Chapter 5. Using Container Storage Interface (CSI)
5.1. Configuring CSI volumes
The Container Storage Interface (CSI) allows OpenShift Container Platform to consume storage from storage back ends that implement the CSI interface as persistent storage.
OpenShift Container Platform 4.6 supports version 1.2.0 of the CSI specification.
5.1.1. CSI Architecture
CSI drivers are typically shipped as container images. These containers are not aware of OpenShift Container Platform where they run. To use CSI-compatible storage back end in OpenShift Container Platform, the cluster administrator must deploy several components that serve as a bridge between OpenShift Container Platform and the storage driver.
The following diagram provides a high-level overview about the components running in pods in the OpenShift Container Platform cluster.
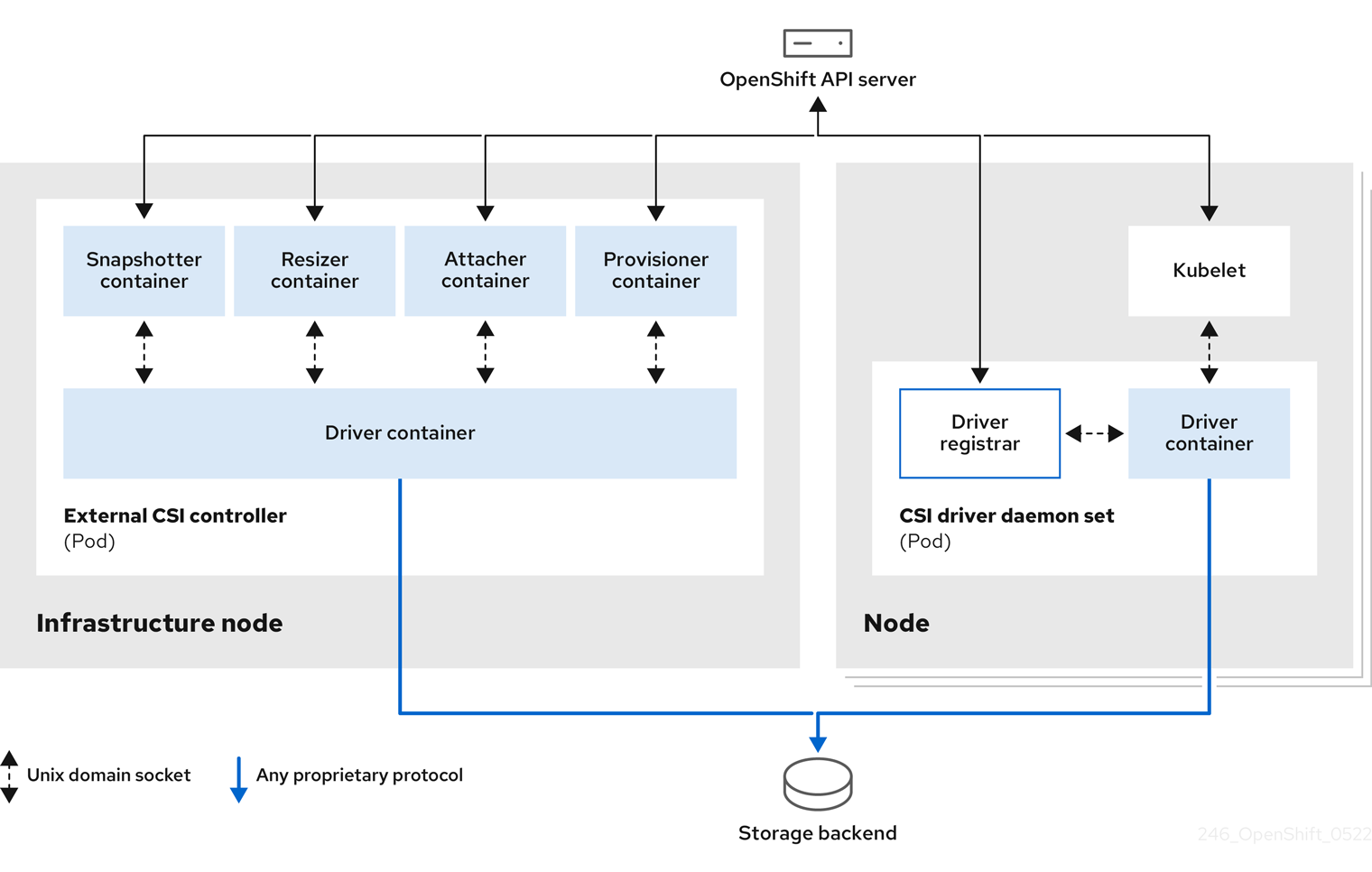
It is possible to run multiple CSI drivers for different storage back ends. Each driver needs its own external controllers deployment and daemon set with the driver and CSI registrar.
