |
|---|---|---|
|
| ボリュームの名前。 | |
|
|
名前でコンテナーを選択します。すべての文字に一致するワイルドカード |
|
|
| 複数のボリュームを 1 度に削除することを示します。 | |
|
|
サーバー上で更新せずに変更したオブジェクトを表示します。サポートされる値は | |
|
| 指定されたバージョンで変更されたオブジェクトを出力します。 |
|
以下に例を示します。
DeploymentConfigオブジェクトの d1 からボリューム v1 を削除するには、以下を実行します。$ oc set volume dc/d1 --remove --name=v1DeploymentConfigオブジェクトの d1 の c1 のコンテナーからボリューム v1 をアンマウントし、d1 のコンテナーで参照されていない場合にボリューム v1 を削除するには、以下の手順を実行します。$ oc set volume dc/d1 --remove --name=v1 --containers=c1レプリケーションコントローラー r1 のすべてのボリュームを削除するには、以下の手順を実行します。
$ oc set volume rc/r1 --remove --confirm
7.3.7. Pod 内での複数の用途のためのボリュームの設定
ボリュームを、単一 Pod で複数の使用目的のためにボリュームを共有するように設定できます。この場合、volumeMounts.subPath プロパティーを使用し、ボリュームのルートの代わりにボリューム内に subPath 値を指定します。
既存のスケジュールされた Pod に subPath パラメーターを追加することはできません。
手順
ボリューム内のファイルのリストを表示するには、
oc rshコマンドを実行します。$ oc rsh <pod>出力例
sh-4.2$ ls /path/to/volume/subpath/mount example_file1 example_file2 example_file3subPathを指定します。subPathパラメーターを含むPod仕様の例apiVersion: v1 kind: Pod metadata: name: my-site spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: mysql image: mysql volumeMounts: - mountPath: /var/lib/mysql name: site-data subPath: mysql1 securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] - name: php image: php volumeMounts: - mountPath: /var/www/html name: site-data subPath: html2 securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] volumes: - name: site-data persistentVolumeClaim: claimName: my-site-data
7.4. projected ボリュームによるボリュームのマッピング
projected ボリューム は、いくつかの既存のボリュームソースを同じディレクトリーにマップします。
以下のタイプのボリュームソースをデプロイメントできます。
- シークレット
- Config Map
- Downward API
すべてのソースは Pod と同じ namespace に置かれる必要があります。
7.4.1. projected ボリュームについて
projected ボリュームはこれらのボリュームソースの任意の組み合わせを単一ディレクトリーにマップし、ユーザーの以下の実行を可能にします。
- 単一ボリュームを、複数のシークレットのキー、設定マップ、および Downward API 情報で自動的に設定し、各種の情報ソースで単一ディレクトリーを合成できるようにします。
- 各項目のパスを明示的に指定して、単一ボリュームを複数シークレットのキー、設定マップ、および Downward API 情報で設定し、ユーザーがボリュームの内容を完全に制御できるようにします。
RunAsUser パーミッションが Linux ベースの Pod のセキュリティーコンテキストに設定されている場合、projected ファイルには、コンテナーユーザー所有権を含む適切なパーミッションが設定されます。ただし、Windows の同等の RunAsUsername パーミッションが Windows Pod に設定されている場合、kubelet は Projected ボリュームのファイルに正しい所有権を設定できません。
そのため、Windows Pod のセキュリティーコンテキストに設定された RunAsUsername パーミッションは、Red Hat OpenShift Service on AWS で実行される Windows の Projected ボリュームには適用されません。
以下の一般的なシナリオは、Projected ボリュームを使用する方法を示しています。
- 設定マップ、シークレット、Downward API
-
projected ボリュームを使用すると、パスワードが含まれる設定データでコンテナーをデプロイできます。これらのリソースを使用するアプリケーションは、Red Hat OpenStack Platform (RHOSP) を Kubernetes にデプロイしている可能性があります。設定データは、サービスが実稼働用またはテストで使用されるかによって異なった方法でアセンブルされる必要がある可能性があります。Pod に実稼働またはテストのラベルが付けられている場合、Downward API セレクター
metadata.labelsを使用して適切な RHOSP 設定を生成できます。 - 設定マップ + シークレット
- projected ボリュームにより、設定データおよびパスワードを使用してコンテナーをデプロイできます。たとえば、設定マップを、Vault パスワードファイルを使用して暗号解除する暗号化された機密タスクで実行する場合があります。
- ConfigMap + Downward API.
-
projected ボリュームにより、Pod 名 (
metadata.nameセレクターで選択可能) を含む設定を生成できます。このアプリケーションは IP トラッキングを使用せずに簡単にソースを判別できるよう要求と共に Pod 名を渡すことができます。 - シークレット + Downward API
-
projected ボリュームにより、Pod の namespace (
metadata.namespaceセレクターで選択可能) を暗号化するためのパブリックキーとしてシークレットを使用できます。この例では、Operator はこのアプリケーションを使用し、暗号化されたトランスポートを使用せずに namespace 情報をセキュアに送信できるようになります。
7.4.1.1. Pod 仕様の例
以下は、projected ボリュームを作成するための Pod 仕様の例です。
シークレット、Downward API および設定マップを含む Pod
apiVersion: v1
kind: Pod
metadata:
name: volume-test
spec:
securityContext:
runAsNonRoot: true
seccompProfile:
type: RuntimeDefault
containers:
- name: container-test
image: busybox
volumeMounts:
- name: all-in-one
mountPath: "/projected-volume"
readOnly: true
securityContext:
allowPrivilegeEscalation: false
capabilities:
drop: [ALL]
volumes:
- name: all-in-one
projected:
defaultMode: 0400
sources:
- secret:
name: mysecret
items:
- key: username
path: my-group/my-username
- downwardAPI:
items:
- path: "labels"
fieldRef:
fieldPath: metadata.labels
- path: "cpu_limit"
resourceFieldRef:
containerName: container-test
resource: limits.cpu
- configMap:
name: myconfigmap
items:
- key: config
path: my-group/my-config
mode: 0777 - 1
- シークレットを必要とする各コンテナーの
volumeMountsセクションを追加します。 - 2
- シークレットが表示される未使用ディレクトリーのパスを指定します。
- 3
readOnlyをtrueに設定します。- 4
- それぞれの projected ボリュームソースをリスト表示するために
volumesブロックを追加します。 - 5
- ボリュームの名前を指定します。
- 6
- ファイルに実行パーミッションを設定します。
- 7
- シークレットを追加します。シークレットオブジェクトの名前を追加します。使用する必要のあるそれぞれのシークレットはリスト表示される必要があります。
- 8
mountPathの下にシークレットへのパスを指定します。ここで、シークレットファイルは /projected-volume/my-group/my-username になります。- 9
- Downward API ソースを追加します。
- 10
- ConfigMap ソースを追加します。
- 11
- 特定のデプロイメントにおけるモードを設定します。
Pod に複数のコンテナーがある場合、それぞれのコンテナーには volumeMounts セクションが必要ですが、1 つの volumes セクションのみが必要になります。
デフォルト以外のパーミッションモデルが設定された複数シークレットを含む Pod
apiVersion: v1
kind: Pod
metadata:
name: volume-test
spec:
securityContext:
runAsNonRoot: true
seccompProfile:
type: RuntimeDefault
containers:
- name: container-test
image: busybox
volumeMounts:
- name: all-in-one
mountPath: "/projected-volume"
readOnly: true
securityContext:
allowPrivilegeEscalation: false
capabilities:
drop: [ALL]
volumes:
- name: all-in-one
projected:
defaultMode: 0755
sources:
- secret:
name: mysecret
items:
- key: username
path: my-group/my-username
- secret:
name: mysecret2
items:
- key: password
path: my-group/my-password
mode: 511
defaultMode は、各ボリュームソースではなく、projected ボリュームのレベルでのみ指定できます。ただし、上記のように、個々の投影ごとに mode を明示的に設定することは可能です。
7.4.1.2. パスに関する留意事項
- 設定されるパスが同一である場合のキー間の競合
複数のキーを同じパスで設定する場合、Pod 仕様は有効な仕様として受け入れられません。以下の例では、
mysecretおよびmyconfigmapに指定されるパスは同じです。apiVersion: v1 kind: Pod metadata: name: volume-test spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: container-test image: busybox volumeMounts: - name: all-in-one mountPath: "/projected-volume" readOnly: true securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] volumes: - name: all-in-one projected: sources: - secret: name: mysecret items: - key: username path: my-group/data - configMap: name: myconfigmap items: - key: config path: my-group/data
ボリュームファイルのパスに関連する以下の状況を検討しましょう。
- 設定されたパスのないキー間の競合
- 上記のシナリオの場合と同様に、実行時の検証が実行される唯一のタイミングはすべてのパスが Pod の作成時に認識される時です。それ以外の場合は、競合の発生時に指定された最新のリソースがこれより前のすべてのものをオーバーライドします (これは Pod 作成後に更新されるリソースでも同様です)。
- 一方のパスが明示的に指定され、もう一方のパスが自動的に投影される場合の競合
- ユーザーが指定したパスが、自動的に投影されるデータのパスと一致して競合が発生した場合、前述のように、後から処理されるリソースが先行するリソースをオーバーライドします。
7.4.2. Pod の projected ボリュームの設定
projected ボリュームを作成する場合は、projected ボリュームについて で説明されているボリュームファイルパスの状態を考慮します。
以下の例では、projected ボリュームを使用して、既存のシークレットボリュームソースをマウントする方法が示されています。以下の手順は、ローカルファイルからユーザー名およびパスワードのシークレットを作成するために実行できます。その後に、シークレットを同じ共有ディレクトリーにマウントするために projected ボリュームを使用して 1 つのコンテナーを実行する Pod を作成します。
このユーザー名とパスワードの値には、base64 でエンコードされた任意の有効な文字列を使用できます。
以下の例は、base64 の admin を示しています。
$ echo -n "admin" | base64出力例
YWRtaW4=
以下の例は、base64 のパスワード 1f2d1e2e67df を示しています。
$ echo -n "1f2d1e2e67df" | base64出力例
MWYyZDFlMmU2N2Rm手順
既存のシークレットボリュームソースをマウントするために projected ボリュームを使用するには、以下を実行します。
シークレットを作成します。
次のような YAML ファイルを作成し、パスワードとユーザー情報を適切に置き換えます。
