第17章 PTP ハードウェアの使用
17.1. OpenShift Container Platform クラスターノードの PTP について
Precision Time Protocol (PTP) は、ネットワーク内のクロックを同期するのに使用されます。ハードウェアサポートと併用する場合、PTP はマイクロ秒以下の正確性があり、Network Time Protocol (NTP) よりも正確になります。
OpenShift Container Platform クラスターノードでlinuxptp サービスを設定し、PTP 対応ハードウェアを使用できます。
OpenShift Container Platform Web コンソールまたは OpenShift CLI (oc) を使用して、PTP Operator をデプロイして PTP をインストールします。PTP Operator は linuxptp サービスを作成し、管理し、以下の機能を提供します。
- クラスター内の PTP 対応デバイスの検出。
-
linuxptpサービスの設定の管理。 -
PTP Operator
cloud-event-proxyサイドカーによるアプリケーションのパフォーマンスおよび信頼性に悪影響を与える PTP クロックイベントの通知。
PTP Operator は、ベアメタルインフラストラクチャーでのみプロビジョニングされるクラスターの PTP 対応デバイスと連携します。
17.1.1. PTP ドメインの要素
PTP は、ネットワークに接続された複数のノードを各ノードのクロックと同期するために使用されます。PTP によって同期されるクロックは、リーダーとフォロワーの階層で構成されています。この階層は、1 クロックごとに実行される best master clock (BMC) アルゴリズムによって自動的に作成および更新されます。フォロワークロックはリーダークロックと同期しており、フォロワークロック自体が他のダウンストリームクロックのソースになることができます。
図17.1 ネットワーク内の PTP ノード

PTP クロックの 3 つの主要なタイプを以下に説明します。
- グランドマスタークロック
- グランドマスタークロックは、ネットワーク全体の他のクロックに標準時間情報を提供し、正確で安定した同期を保証します。タイムスタンプを書き込み、他のクロックからの時間の要求に応答します。グランドマスタークロックは、Global Navigation Satellite System (GNSS) のタイムソースと同期します。グランドマスタークロックは、ネットワーク内の時刻の信頼できるソースとして、他のすべてのデバイスに時刻同期を提供します。
- 境界クロック
- 境界クロックには、2 つ以上の通信パスにあるポートがあり、ソースと宛先の宛先を同時に他の宛先クロックに指定できます。境界クロックは、宛先クロックアップストリームとして機能します。宛先クロックはタイミングメッセージを受け取り、遅延に合わせて調整し、ネットワークを渡す新しいソースタイムシグナルを作成します。境界クロックは、ソースクロックと正しく同期され、ソースクロックに直接レポートする接続されたデバイスの数を減らすことができる新しいタイミングパケットを生成します。
- 通常のクロック
- 通常のクロックには、ネットワーク内の位置に応じて、送信元クロックまたは宛先クロックのロールを果たすことができる単一のポート接続があります。通常のクロックは、タイムスタンプの読み取りおよび書き込みが可能です。
NTP 上の PTP の利点
PTP が NTP を経由した主な利点の 1 つは、さまざまなネットワークインターフェイスコントローラー (NIC) およびネットワークスイッチにあるハードウェアサポートです。この特化されたハードウェアにより、PTP はメッセージ送信の遅れを説明でき、時間同期の精度を高められます。可能な限りの精度を実現するには、PTP クロック間の全ネットワークコンポーネントが PTP ハードウェアを有効にすることが推奨されます。
NIC は PTP パケットを送受信した瞬間にタイムスタンプを付けることができるため、ハードウェアベースの PTP は最適な精度を提供します。これをソフトウェアベースの PTP と比較します。これには、オペレーティングシステムによる PTP パケットの追加処理が必要になります。