5.1.1.1. External CSI controllers
External CSI Controllers is a deployment that deploys one or more pods with five containers:
-
The snapshotter container watches
VolumeSnapshotandVolumeSnapshotContentobjects and is responsible for the creation and deletion ofVolumeSnapshotContentobject. -
The resizer container is a sidecar container that watches for
PersistentVolumeClaimupdates and triggersControllerExpandVolumeoperations against a CSI endpoint if you request more storage onPersistentVolumeClaimobject. -
An external CSI attacher container translates
attachanddetachcalls from OpenShift Container Platform to respectiveControllerPublishandControllerUnpublishcalls to the CSI driver. -
An external CSI provisioner container that translates
provisionanddeletecalls from OpenShift Container Platform to respectiveCreateVolumeandDeleteVolumecalls to the CSI driver. - A CSI driver container
The CSI attacher and CSI provisioner containers communicate with the CSI driver container using UNIX Domain Sockets, ensuring that no CSI communication leaves the pod. The CSI driver is not accessible from outside of the pod.
attach, detach, provision, and delete operations typically require the CSI driver to use credentials to the storage backend. Run the CSI controller pods on infrastructure nodes so the credentials are never leaked to user processes, even in the event of a catastrophic security breach on a compute node.
The external attacher must also run for CSI drivers that do not support third-party attach or detach operations. The external attacher will not issue any ControllerPublish or ControllerUnpublish operations to the CSI driver. However, it still must run to implement the necessary OpenShift Container Platform attachment API.
5.1.1.2. CSI driver daemon set
The CSI driver daemon set runs a pod on every node that allows OpenShift Container Platform to mount storage provided by the CSI driver to the node and use it in user workloads (pods) as persistent volumes (PVs). The pod with the CSI driver installed contains the following containers:
-
A CSI driver registrar, which registers the CSI driver into the
openshift-nodeservice running on the node. Theopenshift-nodeprocess running on the node then directly connects with the CSI driver using the UNIX Domain Socket available on the node. - A CSI driver.
The CSI driver deployed on the node should have as few credentials to the storage back end as possible. OpenShift Container Platform will only use the node plug-in set of CSI calls such as NodePublish/NodeUnpublish and NodeStage/NodeUnstage, if these calls are implemented.
5.1.2. CSI drivers supported by OpenShift Container Platform
OpenShift Container Platform installs certain Container Storage Interface (CSI) drivers by default, giving users storage options that are not possible with in-tree volume plug-ins.
To create CSI-provisioned persistent volumes that mount to these supported storage assets, OpenShift Container Platform installs the necessary CSI driver Operator, the CSI driver, and the required storage class by default. For more details about the default namespace of the Operator and driver, see the documentation for the specific CSI Driver Operator.
The following table describes the CSI drivers that are installed with OpenShift Container Platform and which CSI features they support, such as volume snapshots, cloning, and resize.
| CSI driver | CSI volume snapshots | CSI cloning | CSI resize |
|---|---|---|---|
| AWS EBS (Tech Preview) |
✅ |
- |
✅ |
| OpenStack Manila |
✅ |
- |
- |
| Red Hat Virtualization (oVirt) |
- |
- |
- |
If your CSI driver is not listed in the preceding table, you must follow the installation instructions provided by your CSI storage vendor to use their supported CSI features.
5.1.3. Dynamic provisioning
Dynamic provisioning of persistent storage depends on the capabilities of the CSI driver and underlying storage back end. The provider of the CSI driver should document how to create a storage class in OpenShift Container Platform and the parameters available for configuration.
The created storage class can be configured to enable dynamic provisioning.
Procedure
Create a default storage class that ensures all PVCs that do not require any special storage class are provisioned by the installed CSI driver.
# oc create -f - << EOF apiVersion: storage.k8s.io/v1 kind: StorageClass metadata: name: <storage-class>1 annotations: storageclass.kubernetes.io/is-default-class: "true" provisioner: <provisioner-name>2 parameters: EOF
5.1.4. Example using the CSI driver
The following example installs a default MySQL template without any changes to the template.
Prerequisites
- The CSI driver has been deployed.
