8.2.6. GNSS をソースとするグランドマスタークロックのホールドオーバー
ホールドオーバーにより、Global Navigation Satellite System (GNSS) ソースが利用できない場合でもグランドマスター (T-GM) クロックは同期パフォーマンスを維持できます。この期間中、T-GM クロックは内部オシレーターとホールドオーバーパラメーターに依存してタイミングの中断を削減します。
PTPConfig カスタムリソース (CR) で次のホールドオーバーパラメーターを設定することにより、ホールドオーバー動作を定義できます。
MaxInSpecOffset-
許容される最大オフセットをナノ秒単位で指定します。T-GM クロックが
MaxInSpecOffset値を超えると、FREERUN状態 (クロッククラス状態gm.ClockClass 248) に遷移します。 LocalHoldoverTimeout-
T-GM クロックが
FREERUN状態に遷移するまでホールドオーバー状態を維持する最大期間 (秒単位) を指定します。 LocalMaxHoldoverOffSet- ホールドオーバー状態にあるときに T-GM クロックが到達できる最大オフセットをナノ秒単位で指定します。
MaxInSpecOffset 値が LocalMaxHoldoverOffset 値より小さく、T-GM クロックが最大オフセット値を超える場合、T-GM クロックはホールドオーバー状態から FREERUN 状態に遷移します。
LocalMaxHoldoverOffSet 値が MaxInSpecOffset 値より小さい場合、クロックが最大オフセットに達する前にホールドオーバータイムアウトが発生します。この問題を解決するには、MaxInSpecOffset フィールドと LocalMaxHoldoverOffset フィールドを同じ値に設定します。
クロッククラスの状態の詳細は、「グランドマスタークロッククラス同期状態リファレンス」のドキュメントを参照してください。
T-GM クロックは、ホールドオーバーパラメーターの LocalMaxHoldoverOffSet と LocalHoldoverTimeout を使用してスロープを計算します。スロープは、位相オフセットが時間の経過とともに変化するレートです。これはナノ秒/秒単位で測定され、設定された値は、指定された期間内にオフセットがどれだけ増加するかを示します。
T-GM クロックはスロープ値を使用して時間ドリフトを予測および補正し、ホールドオーバー中のタイミングの中断を削減します。T-GM クロックは、次の式を使用してスロープを計算します。
スロープ =
localMaxHoldoverOffSet/localHoldoverTimeoutたとえば、
LocalHoldOverTimeoutパラメーターが 60 秒に設定され、LocalMaxHoldoverOffsetパラメーターが 3000 ナノ秒に設定されている場合、スロープは次のように計算されます。スロープ = 3000 ナノ秒/60 秒 = 50 ナノ秒/秒
T-GM クロックは 60 秒で最大オフセットに達します。
位相オフセットはピコ秒からナノ秒に変換されます。その結果、ホールドオーバー中に計算された位相オフセットはナノ秒で表され、スロープはナノ秒/秒で表されます。
次の図は、GNSS をソースとする T-GM クロックのホールドオーバー動作を示しています。
図8.5 GNSS をソースとする T-GM クロックのホールドオーバー
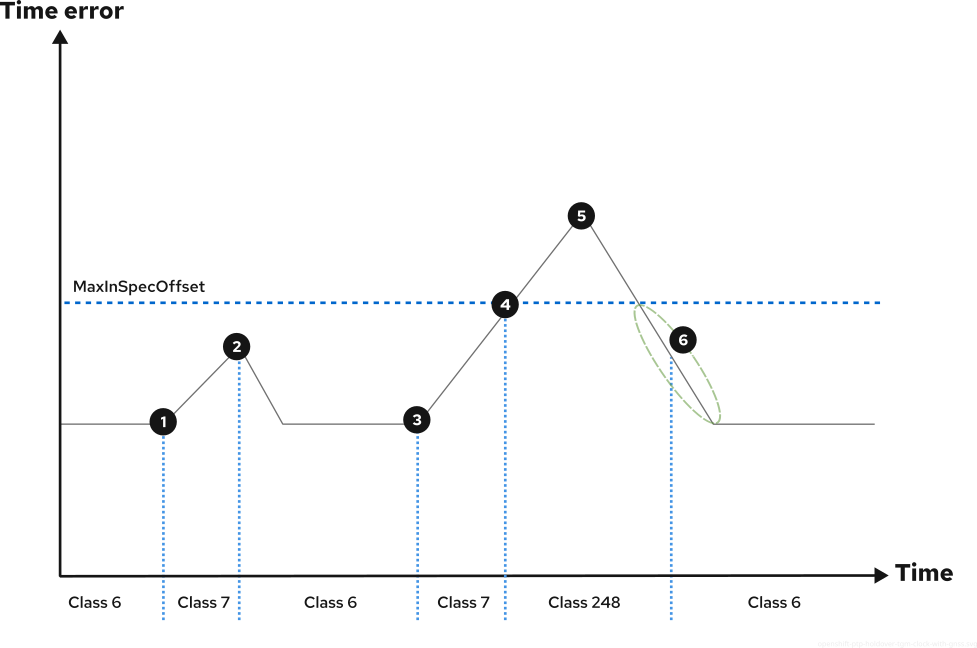
![]() GNSS 信号が途絶えたため、T-GM クロックは
GNSS 信号が途絶えたため、T-GM クロックは ホールドオーバー モードに入ります。T-GM クロックは内部クロックを使用して時間の精度を維持します。
![]() GNSS 信号が復旧し、T-GM クロックは
GNSS 信号が復旧し、T-GM クロックは ロック モードに戻ります。GNSS シグナルが復元されると、ts2phc オフセット、Digital Phase-Locked Loop (DPLL) 位相オフセット、GNSS オフセットなど、同期チェーン内のすべての依存コンポーネントが安定した LOCKED モードに達した後にのみ、T-GM クロックは再び LOCKED モードになります。
![]() GNSS 信号が再び途絶え、T-GM クロックは
GNSS 信号が再び途絶え、T-GM クロックは ホールドオーバー モードに戻ります。タイムエラーの増加が始まります。
![]() トレーサビリティの喪失が長期間続いたため、時間誤差が
トレーサビリティの喪失が長期間続いたため、時間誤差が MaxInSpecOffset の しきい値を超えました。
![]() GNSS 信号が復旧し、T-GM クロックの同期が再開されました。タイムエラーの減少が始まります。
GNSS 信号が復旧し、T-GM クロックの同期が再開されました。タイムエラーの減少が始まります。
![]() 時間誤差は減少し、
時間誤差は減少し、MaxInSpecOffset の しきい値内に収まる。