apiVersion: v1 kind: Secret metadata: name: mysecret type: Opaque data: pass: MWYyZDFlMmU2N2Rm user: YWRtaW4=以下のコマンドを使用してシークレットを作成します。
$ oc create -f <secrets-filename>以下に例を示します。
$ oc create -f secret.yaml出力例
secret "mysecret" createdシークレットが以下のコマンドを使用して作成されていることを確認できます。
$ oc get secret <secret-name>以下に例を示します。
$ oc get secret mysecret出力例
NAME TYPE DATA AGE mysecret Opaque 2 17h$ oc get secret <secret-name> -o yaml以下に例を示します。
$ oc get secret mysecret -o yamlapiVersion: v1 data: pass: MWYyZDFlMmU2N2Rm user: YWRtaW4= kind: Secret metadata: creationTimestamp: 2017-05-30T20:21:38Z name: mysecret namespace: default resourceVersion: "2107" selfLink: /api/v1/namespaces/default/secrets/mysecret uid: 959e0424-4575-11e7-9f97-fa163e4bd54c type: Opaque
projected ボリュームを持つ Pod を作成します。
volumesセクションを含む、次のような YAML ファイルを作成します。kind: Pod metadata: name: test-projected-volume spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: test-projected-volume image: busybox args: - sleep - "86400" volumeMounts: - name: all-in-one mountPath: "/projected-volume" readOnly: true securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] volumes: - name: all-in-one projected: sources: - secret: name: mysecret1 - 1
- 作成されたシークレットの名前。
設定ファイルから Pod を作成します。
$ oc create -f <your_yaml_file>.yaml以下に例を示します。
$ oc create -f secret-pod.yaml出力例
pod "test-projected-volume" created
Pod コンテナーが実行中であることを確認してから、Pod への変更を確認します。
$ oc get pod <name>以下に例を示します。
$ oc get pod test-projected-volume出力は以下のようになります。
出力例
NAME READY STATUS RESTARTS AGE test-projected-volume 1/1 Running 0 14s別のターミナルで、
oc execコマンドを使用し、実行中のコンテナーに対してシェルを開きます。$ oc exec -it <pod> <command>以下に例を示します。
$ oc exec -it test-projected-volume -- /bin/shシェルで、
projected-volumesディレクトリーに投影されたソースが含まれていることを確認します。/ # ls出力例
bin home root tmp dev proc run usr etc projected-volume sys var
7.5. コンテナーによる API オブジェクト使用の許可
Downward API は、コンテナーが Red Hat OpenShift Service on AWS に接続せずに API オブジェクトに関する情報を利用できるようにするメカニズムです。この情報には、Pod の名前、namespace およびリソース値が含まれます。コンテナーは、環境変数やボリュームプラグインを使用して Downward API からの情報を使用できます。
7.5.1. Downward API の使用によるコンテナーへの Pod 情報の公開
Downward API には、Pod の名前、プロジェクト、リソースの値などの情報が含まれます。コンテナーは、環境変数やボリュームプラグインを使用して Downward API からの情報を使用できます。
Pod 内のフィールドは、FieldRef API タイプを使用して選択されます。FieldRef には 2 つのフィールドがあります。
| フィールド | 説明 |
|---|---|
|
| Pod に関連して選択するフィールドのパスです。 |
|
|
|
現時点で v1 API の有効なセレクターには以下が含まれます。
| セレクター | 説明 |
|---|---|
|
| Pod の名前です。これは環境変数およびボリュームでサポートされています。 |
|
| Pod の namespace です。これは環境変数およびボリュームでサポートされています。 |
|
| Pod のラベルです。これはボリュームでのみサポートされ、環境変数ではサポートされていません。 |
|
| Pod のアノテーションです。これはボリュームでのみサポートされ、環境変数ではサポートされていません。 |
|
| Pod の IP です。これは環境変数でのみサポートされ、ボリュームではサポートされていません。 |
apiVersion フィールドは、指定されていない場合は、対象の Pod テンプレートの API バージョンにデフォルト設定されます。
7.5.2. Downward API を使用してコンテナーの値を使用する方法について
コンテナーは、環境変数やボリュームプラグインを使用して API の値を使用することができます。選択する方法により、コンテナーは以下を使用できます。
- Pod の名前
- Pod プロジェクト/namespace
- Pod のアノテーション
- Pod のラベル
アノテーションとラベルは、ボリュームプラグインのみを使用して利用できます。
7.5.2.1. 環境変数の使用によるコンテナー値の使用
コンテナーの環境変数を設定する際に、EnvVar タイプの valueFrom フィールド (タイプは EnvVarSource) を使用して、変数の値が value フィールドで指定されるリテラル値ではなく、FieldRef ソースからの値になるように指定します。
この方法で使用できるのは Pod の定数属性のみです。変数の値の変更についてプロセスに通知する方法でプロセスを起動すると、環境変数を更新できなくなるためです。環境変数を使用してサポートされるフィールドには、以下が含まれます。
- Pod の名前
- Pod プロジェクト/namespace
手順
コンテナーで使用する環境変数を含む新しい Pod 仕様を作成します。
次のような
pod.yamlファイルを作成します。apiVersion: v1 kind: Pod metadata: name: dapi-env-test-pod spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: env-test-container image: gcr.io/google_containers/busybox command: [ "/bin/sh", "-c", "env" ] env: - name: MY_POD_NAME valueFrom: fieldRef: fieldPath: metadata.name - name: MY_POD_NAMESPACE valueFrom: fieldRef: fieldPath: metadata.namespace securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] restartPolicy: Never # ...pod.yamlファイルから Pod を作成します。$ oc create -f pod.yaml
検証
コンテナーのログで
MY_POD_NAMEおよびMY_POD_NAMESPACEの値を確認します。$ oc logs -p dapi-env-test-pod
7.5.2.2. ボリュームプラグインを使用したコンテナー値の使用
コンテナーは、ボリュームプラグイン使用して API 値を使用できます。
コンテナーは、以下を使用できます。
- Pod の名前
- Pod プロジェクト/namespace
- Pod のアノテーション
- Pod のラベル
手順
ボリュームプラグインを使用するには、以下の手順を実行します。
コンテナーで使用する環境変数を含む新しい Pod 仕様を作成します。
次のような
volume-pod.yamlファイルを作成します。kind: Pod apiVersion: v1 metadata: labels: zone: us-east-coast cluster: downward-api-test-cluster1 rack: rack-123 name: dapi-volume-test-pod annotations: annotation1: "345" annotation2: "456" spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: volume-test-container image: gcr.io/google_containers/busybox command: ["sh", "-c", "cat /tmp/etc/pod_labels /tmp/etc/pod_annotations"] volumeMounts: - name: podinfo mountPath: /tmp/etc readOnly: false securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] volumes: - name: podinfo downwardAPI: defaultMode: 420 items: - fieldRef: fieldPath: metadata.name path: pod_name - fieldRef: fieldPath: metadata.namespace path: pod_namespace - fieldRef: fieldPath: metadata.labels path: pod_labels - fieldRef: fieldPath: metadata.annotations path: pod_annotations restartPolicy: Never # ...volume-pod.yamlファイルから Pod を作成します。$ oc create -f volume-pod.yaml
検証
コンテナーのログを確認し、設定されたフィールドの有無を確認します。
$ oc logs -p dapi-volume-test-pod出力例
cluster=downward-api-test-cluster1 rack=rack-123 zone=us-east-coast annotation1=345 annotation2=456 kubernetes.io/config.source=api
7.5.3. Downward API を使用してコンテナーリソースを使用する方法について
Pod の作成時に、Downward API を使用してコンピューティングリソースの要求および制限に関する情報を注入し、イメージおよびアプリケーションの作成者が特定の環境用のイメージを適切に作成できるようにします。
環境変数またはボリュームプラグインを使用してこれを実行できます。
7.5.3.1. 環境変数を使用したコンテナーリソースの使用
Pod を作成するときは、Downward API を使用し、環境変数を使用してコンピューティングリソースの要求と制限に関する情報を注入できます。
Pod 設定の作成時に、spec.container フィールド内の resources フィールドの内容に対応する環境変数を指定します。
リソース制限がコンテナー設定に含まれていない場合、Downward API はデフォルトでノードの CPU およびメモリーの割り当て可能な値に設定されます。
手順
注入するリソースを含む新しい Pod 仕様を作成します。
次のような
pod.yamlファイルを作成します。apiVersion: v1 kind: Pod metadata: name: dapi-env-test-pod spec: containers: - name: test-container image: gcr.io/google_containers/busybox:1.24 command: [ "/bin/sh", "-c", "env" ] resources: requests: memory: "32Mi" cpu: "125m" limits: memory: "64Mi" cpu: "250m" env: - name: MY_CPU_REQUEST valueFrom: resourceFieldRef: resource: requests.cpu - name: MY_CPU_LIMIT valueFrom: resourceFieldRef: resource: limits.cpu - name: MY_MEM_REQUEST valueFrom: resourceFieldRef: resource: requests.memory - name: MY_MEM_LIMIT valueFrom: resourceFieldRef: resource: limits.memory # ...pod.yamlファイルから Pod を作成します。$ oc create -f pod.yaml
7.5.3.2. ボリュームプラグインを使用したコンテナーリソースの使用
Pod を作成するときは、Downward API を使用し、ボリュームプラグインを使用してコンピューティングリソースの要求と制限に関する情報を注入できます。
Pod 設定の作成時に、spec.volumes.downwardAPI.items フィールドを使用して spec.resources フィールドに対応する必要なリソースを記述します。
リソース制限がコンテナー設定に含まれていない場合、Downward API はデフォルトでノードの CPU およびメモリーの割り当て可能な値に設定されます。
手順
注入するリソースを含む新しい Pod 仕様を作成します。
次のような