- A storage class has been created for dynamic provisioning.
Procedure
Create the MySQL template:
# oc new-app mysql-persistentExample output
--> Deploying template "openshift/mysql-persistent" to project default ...# oc get pvcExample output
NAME STATUS VOLUME CAPACITY ACCESS MODES STORAGECLASS AGE mysql Bound kubernetes-dynamic-pv-3271ffcb4e1811e8 1Gi RWO cinder 3s
5.2. CSI inline ephemeral volumes
Container Storage Interface (CSI) inline ephemeral volumes allow you to define a Pod spec that creates inline ephemeral volumes when a pod is deployed and delete them when a pod is destroyed.
This feature is only available with supported Container Storage Interface (CSI) drivers.
CSI inline ephemeral volumes is a Technology Preview feature only. Technology Preview features are not supported with Red Hat production service level agreements (SLAs) and might not be functionally complete. Red Hat does not recommend using them in production. These features provide early access to upcoming product features, enabling customers to test functionality and provide feedback during the development process.
For more information about the support scope of Red Hat Technology Preview features, see https://access.redhat.com/support/offerings/techpreview/.
5.2.1. Overview of CSI inline ephemeral volumes
Traditionally, volumes that are backed by Container Storage Interface (CSI) drivers can only be used with a PersistentVolume and PersistentVolumeClaim object combination.
This feature allows you to specify CSI volumes directly in the Pod specification, rather than in a PersistentVolume object. Inline volumes are ephemeral and do not persist across pod restarts.
5.2.1.1. Support limitations
By default, OpenShift Container Platform supports CSI inline ephemeral volumes with these limitations:
- Support is only available for CSI drivers. In-tree and FlexVolumes are not supported.
- OpenShift Container Platform does not include any CSI drivers. Use the CSI drivers provided by community or storage vendors. Follow the installation instructions provided by the CSI driver.
-
CSI drivers might not have implemented the inline volume functionality, including
Ephemeralcapacity. For details, see the CSI driver documentation.
5.2.2. Embedding a CSI inline ephemeral volume in the pod specification
You can embed a CSI inline ephemeral volume in the Pod specification in OpenShift Container Platform. At runtime, nested inline volumes follow the ephemeral lifecycle of their associated pods so that the CSI driver handles all phases of volume operations as pods are created and destroyed.
Procedure
-
Create the
Podobject definition and save it to a file. Embed the CSI inline ephemeral volume in the file.
my-csi-app.yaml
kind: Pod apiVersion: v1 metadata: name: my-csi-app spec: containers: - name: my-frontend image: busybox volumeMounts: - mountPath: "/data" name: my-csi-inline-vol command: [ "sleep", "1000000" ] volumes:1 - name: my-csi-inline-vol csi: driver: inline.storage.kubernetes.io volumeAttributes: foo: bar- 1
- The name of the volume that is used by pods.
Create the object definition file that you saved in the previous step.
$ oc create -f my-csi-app.yaml
5.3. CSI volume snapshots
This document describes how to use volume snapshots with supported Container Storage Interface (CSI) drivers to help protect against data loss in OpenShift Container Platform. Familiarity with persistent volumes is suggested.
CSI volume snapshot is a Technology Preview feature only. Technology Preview features are not supported with Red Hat production service level agreements (SLAs) and might not be functionally complete. Red Hat does not recommend using them in production. These features provide early access to upcoming product features, enabling customers to test functionality and provide feedback during the development process.
For more information about the support scope of Red Hat Technology Preview features, see https://access.redhat.com/support/offerings/techpreview/.
CSI volume snapshot is a fully supported feature in OpenShift Container Platform 4.6 only for Red Hat OpenShift Container Storage or OpenShift Virtualization.
5.3.1. Overview of CSI volume snapshots
A snapshot represents the state of the storage volume in a cluster at a particular point in time. Volume snapshots can be used to provision a new volume.
OpenShift Container Platform supports CSI volume snapshots by default. However, a specific CSI driver is required.
With CSI volume snapshots, a cluster administrator can:
- Deploy a third-party CSI driver that supports snapshots.
- Create a new persistent volume claim (PVC) from an existing volume snapshot.
- Take a snapshot of an existing PVC.
- Restore a snapshot as a different PVC.
- Delete an existing volume snapshot.
With CSI volume snapshots, an app developer can:
- Use volume snapshots as building blocks for developing application- or cluster-level storage backup solutions.
- Rapidly rollback to a previous development version.