PTP を有効にする前に、必要なノードについて NTP が無効になっていることを確認します。MachineConfig カスタムリソースを使用して chrony タイムサービス (chronyd) を無効にすることができます。詳細は、chrony タイムサービスの無効化 を参照してください。
17.1.2. PTP を使用するデュアル Intel E810 NIC ハードウェアの使用
OpenShift Container Platform は、シングルおよびデュアル NIC Intel E810 ハードウェアをサポートし、グランドマスタークロック (T-GM) および境界クロック (T-BC) の高精度の PTP タイミングを実現します。
- デュアル NIC グランドマスタークロック
デュアル NIC ハードウェアを備えたクラスターホストを PTP グランドマスタークロックとして使用できます。1 つ目の NIC は、Global Navigation Satellite System (GNSS) からタイミング情報を受信します。2 つ目の NIC は、E810 NIC フェイスプレート上の SMA1 Tx/Rx 接続を使用して、1 つ目の NIC からタイミング情報を受信します。クラスターホストのシステムクロックは、GNSS 衛星に接続されている NIC から同期されます。
デュアル NIC グランドマスタークロックは、Remote Radio Unit (RRU) と Baseband Unit (BBU) が同じ無線セルサイトに配置されている分散型 RAN (D-RAN) 構成の機能です。D-RAN は、コアネットワークにリンクするバックホール接続により、複数のサイトに無線機能を分散します。
図17.2 デュアル NIC グランドマスタークロック
 注記
注記デュアル NIC T-GM 構成では、単一の
ts2phcプロセスがシステム内の 2 つのts2phcインスタンスとして報告されます。- デュアル NIC 境界クロック
ミッドバンドスペクトルカバレッジを提供する 5G 電話会社ネットワークの場合、各仮想分散ユニット (vDU) には 6 つの無線ユニット (RU) への接続が必要です。これらの接続を確立するには、各 vDU ホストに境界クロックとして設定された 2 つの NIC が必要です。
デュアル NIC ハードウェアを使用すると、各 NIC を同じアップストリームリーダークロックに接続し、NIC ごとに個別の
ptp4lインスタンスをダウンストリームクロックに供給することができます。
17.1.3. OpenShift Container Platform ノードの linuxptp および gpsd の概要
OpenShift Container Platform は、高精度のネットワーク同期のために、PTP Operator とともに linuxptp および gpsd パッケージを使用します。linuxptp パッケージは、ネットワーク内の PTP タイミング用のツールとデーモンを提供します。Global Navigation Satellite System (GNSS) 対応の NIC を備えたクラスターホストは、GNSS クロックソースとのインターフェイスに gpsd を使用します。
linuxptp パッケージには、システムクロック同期用の ts2phc、pmc、ptp4l、および phc2sys プログラムが含まれています。
- ts2phc
ts2phcは、PTP デバイス間で PTP ハードウェアクロック (PHC) を高精度で同期します。ts2phcはグランドマスタークロック設定で使用されます。Global Navigation Satellite System (GNSS) などの高精度クロックソースから正確なタイミング信号を受信します。GNSS は、大規模な分散ネットワークで使用するための、正確で信頼性の高い同期時刻ソースを提供します。GNSS クロックは通常、数ナノ秒の精度で時刻情報を提供します。ts2phcシステムデーモンは、グランドマスタークロックから時刻情報を読み取り、PHC 形式に変換することにより、グランドマスタークロックからのタイミング情報をネットワーク内の他の PTP デバイスに送信します。PHC 時間は、ネットワーク内の他のデバイスがクロックをグランドマスタークロックと同期させるために使用されます。- pmc
-
