3.2. ROSA with HCP アーキテクチャー
Red Hat OpenShift Service on AWS (ROSA) with hosted control planes (HCP) では、ROSA サービスが高可用性のシングルテナント OpenShift コントロールプレーンをホストします。Hosted Control Plane は、2 つの API サーバーインスタンスと 3 つの etcd インスタンスを含む 3 つのアベイラビリティーゾーンにデプロイされます。
ROSA with HCP クラスターは、インターネットに公開された API サーバーを設置するかどうかを選択して作成できます。設置しない場合は “プライベート” クラスター、設置する場合は “パブリック” クラスターと見なされます。プライベート API サーバーには、VPC サブネットからのみアクセスできます。Hosted Control Plane には、API の公開設定にかかわらず、AWS PrivateLink エンドポイントを介してアクセスします。
ワーカーノードは AWS アカウントにデプロイされ、VPC プライベートサブネット上で実行されます。高可用性を確保するために、1 つ以上のアベイラビリティーゾーンから追加のプライベートサブネットを追加できます。ワーカーノードは、OpenShift コンポーネントとアプリケーションによって共有されます。Ingress コントローラー、イメージレジストリー、モニタリングなどの OpenShift コンポーネントは、VPC でホストされているワーカーノードにデプロイされます。
図3.1 ROSA with HCP アーキテクチャー

3.2.1. パブリックおよびプライベートネットワーク上の ROSA with HCP アーキテクチャー
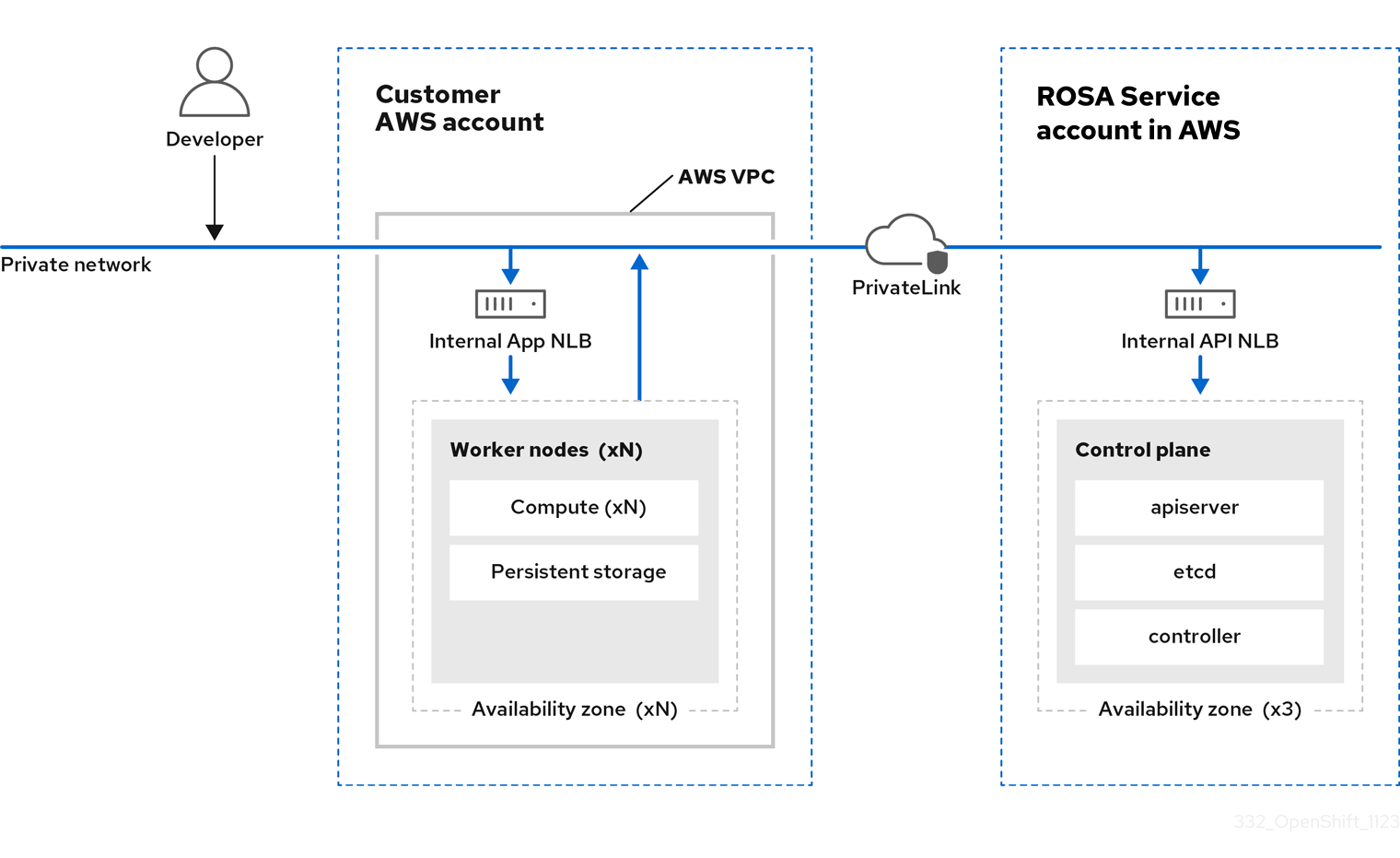
ROSA with HCP を使用すると、パブリックネットワークまたはプライベートネットワーク上にクラスターを作成できます。以下の図は、パブリックネットワークとプライベートネットワークの両方のアーキテクチャーを示しています。
図3.2 パブリックネットワーク上にデプロイされた ROSA with HCP
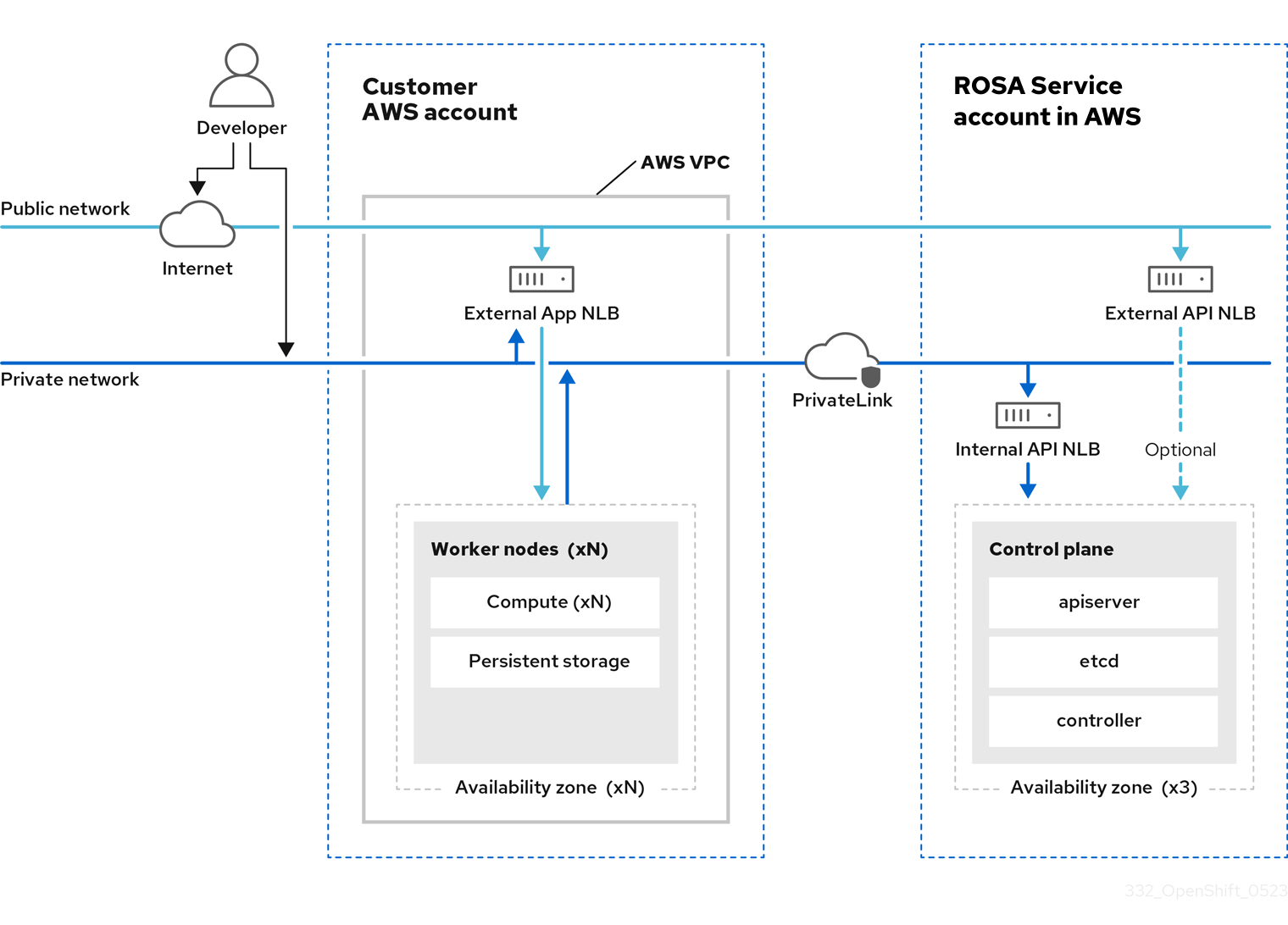
図3.3 プライベートネットワーク上にデプロイされた ROSA with HCP