- Use storage more efficiently by not having to make a full copy each time.
Be aware of the following when using volume snapshots:
- Support is only available for CSI drivers. In-tree and FlexVolumes are not supported.
- OpenShift Container Platform only ships with select CSI drivers. For CSI drivers that are not provided by an OpenShift Container Platform Driver Operator, it is recommended to use the CSI drivers provided by community or storage vendors. Follow the installation instructions provided by the CSI driver.
-
CSI drivers may or may not have implemented the volume snapshot functionality. CSI drivers that have provided support for volume snapshots will likely use the
csi-external-snapshottersidecar. See documentation provided by the CSI driver for details.
5.3.2. CSI snapshot controller and sidecar
OpenShift Container Platform provides a snapshot controller that is deployed into the control plane. In addition, your CSI driver vendor provides the CSI snapshot sidecar as a helper container that is installed during the CSI driver installation.
The CSI snapshot controller and sidecar provide volume snapshotting through the OpenShift Container Platform API. These external components run in the cluster.
The external controller is deployed by the CSI Snapshot Controller Operator.
5.3.2.1. External controller
The CSI snapshot controller binds VolumeSnapshot and VolumeSnapshotContent objects. The controller manages dynamic provisioning by creating and deleting VolumeSnapshotContent objects.
5.3.2.2. External sidecar
Your CSI driver vendor provides the csi-external-snapshotter sidecar. This is a separate helper container that is deployed with the CSI driver. The sidecar manages snapshots by triggering CreateSnapshot and DeleteSnapshot operations. Follow the installation instructions provided by your vendor.
5.3.3. About the CSI Snapshot Controller Operator
The CSI Snapshot Controller Operator runs in the openshift-cluster-storage-operator namespace. It is installed by the Cluster Version Operator (CVO) in all clusters by default.
The CSI Snapshot Controller Operator installs the CSI snapshot controller, which runs in the openshift-cluster-storage-operator namespace.
5.3.3.1. Volume snapshot CRDs
During OpenShift Container Platform installation, the CSI Snapshot Controller Operator creates the following snapshot custom resource definitions (CRDs) in the snapshot.storage.k8s.io/v1beta1 API group:
VolumeSnapshotContentA snapshot taken of a volume in the cluster that has been provisioned by a cluster administrator.
Similar to the
PersistentVolumeobject, theVolumeSnapshotContentCRD is a cluster resource that points to a real snapshot in the storage back end.For manually pre-provisioned snapshots, a cluster administrator creates a number of
VolumeSnapshotContentCRDs. These carry the details of the real volume snapshot in the storage system.The
VolumeSnapshotContentCRD is not namespaced and is for use by a cluster administrator.VolumeSnapshotSimilar to the
PersistentVolumeClaimobject, theVolumeSnapshotCRD defines a developer request for a snapshot. The CSI Snapshot Controller Operator runs the CSI snapshot controller, which handles the binding of aVolumeSnapshotCRD with an appropriateVolumeSnapshotContentCRD. The binding is a one-to-one mapping.The
VolumeSnapshotCRD is namespaced. A developer uses the CRD as a distinct request for a snapshot.VolumeSnapshotClassAllows a cluster administrator to specify different attributes belonging to a
VolumeSnapshotCRD. These attributes may differ among snapshots taken of the same volume on the storage system, in which case they would not be expressed by using the same storage class of a persistent volume claim.The
VolumeSnapshotClassCRD defines the parameters for thecsi-external-snapshottersidecar to use when creating a snapshot. This allows the storage back end to know what kind of snapshot to dynamically create if multiple options are supported.Dynamically provisioned snapshots use the
VolumeSnapshotClassCRD to specify storage-provider-specific parameters to use when creating a snapshot.The
VolumeSnapshotContentClassCRD is not namespaced and is for use by a cluster administrator to enable global configuration options for their storage back end.
5.3.4. Volume snapshot provisioning
There are two ways to provision snapshots: dynamically and manually.
5.3.4.1. Dynamic provisioning
Instead of using a preexisting snapshot, you can request that a snapshot be taken dynamically from a persistent volume claim. Parameters are specified using a VolumeSnapshotClass CRD.
5.3.4.2. Manual provisioning
As a cluster administrator, you can manually pre-provision a number of VolumeSnapshotContent objects. These carry the real volume snapshot details available to cluster users.
5.3.5. Creating a volume snapshot
When you create a VolumeSnapshot object, OpenShift Container Platform creates a volume snapshot.