pod.yamlファイルを作成します。apiVersion: v1 kind: Pod metadata: name: dapi-env-test-pod spec: containers: - name: client-container image: gcr.io/google_containers/busybox:1.24 command: ["sh", "-c", "while true; do echo; if [[ -e /etc/cpu_limit ]]; then cat /etc/cpu_limit; fi; if [[ -e /etc/cpu_request ]]; then cat /etc/cpu_request; fi; if [[ -e /etc/mem_limit ]]; then cat /etc/mem_limit; fi; if [[ -e /etc/mem_request ]]; then cat /etc/mem_request; fi; sleep 5; done"] resources: requests: memory: "32Mi" cpu: "125m" limits: memory: "64Mi" cpu: "250m" volumeMounts: - name: podinfo mountPath: /etc readOnly: false volumes: - name: podinfo downwardAPI: items: - path: "cpu_limit" resourceFieldRef: containerName: client-container resource: limits.cpu - path: "cpu_request" resourceFieldRef: containerName: client-container resource: requests.cpu - path: "mem_limit" resourceFieldRef: containerName: client-container resource: limits.memory - path: "mem_request" resourceFieldRef: containerName: client-container resource: requests.memory # ...volume-pod.yamlファイルから Pod を作成します。$ oc create -f volume-pod.yaml
7.5.4. Downward API を使用したシークレットの使用
Pod の作成時に、Downward API を使用してシークレットを注入し、イメージおよびアプリケーションの作成者が特定の環境用のイメージを作成できるようにできます。
手順
注入するシークレットを作成します。
次のような
secret.yamlファイルを作成します。apiVersion: v1 kind: Secret metadata: name: mysecret data: password: <password> username: <username> type: kubernetes.io/basic-authsecret.yamlファイルからシークレットオブジェクトを作成します。$ oc create -f secret.yaml
上記の
Secretオブジェクトからusernameフィールドを参照する Pod を作成します。次のような
pod.yamlファイルを作成します。apiVersion: v1 kind: Pod metadata: name: dapi-env-test-pod spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: env-test-container image: gcr.io/google_containers/busybox command: [ "/bin/sh", "-c", "env" ] env: - name: MY_SECRET_USERNAME valueFrom: secretKeyRef: name: mysecret key: username securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] restartPolicy: Never # ...pod.yamlファイルから Pod を作成します。$ oc create -f pod.yaml
検証
コンテナーのログで
MY_SECRET_USERNAMEの値を確認します。$ oc logs -p dapi-env-test-pod
7.5.5. Downward API を使用した設定マップの使用
Pod の作成時に、Downward API を使用して config map の値を注入し、イメージおよびアプリケーションの作成者が特定の環境用のイメージを作成することができるようにすることができます。
手順
注入する値を含む config map を作成します。
次のような
configmap.yamlファイルを作成します。apiVersion: v1 kind: ConfigMap metadata: name: myconfigmap data: mykey: myvalueconfigmap.yamlファイルから config map を作成します。$ oc create -f configmap.yaml
上記の config map を参照する Pod を作成します。
次のような
pod.yamlファイルを作成します。apiVersion: v1 kind: Pod metadata: name: dapi-env-test-pod spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: env-test-container image: gcr.io/google_containers/busybox command: [ "/bin/sh", "-c", "env" ] env: - name: MY_CONFIGMAP_VALUE valueFrom: configMapKeyRef: name: myconfigmap key: mykey securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] restartPolicy: Always # ...pod.yamlファイルから Pod を作成します。$ oc create -f pod.yaml
検証
コンテナーのログで
MY_CONFIGMAP_VALUEの値を確認します。$ oc logs -p dapi-env-test-pod
7.5.6. 環境変数の参照
Pod の作成時に、$() 構文を使用して事前に定義された環境変数の値を参照できます。環境変数の参照が解決されない場合、値は提供された文字列のままになります。
手順
既存の環境変数を参照する Pod を作成します。
次のような
pod.yamlファイルを作成します。apiVersion: v1 kind: Pod metadata: name: dapi-env-test-pod spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: env-test-container image: gcr.io/google_containers/busybox command: [ "/bin/sh", "-c", "env" ] env: - name: MY_EXISTING_ENV value: my_value - name: MY_ENV_VAR_REF_ENV value: $(MY_EXISTING_ENV) securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] restartPolicy: Never # ...pod.yamlファイルから Pod を作成します。$ oc create -f pod.yaml
検証
コンテナーのログで
MY_ENV_VAR_REF_ENV値を確認します。$ oc logs -p dapi-env-test-pod
7.5.7. 環境変数の参照のエスケープ
Pod の作成時に、二重ドル記号を使用して環境変数の参照をエスケープできます。次に値は指定された値の単一ドル記号のバージョンに設定されます。
手順
既存の環境変数を参照する Pod を作成します。
次のような
pod.yamlファイルを作成します。apiVersion: v1 kind: Pod metadata: name: dapi-env-test-pod spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: env-test-container image: gcr.io/google_containers/busybox command: [ "/bin/sh", "-c", "env" ] env: - name: MY_NEW_ENV value: $$(SOME_OTHER_ENV) securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL] restartPolicy: Never # ...pod.yamlファイルから Pod を作成します。$ oc create -f pod.yaml
検証
コンテナーのログで
MY_NEW_ENV値を確認します。$ oc logs -p dapi-env-test-pod
7.6. Red Hat OpenShift Service on AWS コンテナー間でのファイルのコピー
CLI を使用して、rsync コマンドでコンテナーのリモートディレクトリーにローカルファイルをコピーするか、そのディレクトリーからローカルファイルをコピーすることができます。
7.6.1. ファイルをコピーする方法について
oc rsync コマンドまたは remote sync は、バックアップと復元を実行するためにデータベースアーカイブを Pod にコピー、または Pod からコピーするのに役立つツールです。また、実行中の Pod がソースファイルのホットリロードをサポートする場合に、ソースコードの変更を開発のデバッグ目的で実行中の Pod にコピーするためにも、oc rsync を使用できます。
$ oc rsync <source> <destination> [-c <container>]7.6.1.1. 要件
- Copy Source の指定
oc rsyncコマンドのソース引数はローカルディレクトリーまた Pod ディレクトリーのいずれかを示す必要があります。個々のファイルはサポートされていません。Pod ディレクトリーを指定する場合、ディレクトリー名の前に Pod 名を付ける必要があります。
<pod name>:<dir>ディレクトリー名がパスセパレーター (
/) で終了する場合、ディレクトリーの内容のみが宛先にコピーされます。それ以外の場合は、ディレクトリーとその内容が宛先にコピーされます。- Copy Destination の指定
-
oc rsyncコマンドの宛先引数はディレクトリーを参照する必要があります。ディレクトリーが存在せず、rsyncがコピーに使用される場合、ディレクトリーが作成されます。 - 宛先でのファイルの削除
-
--deleteフラグは、ローカルディレクトリーにないリモートディレクトリーにあるファイルを削除するために使用できます。 - ファイル変更に関する継続的な同期
--watchオプションを使用すると、コマンドはソースパスでファイルシステムの変更をモニターし、変更が生じるとそれらを同期します。この引数を指定すると、コマンドは無期限に実行されます。同期は短い非表示期間の後に実行され、急速に変化するファイルシステムによって同期呼び出しが継続的に実行されないようにします。
--watchオプションを使用する場合、動作は通常oc rsyncに渡される引数の使用を含めoc rsyncを繰り返し手動で起動する場合と同様になります。そのため、--deleteなどのoc rsyncの手動の呼び出しで使用される同じフラグでこの動作を制御できます。
7.6.2. コンテナーへの/からのファイルのコピー
コンテナーへの/からのローカルファイルのコピーのサポートは CLI に組み込まれています。
前提条件
oc rsync を使用する場合は、以下の点に注意してください。
rsync がインストールされていること。
oc rsyncコマンドは、クライアントマシンおよびリモートコンテナー上に存在する場合は、ローカルのrsyncツールを使用。rsyncがローカルまたはリモートコンテナー内に見つからない場合、tar アーカイブがローカルに作成され、tar ユーティリティーを使用してファイルを展開するコンテナーに送信されます。リモートコンテナーで tar を利用できない場合は、コピーに失敗します。tar のコピー方法は
oc rsyncと同様に機能する訳ではありません。たとえば、oc rsyncは、宛先ディレクトリーが存在しない場合にはこれを作成し、ソースと宛先間の差分のファイルのみを送信します。注記Windows では、
cwRsyncクライアントがoc rsyncコマンドで使用するためにインストールされ、PATH に追加される必要があります。
手順
ローカルディレクトリーを Pod ディレクトリーにコピーするには、以下の手順を実行します。
$ oc rsync <local-dir> <pod-name>:/<remote-dir> -c <container-name>以下に例を示します。
$ oc rsync /home/user/source devpod1234:/src -c user-containerPod ディレクトリーをローカルディレクトリーにコピーするには、以下の手順を実行します。
$ oc rsync devpod1234:/src /home/user/source出力例
$ oc rsync devpod1234:/src/status.txt /home/user/
7.6.3. 高度な Rsync 機能の使用
oc rsync コマンドは、標準の rsync よりも利用可能なコマンドラインオプションが限られています。oc rsync で利用できない標準の rsync コマンドラインオプションを使用する必要がある場合 (例: --exclude-from=FILE オプション)、以下のように回避策として標準 rsync の --rsh (-e) オプション、または RSYNC_RSH 環境変数を使用できる場合があります。
$ rsync --rsh='oc rsh' --exclude-from=<file_name> <local-dir> <pod-name>:/<remote-dir>または
RSYNC_RSH 変数をエクスポートします。
$ export RSYNC_RSH='oc rsh'次に、rsync コマンドを実行します。
$ rsync --exclude-from=<file_name> <local-dir> <pod-name>:/<remote-dir>
上記の例のいずれも標準の rsync をリモートシェルプログラムとして oc rsh を使用するように設定してリモート Pod に接続できるようにします。これらは oc rsync を実行する代替方法となります。
7.7. Red Hat OpenShift Service on AWS コンテナーでのリモートコマンドの実行
CLI を使用して、Red Hat OpenShift Service on AWS コンテナーでリモートコマンドを実行できます。
7.7.1. コンテナーでのリモートコマンドの実行
リモートコンテナーコマンド実行のサポートは CLI に組み込まれています。
手順
コンテナーでコマンドを実行するには、以下の手順を実行します。
$ oc exec <pod> [-c <container>] -- <command> [<arg_1> ... <arg_n>]以下に例を示します。
$ oc exec mypod date出力例