pmcは、IEEE 標準 1588.1588 に従って PTP 管理クライアント (pmc) を実装します。pmcは、ptp4lシステムデーモンの基本的な管理アクセスを提供します。pmcは、標準入力から読み取り、選択されたトランスポート経由で出力を送信し、受信した応答を出力します。 - ptp4l
ptp4lは、PTP 境界クロックと通常のクロックを実装し、システムデーモンとして実行されます。ptp4lは、以下を行います。- ハードウェアタイムスタンプを使用して PHC をソースクロックに同期します。
- ソフトウェアタイムスタンプを使用してシステムクロックをソースクロックに同期します。
- phc2sys
-
phc2sysは、システムクロックをネットワークインターフェイスコントローラー (NIC) 上の PHC に同期します。phc2sysシステムデーモンは、PHC のタイミング情報を継続的に監視します。PHC はタイミングエラーを検出すると、システムクロックを修正します。
gpsd パッケージには、ホストクロックと GNSS クロックを同期するためのプログラム ubxtool、gspipe、gpsd が含まれています。
- ubxtool
-
ubxtoolCLI を使用すると、u-blox GPS システムと通信できます。ubxtoolCLI は、u-blox バイナリープロトコルを使用して GPS と通信します。 - gpspipe
-
gpspipeはgpsd出力に接続し、それをstdoutにパイプします。 - gpsd
-
gpsdは、ホストに接続されている 1 つ以上の GPS または AIS 受信機を監視するサービスデーモンです。
17.1.4. PTP グランドマスタークロックの GNSS タイミングの概要
OpenShift Container Platform は、クラスター内の Global Navigation Satellite System (GNSS) ソースおよびグランドマスタークロック (T-GM) からの高精度 PTP タイミングの受信をサポートします。
OpenShift Container Platform は、Intel E810 Westport Channel NIC を使用した GNSS ソースからの PTP タイミングのみをサポートします。
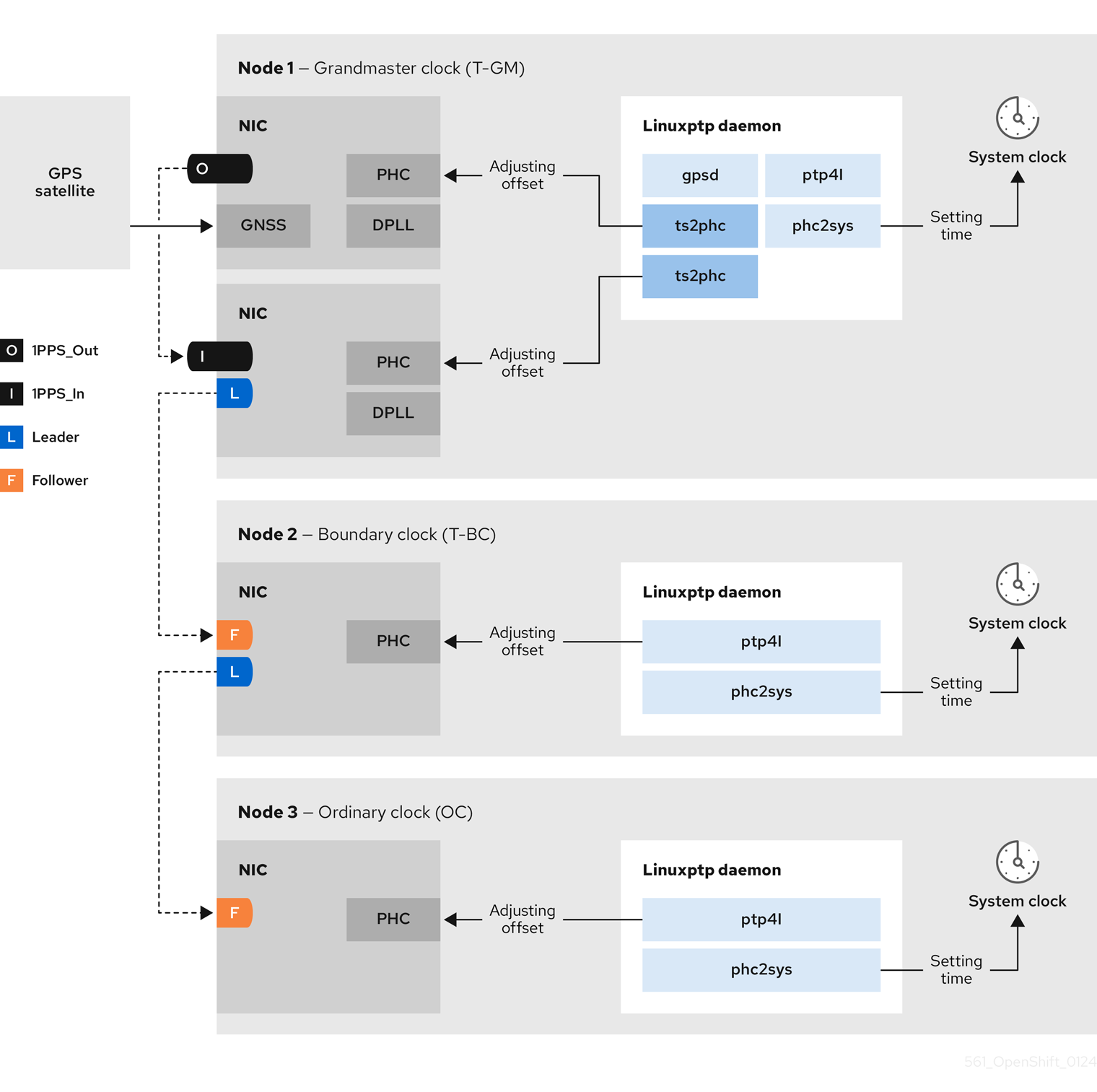
図17.3 GNSS および T-GM との同期の概要

- Global Navigation Satellite System (GNSS)
GNSS は、測位情報、ナビゲーション情報、タイミング情報を世界中の受信機に提供するために使用される衛星ベースのシステムです。PTP では、高精度で安定した基準クロックソースとして GNSS 受信機がよく使用されます。これらの受信機は、複数の GNSS 衛星から信号を受信し、正確な時刻情報を計算できます。GNSS から取得したタイミング情報は、PTP グランドマスタークロックの基準として使用されます。
GNSS を基準として使用することにより、PTP ネットワークのグランドマスタークロックは、他のデバイスに高精度のタイムスタンプを提供し、ネットワーク全体での正確な同期を可能にします。
- Digital Phase-Locked Loop (DPLL)
- DPLL はネットワーク内の各 PTP ノード間のクロック同期を提供します。DPLL は、ローカルシステムクロック信号の位相を、受信同期信号 (PTP グランドマスタークロックからの PTP メッセージなど) の位相と比較します。DPLL は、ローカルクロックの周波数と位相を継続的に調整して、ローカルクロックと基準クロック間の位相差を最小限に抑えます。
GNSS 同期 PTP グランドマスタークロックでのうるう秒イベントの処理
うるう秒は、協定世界時 (UTC) を国際原子時 (TAI) と同期させるために、時折適用される 1 秒の調整です。UTC のうるう秒は予測できません。leap-seconds.list に、国際的に合意されたうるう秒が掲載されています。このファイルは、Earth Rotation and Reference Systems Service (IERS) によって定期的に更新されます。うるう秒が処理されないと、遠端の RAN ネットワークに大きな影響が及ぶ可能性があります。これにより、遠端の RAN アプリケーションが音声通話とデータセッションを直ちに切断する可能性があります。