Prerequisites
- Logged in to a running OpenShift Container Platform cluster.
-
A PVC created using a CSI driver that supports
VolumeSnapshotobjects. - A storage class to provision the storage back end.
No pods are using the persistent volume claim (PVC) that you want to take a snapshot of.
NoteDo not create a volume snapshot of a PVC if a pod is using it. Doing so might cause data corruption because the PVC is not quiesced (paused). Be sure to first tear down a running pod to ensure consistent snapshots.
Procedure
To dynamically create a volume snapshot:
Create a file with the
VolumeSnapshotClassobject described by the following YAML:volumesnapshotclass.yaml
apiVersion: snapshot.storage.k8s.io kind: VolumeSnapshotClass1 metadata: name: csi-hostpath-snap driver: hostpath.csi.k8s.io deletionPolicy: Delete- 1
- Allows you to specify different attributes belonging to a volume snapshot.
Create the object you saved in the previous step by entering the following command:
$ oc create -f volumesnapshotclass.yamlCreate a
VolumeSnapshotobject:volumesnapshot-dynamic.yaml
apiVersion: snapshot.storage.k8s.io kind: VolumeSnapshot metadata: name: mysnap spec: volumeSnapshotClassName: csi-hostpath-snap1 source: persistentVolumeClaimName: myclaim2 - 1
- The request for a particular class by the volume snapshot. If
volumeSnapshotClassNameis empty, then no snapshot is created. - 2
- The name of the
PersistentVolumeClaimobject bound to a persistent volume. This defines what you want to create a snapshot of. Required for dynamically provisioning a snapshot.
Create the object you saved in the previous step by entering the following command:
$ oc create -f volumesnapshot-dynamic.yaml
To manually provision a snapshot:
Provide a value for the
volumeSnapshotContentNameparameter as the source for the snapshot, in addition to defining volume snapshot class as shown above.volumesnapshot-manual.yaml
apiVersion: snapshot.storage.k8s.io kind: VolumeSnapshot metadata: name: snapshot-demo spec: source: volumeSnapshotContentName: mycontent1 - 1
- The
volumeSnapshotContentNameparameter is required for pre-provisioned snapshots.
Create the object you saved in the previous step by entering the following command:
$ oc create -f volumesnapshot-manual.yaml
Verification
After the snapshot has been created in the cluster, additional details about the snapshot are available.
To display details about the volume snapshot that was created, enter the following command:
$ oc describe volumesnapshot mysnapThe following example displays details about the
mysnapvolume snapshot:volumesnapshot.yaml
apiVersion: snapshot.storage.k8s.io kind: VolumeSnapshot metadata: name: mysnap spec: source: persistentVolumeClaimName: myclaim volumeSnapshotClassName: csi-hostpath-snap status: boundVolumeSnapshotContentName: snapcontent-1af4989e-a365-4286-96f8-d5dcd65d78d61 creationTime: "2020-01-29T12:24:30Z"2 readyToUse: true3 restoreSize: 500Mi- 1
- The pointer to the actual storage content that was created by the controller.
- 2
- The time when the snapshot was created. The snapshot contains the volume content that was available at this indicated time.
- 3
- If the value is set to
true, the snapshot can be used to restore as a new PVC.
If the value is set tofalse, the snapshot was created. However, the storage back end needs to perform additional tasks to make the snapshot usable so that it can be restored as a new volume. For example, Amazon Elastic Block Store data might be moved to a different, less expensive location, which can take several minutes.
To verify that the volume snapshot was created, enter the following command:
$ oc get volumesnapshotcontentThe pointer to the actual content is displayed. If the
boundVolumeSnapshotContentNamefield is populated, aVolumeSnapshotContentobject exists and the snapshot was created.-
To verify that the snapshot is ready, confirm that the
VolumeSnapshotobject hasreadyToUse: true.
5.3.6. Deleting a volume snapshot
You can configure how OpenShift Container Platform deletes volume snapshots.
Procedure
Specify the deletion policy that you require in the
VolumeSnapshotClassobject, as shown in the following example:volumesnapshot.yaml
apiVersion: snapshot.storage.k8s.io kind: VolumeSnapshotClass metadata: name: csi-hostpath-snap driver: hostpath.csi.k8s.io deletionPolicy: Delete1 - 1
- When deleting the volume snapshot, if the
Deletevalue is set, the underlying snapshot is deleted along with theVolumeSnapshotContentobject. If theRetainvalue is set, both the underlying snapshot andVolumeSnapshotContentobject remain.