Thu Apr 9 02:21:53 UTC 2015
セキュリティー保護の理由 により、oc exec コマンドは、コマンドが cluster-admin ユーザーによって実行されている場合を除き、特権付きコンテナーにアクセスしようとしても機能しません。
7.7.2. クライアントからのリモートコマンドを開始するためのプロトコル
クライアントは要求を Kubernetes API サーバーに対して実行してコンテナーのリモートコマンドの実行を開始します。
/proxy/nodes/<node_name>/exec/<namespace>/<pod>/<container>?command=<command>上記の URL には以下が含まれます。
-
<node_name>はノードの FQDN です。 -
<namespace>はターゲット Pod のプロジェクトです。 -
<pod>はターゲット Pod の名前です。 -
<container>はターゲットコンテナーの名前です。 -
<command>は実行される必要なコマンドです。
以下に例を示します。
/proxy/nodes/node123.openshift.com/exec/myns/mypod/mycontainer?command=dateさらに、クライアントはパラメーターを要求に追加して以下を指示します。
- クライアントはリモートクライアントのコマンドに入力を送信する (標準入力: stdin)。
- クライアントのターミナルは TTY である。
- リモートコンテナーのコマンドは標準出力 (stdout) からクライアントに出力を送信する。
- リモートコンテナーのコマンドは標準エラー出力 (stderr) からクライアントに出力を送信する。
exec 要求の API サーバーへの送信後、クライアントは多重化ストリームをサポートするものに接続をアップグレードします。現在の実装では HTTP/2 を使用しています。
クライアントは標準入力 (stdin)、標準出力 (stdout)、および標準エラー出力 (stderr) 用にそれぞれのストリームを作成します。ストリームを区別するために、クライアントはストリームの streamType ヘッダーを stdin、stdout、または stderr のいずれかに設定します。
リモートコマンド実行要求の処理が終了すると、クライアントはすべてのストリームやアップグレードされた接続および基礎となる接続を閉じます。
7.8. コンテナー内のアプリケーションにアクセスするためのポート転送の使用
Red Hat OpenShift Service on AWS は Pod へのポート転送をサポートしています。
7.8.1. ポート転送について
CLI を使用して 1 つ以上のローカルポートを Pod に転送できます。これにより、指定されたポートまたはランダムのポートでローカルにリッスンでき、Pod の所定ポートへ/からデータを転送できます。
ポート転送のサポートは、CLI に組み込まれています。
$ oc port-forward <pod> [<local_port>:]<remote_port> [...[<local_port_n>:]<remote_port_n>]CLI はユーザーによって指定されたそれぞれのローカルポートでリッスンし、以下で説明されているプロトコルで転送を実行します。
ポートは以下の形式を使用して指定できます。
|
| クライアントはポート 5000 でローカルにリッスンし、Pod の 5000 に転送します。 |
|
| クライアントはポート 6000 でローカルにリッスンし、Pod の 5000 に転送します。 |
|
| クライアントは空きのローカルポートを選択し、Pod の 5000 に転送します。 |
Red Hat OpenShift Service on AWS はクライアントからのポート転送要求を処理します。要求を受信すると、Red Hat OpenShift Service on AWS は応答をアップグレードし、クライアントがポート転送ストリームを作成するまで待機します。Red Hat OpenShift Service on AWS は新しいストリームを受信すると、ストリームと Pod のポートの間でデータをコピーします。
アーキテクチャーの観点では、Pod のポートに転送するためのいくつかのオプションがあります。サポートされている Red Hat OpenShift Service on AWS 実装は、ノードホストで nsenter を直接呼び出して Pod のネットワーク namespace に入ってから、socat を呼び出してストリームと Pod のポートの間でデータをコピーします。ただし、カスタムの実装には、nsenter および socat を実行する helper Pod の実行を含めることができ、その場合は、それらのバイナリーをホストにインストールする必要はありません。
7.8.2. ポート転送の使用
CLI を使用して、1 つ以上のローカルポートの Pod へのポート転送を実行できます。
手順
以下のコマンドを使用して、Pod 内の指定されたポートでリッスンします。
$ oc port-forward <pod> [<local_port>:]<remote_port> [...[<local_port_n>:]<remote_port_n>]以下に例を示します。
以下のコマンドを使用して、ポート
5000および6000でローカルにリッスンし、Pod のポート5000および6000との間でデータを転送します。$ oc port-forward <pod> 5000 6000出力例
Forwarding from 127.0.0.1:5000 -> 5000 Forwarding from [::1]:5000 -> 5000 Forwarding from 127.0.0.1:6000 -> 6000 Forwarding from [::1]:6000 -> 6000以下のコマンドを使用して、ポート
8888でローカルにリッスンし、Pod の5000に転送します。$ oc port-forward <pod> 8888:5000出力例
Forwarding from 127.0.0.1:8888 -> 5000 Forwarding from [::1]:8888 -> 5000以下のコマンドを使用して、空きポートでローカルにリッスンし、Pod の
5000に転送します。$ oc port-forward <pod> :5000出力例
Forwarding from 127.0.0.1:42390 -> 5000 Forwarding from [::1]:42390 -> 5000または、以下を実行します。
$ oc port-forward <pod> 0:5000
7.8.3. クライアントからのポート転送を開始するためのプロトコル
クライアントは Kubernetes API サーバーに対して要求を実行して Pod へのポート転送を実行します。
/proxy/nodes/<node_name>/portForward/<namespace>/<pod>上記の URL には以下が含まれます。
-
<node_name>はノードの FQDN です。 -
<namespace>はターゲット Pod の namespace です。 -
<pod>はターゲット Pod の名前です。
以下に例を示します。
/proxy/nodes/node123.openshift.com/portForward/myns/mypodポート転送要求を API サーバーに送信した後に、クライアントは多重化ストリームをサポートするものに接続をアップグレードします。現在の実装では Hyptertext Transfer Protocol Version 2 (HTTP/2) を使用しています。
クライアントは Pod のターゲットポートを含む port ヘッダーでストリームを作成します。ストリームに書き込まれるすべてのデータは kubelet 経由でターゲット Pod およびポートに送信されます。同様に、転送された接続で Pod から送信されるすべてのデータはクライアントの同じストリームに送信されます。
クライアントは、ポート転送要求が終了するとすべてのストリーム、アップグレードされた接続および基礎となる接続を閉じます。
第8章 クラスターの操作
8.1. Red Hat OpenShift Service on AWS クラスター内のシステムイベント情報の表示
Red Hat OpenShift Service on AWS のイベントは、Red Hat OpenShift Service on AWS クラスター内の API オブジェクトに発生するイベントに基づいてモデル化されます。
8.1.1. イベントについて
イベントにより、Red Hat OpenShift Service on AWS はリソースに依存しない方法で実際のイベントに関する情報を記録できます。また、開発者および管理者が統一された方法でシステムコンポーネントに関する情報を使用できるようにします。
8.1.2. CLI を使用したイベントの表示
CLI を使用し、特定のプロジェクト内のイベントのリストを取得できます。
手順
プロジェクト内のイベントを表示するには、以下のコマンドを使用します。
$ oc get events [-n <project>]1 - 1
- プロジェクトの名前。
以下に例を示します。
$ oc get events -n openshift-config出力例
LAST SEEN TYPE REASON OBJECT MESSAGE 97m Normal Scheduled pod/dapi-env-test-pod Successfully assigned openshift-config/dapi-env-test-pod to ip-10-0-171-202.ec2.internal 97m Normal Pulling pod/dapi-env-test-pod pulling image "gcr.io/google_containers/busybox" 97m Normal Pulled pod/dapi-env-test-pod Successfully pulled image "gcr.io/google_containers/busybox" 97m Normal Created pod/dapi-env-test-pod Created container 9m5s Warning FailedCreatePodSandBox pod/dapi-volume-test-pod Failed create pod sandbox: rpc error: code = Unknown desc = failed to create pod network sandbox k8s_dapi-volume-test-pod_openshift-config_6bc60c1f-452e-11e9-9140-0eec59c23068_0(748c7a40db3d08c07fb4f9eba774bd5effe5f0d5090a242432a73eee66ba9e22): Multus: Err adding pod to network "ovn-kubernetes": cannot set "ovn-kubernetes" ifname to "eth0": no netns: failed to Statfs "/proc/33366/ns/net": no such file or directory 8m31s Normal Scheduled pod/dapi-volume-test-pod Successfully assigned openshift-config/dapi-volume-test-pod to ip-10-0-171-202.ec2.internal #...Red Hat OpenShift Service on AWS コンソールからプロジェクト内のイベントを表示するには、以下を実行します。
- Red Hat OpenShift Service on AWS コンソールを起動します。
- Home → Events をクリックし、プロジェクトを選択します。
イベントを表示するリソースに移動します。たとえば、Home → Projects → <project-name> → <resource-name> の順に移動します。
Pod やデプロイメントなどの多くのオブジェクトには、独自の イベント タブもあります。それらのタブには、オブジェクトに関連するイベントが表示されます。
8.1.3. イベントのリスト
このセクションでは、Red Hat OpenShift Service on AWS のイベントを説明します。
| 名前 | 説明 |
|---|---|
|
| Pod 設定の検証に失敗しました。 |
| 名前 | 説明 |
|---|---|
|
| バックオフ (再起動) によりコンテナーが失敗しました。 |
|
| コンテナーが作成されました。 |
|
| プル/作成/起動が失敗しました。 |
|
| コンテナーを強制終了しています。 |
|
| コンテナーが起動しました。 |
|
| 他の Pod のプリエンプションを実行します。 |
|
| コンテナーランタイムは、指定の猶予期間以内に Pod を停止しませんでした。 |
| 名前 | 説明 |
|---|---|
|
| コンテナーが正常ではありません。 |
| 名前 | 説明 |
|---|---|
|
| バックオフ (コンテナー起動、イメージのプル)。 |
|
| イメージの NeverPull Policy の違反があります。 |
|
| イメージのプルに失敗しました。 |
|
| イメージの検査に失敗しました。 |
|
| イメージのプルに成功し、コンテナーイメージがマシンにすでに置かれています。 |
|
| イメージをプルしています。 |
| 名前 | 説明 |
|---|---|
|
| 空きディスク容量に関連する障害が発生しました。 |
|
| 無効なディスク容量です。 |
| 名前 | 説明 |
|---|---|
|
| ボリュームのマウントに失敗しました。 |
|
| ホストのネットワークがサポートされていません。 |
|
| ホスト/ポートの競合 |
|
| Kubelet のセットアップに失敗しました。 |
|
| シェイパーが定義されていません。 |
|
| ノードの準備ができていません。 |
|
| ノードがスケジュール可能ではありません。 |
|
| ノードの準備ができています。 |
|
| ノードがスケジュール可能です。 |
|
| ノードセレクターの不一致があります。 |
|
| ディスクの空き容量が不足しています。 |
|
| ノードが再起動しました。 |
|
| kubelet を起動しています。 |
|
| ボリュームの割り当てに失敗しました。 |
|
| ボリュームの割り当て解除に失敗しました。 |
|
| ボリュームの拡張/縮小に失敗しました。 |
|
| 正常にボリュームを拡張/縮小しました。 |
|
| ファイルシステムの拡張/縮小に失敗しました。 |
|
| 正常にファイルシステムが拡張/縮小されました。 |
|
| ボリュームのマウント解除に失敗しました。 |
|
| ボリュームのマッピングに失敗しました。 |
|
| デバイスのマッピング解除に失敗しました。 |
|
| ボリュームがすでにマウントされています。 |
|
| ボリュームの割り当てが正常に解除されました。 |
|
| ボリュームが正常にマウントされました。 |
|
| ボリュームのマウントが正常に解除されました。 |