If theRetainvalue is set and theVolumeSnapshotobject is deleted without deleting the correspondingVolumeSnapshotContentobject, the content remains. The snapshot itself is also retained in the storage back end.
Delete the volume snapshot by entering the following command:
$ oc delete volumesnapshot <volumesnapshot_name>Example output
volumesnapshot.snapshot.storage.k8s.io "mysnapshot" deletedIf the deletion policy is set to
Retain, delete the volume snapshot content by entering the following command:$ oc delete volumesnapshotcontent <volumesnapshotcontent_name>Optional: If the
VolumeSnapshotobject is not successfully deleted, enter the following command to remove any finalizers for the leftover resource so that the delete operation can continue:ImportantOnly remove the finalizers if you are confident that there are no existing references from either persistent volume claims or volume snapshot contents to the
VolumeSnapshotobject. Even with the--forceoption, the delete operation does not delete snapshot objects until all finalizers are removed.$ oc patch -n $PROJECT volumesnapshot/$NAME --type=merge -p '{"metadata": {"finalizers":null}}'Example output
volumesnapshotclass.snapshot.storage.k8s.io "csi-ocs-rbd-snapclass" deletedThe finalizers are removed and the volume snapshot is deleted.
5.3.7. Restoring a volume snapshot
The VolumeSnapshot CRD content can be used to restore the existing volume to a previous state.
After your VolumeSnapshot CRD is bound and the readyToUse value is set to true, you can use that resource to provision a new volume that is pre-populated with data from the snapshot.
Prerequisites
- Logged in to a running OpenShift Container Platform cluster.
- A persistent volume claim (PVC) created using a Container Storage Interface (CSI) driver that supports volume snapshots.
- A storage class to provision the storage back end.
Procedure
Specify a
VolumeSnapshotdata source on a PVC as shown in the following:pvc-restore.yaml
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: myclaim-restore spec: storageClassName: csi-hostpath-sc dataSource: name: mysnap1 kind: VolumeSnapshot2 apiGroup: snapshot.storage.k8s.io3 accessModes: - ReadWriteOnce resources: requests: storage: 1GiCreate a PVC by entering the following command:
$ oc create -f pvc-restore.yamlVerify that the restored PVC has been created by entering the following command:
$ oc get pvcTwo different PVCs are displayed.
5.4. CSI volume cloning
Volume cloning duplicates an existing persistent volume to help protect against data loss in OpenShift Container Platform. This feature is only available with supported Container Storage Interface (CSI) drivers. You should be familiar with persistent volumes before you provision a CSI volume clone.
5.4.1. Overview of CSI volume cloning
A Container Storage Interface (CSI) volume clone is a duplicate of an existing persistent volume at a particular point in time.
Volume cloning is similar to volume snapshots, although it is more efficient. For example, a cluster administrator can duplicate a cluster volume by creating another instance of the existing cluster volume.
Cloning creates an exact duplicate of the specified volume on the back-end device, rather than creating a new empty volume. After dynamic provisioning, you can use a volume clone just as you would use any standard volume.
No new API objects are required for cloning. The existing dataSource field in the PersistentVolumeClaim object is expanded so that it can accept the name of an existing PersistentVolumeClaim in the same namespace.
5.4.1.1. Support limitations
By default, OpenShift Container Platform supports CSI volume cloning with these limitations:
- The destination persistent volume claim (PVC) must exist in the same namespace as the source PVC.
- The source and destination storage class must be the same.
- Support is only available for CSI drivers. In-tree and FlexVolumes are not supported.
- OpenShift Container Platform does not include any CSI drivers. Use the CSI drivers provided by community or storage vendors. Follow the installation instructions provided by the CSI driver.
- CSI drivers might not have implemented the volume cloning functionality. For details, see the CSI driver documentation.
- OpenShift Container Platform 4.6 supports version 1.1.0 of the CSI specification.
5.4.2. Provisioning a CSI volume clone
When you create a cloned persistent volume claim (PVC) API object, you trigger the provisioning of a CSI volume clone. The clone pre-populates with the contents of another PVC, adhering to the same rules as any other persistent volume. The one exception is that you must add a dataSource that references an existing PVC in the same namespace.
Prerequisites
- You are logged in to a running OpenShift Container Platform cluster.
- Your PVC is created using a CSI driver that supports volume cloning.
- Your storage back end is configured for dynamic provisioning. Cloning support is not available for static provisioners.
Procedure
To clone a PVC from an existing PVC:
Create and save a file with the
PersistentVolumeClaimobject described by the following YAML:pvc-clone.yaml
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: pvc-1-clone namespace: mynamespace spec: storageClassName: csi-cloning1 accessModes: - ReadWriteOnce resources: requests: storage: 5Gi dataSource: kind: PersistentVolumeClaim name: pvc-1- 1
- The name of the storage class that provisions the storage back end. The default storage class can be used and
storageClassNamecan be omitted in the spec.
Create the object you saved in the previous step by running the following command:
$ oc create -f pvc-clone.yamlA new PVC
pvc-1-cloneis created.Verify that the volume clone was created and is ready by running the following command:
$ oc get pvc pvc-1-cloneThe
pvc-1-cloneshows that it isBound.You are now ready to use the newly cloned PVC to configure a pod.
Create and save a file with the
Podobject described by the YAML. For example:kind: Pod apiVersion: v1 metadata: name: mypod spec: containers: - name: myfrontend image: dockerfile/nginx volumeMounts: - mountPath: "/var/www/html" name: mypd volumes: - name: mypd persistentVolumeClaim: claimName: pvc-1-clone1 - 1
- The cloned PVC created during the CSI volume cloning operation.
The created
Podobject is now ready to consume, clone, snapshot, or delete your cloned PVC independently of its originaldataSourcePVC.
5.5. AWS Elastic Block Store CSI Driver Operator
5.5.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for AWS Elastic Block Store (EBS).
AWS EBS CSI Driver Operator is a Technology Preview feature only. Technology Preview features are not supported with Red Hat production service level agreements (SLAs) and might not be functionally complete. Red Hat does not recommend using them in production. These features provide early access to upcoming product features, enabling customers to test functionality and provide feedback during the development process.
For more information about the support scope of Red Hat Technology Preview features, see https://access.redhat.com/support/offerings/techpreview/.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a Container Storage Interface (CSI) Operator and driver.
To create CSI-provisioned PVs that mount to AWS EBS storage assets, OpenShift Container Platform installs the AWS EBS CSI Driver Operator and the AWS EBS CSI driver by default in the openshift-cluster-csi-drivers namespace.
- The AWS EBS CSI Driver Operator provides a StorageClass by default that you can use to create PVCs. You also have the option to create the AWS EBS StorageClass as described in Persistent storage using AWS Elastic Block Store.
- The AWS EBS CSI driver enables you to create and mount AWS EBS PVs.
If you installed the AWS EBS CSI Operator and driver on a OpenShift Container Platform 4.5 cluster, you must uninstall the 4.5 Operator and driver before you update to OpenShift Container Platform 4.6.
5.5.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plug-ins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plug-ins.
OpenShift Container Platform defaults to using an in-tree, or non-CSI, driver to provision AWS EBS storage. This in-tree driver will be removed in a subsequent update of OpenShift Container Platform. Volumes provisioned using the existing in-tree driver are planned for migration to the CSI driver at that time.
For information about dynamically provisioning AWS EBS persistent volumes in OpenShift Container Platform, see Persistent storage using AWS Elastic Block Store.
5.6. OpenStack Manila CSI Driver Operator
5.6.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for the OpenStack Manila shared file system service.
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a Container Storage Interface (CSI) Operator and driver.
To create CSI-provisioned PVs that mount to Manila storage assets, OpenShift Container Platform installs the Manila CSI Driver Operator and the Manila CSI driver by default on any OpenStack cluster that has the Manila service enabled.
-
The Manila CSI Driver Operator creates the required storage class that is needed to create PVCs for all available Manila share types. The Operator is installed in the
openshift-cluster-csi-driversnamespace. -
The Manila CSI driver enables you to create and mount Manila PVs. The driver is installed in the
openshift-manila-csi-drivernamespace.
5.6.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plug-ins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plug-ins.
5.6.3. Manila CSI Driver Operator limitations
The following limitations apply to the Manila Container Storage Interface (CSI) Driver Operator:
- Only NFS is supported
- OpenStack Manila supports many network-attached storage protocols, such as NFS, CIFS, and CEPHFS, and these can be selectively enabled in the OpenStack cloud. The Manila CSI Driver Operator in OpenShift Container Platform only supports using the NFS protocol. If NFS is not available and enabled in the underlying OpenStack cloud, you cannot use the Manila CSI Driver Operator to provision storage for OpenShift Container Platform.