|
| コンテナーのガベージコレクションに失敗しました。 |
|
| イメージのガベージコレクションに失敗しました。 |
|
| システム予約の Cgroup 制限の実施に失敗しました。 |
|
| システム予約の Cgroup 制限を有効にしました。 |
|
| マウントオプションが非対応です。 |
|
| Pod のサンドボックスが変更されました。 |
|
| Pod のサンドボックスの作成に失敗しました。 |
|
| Pod サンドボックスの状態取得に失敗しました。 |
| 名前 | 説明 |
|---|---|
|
| Pod の同期が失敗しました。 |
| 名前 | 説明 |
|---|---|
|
| クラスターに OOM (out of memory) 状態が発生しました。 |
| 名前 | 説明 |
|---|---|
|
| Pod の停止に失敗しました。 |
|
| Pod コンテナーの作成に失敗しました。 |
|
| Pod データディレクトリーの作成に失敗しました。 |
|
| ネットワークの準備ができていません。 |
|
|
作成エラー: |
|
|
作成された Pod: |
|
|
削除エラー: |
|
|
削除した Pod: |
| 名前 | 説明 |
|---|---|
| SelectorRequired | セレクターが必要です。 |
|
| セレクターを適切な内部セレクターオブジェクトに変換できませんでした。 |
|
| HPA はレプリカ数を計算できませんでした。 |
|
| 不明なメトリクスソースタイプです。 |
|
| HPA は正常にレプリカ数を計算できました。 |
|
| 指定の HPA への変換に失敗しました。 |
|
| HPA コントローラーは、ターゲットの現在のスケーリングを取得できませんでした。 |
|
| HPA コントローラーは、ターゲットの現在のスケールを取得できました。 |
|
| 表示されているメトリクスに基づく必要なレプリカ数の計算に失敗しました。 |
|
|
新しいサイズ: |
|
|
新しいサイズ: |
|
| 状況の更新に失敗しました。 |
| 名前 | 説明 |
|---|---|
|
| 利用可能な永続ボリュームがなく、ストレージクラスが設定されていません。 |
|
| ボリュームサイズまたはクラスが要求の内容と異なります。 |
|
| 再利用 Pod の作成エラー |
|
| ボリュームの再利用時に発生します。 |
|
| Pod の再利用時に発生します。 |
|
| ボリュームの削除時に発生します。 |
|
| ボリュームの削除時のエラー。 |
|
| 要求のボリュームが手動または外部ソフトウェアでプロビジョニングされる場合に発生します。 |
|
| ボリュームのプロビジョニングに失敗しました。 |
|
| プロビジョニングしたボリュームの消去エラー |
|
| ボリュームが正常にプロビジョニングされる場合に発生します。 |
|
| Pod のスケジューリングまでバインドが遅延します。 |
| 名前 | 説明 |
|---|---|
|
| ハンドラーが Pod の起動に失敗しました。 |
|
| ハンドラーが pre-stop に失敗しました。 |
|
| Pre-stop フックが完了しませんでした。 |
| 名前 | 説明 |
|---|---|
|
| デプロイメントのキャンセルに失敗しました。 |
|
| デプロイメントがキャンセルされました。 |
|
| 新規レプリケーションコントローラーが作成されました。 |
|
| サービスに割り当てる Ingress IP がありません。 |
| 名前 | 説明 |
|---|---|
|
|
Pod のスケジューリングに失敗: |
|
|
ノード |
|
|
|
| 名前 | 説明 |
|---|---|
|
| このデーモンセットは全 Pod を選択しています。空でないセレクターが必要です。 |
|
|
|
|
|
ノード |
| 名前 | 説明 |
|---|---|
|
| ロードバランサーの作成エラー |
|
| ロードバランサーを削除します。 |
|
| ロードバランサーを確保します。 |
|
| ロードバランサーを確保しました。 |
|
|
|
|
|
新規の |
|
|
新しい IP アドレスを表示します。例: |
|
|
外部 IP アドレスを表示します。例: |
|
|
新しい UID を表示します。例: |
|
|
新しい |
|
|
新しい |
|
| 新規ホストでロードバランサーを更新しました。 |
|
| 新規ホストでのロードバランサーの更新に失敗しました。 |
|
| ロードバランサーを削除します。 |
|
| ロードバランサーの削除エラー。 |
|
| ロードバランサーを削除しました。 |
8.2. Red Hat OpenShift Service on AWS のノードが保持できる Pod の数の見積り
クラスター管理者は、OpenShift Cluster Capacity Tool を使用して、現在のリソースが使い切られる前にそれらを増やすべくスケジュール可能な Pod 数を表示し、スケジュール可能な Pod 数を表示したり、Pod を今後スケジュールできるようにすることができます。この容量は、クラスター内の個別ノードからのものを集めたものであり、これには CPU、メモリー、ディスク領域などが含まれます。
8.2.1. OpenShift Cluster Capacity Tool について
OpenShift Cluster Capacity Tool は、より正確な見積もりを出すべく、スケジュールの一連の意思決定をシミュレーションし、リソースが使い切られる前にクラスターでスケジュールできる入力 Pod のインスタンス数を判別します。
ノード間に分散しているすべてのリソースがカウントされないため、残りの割り当て可能な容量は概算となります。残りのリソースのみが分析対象となり、クラスターでのスケジュール可能な所定要件を持つ Pod のインスタンス数という点から消費可能な容量を見積もります。
Pod のスケジューリングはその選択およびアフィニティー条件に基づいて特定のノードセットだけがサポートされる可能性があります。そのため、クラスターでスケジュール可能な残りの Pod 数を見積もることが困難になる場合があります。
OpenShift Cluster Capacity Tool は、コマンドラインからスタンドアロンのユーティリティーとして実行することも、Red Hat OpenShift Service on AWS クラスター内の Pod でジョブとして実行することもできます。これを Pod 内のジョブとしてツールを実行すると、介入なしに複数回実行することができます。
8.2.2. コマンドラインでの OpenShift Cluster Capacity Tool の実行
コマンドラインから OpenShift Cluster Capacity Tool を実行して、クラスターにスケジュール設定可能な Pod 数を見積ることができます。
ツールがリソース使用状況を見積もるために使用するサンプル Pod 仕様ファイルを作成します。pod spec はそのリソース要件を limits または requests として指定します。クラスター容量ツールは、Pod のリソース要件をその見積もりの分析に反映します。
前提条件
- OpenShift Cluster Capacity Tool を実行します。これは、Red Hat エコシステムカタログからコンテナーイメージとして入手できます。
サンプルの Pod 仕様ファイルを作成します。
以下のような YAML ファイルを作成します。
apiVersion: v1 kind: Pod metadata: name: small-pod labels: app: guestbook tier: frontend spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: php-redis image: gcr.io/google-samples/gb-frontend:v4 imagePullPolicy: Always resources: limits: cpu: 150m memory: 100Mi requests: cpu: 150m memory: 100Mi securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL]クラスターロールを作成します。
$ oc create -f <file_name>.yaml以下に例を示します。
$ oc create -f pod-spec.yaml
手順
コマンドラインでクラスター容量ツールを使用するには、次のようにします。
ターミナルから、Red Hat レジストリーにログインします。
$ podman login registry.redhat.ioクラスター容量ツールのイメージをプルします。
$ podman pull registry.redhat.io/openshift4/ose-cluster-capacityクラスター容量ツールを実行します。
$ podman run -v $HOME/.kube:/kube:Z -v $(pwd):/cc:Z ose-cluster-capacity \ /bin/cluster-capacity --kubeconfig /kube/config --<pod_spec>.yaml /cc/<pod_spec>.yaml \ --verboseここでは、以下のようになります。
- <pod_spec>.yaml
- 使用する Pod の仕様を指定します。
- verbose
- クラスター内の各ノードでスケジュールできる Pod の数の詳細な説明を出力します。
出力例
small-pod pod requirements: - CPU: 150m - Memory: 100Mi The cluster can schedule 88 instance(s) of the pod small-pod. Termination reason: Unschedulable: 0/5 nodes are available: 2 Insufficient cpu, 3 node(s) had taint {node-role.kubernetes.io/master: }, that the pod didn't tolerate. Pod distribution among nodes: small-pod - 192.168.124.214: 45 instance(s) - 192.168.124.120: 43 instance(s)上記の例では、クラスターにスケジュールできる推定 Pod の数は 88 です。
8.2.3. OpenShift Cluster Capacity Tool を Pod 内のジョブとして実行する
OpenShift Cluster Capacity Tool を Pod 内のジョブとして実行すると、ユーザーの介入を必要とせずにツールを複数回実行できます。OpenShift Cluster Capacity Tool は、ConfigMap オブジェクトを使用してジョブとして実行します。
前提条件
OpenShift Cluster Capacity Tool をダウンロードしてインストールします。
手順
クラスター容量ツールを実行するには、以下の手順を実行します。
クラスターロールを作成します。
以下のような YAML ファイルを作成します。
kind: ClusterRole apiVersion: rbac.authorization.k8s.io/v1 metadata: name: cluster-capacity-role rules: - apiGroups: [""] resources: ["pods", "nodes", "persistentvolumeclaims", "persistentvolumes", "services", "replicationcontrollers"] verbs: ["get", "watch", "list"] - apiGroups: ["apps"] resources: ["replicasets", "statefulsets"] verbs: ["get", "watch", "list"] - apiGroups: ["policy"] resources: ["poddisruptionbudgets"] verbs: ["get", "watch", "list"] - apiGroups: ["storage.k8s.io"] resources: ["storageclasses"] verbs: ["get", "watch", "list"]次のコマンドを実行して、クラスターのロールを作成します。
$ oc create -f <file_name>.yaml以下に例を示します。
$ oc create sa cluster-capacity-sa
サービスアカウントを作成します。
$ oc create sa cluster-capacity-sa -n defaultロールをサービスアカウントに追加します。
$ oc adm policy add-cluster-role-to-user cluster-capacity-role \ system:serviceaccount:<namespace>:cluster-capacity-saここでは、以下のようになります。
- <namespace>
- Pod が配置されている namespace を指定します。
Pod 仕様を定義して、作成します。
以下のような YAML ファイルを作成します。
apiVersion: v1 kind: Pod metadata: name: small-pod labels: app: guestbook tier: frontend spec: securityContext: runAsNonRoot: true seccompProfile: type: RuntimeDefault containers: - name: php-redis image: gcr.io/google-samples/gb-frontend:v4 imagePullPolicy: Always resources: limits: cpu: 150m memory: 100Mi requests: cpu: 150m memory: 100Mi securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL]以下のコマンドを実行して Pod を作成します。
$ oc create -f <file_name>.yaml以下に例を示します。
$ oc create -f pod.yaml
以下のコマンドを実行して config map オブジェクトを作成します。
$ oc create configmap cluster-capacity-configmap \ --from-file=pod.yaml=pod.yamlクラスター容量分析は、
cluster-capacity-configmapという名前の config map オブジェクトを使用してボリュームにマウントされ、入力 Pod 仕様ファイルpod.yamlはパス/test-podのボリュームtest-volumeにマウントされます。ジョブ仕様ファイルの以下のサンプルを使用して、ジョブを作成します。
以下のような YAML ファイルを作成します。
apiVersion: batch/v1 kind: Job metadata: name: cluster-capacity-job spec: parallelism: 1 completions: 1 template: metadata: name: cluster-capacity-pod spec: containers: - name: cluster-capacity image: openshift/origin-cluster-capacity imagePullPolicy: "Always" volumeMounts: - mountPath: /test-pod name: test-volume env: - name: CC_INCLUSTER1 value: "true" command: - "/bin/sh" - "-ec" - | /bin/cluster-capacity --podspec=/test-pod/pod.yaml --verbose restartPolicy: "Never" serviceAccountName: cluster-capacity-sa volumes: - name: test-volume configMap: name: cluster-capacity-configmap- 1
- クラスター容量ツールにクラスター内で Pod として実行されていることを認識させる環境変数です。
ConfigMapのpod.yamlキーはPod仕様ファイル名と同じですが、これは必須ではありません。これを実行することで、入力 Pod 仕様ファイルは/test-pod/pod.yamlとして Pod 内でアクセスできます。
次のコマンドを実行して、クラスター容量イメージを Pod 内のジョブとして実行します。
$ oc create -f cluster-capacity-job.yaml
検証
ジョブログを確認し、クラスター内でスケジュールできる Pod の数を確認します。
$ oc logs jobs/cluster-capacity-job出力例
small-pod pod requirements: - CPU: 150m - Memory: 100Mi The cluster can schedule 52 instance(s) of the pod small-pod. Termination reason: Unschedulable: No nodes are available that match all of the following predicates:: Insufficient cpu (2). Pod distribution among nodes: small-pod - 192.168.124.214: 26 instance(s) - 192.168.124.120: 26 instance(s)
8.3. 制限範囲によるリソース消費の制限
デフォルトで、コンテナーは Red Hat OpenShift Service on AWS クラスターのバインドされていないコンピュートリソースで実行されます。制限範囲は、プロジェクト内の特定オブジェクトのリソースの消費を制限できます。
- Pod およびコンテナー: Pod およびそれらのコンテナーの CPU およびメモリーの最小および最大要件を設定できます。
-
イメージストリーム:
ImageStreamオブジェクトのイメージおよびタグの数に制限を設定できます。 - イメージ: 内部レジストリーにプッシュできるイメージのサイズを制限することができます。
- 永続ボリューム要求 (PVC): 要求できる PVC のサイズを制限できます。
Pod が制限範囲で課される制約を満たさない場合、Pod を namespace に作成することはできません。
8.3.1. 制限範囲について
LimitRange オブジェクトで定義される制限範囲。プロジェクトのリソース消費を制限します。プロジェクトで、Pod、コンテナー、イメージ、イメージストリーム、または永続ボリューム要求 (PVC) の特定のリソース制限を設定できます。
すべてのリソース作成および変更要求は、プロジェクトのそれぞれの LimitRange オブジェクトに対して評価されます。リソースが列挙される制約のいずれかに違反する場合、そのリソースは拒否されます。
以下は、Pod、コンテナー、イメージ、イメージストリーム、または PVC のすべてのコンポーネントの制限範囲オブジェクトを示しています。同じオブジェクト内のこれらのコンポーネントのいずれかまたはすべての制限を設定できます。リソースを制御するプロジェクトごとに、異なる制限範囲オブジェクトを作成します。
コンテナーの制限オブジェクトのサンプル
apiVersion: "v1"
kind: "LimitRange"
metadata:
name: "resource-limits"
spec:
limits:
- type: "Container"
max:
cpu: "2"
memory: "1Gi"
min:
cpu: "100m"
memory: "4Mi"
default:
cpu: "300m"
memory: "200Mi"
defaultRequest:
cpu: "200m"
memory: "100Mi"
maxLimitRequestRatio:
cpu: "10"8.3.1.1. コンポーネントの制限について
以下の例は、それぞれのコンポーネントの制限範囲パラメーターを示しています。これらの例は明確にするために使用されます。必要に応じて、いずれかまたはすべてのコンポーネントの単一の LimitRange オブジェクトを作成できます。
8.3.1.1.1. コンテナーの制限
制限範囲により、Pod の各コンテナーが特定のプロジェクトに要求できる最小および最大 CPU およびメモリーを指定できます。コンテナーがプロジェクトに作成される場合、Pod 仕様のコンテナー CPU およびメモリー要求は LimitRange オブジェクトに設定される値に準拠する必要があります。そうでない場合には、Pod は作成されません。
-
コンテナーの CPU またはメモリーの要求および制限は、
LimitRangeオブジェクトで指定されるコンテナーのminリソース制約以上である必要があります。 コンテナーの CPU またはメモリーの要求と制限は、
LimitRangeオブジェクトで指定されたコンテナーのmaxリソース制約以下である必要があります。LimitRangeオブジェクトがmaxCPU を定義する場合、Pod仕様に CPUrequest値を定義する必要はありません。ただし、制限範囲で指定される最大 CPU 制約を満たす CPUlimit値を指定する必要があります。コンテナー制限の要求に対する比率は、
LimitRangeオブジェクトに指定されるコンテナーのmaxLimitRequestRatio値以下である必要があります。LimitRangeオブジェクトでmaxLimitRequestRatio制約を定義する場合、新規コンテナーにはrequestおよびlimit値の両方が必要になります。Red Hat OpenShift Service on AWS は、limitをrequestで除算して制限の要求に対する比率を算出します。この値は、1 より大きい正の整数でなければなりません。たとえば、コンテナーの
limit値がcpu: 500で、request値がcpu: 100である場合、cpuの要求に対する制限の比は5になります。この比率はmaxLimitRequestRatioより小さいか等しくなければなりません。
Pod 仕様でコンテナーリソースメモリーまたは制限を指定しない場合、制限範囲オブジェクトに指定されるコンテナーの default または defaultRequest CPU およびメモリー値はコンテナーに割り当てられます。
コンテナー LimitRange オブジェクトの定義
apiVersion: "v1"
kind: "LimitRange"
metadata:
name: "resource-limits"
spec:
limits:
- type: "Container"
max:
cpu: "2"
memory: "1Gi"
min:
cpu: "100m"
memory: "4Mi"
default:
cpu: "300m"
memory: "200Mi"
defaultRequest:
cpu: "200m"
memory: "100Mi"
maxLimitRequestRatio:
cpu: "10" - 1
- LimitRange オブジェクトの名前です。
- 2
- Pod の単一コンテナーが要求できる CPU の最大量です。
- 3
- Pod の単一コンテナーが要求できるメモリーの最大量です。
- 4
- Pod の単一コンテナーが要求できる CPU の最小量です。
- 5
- Pod の単一コンテナーが要求できるメモリーの最小量です。
- 6
- コンテナーが使用できる CPU のデフォルト量 (
Pod仕様に指定されていない場合)。 - 7
- コンテナーが使用できるメモリーのデフォルト量 (
Pod仕様に指定されていない場合)。 - 8
- コンテナーが要求できる CPU のデフォルト量 (
Pod仕様に指定されていない場合)。 - 9
- コンテナーが要求できるメモリーのデフォルト量 (
Pod仕様に指定されていない場合)。 - 10
- コンテナーの要求に対する制限の最大比率。
8.3.1.1.2. Pod の制限
制限範囲により、所定プロジェクトの Pod 全体でのすべてのコンテナーの CPU およびメモリーの最小および最大の制限を指定できます。コンテナーをプロジェクトに作成するには、Pod 仕様のコンテナー CPU およびメモリー要求は LimitRange オブジェクトに設定される値に準拠する必要があります。そうでない場合には、Pod は作成されません。
Pod 仕様でコンテナーリソースメモリーまたは制限を指定しない場合、制限範囲オブジェクトに指定されるコンテナーの default または defaultRequest CPU およびメモリー値はコンテナーに割り当てられます。
Pod のすべてのコンテナーにおいて、以下を満たしている必要があります。
-
コンテナーの CPU またはメモリーの要求および制限は、
LimitRangeオブジェクトに指定される Pod のminリソース制約以上である必要があります。 -
コンテナーの CPU またはメモリーの要求および制限は、
LimitRangeオブジェクトに指定される Pod のmaxリソース制約以下である必要があります。 -
コンテナー制限の要求に対する比率は、
LimitRangeオブジェクトに指定されるmaxLimitRequestRatio制約以下である必要があります。
Pod LimitRange オブジェクト定義
apiVersion: "v1"
kind: "LimitRange"
metadata:
name: "resource-limits"
spec:
limits:
- type: "Pod"
max:
cpu: "2"
memory: "1Gi"
min:
cpu: "200m"
memory: "6Mi"
maxLimitRequestRatio:
cpu: "10" 8.3.1.1.3. イメージの制限
LimitRange オブジェクトを使用すると、OpenShift イメージレジストリーにプッシュできるイメージの最大サイズを指定できます。
OpenShift イメージレジストリーにイメージをプッシュする場合、以下を満たす必要があります。
-
イメージのサイズは、
LimitRangeオブジェクトで指定されるイメージのmaxサイズ以下である必要があります。
イメージ LimitRange オブジェクトの定義
apiVersion: "v1"
kind: "LimitRange"
metadata:
name: "resource-limits"
spec:
limits:
- type: openshift.io/Image
max:
storage: 1Gi イメージのサイズは、アップロードされるイメージのマニフェストで常に表示される訳ではありません。これは、とりわけ Docker 1.10 以上で作成され、v2 レジストリーにプッシュされたイメージの場合に該当します。このようなイメージが古い Docker デーモンでプルされると、イメージマニフェストはレジストリーによってスキーマ v1 に変換されますが、この場合サイズ情報が欠落します。イメージに設定されるストレージの制限がこのアップロードを防ぐことはありません。
現在、この問題 への対応が行われています。
8.3.1.1.4. イメージストリームの制限
LimitRange オブジェクトにより、イメージストリームの制限を指定できます。
各イメージストリームについて、以下が当てはまります。
-
ImageStream仕様のイメージタグ数は、LimitRangeオブジェクトのopenshift.io/image-tags制約以下である必要があります。 -
ImageStream仕様のイメージへの一意の参照数は、制限範囲オブジェクトのopenshift.io/images制約以下である必要があります。
イメージストリーム LimitRange オブジェクト定義
apiVersion: "v1"
kind: "LimitRange"
metadata:
name: "resource-limits"
spec:
limits:
- type: openshift.io/ImageStream
max:
openshift.io/image-tags: 20
openshift.io/images: 30
openshift.io/image-tags リソースは、一意のイメージ参照を表します。使用できる参照は、ImageStreamTag、ImageStreamImage および DockerImage になります。タグは、oc tag および oc import-image コマンドを使用して作成できます。内部参照か外部参照であるかの区別はありません。ただし、ImageStream の仕様でタグ付けされる一意の参照はそれぞれ 1 回のみカウントされます。内部コンテナーイメージレジストリーへのプッシュを制限しませんが、タグの制限に役立ちます。
openshift.io/images リソースは、イメージストリームのステータスに記録される一意のイメージ名を表します。これにより、OpenShift イメージレジストリーにプッシュできるイメージ数を制限できます。内部参照か外部参照であるかの区別はありません。
8.3.1.1.5. 永続ボリューム要求の制限
LimitRange オブジェクトにより、永続ボリューム要求 (PVC) で要求されるストレージを制限できます。
プロジェクトのすべての永続ボリューム要求において、以下が一致している必要があります。
-
永続ボリューム要求 (PVC) のリソース要求は、
LimitRangeオブジェクトに指定される PVC のmin制約以上である必要があります。 -
永続ボリューム要求 (PVC) のリソース要求は、
LimitRangeオブジェクトに指定される PVC のmax制約以下である必要があります。
PVC LimitRange オブジェクト定義
apiVersion: "v1"
kind: "LimitRange"
metadata:
name: "resource-limits"
spec:
limits:
- type: "PersistentVolumeClaim"
min:
storage: "2Gi"
max:
storage: "50Gi" 8.3.2. 制限範囲の作成