- Snapshots are not supported if the back end is CephFS-NFS
-
To take snapshots of persistent volumes (PVs) and revert volumes to snapshots, you must ensure that the Manila share type that you are using supports these features. A Red Hat OpenStack administrator must enable support for snapshots (
share type extra-spec snapshot_support) and for creating shares from snapshots (share type extra-spec create_share_from_snapshot_support) in the share type associated with the storage class you intend to use. - FSGroups are not supported
-
Since Manila CSI provides shared file systems for access by multiple readers and multiple writers, it does not support the use of FSGroups. This is true even for persistent volumes created with the ReadWriteOnce access mode. It is therefore important not to specify the
fsTypeattribute in any storage class that you manually create for use with Manila CSI Driver.
In Red Hat OpenStack Platform 16.x and 17.x, the Shared File Systems service (Manila) with CephFS through NFS fully supports serving shares to OpenShift Container Platform through the Manila CSI. However, this solution is not intended for massive scale. Be sure to review important recommendations in CephFS NFS Manila-CSI Workload Recommendations for Red Hat OpenStack Platform.
5.6.4. Dynamically provisioning Manila CSI volumes
OpenShift Container Platform installs a storage class for each available Manila share type.
The YAML files that are created are completely decoupled from Manila and from its Container Storage Interface (CSI) plug-in. As an application developer, you can dynamically provision ReadWriteMany (RWX) storage and deploy pods with applications that safely consume the storage using YAML manifests.
You can use the same pod and persistent volume claim (PVC) definitions on-premise that you use with OpenShift Container Platform on AWS, GCP, Azure, and other platforms, with the exception of the storage class reference in the PVC definition.
Manila service is optional. If the service is not enabled in Red Hat OpenStack Platform (RHOSP), the Manila CSI driver is not installed and the storage classes for Manila are not created.
Prerequisites
- RHOSP is deployed with appropriate Manila share infrastructure so that it can be used to dynamically provision and mount volumes in OpenShift Container Platform.
Procedure (UI)
To dynamically create a Manila CSI volume using the web console:
-
In the OpenShift Container Platform console, click Storage
Persistent Volume Claims. - In the persistent volume claims overview, click Create Persistent Volume Claim.
Define the required options on the resulting page.
- Select the appropriate storage class.
- Enter a unique name for the storage claim.
Select the access mode to specify read and write access for the PVC you are creating.
ImportantUse RWX if you want the persistent volume (PV) that fulfills this PVC to be mounted to multiple pods on multiple nodes in the cluster.
- Define the size of the storage claim.
- Click Create to create the persistent volume claim and generate a persistent volume.
Procedure (CLI)
To dynamically create a Manila CSI volume using the command-line interface (CLI):
Create and save a file with the
PersistentVolumeClaimobject described by the following YAML:pvc-manila.yaml
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: pvc-manila spec: accessModes:1 - ReadWriteMany resources: requests: storage: 10Gi storageClassName: csi-manila-gold2 Create the object you saved in the previous step by running the following command:
$ oc create -f pvc-manila.yamlA new PVC is created.
To verify that the volume was created and is ready, run the following command:
$ oc get pvc pvc-manilaThe
pvc-manilashows that it isBound.
You can now use the new PVC to configure a pod.
5.7. Red Hat Virtualization (oVirt) CSI Driver Operator
5.7.1. Overview
OpenShift Container Platform is capable of provisioning persistent volumes (PVs) using the Container Storage Interface (CSI) driver for Red Hat Virtualization (oVirt).
Familiarity with persistent storage and configuring CSI volumes is recommended when working with a Container Storage Interface (CSI) Operator and driver.
To create CSI-provisioned PVs that mount to Red Hat Virtualization (oVirt) storage assets, OpenShift Container Platform installs the oVirt CSI Driver Operator and the oVirt CSI driver by default in the openshift-cluster-csi-drivers namespace.
- The oVirt CSI Driver Operator provides a default storage class that you can use to create PVCs.
- The oVirt CSI driver enables you to create and mount oVirt PVs.
5.7.2. About CSI
Storage vendors have traditionally provided storage drivers as part of Kubernetes. With the implementation of the Container Storage Interface (CSI), third-party providers can instead deliver storage plug-ins using a standard interface without ever having to change the core Kubernetes code.
CSI Operators give OpenShift Container Platform users storage options, such as volume snapshots, that are not possible with in-tree volume plug-ins.