制限範囲をプロジェクトに適用するには、以下を実行します。
必要な仕様で
LimitRangeオブジェクトを作成します。apiVersion: "v1" kind: "LimitRange" metadata: name: "resource-limits"1 spec: limits: - type: "Pod"2 max: cpu: "2" memory: "1Gi" min: cpu: "200m" memory: "6Mi" - type: "Container"3 max: cpu: "2" memory: "1Gi" min: cpu: "100m" memory: "4Mi" default:4 cpu: "300m" memory: "200Mi" defaultRequest:5 cpu: "200m" memory: "100Mi" maxLimitRequestRatio:6 cpu: "10" - type: openshift.io/Image7 max: storage: 1Gi - type: openshift.io/ImageStream8 max: openshift.io/image-tags: 20 openshift.io/images: 30 - type: "PersistentVolumeClaim"9 min: storage: "2Gi" max: storage: "50Gi"- 1
LimitRangeオブジェクトの名前を指定します。- 2
- Pod の制限を設定するには、必要に応じて CPU およびメモリーの最小および最大要求を指定します。
- 3
- コンテナーの制限を設定するには、必要に応じて CPU およびメモリーの最小および最大要求を指定します。
- 4
- オプション: コンテナーの場合、
Pod仕様で指定されていない場合、コンテナーが使用できる CPU またはメモリーのデフォルト量を指定します。 - 5
- オプション: コンテナーの場合、
Pod仕様で指定されていない場合、コンテナーが要求できる CPU またはメモリーのデフォルト量を指定します。 - 6
- オプション: コンテナーの場合、
Pod仕様で指定できる要求に対する制限の最大比率を指定します。 - 7
- Image オブジェクトに制限を設定するには、OpenShift イメージレジストリーにプッシュできるイメージの最大サイズを設定します。
- 8
- イメージストリームの制限を設定するには、必要に応じて
ImageStreamオブジェクトファイルにあるイメージタグおよび参照の最大数を設定します。 - 9
- 永続ボリューム要求の制限を設定するには、要求できるストレージの最小および最大量を設定します。
オブジェクトを作成します。
$ oc create -f <limit_range_file> -n <project>1 - 1
- 作成した YAML ファイルの名前と、制限を適用する必要のあるプロジェクトを指定します。
8.3.3. 制限の表示
Web コンソールでプロジェクトの Quota ページに移動し、プロジェクトで定義される制限を表示できます。
CLI を使用して制限範囲の詳細を表示することもできます。
プロジェクトで定義される
LimitRangeオブジェクトのリストを取得します。たとえば、demoproject というプロジェクトの場合は以下のようになります。$ oc get limits -n demoprojectNAME CREATED AT resource-limits 2020-07-15T17:14:23Z関連のある
LimitRangeオブジェクトを記述します。たとえば、resource-limits制限範囲の場合は以下のようになります。$ oc describe limits resource-limits -n demoprojectName: resource-limits Namespace: demoproject Type Resource Min Max Default Request Default Limit Max Limit/Request Ratio ---- -------- --- --- --------------- ------------- ----------------------- Pod cpu 200m 2 - - - Pod memory 6Mi 1Gi - - - Container cpu 100m 2 200m 300m 10 Container memory 4Mi 1Gi 100Mi 200Mi - openshift.io/Image storage - 1Gi - - - openshift.io/ImageStream openshift.io/image - 12 - - - openshift.io/ImageStream openshift.io/image-tags - 10 - - - PersistentVolumeClaim storage - 50Gi - - -
8.3.4. 制限範囲の削除
プロジェクトで制限を実施しないように有効な LimitRange オブジェクト削除するには、以下を実行します。
以下のコマンドを実行します。
$ oc delete limits <limit_name>
8.4. コンテナーメモリーとリスク要件を満たすためのクラスターメモリーの設定
クラスター管理者は、以下を実行し、クラスターがアプリケーションメモリーの管理を通じて効率的に動作するようにすることができます。
- コンテナー化されたアプリケーションコンポーネントのメモリーおよびリスク要件を判別し、それらの要件を満たすようコンテナーメモリーパラメーターを設定する
- コンテナー化されたアプリケーションランタイム (OpenJDK など) を、設定されたコンテナーメモリーパラメーターに基づいて最適に実行されるよう設定する
- コンテナーでの実行に関連するメモリー関連のエラー状態を診断し、これを解決する
8.4.1. アプリケーションメモリーの管理について
まず Red Hat OpenShift Service on AWS によるコンピュートリソースの管理方法の概要をよく読んでから次の手順に進むことを推奨します。
各種のリソース (メモリー、cpu、ストレージ) に応じて、Red Hat OpenShift Service on AWS ではオプションの 要求 および 制限 の値を Pod の各コンテナーに設定できます。
メモリー要求とメモリー制限について、以下の点に注意してください。
メモリーリクエスト
- メモリー要求値が指定されている場合、Red Hat OpenShift Service on AWS スケジューラーに影響します。スケジューラーは、コンテナーのノードへのスケジュール時にメモリー要求を考慮し、コンテナーの使用のために選択されたノードで要求されたメモリーをフェンスオフします。
- ノードのメモリーが不足した場合、Red Hat OpenShift Service on AWS は、メモリー使用量がメモリー要求を最も超過しているコンテナーを優先的に退避させます。メモリー枯渇が深刻な場合、ノード OOM キラーが同様のメトリクスに基づいてコンテナー内のプロセスを選択して強制終了することがあります。
- クラスター管理者は、メモリー要求値に対してクォータを割り当てるか、デフォルト値を割り当てることができます。
- クラスター管理者は、クラスターのオーバーコミットを管理するために開発者が指定するメモリー要求の値をオーバーライドできます。
メモリー制限
- メモリー制限値が指定されている場合、コンテナーのすべてのプロセスに割り当て可能なメモリーにハード制限を指定します。
- コンテナーのすべてのプロセスで割り当てられるメモリーがメモリー制限を超過する場合、ノードの OOM (Out of Memory) killer はコンテナーのプロセスをすぐに選択し、これを強制終了します。
- メモリー要求とメモリー制限の両方が指定される場合、メモリー制限の値はメモリー要求の値よりも大きいか、これと等しくなければなりません。
- クラスター管理者は、メモリーの制限値に対してクォータを割り当てるか、デフォルト値を割り当てることができます。
-
最小メモリー制限は 12 MB です。
Cannot allocate memoryPod イベントのためにコンテナーの起動に失敗すると、メモリー制限は低くなります。メモリー制限を引き上げるか、これを削除します。制限を削除すると、Pod は制限のないノードのリソースを消費できるようになります。
8.4.1.1. アプリケーションメモリーストラテジーの管理
Red Hat OpenShift Service on AWS でアプリケーションメモリーをサイジングする手順は以下の通りです。
予想されるコンテナーのメモリー使用の判別
必要時に予想される平均およびピーク時のコンテナーのメモリー使用を判別します (例: 別の負荷テストを実行)。コンテナーで並行して実行されている可能性のあるすべてのプロセスを必ず考慮に入れるようにしてください。たとえば、メインのアプリケーションは付属スクリプトを生成しているかどうかを確認します。
リスク選好 (risk appetite) の判別
退避のリスク選好を判別します。リスク選好のレベルが低い場合、コンテナーは予想されるピーク時の使用量と安全マージンのパーセンテージに応じてメモリーを要求します。リスク選好が高くなる場合、予想される平均の使用量に応じてメモリーを要求することがより適切な場合があります。
コンテナーのメモリー要求の設定
上記に基づいてコンテナーのメモリー要求を設定します。要求がアプリケーションのメモリー使用をより正確に表示することが望ましいと言えます。要求が高すぎる場合には、クラスターおよびクォータの使用が非効率となります。要求が低すぎる場合、アプリケーションの退避の可能性が高まります。
コンテナーのメモリー制限の設定 (必要な場合)
必要時にコンテナーのメモリー制限を設定します。制限を設定すると、コンテナーのすべてのプロセスのメモリー使用量の合計が制限を超える場合にコンテナーのプロセスがすぐに強制終了されるため、いくつかの利点をもたらします。まずは予期しないメモリー使用の超過を早期に明確にする ("fail fast" (早く失敗する)) ことができ、次にプロセスをすぐに中止できます。
一部の Red Hat OpenShift Service on AWS クラスターでは制限値を設定する必要があります。制限に基づいて要求をオーバーライドする場合があります。また、一部のアプリケーションイメージは、要求値よりも検出が簡単なことから設定される制限値に依存します。
メモリー制限が設定される場合、これは予想されるピーク時のコンテナーのメモリー使用量と安全マージンのパーセンテージよりも低い値に設定することはできません。
アプリケーションが調整されていることの確認
適切な場合は、設定される要求および制限値に関連してアプリケーションが調整されていることを確認します。この手順は、JVM などのメモリーをプールするアプリケーションにおいてとくに当てはまります。残りの部分では、これを説明します。
8.4.2. Red Hat OpenShift Service on AWS の OpenJDK 設定について
デフォルトの OpenJDK 設定はコンテナー化された環境では機能しません。そのため、コンテナーで OpenJDK を実行する場合は常に追加の Java メモリー設定を指定する必要があります。
JVM のメモリーレイアウトは複雑で、バージョンに依存しており、この詳細はこのドキュメントでは説明しません。ただし、コンテナーで OpenJDK を実行する際のスタートにあたって少なくとも以下の 3 つのメモリー関連のタスクが主なタスクになります。
- JVM 最大ヒープサイズをオーバーライドする。
- JVM が未使用メモリーをオペレーティングシステムに解放するよう促す (適切な場合)。
- コンテナー内のすべての JVM プロセスが適切に設定されていることを確認する。
コンテナーでの実行に向けて JVM ワークロードを最適に調整する方法はこのドキュメントでは扱いませんが、これには複数の JVM オプションを追加で設定することが必要になる場合があります。
8.4.2.1. JVM の最大ヒープサイズをオーバーライドする方法について
OpenJDK は、デフォルトで、使用可能なメモリーの最大 25% を "ヒープ" メモリーに使用します。その際、コンテナーに設定されたメモリー制限も考慮されます。このデフォルト値は控えめな値であり、適切に設定されたコンテナー環境でこの値を使用すると、コンテナーに割り当てられたメモリーの 75% がほとんど使用されないことになります。コンテナーレベルでメモリー制限が課されるコンテナーコンテキストでは、JVM がヒープメモリーに使用する割合を 80% などかなり高く設定する方が適しています。
ほとんどの Red Hat コンテナーには、JVM の起動時に値を更新して OpenJDK のデフォルト設定を置き換える起動スクリプトが含まれています。
たとえば、Red Hat build of OpenJDK コンテナーのデフォルト値は 80% です。この値は、JAVA_MAX_RAM_RATIO 環境変数を定義することで異なるパーセンテージに設定できます。
その他の OpenJDK デプロイメントの場合、次のコマンドを使用してデフォルト値の 25% を変更できます。
例
$ java -XX:MaxRAMPercentage=80.08.4.2.2. JVM で未使用メモリーをオペレーティングシステムに解放するよう促す方法について
デフォルトで、OpenJDK は未使用メモリーをオペレーティングシステムに積極的に返しません。これは多くのコンテナー化された Java ワークロードには適していますが、例外として、コンテナー内に JVM と共存する追加のアクティブなプロセスがあるワークロードの場合を考慮する必要があります。それらの追加のプロセスはネイティブのプロセスである場合や追加の JVM の場合、またはこれら 2 つの組み合わせである場合もあります。
Java ベースのエージェントは、次の JVM 引数を使用して、JVM が未使用のメモリーをオペレーティングシステムに解放するように促すことができます。
-XX:+UseParallelGC
-XX:MinHeapFreeRatio=5 -XX:MaxHeapFreeRatio=10 -XX:GCTimeRatio=4
-XX:AdaptiveSizePolicyWeight=90
これらの引数は、割り当てられたメモリーが使用中のメモリー (-XX:MaxHeapFreeRatio) の 110% を超え、ガベージコレクター (-XX:GCTimeRatio) での CPU 時間の 20% を使用する場合は常にヒープメモリーをオペレーティングシステムに返すことが意図されています。アプリケーションのヒープ割り当てが初期のヒープ割り当て (-XX:InitialHeapSize / -Xms でオーバーライドされる) を下回ることはありません。詳細は、Tuning Java’s footprint in OpenShift (Part 1)、Tuning Java’s footprint in OpenShift (Part 2)、および OpenJDK and Containers を参照してください。
8.4.2.3. コンテナー内のすべての JVM プロセスが適切に設定されていることを確認する方法について
複数の JVM が同じコンテナーで実行される場合、それらすべてが適切に設定されていることを確認する必要があります。多くのワークロードでは、それぞれの JVM に memory budget のパーセンテージを付与する必要があります。これにより大きな安全マージンが残される場合があります。
多くの Java ツールは JVM を設定するために各種の異なる環境変数 (JAVA_OPTS、GRADLE_OPTS など) を使用します。適切な設定が適切な JVM に渡されていることを確認するのが容易でない場合もあります。
JAVA_TOOL_OPTIONS 環境変数は OpenJDK によって常に考慮されます。JAVA_TOOL_OPTIONS で指定した値は、JVM コマンドラインで指定した他のオプションによってオーバーライドされます。デフォルトでは、Java ベースのエージェントイメージで実行されるすべての JVM ワークロードに対してこれらのオプションがデフォルトで使用されるように、Red Hat OpenShift Service on AWS の Jenkins Maven エージェントイメージによって次の変数が設定されます。
JAVA_TOOL_OPTIONS="-Dsun.zip.disableMemoryMapping=true"この設定は、追加オプションが要求されないことを保証する訳ではなく、有用な開始点になることを意図しています。
8.4.3. Pod 内でのメモリー要求および制限の検索
Pod 内からメモリー要求および制限を動的に検出するアプリケーションでは Downward API を使用する必要があります。
手順
MEMORY_REQUESTとMEMORY_LIMITスタンザを追加するように Pod を設定します。以下のような YAML ファイルを作成します。
apiVersion: v1 kind: Pod metadata: name: test spec: securityContext: runAsNonRoot: false seccompProfile: type: RuntimeDefault containers: - name: test image: fedora:latest command: - sleep - "3600" env: - name: MEMORY_REQUEST1 valueFrom: resourceFieldRef: containerName: test resource: requests.memory - name: MEMORY_LIMIT2 valueFrom: resourceFieldRef: containerName: test resource: limits.memory resources: requests: memory: 384Mi limits: memory: 512Mi securityContext: allowPrivilegeEscalation: false capabilities: drop: [ALL]以下のコマンドを実行して Pod を作成します。
$ oc create -f <file_name>.yaml
検証
リモートシェルを使用して Pod にアクセスします。
$ oc rsh test要求された値が適用されていることを確認します。
$ env | grep MEMORY | sort出力例
MEMORY_LIMIT=536870912 MEMORY_REQUEST=402653184
メモリー制限値は、/sys/fs/cgroup/memory/memory.limit_in_bytes ファイルによってコンテナー内から読み取ることもできます。
8.4.4. OOM の強制終了ポリシーについて
Red Hat OpenShift Service on AWS は、コンテナーのすべてのプロセスのメモリー使用量の合計がメモリー制限を超えるか、またはノードのメモリーを使い切られるなどの深刻な状態が生じる場合にコンテナーのプロセスを強制終了する場合があります。
プロセスが OOM (Out of Memory) によって強制終了される場合、コンテナーがすぐに終了する場合があります。コンテナーの PID 1 プロセスが SIGKILL を受信する場合、コンテナーはすぐに終了します。それ以外の場合、コンテナーの動作は他のプロセスの動作に依存します。
たとえば、コンテナーのプロセスは、SIGKILL シグナルを受信したことを示すコード 137 で終了します。
コンテナーがすぐに終了しない場合、OOM による強制終了は以下のように検出できます。
リモートシェルを使用して Pod にアクセスします。
# oc rsh <pod name>以下のコマンドを実行して、
/sys/fs/cgroup/memory/memory.oom_controlで現在の OOM kill カウントを表示します。$ grep '^oom_kill ' /sys/fs/cgroup/memory/memory.oom_control出力例
oom_kill 0以下のコマンドを実行して、Out Of Memory (OOM) による強制終了を促します。
$ sed -e '' </dev/zero出力例
Killed以下のコマンドを実行して、
/sys/fs/cgroup/memory/memory.oom_controlの OOM kill カウンターの増分を表示します。$ grep '^oom_kill ' /sys/fs/cgroup/memory/memory.oom_control出力例
oom_kill 1Pod の 1 つ以上のプロセスが OOM で強制終了され、Pod がこれに続いて終了する場合 (即時であるかどうかは問わない)、フェーズは Failed、理由は OOMKilled になります。OOM で強制終了された Pod は
restartPolicyの値によって再起動する場合があります。再起動されない場合は、レプリケーションコントローラーなどのコントローラーが Pod の失敗したステータスを認識し、古い Pod に置き換わる新規 Pod を作成します。Pod のステータスを取得するには、次のコマンドを使用します。
$ oc get pod test出力例
NAME READY STATUS RESTARTS AGE test 0/1 OOMKilled 0 1mPod が再起動されていない場合は、以下のコマンドを実行して Pod を表示します。
$ oc get pod test -o yaml出力例
... status: containerStatuses: - name: test ready: false restartCount: 0 state: terminated: exitCode: 137 reason: OOMKilled phase: Failed再起動した場合は、以下のコマンドを実行して Pod を表示します。
$ oc get pod test -o yaml出力例
... status: containerStatuses: - name: test ready: true restartCount: 1 lastState: terminated: exitCode: 137 reason: OOMKilled state: running: phase: Running
8.4.5. Pod の退避について
Red Hat OpenShift Service on AWS は、ノードのメモリーが使い果たされると、Pod をノードから退避させることがあります。メモリー枯渇の程度に応じて、退避はグレースフルに行われる場合もあれば、そうでない場合もあります。グレースフルな退避とは、各コンテナーのメインプロセス (PID 1) が SIGTERM シグナルを受信し、それでもプロセスがまだ終了していない場合に、しばらくしてから SIGKILL シグナルを受信することを意味します。グレースフルではない退避とは、各コンテナーのメインプロセスが直ちに SIGKILL シグナルを受信することを意味します。
退避した Pod のフェーズは Failed になり、理由は Evicted になります。この場合、restartPolicy の値に関係なく再起動されません。ただし、レプリケーションコントローラーなどのコントローラーは Pod の失敗したステータスを認識し、古い Pod に置き換わる新規 Pod を作成します。
$ oc get pod test出力例
NAME READY STATUS RESTARTS AGE
test 0/1 Evicted 0 1m$ oc get pod test -o yaml出力例
...
status:
message: 'Pod The node was low on resource: [MemoryPressure].'
phase: Failed
reason: Evicted8.5. オーバーコミットされたノード上に Pod を配置するためのクラスターの設定
オーバーコミット とは、コンテナーの計算リソース要求と制限の合計が、そのシステムで利用できるリソースを超えた状態のことです。オーバーコミットの使用は、容量に対して保証されたパフォーマンスのトレードオフが許容可能である開発環境において必要になる場合があります。
コンテナーは、コンピュートリソース要求および制限を指定することができます。要求はコンテナーのスケジューリングに使用され、最小限のサービス保証を提供します。制限は、ノード上で消費できるコンピュートリソースの量を制限します。
スケジューラーは、クラスター内のすべてのノードにおけるコンピュートリソース使用の最適化を試行します。これは Pod のコンピュートリソース要求とノードの利用可能な容量を考慮に入れて Pod を特定のノードに配置します。
Red Hat OpenShift Service on AWS 管理者は、Pod の配置動作と、オーバーコミットが超過できないプロジェクトごとのリソース制限を設定することで、ノードのコンテナー密度を管理できます。
または、Red Hat によって管理されていないお客様が作成した namespace で、プロジェクトレベルのリソースのオーバーコミットを無効にすることもできます。
コンテナーリソース管理の詳細は、関連情報を参照してください。
8.5.1. プロジェクトレベルの制限
Red Hat OpenShift Service on AWS では、プロジェクトレベルのリソースのオーバーコミットがデフォルトで有効になっています。ユースケースで必要な場合は、Red Hat によって管理されていないプロジェクトでオーバーコミットメントを無効にできます。
Red Hat によって管理され、変更できないプロジェクトのリストは、サポート の 「Red Hat によって管理されるリソース」を参照してください。
8.5.1.1. プロジェクトのオーバーコミットの無効化
ユースケースで必要な場合は、Red Hat によって管理されていないプロジェクトでオーバーコミットを無効にできます。変更できないプロジェクトのリストは、サポート の「Red Hat によって管理されるリソース」を参照してください。
前提条件
- クラスター管理者またはクラスター編集者の権限を持つアカウントを使用してクラスターにログインしている。
手順
namespace オブジェクトファイルを編集します。
Web コンソールを使用している場合:
- Administration → Namespaces をクリックし、プロジェクトの namespace をクリックします。
- Annotations セクションで、Edit ボタンをクリックします。
-
Add more をクリックし、Key として
quota.openshift.io/cluster-resource-override-enabledを、Value としてfalseを使用する新しいアノテーションを入力します。 - Save をクリックします。
ROSA CLI (
rosa) を使用している場合:namespace を編集します。
$ rosa edit namespace/<project_name>以下のアノテーションを追加します。
apiVersion: v1 kind: Namespace metadata: annotations: quota.openshift.io/cluster-resource-override-enabled: "false" <.> # ...<.> このアノテーションを
falseに設定すると、この namespace のオーバーコミットが無効になります。
Legal Notice
Copyright © Red Hat
OpenShift documentation is licensed under the Apache License 2.0 (https://www.apache.org/licenses/LICENSE-2.0).
Modified versions must remove all Red Hat trademarks.
Portions adapted from https://github.com/kubernetes-incubator/service-catalog/ with modifications by Red Hat.
Red Hat, Red Hat Enterprise Linux, the Red Hat logo, the Shadowman logo, JBoss, OpenShift, Fedora, the Infinity logo, and RHCE are trademarks of Red Hat, Inc., registered in the United States and other countries.
Linux® is the registered trademark of Linus Torvalds in the United States and other countries.
Java® is a registered trademark of Oracle and/or its affiliates.
XFS® is a trademark of Silicon Graphics International Corp. or its subsidiaries in the United States and/or other countries.
MySQL® is a registered trademark of MySQL AB in the United States, the European Union and other countries.
Node.js® is an official trademark of the OpenJS Foundation.
The OpenStack® Word Mark and OpenStack logo are either registered trademarks/service marks or trademarks/service marks of the OpenStack Foundation, in the United States and other countries and are used with the OpenStack Foundation’s permission. We are not affiliated with, endorsed or sponsored by the OpenStack Foundation, or the OpenStack community.
All other trademarks are the property of their respective owners.